
Abstract
The design of an adaptive fuzzy tracking control for a flexible air-breathing hypersonic vehicle with actuator constraints is discussed. Based on functional decomposition methodology, velocity and altitude controllers are designed. Fuzzy logic systems are applied to approximate the lumped uncertainty of each subsystem of air-breathing hypersonic vehicle model. Every controllers contain only one adaptive parameter that needs to be updated online with a minimal-learning-parameter scheme. The back-stepping design is not demanded by converting the altitude subsystem into the normal output-feedback formulation, which predigests the design of a controller. The special contribution is that novel auxiliary systems are developed to compensate both the tracking errors and desired control laws, based on which the explored controller can still provide effective tracking of velocity and altitude commands when the inputs are saturated. Finally, reference trajectory tracking simulation shows the effectiveness of the proposed method in its application to air-breathing hypersonic vehicle control.
Keywords
Introduction
Flexible air-breathing hypersonic vehicles (FAHVs) are crucial because they may represent a more cost-efficient way to make access to space routine or even make the space travel routine and intercontinental travel as easy as intercity travel. 1 –3 A key issue in making hypersonic vehicles feasible and efficient is the flight control design. 4 However, the flight control of FAHV is still an open challenge due to its peculiarity of flight dynamics. It is worth noting that there exists a strong coupling between the propulsive and the aerodynamic forces results from the integration of the scramjet engine, which makes the characteristics of FAHV’s aerodynamics very difficult to be estimated and measured. 5 –7
Recently, lots of efforts have been put into flight control. Linear control theory was widely employed for flight control design based on the linearized model. As shown in the work of Marrison and Stengel, 8 the robust control of FAHV is studied by introducing a linear quadratic regulator (LQR) with stochastic robustness analysis. In the study by Groves, 9 LQR controller is proposed for the linearization model based on any equilibrium points of flight envelope.
Nonlinear control scheme is also employed for FAHV. Back-stepping design approach 10 –14 provides an efficient method to a class of nonlinear systems with mismatched conditions, including flight control systems, which can be converted into a strict-feedback form. The back-stepping design for nonlinear systems consists of a recursive design procedure that breaks down the full system control problem into a sequence of designs for lower order subsystems. However, it is well known that there exists a problem of “explosion of terms” in the traditional back-stepping design, which is caused by the repeated differentiations of virtual control laws. To solve this problem, dynamic surface control 15 is designed by introducing a low-pass filter in each step of back-stepping design.
The fuzzy logic systems (FLSs) 16,17 have been used proverbially to approximate the unknown nonlinear functions because of the better approximation ability, and it is validated that FLSs are very effective methods. Intuitively, it is a promising technique for approximating the dynamic model of FAHV by fuzzy systems and then designing a fuzzy controller for achieving the desirable performances. Recently, some fuzzy control schemes have been proposed for FAHV in the study by Hu et al. 18 and Hu and Liu. 19 Hu et al. 18 have proposed a linear matrix inequality-based approach of designing a fuzzy guaranteed cost output tracking controller for the FAHV. An adaptive fuzzy control strategy based on dynamic surface control is proposed for hypersonic vehicle with uncertain parameters and external disturbances, 19 and the FLSs are used to approximate the uncertainties in the model including uncertain terms and gains.
To reduce the computational load, the minimal-learning-parameter (MLP) scheme 20 is applied to regulate the maximum norm instead of the elements of the ideal weight vectors. In the study by Xu et al., 20,21 the novel design without back stepping is developed to simplify the controller design for flight vehicles with cascade structure.
Considering technical application practice, the actuator fault, 22 input nonlinearity, 23 and saturation 24 are thoroughly considered to ensure the flight safety of the hypersonic vehicle. Especially, the input constraints cannot be ignored in practice since the outputs of actuator are constrained for physical limitations. If it is ignored, the system may suffer from important performance limitations or even lose stability. 25,26 Much literature theoretically focuses on the control problem with input constraints. 27 –31 In practice, when input saturation occurs, the aircraft body may change seriously even disintegrating for the flight control system. So, it is necessary to research the control design problem with input constraints. The anti-windup control is adopted to deal with input constraints, but the stability properties of the closed-loop system cannot be established. 31 In the study by Xu et al., 32 auxiliary systems are constructed to deal with the magnitude constraints on actuators and states. The uniformly ultimately boundedness of that control scheme is guaranteed for the closed-loop system by compensating error and desired control law. However, there are still some problems for input saturation. For example, in the work of Xu et al., 32 only the boundedness of closed-loop system was guaranteed, but the boundedness of tracking errors was not ensured.
Motivated by the results of the previous studies, an adaptive fuzzy tracking control approach is addressed for the longitudinal dynamical model of FAHV with input constraints. Based on the functional decomposition methodology, the longitudinal dynamic model of FAHV is decomposed into two subsystems, including the velocity subsystem and the altitude subsystem. For each subsystem, the fuzzy systems are used to approximate the unknown system uncertainties. In order to decrease computational complexity of the controller, every controllers contain only one adaptive parameter that needs to be updated online. By introducing finite-time convergence high-order differentiator to estimate the newly defined variables, there is no need for the strict-feedback form and virtual controller. Especially, novel auxiliary systems are exploited to cope with the problem of control input constraints. Finally, reference trajectory tracking simulation shows the effectiveness of the proposed method. The main advantages of this article can be summarized as follows: The effect of actuator saturation is successfully eliminated by a novel design of auxiliary error compensation, which guarantees the stability of closed-loop system, as well as the boundedness of velocity and altitude tracking errors even when the actuators are saturated. The proposed strategy is considerably quite simpler than the ones derived from back stepping since there is no need of the complicated design of virtual controller in this article.
The organization of this article is outlined as follows. First, the longitudinal motion model of FAHV is described in section “FAHV model and preliminaries.” Section “Controller design” presents the design procedures of adaptive fuzzy controllers. Then, simulation results are given in section “Simulation.
FAHV model and preliminaries
Longitudinal dynamic model of FAHV
The model taken into consideration in this article is developed by Bolender and Doman 33 for the longitudinal dynamics of FAHV. The flexible effects are included in these equations by modeling the vehicle as a single flexible structure with mass-normalized mode shapes.
Assuming a flat earth and normalizing the span of FAHV to unit depth, the nonlinear motion equations are written as 34

where the rigid body states V, h, γ, θ, and Q represent velocity, altitude, flight-path angle, pitch angle, and pitch rate, respectively; the flexible states

with
where
Control constraints
In practice, due to physical limitations, the outputs of the actuator are constrained. Input constraints studied in the article include the constraints on fuel equivalence ratio and elevator deflection. The constraint on fuel equivalence ratio is imposed by the very nature of the propulsion system, which is required to maintain the conditions that sustain scramjet operation. 35 If the limit is violated, the thermal choking will occur. It could induce that engine unstarts, which could jeopardize mission, vehicle, and its contents. 36 The constraints on elevator deflection and canard deflection are mainly imposed by the limits on control surface displacement. The aforementioned input constraints can be expressed as


where Φmax and Φmin denote the upper and lower bounds of Φ, respectively; δemax and δemin stand for the upper and lower bounds of δe, respectively; Φc and δec are the desired control inputs to be designed in the subsequent section.
High-order differentiator description
A high-order continuous nonlinear differentiator 37 is described as

where xi are the states of differentiator and they represent the estimations of υ,
The high-order differentiator can reduce the chattering phenomenon sufficiently more than the high-order sliding mode differentiator. 38 Moreover, this differentiator is a generalization of high-order sliding mode differentiator and linear high-gain differentiator, and the parameters regulation is easier. 37
Description of FLSs
FLSs consist of four parts: the knowledge base, the fuzzifier, the fuzzy inference engine working on fuzzy rules, and the defuzzifier. The knowledge base for FLSs comprises a collection of fuzzy if-then rules of the following form: Rl: If x1 is
Through singleton fuzzifier, center average defuzzification, and product inference, the FLSs can be proposed as

where

Denoting

Lemma 1
Let

Controller design
The control objective pursued in this section is to develop an adaptive fuzzy controller for FAHV to provide a robust tracking of velocity and altitude commands Vref and href. It is assumed that the rigid body states V, h, γ, α, and Q are available for measurement. It is easy to note that the velocity V is mainly related to Φ and the altitude h is mainly affected by δe since the thrust T affects V and δe has a dominant contribution to h change in equation (1).
Control design for velocity subsystem
The velocity subsystem can be rewritten as the following formulation

where

uV is the control input, yV means the output signal, and FV is an unknown function that is approached by the fuzzy system. The control goal of velocity subsystem is to make V track its command Vref by exploring a fuzzy controller Φ.
The velocity track error is defined as

The time derivative of equation (10) is given by

To eliminate the saturation effect on Φ, a novel auxiliary system is introduced to deal with the saturation effect

where k0 is positive constants to be designed.
Define

Differentiating ZV with respect to time and invoking equations (11) and (12), we obtain

Based on the FLSs, the estimations of FV can be designed as

The optimal parameter vectors

where Ω and R2 are bounded compact sets for
The unknown nonlinear function is defined as FV, which can be approximated as

where
In order to decrease the computational complexity of the controller, the MLP technology 39 is introduced to reduce the computational load of FLSs. We first define a constant as follows

then we can use the MLP technology to estimate ϑV instead of
With the dynamic inversion theory, the desired controller Φc is introduced as

where

where cV is a positive design parameter.
Theorem 1
Consider the closed-loop system consisting of plant (9) with auxiliary system (12), controller (19), and adaptive law (20). Then, all the signals involved in equation (22) are semi-globally uniformly bounded.
Proof
Substituting equations (17) and (19) into equation (14) leads to

Define the estimation error

Taking time derivative along equation (22) and using equations (20) and (21)

Since

Thus, equation (23) can be rewritten as


Define the following compact sets

If ZV is outside the compact set and
Theorem 2
Consider the auxiliary systems (12). Then the introduced states χV are bounded and can converge to zero in finite time.
Proof
Choose the following Lyapunov function candidate

Define a positive constant DΦ that satisfies

If
Invoking Theorem 1, Theorem 2, and equation (13), it is obvious that the tracking error
Control design for altitude subsystem
The control objective pursued in the altitude subsystem is to design a fuzzy-based output-feedback controller δe to let h track its reference trajectory href.
Defining

the command of γ is proposed as
Letting
The remainder of altitude subsystem is rewritten as
where


uh is the control input and z2 represents the output signal.
Define

So, the time derivative of z2 is considered as

Letting

where
Thus, equation (31) can be rewritten as the following output-feedback formulation

With the foregoing analysis, different from the conventional back-steeping control design process, there is only one unknown function Fh that needs to be approximated by fuzzy system. Simultaneously,, the “explosion of terms” problem also can be avoided. The new states z2 and z3 can be estimated by high-order differentiator.
Define the tracking error


where μ is a positive constant to be chosen.
The time derivative of R can be expressed as

Since

Combining equations (38) and (39), we have the expression as follows

Noticing the fact that δe is constrained, we explore the following additional system by introducing three new variables χ1, χ2, and χ3
where k1, k2, and k3 are positive constants to be designed.
Define


Since
The time derivative of Zh is formulated as

Let γ and γd as the input signals of the high-order differentiator, we easily get the
The estimation errors are defined as

From the discussion in the work of Wang and Bijan,
37
it is easy to conclude that there exist positive constants
Then, equations (44) and (45) can be rewritten as


Similarly, the optimal parameter vectors

where Ω and R2 are bounded compact sets for
The unknown nonlinear function is defined as Fh, which can be approximated as

where
Based on the MLP technology,
39
a constant
The desired controller δec is deduced as

where

where ch is a positive design parameter.
Theorem 3
Consider the closed-loop system consisting of plant (35) with auxiliary system (41), controller (51), and adaptive law (52). Then all the signals involved in equation (54) are semi-globally uniformly bounded.
Proof
Define the estimation error

Design the following Lyapunov function candidate

Taking time derivative along equation (54) and using equations (52) and (53)

Since

Thus, equation (55) can be rewritten as
where

Define the following compact sets

If
Theorem 4
When the actuator δe is saturated, the auxiliary system (41) is still globally asymptotically stable, and the proposed altitude controller enables the altitude to track its command with bounded tracking error.
Proof
Combining equations (43) to (48), we have the expression as follows

Thus, Zh is bounded since
Then, a Lyapunov function can be chosen in a sufficiently small domain near the trim point (0, 0,

In the chosen sufficiently small domain, it is supposed that
Define a positive constant

If
Invoking Theorem 3, Theorem 4, and equation (42), it is obvious that the tracking error
Simulation
In this section, simulations on a vehicle are departed into two parts to verify the effectiveness of the proposed control scheme (19), (30), and (51). The aerodynamic coefficients and model parameters of the utilized dynamic model are referred from the literature.
34
The initial values of the states are set as listed in Table 1. The natural frequencies and damping ratios for the flexible state are worked out as follows:
Initial trim conditions.

The reference commands of altitude and velocity steps are generated by the filter


The parameters for the controller are selected as
According to equation (4), the fourth-order differentiator is designed as

where
Let

Scenario 1
In this scenario, the altitude tracks a square command with a period of 200 s and magnitude ± 700 ft. To show the effectiveness of the proposed novel auxiliary systems, the following three cases are considered. Case 1. The actuator saturations are supposed as Case 2. The actuator saturations are supposed as Case 3. The actuator saturations are supposed as
The simulation results of cases 1 and 2 are shown in Figures 1 to 5. From Figure 1, we can see that the χV and χ1 of auxiliary systems can duly compensate the actuator saturation, which indicates that the introduced auxiliary systems can commendably provide error compensation on the desired controllers. As shown in Figures 2 and 3, the velocity and altitude can track their commands timely and with bounded tracking errors when the limitations on actuators are in effect. However, the tracking error during the transient in case 2 is less than that of case 1. This is due to the saturation of Φ and δe. The simulation results in Figures 4 and 5 confirm that the rigid/flexible states converge to the desired trim conditions in a short time. Thus, the designed control method has a good performance on disposing input constraints.

Control inputs.

Velocity tracking and tracking error.

Altitude tracking and tracking error.

Flight-path angle, pitch angle, and pitch rate.

The flexible states.
Figures 6– to 8 show the results of case 3. Since auxiliary systems (12) and (41) are eliminated, the strategy cannot tackle the control inputs constraints anymore. The velocity and altitude also can’t track their reference trajectory.

Control inputs (case 3).
Velocity tracking and tracking error (case 3).

Altitude tracking and tracking error (case 3).
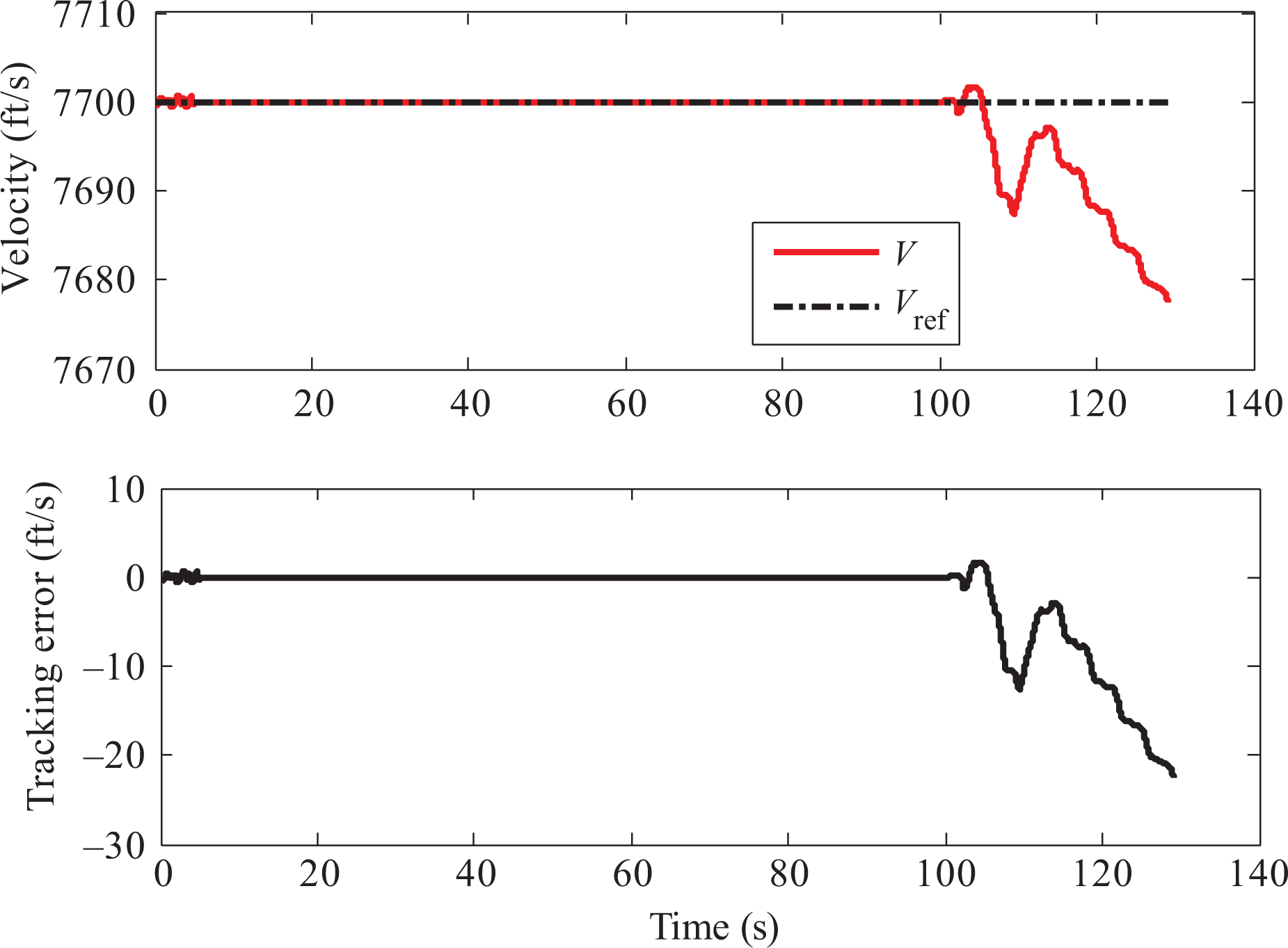
Scenario 2
In this scenario, the altitude controller tracks the step change with magnitude 2000 ft, while the velocity steps from 7700 ft/s to 8200 ft/s. The actuator saturations are supposed as
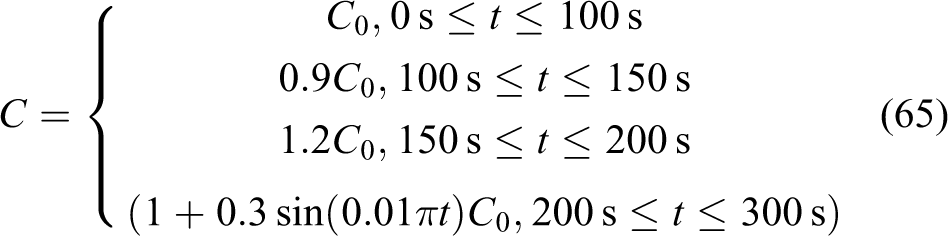
where C0 is aerodynamic coefficient’s nominal value.
The simulation results are illustrated in Figures 9 to 11. It can be seen from Figures 9 and 10 that the velocity and altitude can track their commands timely and without any steady tracking errors under aerodynamic coefficient perturbation. Time responses to control inputs change are presented in Figure 8. It can be seen from Figure 8(a) that the saturation occurs in fuel equivalence ratio during simulation, but the controller still provides a good track characteristic according to Figures 9 and 10.

Velocity tracking and tracking error.

Altitude tracking and tracking error.

Control inputs.
Conclusions
For a nonlinear model of FAHV, an adaptive fuzzy tracking control approach is addressed for the longitudinal dynamical model of FAHV with input constraints. The longitudinal dynamic model of FAHV is decomposed into two subsystems including the velocity subsystem and the altitude subsystem. For each subsystem, the FLSs are designed to approximate the unknown system nonlinearity, which needs less knowledge of dynamic model. To alleviate computational burden of the controller, the MLP is introduced to decrease the amount of adaptive parameters that needs to be updated online. By introducing finite-time convergence high-order differentiator to estimate the newly defined variables, the design of controller is predigested. Furthermore, novel auxiliary systems are constructed to eliminate the saturation effect. A comprehensive Lyapunov-based stability analysis is provided to show that the control design achieves ultimate boundedness tracking for FAHV. Simulation results demonstrate that the proposed control strategy can provide satisfactory velocity and altitude tracking performance with input constraints and external disturbance.
Footnotes
Acknowledgments
The authors would like to greatly appreciate editor and all anonymous reviewers for their comments, which help to improve the quality of this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Aeronautical Science Foundation of China (grant no 20120916006).