
Abstract
According to the characteristics of space missions and space environment, to slow performance deterioration and possible reliability attenuation for aerospace mechanisms, an operational reliability system control methodology is proposed in this article. A space manipulator – a kind of typical complicated aerospace mechanism – is chosen as the research object. First, considering relevant materials and structure mechanism of joint and link parts, the influence factors of operational reliability for space manipulator are divided. Then, by introducing the responding layer factors, a mapping relationship between the influence factors of operational reliability and control variables is analysed. On this basis, a new method to build a hierarchical control system of operational reliability for the aerospace mechanisms is proposed. In this method, the mechanism how the influence factors of operational reliability are introduced into the control system is defined, and an operational reliability system control model is built, which is made up of task planning, path planning, and motion control. Finally, the proposed methodology is further explained with the operational stability of a space manipulator as an example. After analysing the mapping relationship among the influence factors of operational reliability, the factors of responding layer and control variables, a multi-objective optimization method based on Nondominated Sorting Genetic Algorithm II (NSGA-II) is proposed to ensure the operation stability for a space manipulator. These optimization objectives are introduced into the optimized control model at path planning level as constraints. According to these constraints, the optimized control system can be adjusted to improve the operation stability of the manipulator, and the operational reliability is also improved during this process correspondingly. Simulation results prove the effectiveness of the proposed method.
Keywords
Introduction
It is necessary to achieve the high reliability and the long service life for space mechanisms to complete the Chinese manned space program, deep space exploration and many other national major projects. They also become one of the main difficulties in international aerospace field. The reliability of space mechanisms should be improved from two parts: the inherent reliability and the operational reliability, and particular attention must be paid to the operational reliability. 1 –5
The case of service life shortened and space mechanisms invalidated, which means the reliability of equipment degenerated rapidly, often occurs during the service process due to improper operational strategy. The performance degradation of aerospace mechanisms presents multiple parameter dynamic time-varying characteristics, which requires its motion control method should consider multiple time-varying dynamic constraints at the same time. 6,7 However, the existing task planning methods are not mature enough to solve a problem with multi-constraints and multi-optimization criteria. The path planning methods are relatively mature, but they think less about the flexible dynamics. It is difficult for the motion control method to solve a problem with time-varying dynamic constraints. 8 –13 Gao et al. 14 consider the operational reliability for the space manipulator, but it constructed the operational reliability system control model based on the degree of operational reliability, which comes from the perspective of probability distribution. Gao et al. 15 consider the operational reliability for the space manipulator, but it constructed the operational reliability system control model using the measured values of operational reliability related parameters as the system’s feedback. The system autonomously decides which control layer of the system should be optimized and how to optimize using a control level adjustment decision module. So, it’s necessary to construct a fundamental theoretical framework of operational reliability system control of aerospace mechanisms.
In order to build a technical architecture of the operational reliability system control, two key problems should be solved at the system level: (a) which optimization parameters and variables of the control system affect the operational reliability of aerospace mechanisms; and (b) in traditional control system of the aerospace mechanisms, how to introduce influence factors of the operational reliability, and how to optimize, make decisions and control them. Therefore, it’s necessary to discuss these two problems. It’s also necessary to build a control method and strategy from the system level to maintain and improve the operational reliability of aerospace mechanisms. By adjusting and self-adapting changes of control strategy, to improve the control performance of the existing control methods, and to provide theoretical basis and support for the theory of operational reliability system control, which should be a new research direction.
From the aforementioned, according to the characteristics of space missions and space environment, in order to slow performance deterioration and maintain operational reliability of aerospace mechanisms during its whole life cycle, the space manipulator – a kind of typical complicated aerospace mechanism – is chosen as the research object. In this article, a mapping relationship between the influence factors of operational reliability and control variables is provided for a typical space mission. On this basis, a new method to build a hierarchical control system of operational reliability for the aerospace mechanisms is proposed. In this method, the mechanism how the influence factors of operational reliability are introduced into the control system is defined, and the operational reliability system control model that is made up of task planning, path planning and motion control is built. By building a multiple criteria task planning model with multi-constrained conditions, a path planning model considering the impact on flexible dynamics, and a motion control model with time-varying dynamic constraints, the influence factors of operational reliability can make an effect on task planning level, path planning level and motion control level as optimization goals and criterions. At each level, different strategies are used to do adjustment and modification. At task planning level and path planning level, the planning method can be adjusted by changing the constraints and optimization criterion of control variables; at motion control level, the control performance can be improved by modifying its controller parameters.
Based on the operational reliability control system proposed in this article, the control method is further explained with the operational stability of a space manipulator as an example. After analysing the mapping relationship between the influence factors of operational reliability, the factors of responding layer and control variables, a multi-objective optimization method based on Nondominated Sorting Genetic Algorithm II (NSGA-II) is proposed to ensure the operational stability for space manipulator. The proposed multi-objective optimization method uses the minimum sum of mean value for the joint torque, the minimum for the maximal joint torque and the minimum fluctuation of angular acceleration as optimized objects. As constraint conditions, they are introduced into the optimized control model at path planning level. According to these constraints, the optimized control system could be adjusted to improve the operation stability of the manipulator, and the operational reliability is also improved during this process. Simulation results prove the effectiveness of the proposed method.
Mapping relationship between the influence factors of operational reliability and control variables for aerospace mechanisms
The tasks of aerospace mechanisms are complicated during their service time. The influence factors that affect the task completion and the cost of a single task are numerous. These factors play a crucial role in determining the task achievement and the service life of aerospace mechanisms. So, the research on the operational reliability control system should be based on the mapping relationship between the influence factors of operational reliability and control variables of aerospace mechanisms. At the same time, this mapping relationship is the basis of multi-objective optimization for path planning, fault self-processing and motion control with time-varying dynamic constraints. So, the research on the mapping relationship between the influence factors of operational reliability and control variables is significant. In the process of building a technical architecture of operational reliability control system, the aim of building the mapping relationship is to find out the main influence factors of operational reliability through some certain rules, in order to provide the input of the control system and provide theoretical basis to system control adjustment strategy.
From the perspective of operational reliability for aerospace mechanisms, using a typical on-orbit task as an example, this article analyses the influence factors of operational reliability level by level according to the type of the task. In terms of the mapping relationship, a relational expression between the influence factors and control variables and a coupling relationship between some control variables are described qualitatively or quantitatively, in order to represent the mapping relationship further.
In this research, a space manipulator – a kind of typical complicated aerospace equipment – is chosen as the research object without the loss of generality. In the process of building the mapping relationship, the influence factors of operational reliability and control variables should be analysed and classified, respectively. However, due to inexistence of direct mapping relationship between the influence factors and control variables, different from the study by Gao et al., 15 a responding layer is introduced into the mapping system. Then, the mapping relationship can be built by analysing the relationship between the responding layer and the influence factors and the relationship between the responding layer and the control variables instead, as shown in Figure 1.
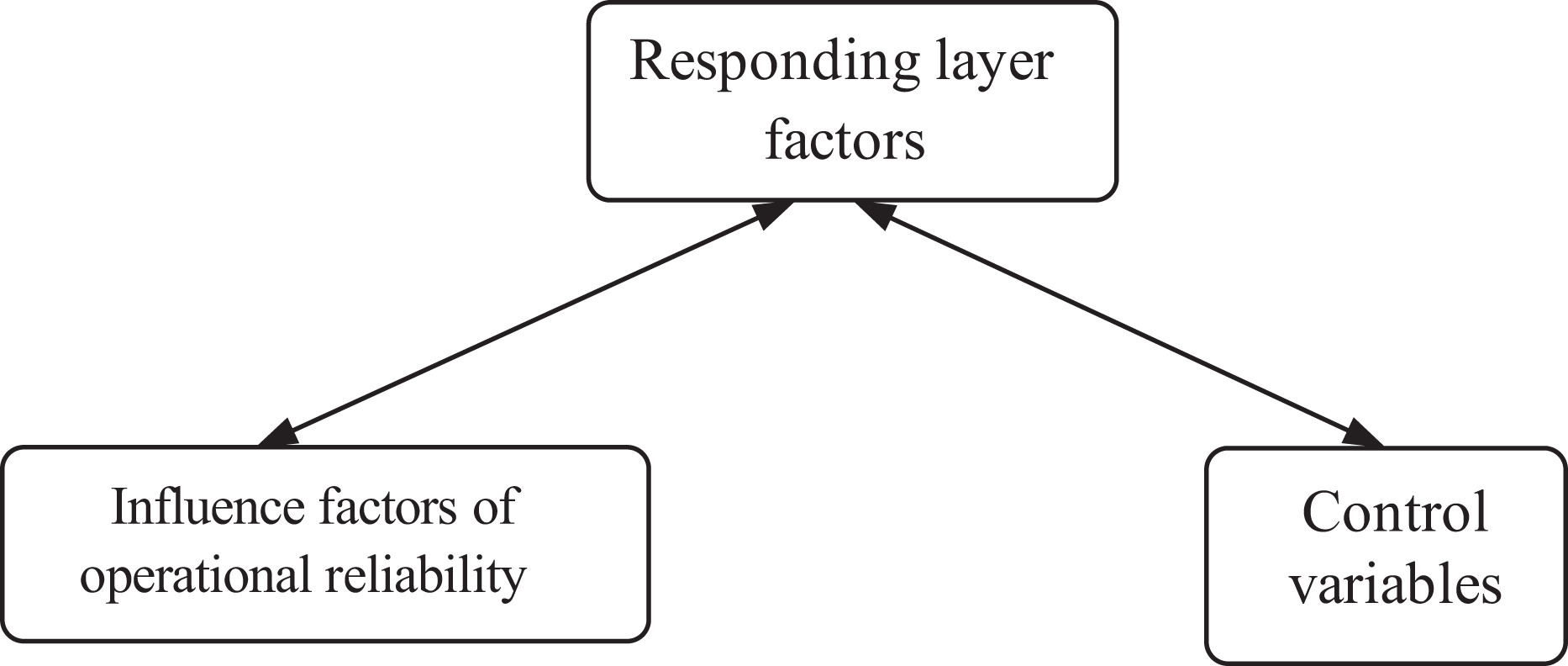
The relationship between responding layer factors, influence factors of operational reliability and control variables.
Referring to Figure 1, there is no direct mapping relationship between the influence factors and control variables. However, the control variables are directly related to the responding layer factors, and the influence factors can also directly affect the responding layer factors.
So, the mapping relationship can be built by establishing the relationship between the responding layer factors and the influence factors of operational reliability, and the relationship between the responding layer factors and the control variables. Then, the influence factors of operational reliability, the control variables and the responding layer factors could be analysed to establish the relationship between them.
Analysis of operational reliability factors
Considering with relevant materials and structure mechanism of joint and link parts, various factors that influence the operational reliability during producing, assembling and using are combed by analysing operating environment and typical on-orbit tasks for the space manipulator. 16
In respect of installation accuracy, error of output axis zero position, perpendicularity of output axis and error of measuring basis can be considered as the operational reliability factors.
In respect of transmission accuracy, error of gear position, reduction in tooth thickness and clearance between members can be considered as the operational reliability factors.
In respect of transmission accuracy, error of step angle and error of the interface of motor shaft can be considered as the operational reliability factors.
In respect of measurement accuracy, diameter run out and axial run out of resolver can be considered as the operational reliability factors.
In respect of driving torque, motor efficiency curve, loss of bearing friction, iron loss and copper loss can be considered as the operational reliability factors.
In respect of braking torque, error of friction coefficient, error of spring stiffness and error of spring pressure can be considered as the operational reliability factors.
In respect of friction torque, carrying capacity of the bearing, friction torque of bearing, friction torque of gear and so on can be considered as the operational reliability factors.
In respect of lubricating property, lubricant friction coefficient, attrition rate of lubricant and grease lubrication coefficient can be considered as the operational reliability factors.
In respect of manipulator performance, error of manipulator assembling, twist and bend of manipulator can be considered as the operational reliability factors.
Analysis of responding layer factors
The responding layer factors should be analysed by combining specific task. The no-load transfer task of space manipulator is considered as an example. The responding layer factors are analysed level by level from two aspects: task related and cost related. There are many influence factors of operational reliability. So, the execution effect and execution cost of tasks should be taken as indexes, and the influence factors of operational reliability should be divided into task-related and price-related factors during analysing. Then, the main influence factor can be found out and the responding layer factors can be determined. Among these factors, the cost-related factors at responding layer mainly include energy consumption, friction wear and so on during the operation process. The task-related factors at responding layer should be analysed with the specific task.
The no-load transfer task describes a transient motion between two configurations of space manipulator in a no-load condition. The main influence factors at responding layer for a no-load transfer task are redundancy, position and orientation of end-effecter, elastic vibration of manipulator, energy, friction wear and so on. Among these factors, the position and orientation of end-effecter and elastic vibration of manipulator are task-related factors, because they impact on the completion of the task directly. The consumption of task is determined by time, energy and friction wear, so they are cost-related factors. On the basis of the aforementioned analysis, the influence factors at responding layer in a no-load transfer task are illustrated in Figure 2.

The responding layer factors in no-load transfer task.
Analysis of control variables
From the joint level, joint driving voltage and driving current are the main controllable variables. From the view of engineering practice, the controllable variables include joint angle, joint angular velocity and joint driving torque. Then, the main controllable variables are found out.
System control model of operational reliability for aerospace mechanisms
In the control process of aerospace mechanisms, plenty of control variables and influence factor should be considered. However, the most existing control methods focus on the task-related factors and rarely consider about the factors related to its service life. So, it’s necessary to study a system control method to improve the operational reliability of aerospace mechanisms. The approach is to (a) determine the mapping relationship between the reliability factors and control variables and (b) construct the system control model of operational reliability for the space mechanisms, by active regulation to the control variables. Doing this has three objectives: (i) to minimize the cost when it performs a task under normal condition, (ii)to maximize the mission success rate when it is under abnormal condition and (iii) to minimize the performance degradation during its service years. Finally, the fundamental theoretical framework of operational reliability system control and a set of theoretical methods can be formed to provide the basis theory and effective means for the long service life and high reliability of aerospace mechanisms.
According to above ideas, a study of operational reliability control system is performed. In this research, the space manipulator – a kind of typical complicated aerospace mechanism – is chosen as a research object. A hierarchical control system introduced with influence factors of operational reliability is built, as shown in Figure 3. The basic control of manipulator is completed by task planning level, path planning level and motion control level. Different from the study by Gao et al., 15 in this article, the influence factors of operational reliability affect those three levels as optimization target or optimization criteria. Each level uses different strategy to do adjustment or modification in order to slow performance deterioration of aerospace mechanism during its service life. When the manipulator system has faults, fault self-handling module is used to evaluate the system state. According to different fault states (the joint performance degradation or complete joint failure), the control system will be adjusted using a noise suppression method or a reconstructing control model separately.

The operational reliability system control model of space manipulator.
The three-layer control structure
The control system of space manipulator is divided into three levels: task planning, path planning and motion control. The specific task is as the system input, which is divided by task planning module to obtain the intermediate points of task. Path planning module generates the path between two contiguous intermediate points and the path will be discretized to joint angle sequence in time domain. Motion control module makes angles rotate to target location by controlling motor.
The adjustment of control level with influence factors of operational reliability
According to the mapping relationship between influence factors of operational reliability and control variables, those influence factors that make task be implemented in high quality and low cost condition are chosen. Ranges of control variables are obtained through the mapping relationship. These new constrains can influence and adjust those three levels as optimization objective or optimization criterion. Each level uses different strategy to do adjustment or modification. At task planning level and path planning level, the planning method can be adjusted by changing constraints and optimization criterion of control variables; at motion control level, the performance can be improved by modifying controller parameters.
Fault self-handling
The data from system status monitoring module are analysed by fault diagnosis module. There are many kinds of faults. So, a prediction system that based on the on-orbit fault tree of space manipulator is built by the analysis of operational reliability factors. This system uses three control variables – joint angles, joint angular velocity and joint torque – as fault predictors to do research on prediction of joint fault and to obtain accurate judgment of on-orbit faults.
The operational capability and flexibility of manipulator are analysed according to the type of faults. Based on it, whether the task can be completed or not is evaluated. The conception of operational reliability is introduced. With the probability maximization of task completion and the execution effect optimization as the objective in abnormal condition, a fault-tolerant control strategy is built. Finally, a fault self-handling strategy including fault prediction, fault analysis, mission evaluation and fault-tolerant control is established.
If the fault sources run out, the fault self-handling would be activated, including the online adjustment of control model, model reconstruction and restrain of parameters mutation. Model reconstruction includes kinematics and dynamics model reconstruction. Online adjustment includes the adjustment of control models and the operating parameters. The adjustment of control models includes adjustment of constraints, control objective, parameters mathematical relationship and recalculating the mathematical model. The adjustment of motion parameters includes adjustment of the parameters mutation due to joint faults and model reconstruction. Restrain of parameters mutation is achieved by introducing compensation term to make the manipulator operate smoothly during its control model reconstruction and adjustment.
Optimization method of motion stability of space manipulator
No-load transfer task of space manipulator is considered as an example in this section. With a given accuracy, the operational reliability system control should reduce the loss brought by inappropriate uses and slow the performance degradation to maintain the operational reliability of manipulator. In this process, the influence factors of operational reliability can be represented by bearing clearance, error of gear position, error of bearing motion and so on. Meanwhile, the degradation of those factors can be represented indirectly by the factors at responding layer, and the factors at responding layer can be affected by active control of the control variable layer. Finally, new constraints are imposed to joint torque, joint angular velocity and joint angular acceleration. By active control, the operational reliability can be improved.
Based on the aforementioned analysis, the mapping relationship between influence factors of operational reliability and control variables in no-load transfer task is shown in Figure 4.

The mapping relationship between influence factors of operational reliability and control variables in no-load transfer task.
Further, the relationship between influence factors at responding layer and control variables is shown in the following formula. 17,18
The formula to compute the energy consumption f of manipulator is as follows

where
The relationship between the frictional wear and the control variables is as follows

where μ is the friction coefficient,
From the relevant reference and aforementioned analysis, smooth, moderate operation for the mechanical and electrical products always has a positive impact on no matter the wastage of the mechanical structure or its service life of electrical units. The optimization to the stability of manipulator can improve its quality of the task implementation and reduce operation cost, so that the operational reliability is maintained effectively. These controllable variables that include joint angular velocity, angular acceleration and joint torque are the concrete representation of stability on the control variable layer. Among them, the joint torque directly represents the energy consumption during the process of task, and it can also be a measurement index of frictional wear of manipulator joint. Excessive energy consumption or severe friction and wear can make the bearing clearance larger and speed in tooth thickness faster. The maximum joint driving torque is directly related to friction and wear of joint. The friction and wear brought by excessive instantaneous driving torque could increase the interface error of motor shaft and make the driving torque go over its limit, meanwhile, the load capacity of end-effecter will be reduced in this way.
Considering the long-term on-orbit working condition of manipulator, the variation of driving torque would become gently when the joint angular velocity, angular acceleration change smoothly and less fluctuation, the numerical value of jerk – the derivative of joint angular acceleration – is small and the joint torque is distributed evenly. It would reduce the vibration range of manipulator and the friction and wear, so that the motion reliability and operational reliability are improved.
So, on the premise of completing the no-load transfer task, the minimum sum of mean value of each joint torque, the minimum of the maximum driving torque and the minimum jerk of joint are as optimization criterions, which are introduced into the path planning layer as new constrains. Then, the NSGA-II is used to achieve the lower cost of task and slow the performance degradation, so that the operational reliability of manipulator is maintained.
Dynamic model of the manipulator
The basic dynamic model used in this article is established shown in Figure 5. 19 The manipulator shown in Figure 5 is composed by n links and joints. In order to use the recurrence relation of spatial operator algebra, the links are numbered as 0–n from end-effecter to base. The recurrence calculation from the end-effecter to the base is defined as inward iterations to compute force and torque. The recurrence calculation from the base to the end-effecter is defined as outward iterations to compute the angular velocity and acceleration. If the manipulator has a base, the base can be treated as n + 1th link.
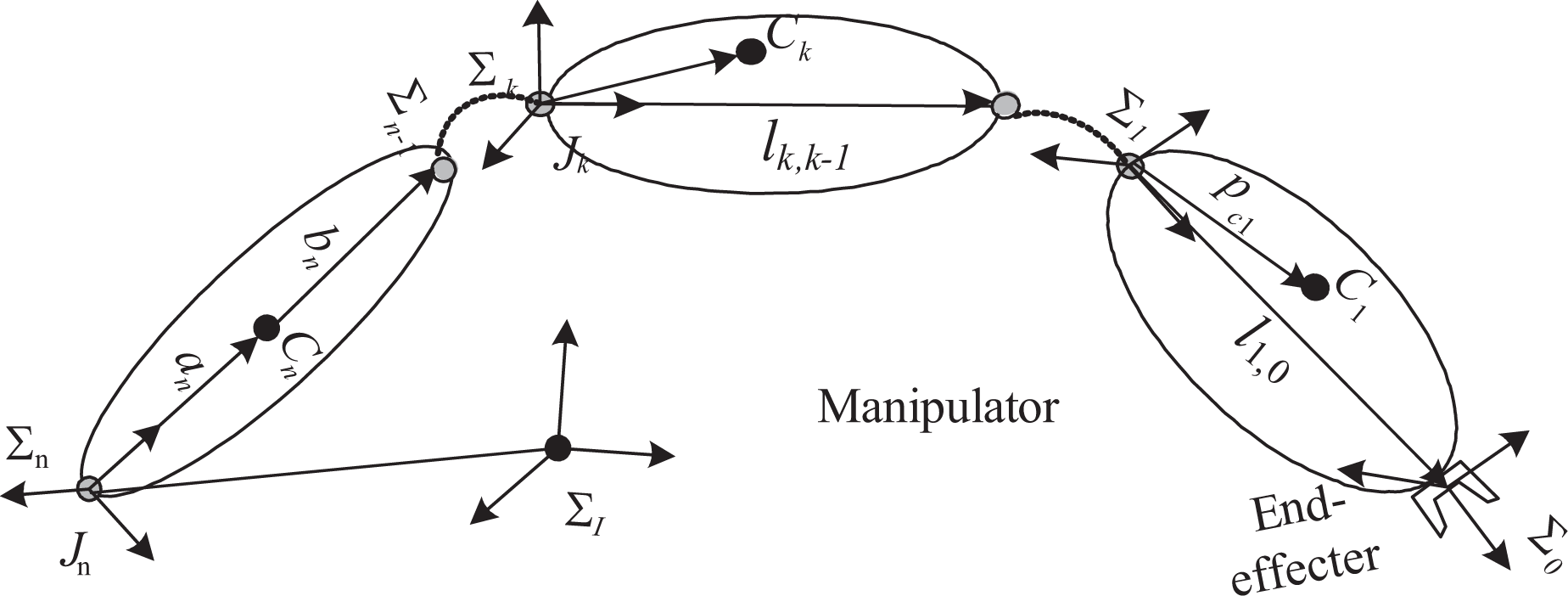
Multi-DOF space robotic manipulator model based on spatial operator description.
From Figure 5, the symbol of manipulator used in the article is shown as follows. ΣI is the inertia coordinate system; all of the recurrence calculation of manipulator is done in inertial coordinate system, Σk is the coordinate system of kth link, which is defined on the joint, Jk represents the kth joint, Jn is the base of manipulator, J0 is the connection with the outside of end-effecter, Ck is the position of mass centre of kth link, ak is the vector from Jk to Ck, bk is the vector from Ck to
The calculation flow chart of inverse dynamic of manipulator is shown in Figure 6.
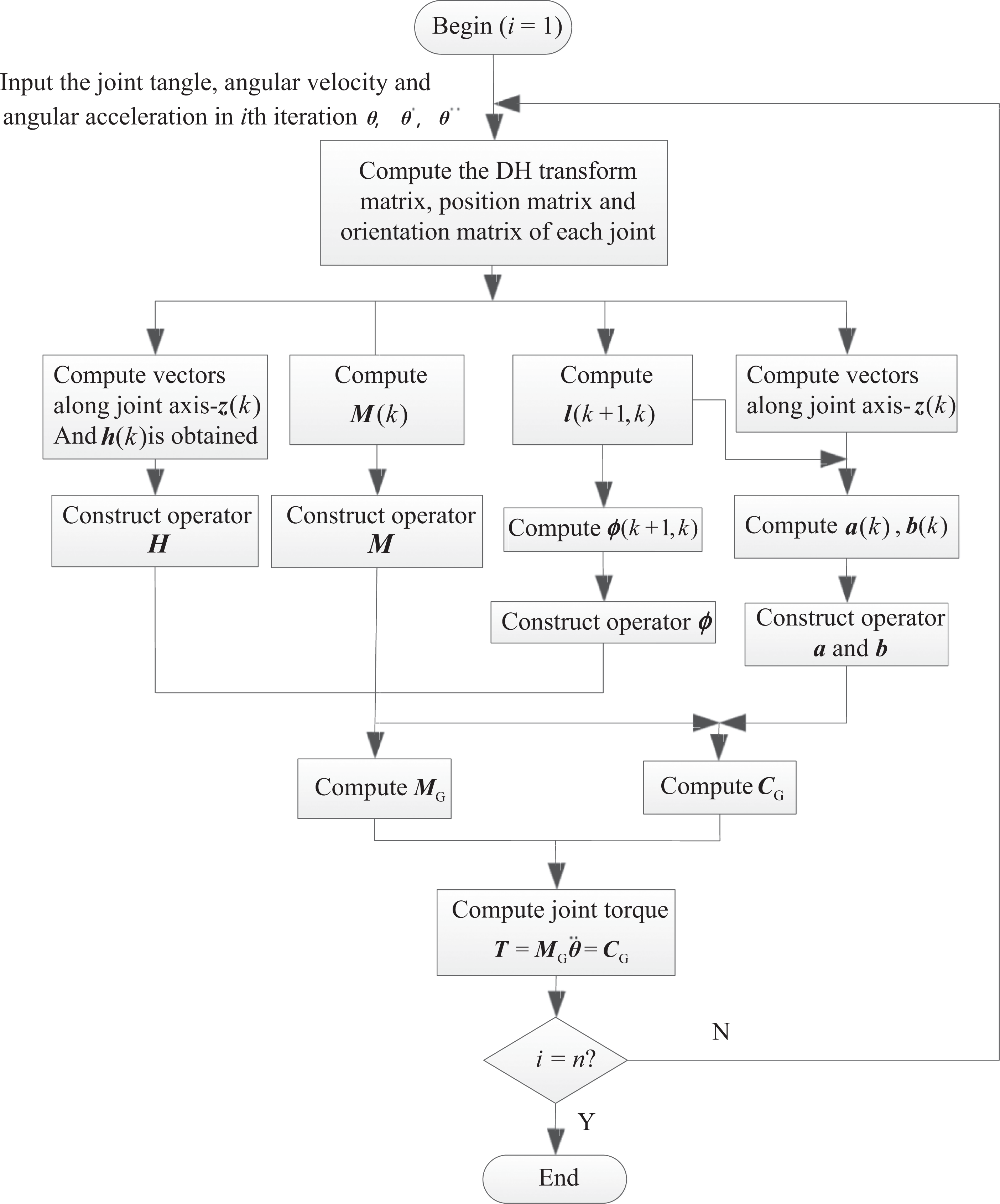
Inverse dynamics calculation flow chart based on spatial operator algebra.
According to Figure 6, the dynamic equation is shown as follows

where
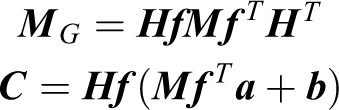
where
The description of optimization problem
The parameterization to joint variables
Seven times polynomial sinusoidal interpolation is used to do interpolation traversal of each joint. 20 According to the requirement for the continuous trajectory and continuous velocity, the expression of joint angle is obtained. Then, the coefficients of the polynomial can be expressed with some of the coefficients using the given initial conditions as constrains when the manipulator implements the point-to-point transfer tasks. These coefficients can be solved as the control parameters in optimization algorithm.
According to the aforementioned analysis, the expression of joint angle is shown as follows

where
where
Choosing the optimization control parameters
The constraint equations are built using the initial joint angle, joint angular velocity, joint angular acceleration and end angle, end angular velocity and end angular acceleration, which are given in the point-to-point transfer task

where

where tf is the planning time; the vector of parameters is represented as
Description of optimization problem
In this article, the minimum sum of mean value of each joint torque, the minimum of the maximum driving torque and the minimum sum of mean value of joint jerk are used as optimization objective. It can be represented as follows

where the sum of mean value of each joint torque Z is represented as
The expression of the sum of mean value of each joint torque is shown as follows

where

where τi is the ith component in the vector of joint torque
The vector of joint torque τ is obtained using the basic dynamic equation. The basic dynamic equation of space manipulator is shown as follows

where θ represents the n dimensional column vector of joint angle,
The maximum driving torque Tmax in the operation is defined as follows

The jerk of ith joint can be obtained by the derivative of angular acceleration

The sum of mean value of joint jerk is defined as follows

where
The optimization with NSGA-II
In this article, NSGA-II is chosen to optimize the path trajectory of space manipulator and obtain the Pareto non-dominated solutions. 21,22 Then, a solution is picked out from the solutions with certain rules. The path trajectory obtained from the solution can approach optimization objectives aforementioned simultaneously.
The specific steps of using NSGA-II to do the optimization are shown as follows:
Step 1: Initialize the parameters used in NSGA-II, which include the size of population-NIND, the mutation operator-Pm, the selection operator-Pc, the crossover operator-GGAP and the largest number of iterations-Gen. Then, NIND individuals are generated randomly.
Step 2: Coefficients of the polynomial –
Step 3: Calculate the objective function value of each individual in the population. Then, the fitness vectors consist of three objective function values – Initialize the crowding degree id of every individual to be zero. Pick out one component of the fitness vector randomly and sort those vectors in ascending order of the chosen component. Crowding degree of the first and the last individual is set to be infinite, that is, Crowding degrees of other individuals are calculated using the following formula

where id is the crowding degree of the ith individual.
Step 4: The tournament selection is used to pick out solutions according to the priorities of the non-dominated set and the crowding degree of each individual. Those chosen individuals will be used to do the crossover and mutation later. The specific procedures of the Tournament Selection are shown as follows:
NIND·Pc individuals are chosen from the population randomly. According to the priorities of the non-dominated set and the crowding degree of each individual, the individuals within the dominant set are chosen preferentially. Then, an individual with high crowding degree is chosen from those individuals. These two procedures are repeated until NIND individuals are picked out.
Step 5: Do the crossover and mutation to the population obtained in Step 3 according to the probability GGAP and Pm, respectively. Offspring population Qt will be obtained.
Step 6: The offspring population Qt and the parent population Pt are combined to a new population I. Set t = t+1.
Step 7: Objective function values of all individuals in the population I are calculated and their fitness vectors are obtained. Then, the fast non-dominant sort is done for every individual based on their fitness vectors. Several solution sets Zi are obtained. Within each solution set, the crowding degree of each individual is calculated and a new parent population Pt is obtained by certain rules. The concrete rules are shown as follows: Find out the solution set Zi (i = 1). The number of individuals in Zi is N. If N is more than NIND, pick out NIND individuals whose crowding degree is relatively large and put them into the new parent population Pt. Then, go to step 8. If the number N of individuals in Zi is equal to NIND, put all the individuals of Zi into Pt and go to step 8. 4) If N is less than NIND, put all the individuals of Zi into Pt and set NIND = NIND-N,
Step 8: Judge whether t is equal to Gen, the maximum generation. If t = Gen, go to step 9, otherwise, go to step 3.
Step 9: All the individuals of Pt is Pareto optimal set. The algorithm is end.
The optimal solution can be picked out from the Pareto optimal set by certain rules. The optimal solution is the coefficients of polynomial of joint angle. Then, the optimized plan trajectory of a space manipulator is obtained. For example: when the manipulator carries a heavy load during a transfer task, its joint driving torque will increase relatively. In order to ensure the manipulator has enough loading capability, the solution that can make the maximum driving torque minimum should be chosen at the first place. When the manipulator implements a no-load transfer task, the energy consumption should be considered preferentially. In order to reduce its energy consumption, the sum of mean value of joint torque should be treated as a main optimization objective. So, the solutions with smaller sum of mean value of joint torque should be picked out preferentially. Then, the other two components of the fitness vector will be considered to determine the final optimal solution.
Simulation and analysis
The simulation condition
A 7-DOF space manipulator is used in the simulation. The manipulator consists of seven rotary joints and two-long straight links. The structure of the manipulator is symmetrical. The D-H coordinate system of the 7-DOF manipulator is shown in Figure 7.

D-H coordinate system of the 7-DOF space robotic manipulator.
Length of those links shown in Figure 7 is d 1 = 1.2 m, d 2 = 0.53 m, d 3 = 0.53 m, d 4 = 0.52 m, d 5 = 0.53 m, d 6 = 0.53 m, d 7 = 1.2 m, a 3 = 5.8 m and a 4 = 5.8 m.
The D-H parameters of the manipulator are shown in the following Table 1.
D-H parameters of the space robotic manipulator.

The origin coordinate of the first joint coordinate system with respect to the base coordinate system is rca 0 = {0.2, 0, 2}. The posture deviation is {0,0,0}.
Table 2 shows the mass properties of the space manipulator. The inertia parameters and the mass centre coordinates are represented in Table 2.
Mass properties of the space manipulator.

In the joint space, the point-to-point transform task is defined as follows. Initial joint angles of the manipulator are set as θ int = [−20°, 0, −10°, −100°, 120°, 180°, 70°]. One of the desired termination angles is θ des = [0, 15°, −30°, −110°, 140°, 165°, 90°]. The task planning time is tf = 20 s.
In our simulation, the base of the manipulator is fixed. The coefficients of the polynomial proposed in section ‘The description of optimization problem’ are used as control parameters. The minimum sum of mean value of each joint torque, the minimum of the maximum driving torque and the minimum sum of mean value of joint jerk are used as optimization objective of NSGA-II. The simulation is done in MATLAB R2015b and the optimization path trajectory is obtained. In this simulation, the load mass on the end-effecter is m load = 5000 kg; the inertia tensor matrix is

The largest number of iterations (Gen) is 100. The mutation operator (Pm
) is 0.03, the selection operator (Pc
) is 0.7 and the crossover operator (GGAP) is 0.85. Constraints of the task are shown as follows: the range of angel is [−180°, 180°], the range of angular velocity is
Analysis of the result
The no-load transfer task is supposed as a given task and the energy consumption is considered as a main optimization objective. The genetic algorithm (GA) is used to optimize the sum of mean value of torque. The maximal number of iteration is 100, and the individual number of population is 30. The mutation operator is 0.03, the selection operator is 0.7 and the cross operator is 0.85, just as same as the NSGA-II used in the article.
To clarify, the optimal solution of each group using NSGA-II in Table 3 is picked out from the Pareto optimal set of each group according to the minimum of the sum of mean value of torque. The optimal result and the result obtained by GA are shown as follows. The multi-group simulation results are used to avoid the occasionality of the results and to make the comparison more convictive.
The optimal result and the result obtained by GA.

GA: genetic algorithm.
From Table 3, the average of sum of mean value of torque is 4273.5 Nm when using NSGA-II to do the optimization. It increases only about 2.9% compared with that when GA is used. But the average of the maximum joint driving torque and the sum of mean value of jerk decrease about 15.6 and 18.1%, respectively.
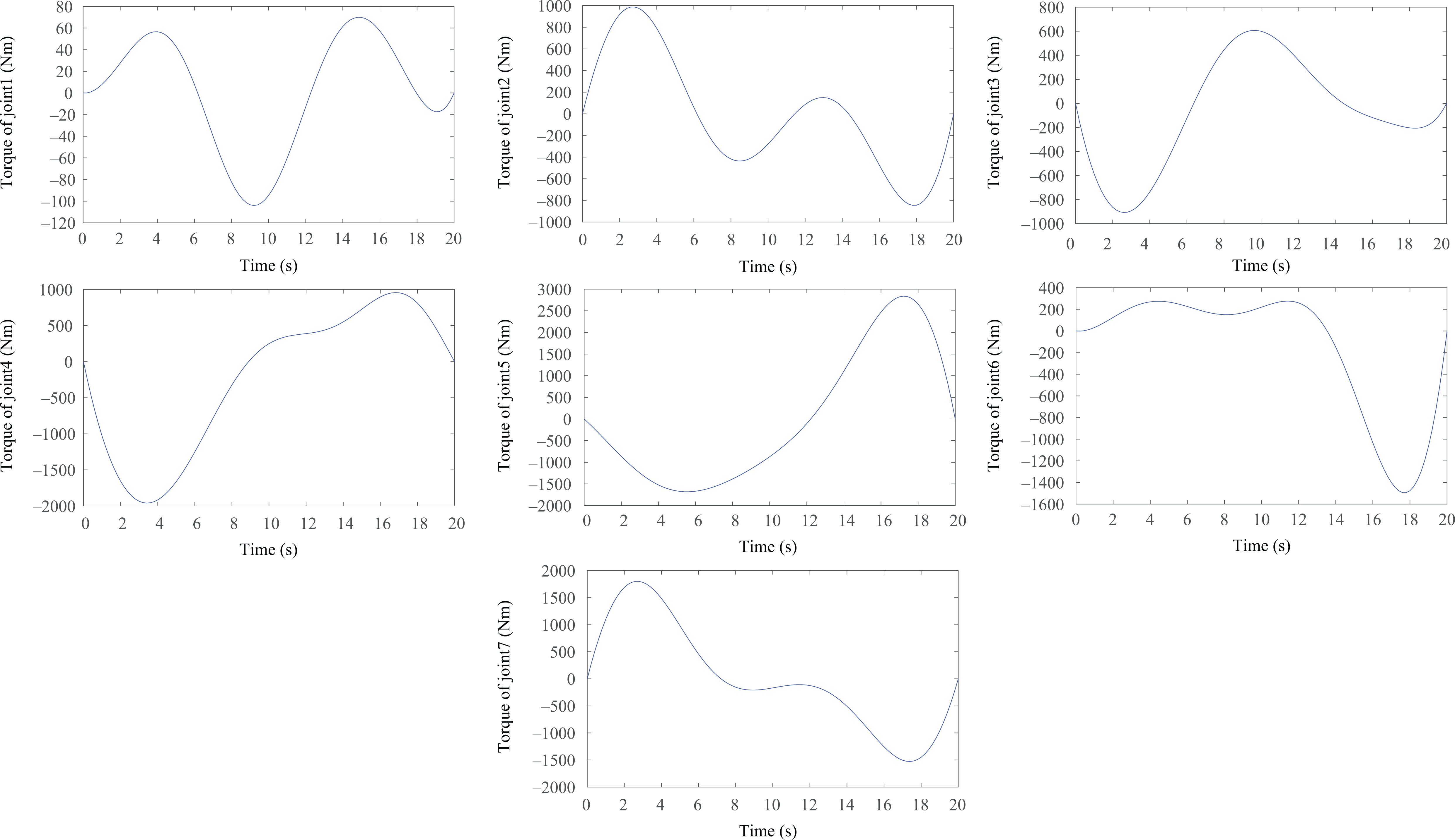
The solution of 10th group using NSGA-II is chosen as a typical solution, because it can represent the average of these 10 group solutions as most. The solution of third group of GA is chosen as a typical solution for the same reason. Using these two solutions to get the polynomial coefficients of joint angle, the curves of joint torque are shown as follows.
Figures 8 and 9 reflect the variation of joints torque during the task process. Comparing the joint torque optimized by NSGA-II with that of GA, it’s not difficult to find that the torque fluctuation of some joints optimized by NSGA-II is less than which is obtained by GA, especially in curve (2) and (6). The fluctuation reflects the variation of driving torque of motor. The driving torque varying frequently can intensify the abrasion and reduce the life of motor. Then, the operational reliability of manipulator will decrease relevantly.

The curves of joint torque N1–N7 optimized by NSGA-II.
The curves of joint torque N1–N7 optimized by GA. GA: genetic algorithm.
Conclusion
A hierarchical control system model based on the operational reliability is proposed in this article. Space manipulator – a kind of typical complicated aerospace mechanism – is chosen as a research object. First, the influence factors of operational reliability for space manipulator are divided. Then, a mapping relationship between the influence factors of operational reliability and control variables is analysed preliminarily. On this basis, the mechanism how the influence factors of operational reliability are introduced into the control system is defined, and the operational reliability system control model is built, which is made up of task planning, path planning and motion control. Finally, as an example, a multi-objective optimization method based on NSGA-II is used to ensure the operational stability for space manipulator. The multi-objective optimization method uses the minimum sum of mean value for the joint torque, the minimum for the maximal joint torque and the minimum fluctuation of angular acceleration as optimized objects. As constraint conditions, they are introduced into the operational reliability system control model at path planning level. According to these constraints, the optimized control system is adjusted to improve the operation stability of the manipulator. Simulation results show that the trajectory obtained by the proposed method has a good performance on operational stability, which can decrease the friction wear of the joints and improve the load capacity of the end-effecter to some extent. In this way, the operational reliability for space manipulator can be improved.
Future work
Supported by the National Program on Key Basic Research Project (973 Program) in China, Fundamental theory research on system control of operational reliability in aerospace mechanism, my colleagues and I who come from the Robotics Key Laboratory of Ministry of Education are developing a set of novel robot control methods.
The system control of operational reliability strives for three objectives: to minimize the cost when it performs a task under normal condition, to maximize the mission success rate when it is under abnormal condition and to minimize performance degradation during its service years. By constructing a multi-objective optimization function set including tasks reliability, dynamic geometry physical parameters and time-varying dynamics characteristics, this project is going to make research on the related methods of real-time adjustment and control to reliability of space mechanism by utilizing the function set, and to construct fundamental theoretical framework of operational reliability system control of aerospace mechanism. It is a sophisticated research work that relates to the multiple disciplines knowledge of control-related field. Further, in-depth study, in many aspects, will be made in future, and some are shown as follows: (1) Building a mapping relationship between influence factors of operational reliability and control variables is a long-term effort. The influence factors are numerous, so the establishment of the relationship relies on the further research of related technology. With the intensive research of the reliability theory for space mechanisms and related technical level enhancement (the action mechanism of the reliability factors for space mechanisms, improvement of state aware and measuring means and so on), more operational reliability factors can be decided. Furthermore, their evolution laws and the corresponding relationships with control variables can be clear in future.
For example, an influence factor, clearance, its relationship with control variables requires further research. In future, the relationship between the clearance and the factors at responding level, such as accuracy of end-effecter, will be built. The effect of the influence factors affecting on the responding layer factors will be analysed. Then, the relationship between clearance and control variables can be built. Based on the above, control variables can be adjusted using certain control strategy, which will keep or delay the attenuation of influence factors and improve the operational reliability for aerospace mechanism.
(2) ‘Library of time-varying constraint’ includes internal constraints and external constraints. Internal constraints consist of time-varying of lubrication, time-varying of the gap and so on; external constraints consist of time-varying of configurations, time-varying of contact, time-varying of load, time-varying of fault and so on. A motion control model with time-varying dynamic constraints is a part of the operational reliability system control method for space mechanisms.
By the analysis of response process and closed-loop control of operational reliability system, time-varying constraints are disturbance factors of control system to affect the motion stability and accuracy of aerospace mechanism, which decrease operational reliability as well. So, how to introduce time-varying constraints into motion control level needs further research.
(3) The operational reliability system control model of space manipulator under fault states needs to be improved. Under fault state, what kind of process should be used to complete fault self-handling, and how to achieve the compliant control and maximize the completion probability of the task, are the problems to be solved in future.
Footnotes
Acknowledgements
The authors would like to thank their colleagues from the Robotics Research Group for helpful discussions and comments on this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported in part by Key Project of Chinese National Programs for Fundamental Research and Development(973 program) (No. 2013CB733000), National Natural Science Foundation of China (No. 61573066) and National Natural Science Foundation of China (No. 61403038).