
Abstract
This paper investigates resource-efficient sliding mode control for a quadrotor unmanned aerial vehicle (UAV) subjected to multiple faults and hybrid cyber-attacks. We derive a comprehensive dynamic model that captures actuator-bias faults, partial failures, and false data injection attacks. Based on this, we design adaptive event-triggered terminal sliding mode controllers for both position and attitude control. To counter denial-of-service (DoS) attacks, we develop a forgetting factor compensation scheme that mitigates the effects of DoS attacks occurring in both feedback and forward channels. Lyapunov analysis guarantees closed-loop stability of the proposed schemes, precludes Zeno phenomena, and improves robustness to the combined false-data-injection (FDI) attacks and DoS attacks. Several simulations demonstrate that the proposed method maintains fast and accurate trajectory tracking while significantly reducing the impact of DoS and FDI attacks.
Keywords
Introduction
Quadrotor unmanned aerial vehicles (UAVs) represent a typical underactuated and strongly coupled nonlinear system with six degrees of freedom but only four independent control inputs. Due to their simple structure, robust payload capacity, and cost-effectiveness, UAVs are widely used in both military and civil fields.1–3 With rapid advancements in UAV technology, numerous results have been developed. For instance, Gong et al. 4 studied a resilient path planning scheme for UAV swarms against covert attacks, Liu et al. 5 investigated an observer-based adaptive fuzzy finite-time attitude control method for quadrotor UAVs experiencing disturbances, and Li et al. 6 designed a robust cooperative path following control strategy for UAVs. Most of these studies, however, presume fault-free hardware. In practice, component aging, unstable power supply, and electromagnetic interference often emerge, especially in the actuators, leading to the UAV encountering various faults and disturbances. Hence, designing an effective method to mitigate the effects of actuator faults is one of the primary motivations of this paper.
Recent research has begun to address actuator anomalies. For example, Su et al. 7 proposed a fault-tolerant control method for an overactuated UAV, Thanaraj et al. 8 designed extreme learning neuro-fuzzy algorithms for quadrotor UAVs, and Yao et al. 9 formulated a neural network-based adaptive sliding mode fault-tolerant control method for a carrier-based UAV. However, most existing solutions handle only one type of fault, such as partial failures or bias faults in the UAV. In practical applications, the UAV may experience concurrent partial failures and bias faults, which can significantly impact its stability and performance. Hence, when designing a controller, it is meaningful to consider both types of faults simultaneously.
Moreover, few approaches improve robustness and response speed, which are crucial for UAV performance. Sliding mode control (SMC) is particularly effective due to its advantages of fast response, insensitivity to parameter changes, strong disturbance rejection, and straightforward implementation.10–12 This has attracted considerable attention from scholars, resulting in several valuable schemes. For example, Baek and Kang 13 studied a practical synthesized SMC scheme for quadrotor UAVs with abrupt and external disturbances, Pan et al. 14 examined an adaptive SMC method for a quadrotor with disturbances, and Sun et al. 15 investigated a finite-time terminal SMC approach for tailless full-wing configuration UAVs. The existing SMC methods mainly include linear SMC and nonlinear SMC, with the latter encompassing terminal and integral SMC. Since terminal SMC is faster than integral SMC, this paper focuses on designing a terminal SMC method for UAVs to achieve quicker convergence.
It is noted that UAVs are also cyber-physical systems and are vulnerable to cyberattacks. Until now, cyberattacks have mainly been classified into denial-of-service (DoS) attacks,16–18 deception attacks,19–21 and false data injection (FDI) attacks.22–24 DoS attacks are easy to launch, where attackers jam the communication channels, preventing the transmitted data from reaching its destination. Deception attacks can be treated as a specific form of the FDI attacks. The FDI attacks involve injecting false data into the original data of the communication channels. Recently, mitigating the effects of cyberattacks has become a pressing topic for UASs, and several innovative approaches have been developed. For instance, Wang and Gursoy 25 formulated a jamming-resilient path-planning method for UAVs against DoS attacks, Gong et al. 26 developed a distributed resilient time-varying formation-tracking control scheme for UAVs with composite attacks, and Wang and Liu 27 studied a detection and defense method of time-varying formation for UAVs under FDI attacks and disturbances. Although resilient control methods have been developed for various cyberattacks, most results address only a single type of cyberattack. Hence, designing a resilient control method for UAVs to prevent DoS and FDI attacks simultaneously is challenging.
Additionally, the methods mentioned above require sufficient communication bandwidth to support diverse equipment in UASs. Generally, the communication bandwidth is restricted by communication technology and hardware costs, so reducing the communication burden and realizing resource-efficient control are necessary for UASs. Event-triggered control (ETC) is a practical approach that reduces the controller update frequency and decreases energy consumption, attracting considerable attention from scholars.28–30 Several ETC methods have been developed for UAVs. For instance, Wu et al. 31 studied an event-triggered adaptive neural network cooperative control method for UAVs with prescribed performance, Yan et al. 32 investigated an event-triggered formation control for UAVs with time-delays, and Yu et al. 33 designed an event-triggered adaptive fuzzy fault-tolerant attitude control scheme for a tailless flying-wing UAV. It is noted that although some interesting ETC methods have been developed for UAVs, most of these methods have been designed with a fixed event-triggered condition. However, comparing the ETC method with a fixed threshold 34 and a relative threshold, 35 the analysis reveals that the relative threshold strategy can significantly reduce event-triggered times. Hence, designing an ETC scheme with the relative threshold for the UAVs is valuable work.
Building upon the above analysis, this paper addresses a series of critical challenges that UAVs encounter during time-varying trajectory tracking. These challenges include bias faults, partial component failures, false data injection attacks, DoS attacks, and constraints imposed by limited communication bandwidth. To enhance the efficiency of the tracking process, a fast terminal SMC approach is explored, which is designed to achieve a more rapid convergence rate. The key contributions of this research are outlined as follows:
Enhanced UAV model for faults and attacks: We model the scenario of the simultaneous occurrence of bias faults and partial failures and reconstruct the UAV dynamics model with injection attacks. Compared to existing models,4,5 the reconstructed model is more closely aligned with the actual application.
Adaptive event-triggered terminal sliding mode control: We design an adaptive event-triggered terminal sliding mode controller. Compared to existing ETC methods,32,33 the designed method achieves a faster convergence speed with fewer trigger events.
Dual-channel DoS attack compensation scheme: We formulate a compensation scheme based on a forgetting factor for UASs against dual-channel DoS attacks. Compared to existing compensation methods,16,17 the proposed method is more suitable for successive DoS attacks in both forward and feedback communication channels.
System model and problem formulation
Coordinate systems setup
Before establishing the UAV model, it is imperative to define the coordinate systems. As depicted in Figure 1,
The attitude and position of the UAV constantly change, posing challenges for model construction. To address this, a rotation matrix transforms the body coordinate system into the Earth coordinate system, representing the rotation of the UAV coordinate system with Euler angles. The rotation matrix 36 is expressed as follows:

where ‘s’ denotes sin, and ‘c’ denotes cos.

Schematic diagram of a UAV’s coordinates.
Actuator faults modeling
The UAV actuators are vulnerable to unexpected behaviors due to several factors. Component aging, unstable power supplies, and electromagnetic interference can cause the actuators to deviate from their normal operation. These deviations not only pose risks to the safe execution of UAV tasks but also define what are known as actuator faults. Given that actuator bias faults and partial failures often coincide, the following formula outlines the construction of an actuator fault model to account for these combined fault scenarios.

where

where
The kinematic model is given as:

where
DoS attacks
This paper examines the impact of DoS attacks on the controller when sending control signals
System architecture
The UAV employs a two-loop control structure, consisting of an inner loop for attitude regulation and an outer loop for position regulation. The schematic diagram of the designed method for the UAV system in this study is illustrated in Figure 2, where the desired trajectory is denoted as

The schematic diagram of the designed method for the controlled UAV.
Controller design
Position controller design
This section designs an event-triggered position subsystem controller with a DoS attack compensation strategy under dual faults and injection attacks. Based on the system (3), a set of virtual control inputs is designed:
The model of the position subsystem can be reformulated in the form of state equations:

The tracking errors along the

Since the control solution processes for the three axes are similar, this section will only exemplify the derivation of the controller
Then, a global fast terminal sliding surface is designed as:

where
Taking the derivative of equation (8), substituting it into system (6), it yields:

Then, a convergence rate is designed as:

where
The expression for the controller can be derived as:

Similarly, the corresponding sliding surfaces of

where

where
The controllers for the

From the virtual control inputs (5), it is obtained that



where
Considering the actual situations, such as the limitations imposed by the aircraft structure and the rotor torque during the UAV’s flight, the state variables of the UAV are subject to certain constraints. Thus, the following assumption is made:
To reduce the communication frequency of the UAV controller, an event-triggered mechanism based on a relative threshold is designed. If a fixed threshold is adopted, the controller will remain in a communication state when the control signal is large. By employing a relative threshold strategy, the threshold adaptively changes to ensure the effectiveness of the event-triggered mechanism. When the signal is small, a smaller threshold will result in more precise control. Based on the above analysis, the event-triggered mechanism is designed as follows:

where

Taking the derivative of equation (19) and applying equation (9), it yields:

From the measurement error

According to the Lyapunov stability criterion, the system is stable when

In conclusion, the designed controller and event-triggered conditions can ensure the stability of the controlled system.
Secondly, since
Subsequently, we can derive:

Through the above analysis, it is obtained that the event-triggered mechanisms can avoid the Zeno phenomenon.□
From the DoS attacks discussed above, it is evident that the system controller will experience random packet loss following a Bernoulli distribution. Therefore, it is necessary to design a DoS attack compensation strategy to ensure the safe execution of UAV flight missions. A modification of the position controller is designed as follows:

where

where
Attitude controller design
This section will design an event-triggered attitude subsystem controller with a packet loss compensation strategy in the presence of dual faults and external disturbances.
Define an attitude tracking error as:

Since the control processes for the three angles are similar, we take the roll angle as an example. System (4) can therefore be reformulated in the form of state equations:

where
Then, define a global fast terminal sliding surface as:

where
Taking the derivative of equation (29) and applying equation (27), it yields that:

where
Then, define a general convergence rate as:

where
The expression for the controller can be derived as:

Similarly, for the attitude subsystem controller, it is necessary to design an event-triggered mechanism to reduce communication frequency. Define the measurement error as
The event-triggered mechanism for the roll subsystem is designed as follows:

where

Based on the measurement error, it is noted that

According to the Lyapunov stability criterion, the system is stable when
Based on the above analysis, it is concluded that the designed roll subsystem controller and event-triggered conditions can effectively stabilize the system.
To address the issue of DoS attacks, based on the stability proof process of equation (34), an improved controller is derived. In the event of DoS attacks, a compensation mechanism based on data retransmission is adopted. The improved controller is formulated as:

where

where
When a DoS attack occurs, the data storage unit transfers the stored data from the previous time step to the compensator. If
Similarly, controllers for pitch and yaw angles can be derived. Accordingly, system (27) can be reformulated as the following state equations:
where
Then, define global terminal sliding surfaces as:


where
Then, the corresponding convergence rates are defined as:


where
The controllers


where
The corresponding measurement errors of controllers are defined as

where
In the case of DoS attacks, the corresponding compensation methods are designed as

where


where
Simulation studies
This section performs experiments focused on UAV trajectory tracking. In the simulation studies, the parameters of the UAV model are specified as follows:

3D trajectory.

Position tracking.

Attitude tracking of UAV with injection attacks.

Attitude error.
The simulation results, shown in Figures 3 to 6, confirm that the proposed algorithm exhibits better robustness against injection attacks, partial actuator failures, and bias faults. As shown in Figure 6, the attitude error plot indicates that when

Event-triggered intervals of the designed controllers: (a)
In Figure 7, the horizontal axis represents the instant that the event is triggered, and the vertical axis represents the interval duration. It is found that the total trigger frequency of the controllers is reduced by 29.8%, validating that the event-triggered mechanism effectively reduces the communication frequency of controllers.
The results above show that there are no DoS attacks. When an attack probability is 35% of DoS attacks in both feedback and forward channels as shown in Figure 8, where ‘1’ indicates a moment without an attack, the corresponding performances of the UAS controlled by our designed method with

Attack singles of DoS attacks in both forward and feedback channels.

Attitude tracking of UAV with injection attacks and DoS attacks.
The selection of the parameter
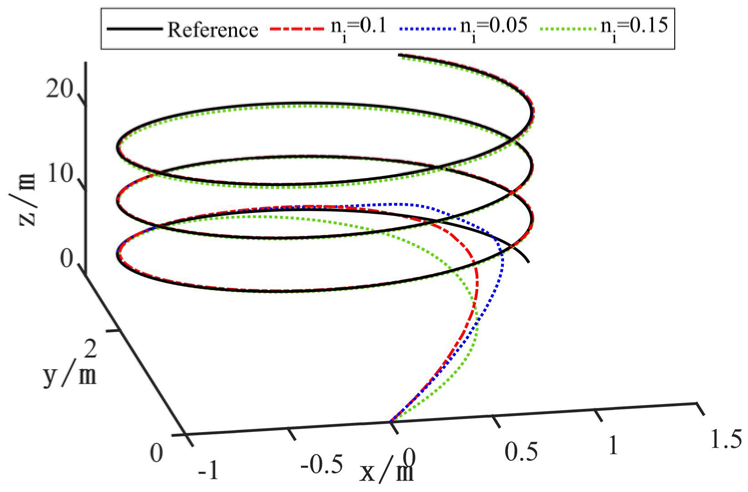
Sensitivities of parameter
To further demonstrate robustness, the flight trajectory is set to a more complex figure-eight shape to verify that the drone can quickly track the predetermined trajectory and fly stably under different complex trajectories, where the intended position trajectory and yaw angle are set as

‘8’-shaped trajectory tracking.
Conclusion
This paper proposed an event-triggered control algorithm based on a global fast terminal sliding mode framework that simultaneously accommodated partial actuator failures, bias faults, and injection attacks on the UAV. Lyapunov analysis rigorously proved closed-loop stability. A compensation mechanism based on data retransmission has also been designed to handle DoS attacks on the UAV. Simulation results demonstrated that the proposed method achieves a faster convergence speed, smaller steady-state errors, and greater robustness against DoS attacks compared to existing methods. Investigating the additional effects of communication delays constitutes a promising avenue for future efforts.
Footnotes
Handling Editor: Chenhui Liang
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Wuxi Young Science and Technology Talent Support Program (TJXD-2024-114), in part by 111 project (B23008), in part by the EU iMARs Project (HORIZON-MSCA-2023-101182996), and in part by the Research Project on Higher Education Teaching Reform in Jiangsu Province (2023JXJG675).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.