
Abstract
A whole resolved motion rate control algorithm designed for mobile dual-arm redundant robots is presented in this article. Based on this algorithm, the end-effector movements of the dual arms of the mobile dual-arm redundant robot can be decomposed into the movements of the two driving wheels of the differential driving platform and the movements of the dual-arm each joint of this robot harmoniously. The influence of the redundancies of the single- and dual-arm robots on the operation based on the fixed- and differential-driving platforms, which are then based on the whole resolved motion rate control algorithm, is studied after building their motion models. Some comparisons are made to show the advantages of this algorithm on the entire modeling of the complicated robotic system and the influences of the redundancy. First, the comparison of the simulation results between the fixed single-arm robot and the mobile single-arm robot is presented. Second, a comparison of the simulation results between the mobile single-arm robot and the mobile dual-arm robots is shown. Compared with the mobile single-arm robot and the fixed dual-arm robot based on this algorithm, the mobile dual-arm robot has more redundancy and can simultaneously track and operate different objects. Moreover, the mobile dual-arm redundant robot has better smoothness, more flexibility, larger operational space, and more harmonious cooperation between the two arms and the differential driving platform during the entire mobile operational process.
Keywords
Introduction
In recent years, the research direction of the mobile single-arm redundant robot and the mobile dual-arm redundant robot has been paid an increasing amount of attention.
First, the mobile single-arm robot was studied. Specifically, single-arm operation was studied without considering platform control. 1 –3 Kai Liu and Frank L Lewis considered the arm and robot platform, respectively. 4 Some scholars only examined the fixed industrial manipulator. 5 Changan Liu and Hong Zhou 6 did not prove the superiority of the mobile manipulator compared with the 2-D fixed manipulator of the resolved motion rate control. An optimization rule function to solve the problem of the time-consuming computing method of the redundancy degree of freedom (DOF) was proposed in references. 7,8 In addition, the resolved motion rate control algorithm of the mobile arm end movement, which can be decomposed into each joint movement by inverse kinematics equations and can significantly simplify the request of movement operation sequence for the accomplishment of a specific task, was suggested in reference. 9 However, the mobile single-arm redundant robot cannot fulfill real-life requirements.
Second, academic works on the mobile dual-arm redundant robot were paid much attention. Based on the analysis of the motion relation of the mobile dual-arm robot, the kinematics model, which integrates the geometry method and the analytical method, was used in a special humanoid dual-arm robot. According to the positive solutions and the inverse solutions on the kinematics of the humanoid dual arm, the transformation matrix between the mobile robot and the arm was simultaneously given. 10 Moreover, a manipulation planning method for both arms of a virtual human was proposed for product assembly and maintenance motion simulation under a complex virtual environment; this method was based on a goal-oriented heuristic rapidly exploring random tree (RRT) algorithm with dual balance expansion and combined with the rapid arm inverse kinematical method. 11 The trajectory planning for the dual-arm robot and the adopted dual-arm J+-RRT to grasp a plate without an inverse kinematical equation was studied. 12 Zhang and Ouyang 13 focused on the path planning of a dual-robot-coordinated couple motion and proposed replacing the tool coordinate system of the slave robot for offline slave robot path generation. In consideration of parameter variation and load disturbance, the obstacle avoidance of the fixed manipulator based on the resolved motion rate control (RMRC) and the construction of appropriate obstacle avoidance potential functions with the calculation method of obstacles were studied to improve the links and simplify the obstacle avoidance constraints. 14 Moreover, the simulation of the robot tracking different trajectories and avoiding static and dynamic obstacles in the operational space proved the efficiency of this method. However, these studies lack information on the entire modeling of the mobile dual-arm redundant robot and on the redundancy comparisons.
Considering the drawbacks of the previous studies, we propose a whole RMRC (wRMRC) algorithm that can decompose the end-effector movements of the dual arms of the mobile dual-arm redundant robot into the movements of the two wheels of the differential driving platform and the movements of each joint of the dual arm. The advantages of this method are as follows. (1) The entire modeling of the differential driving platform and the fixed dual-arm robot based on the wRMRC algorithm with the generalized Jacobian matrix (GJM) makes the motion planning of the mobile dual-arm redundant robot easier and simpler. (2) This method can be easily realized by currently available fixed dual-arm robots and differential driving platforms. (3) This method intuitively shows the advantages of the mobile dual-arm redundant robot over the mobile single-arm redundant robot and the fixed dual-arm redundant robot in expanding the operational space, enhancing the coordination operation function and improving flexibility.
The remainder of this article is organized as follows. Section “Building an entire model on the mobile dual-arm redundant robot” introduces how to build a whole model on the differential driving platform and the dual arm in stages using RMRC. The specific realization of the wRMRC algorithm of the mobile dual-arm robot is given in section “Realization of the wRMRC algorithm”. The simulations are summarized in section “Simulations and results”. The conclusions and discussions are presented in section “Conclusions and discussion”.
Building an entire model on the mobile dual-arm redundant robot
Motion model of the differential driving platform
The differential driving platform, as shown in Figure 1(a), is produced by the Sichuan HangFa Company (Chengdou, China). Its motion model is presented in Figure 1(b).

(a) Differential driving platform; (b) motion model of the differential driving platform.
The transformation from

where
Motion model of the fixed single-arm robot
The motion model of the fixed single-arm robot is shown in Figure 2, where
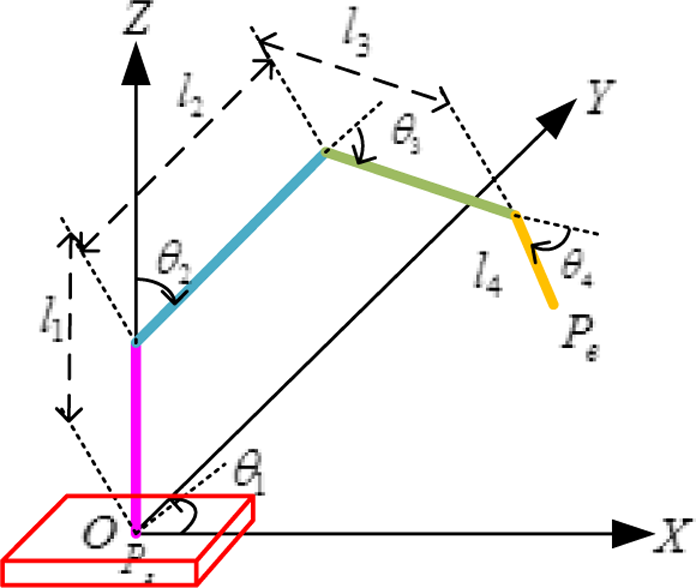
Motion model of the fixed single-arm robot.
The end-effector velocity of the fixed single-arm robot is calculated by


The transformation from


where
Motion model of the mobile single-arm redundant robot
The motion model of the mobile single-arm robot is shown in Figure 3, where

Motion model of the mobile single-arm redundant robot.
The end-effector velocity of the mobile single-arm robot is calculated by


The transformation from


where
The motion model of the mobile single-arm redundant robot can be derived by equations (11) and (1)


where
Unlike in equation (5), the number of the DOF increases from four to six because of the addition of the differential driving platform based on the fixed single-arm robot, as shown in equation (13). The end-effector velocity of this robot is also associated with the angular velocities of the two driving wheels of the platform.
Motion model of the fixed dual-arm redundant robot
The fixed dual-arm robot with seven DOF per arm produced by the Rethink Company is a flexible research platform. Its software is based on the ROS framework for seamless integration across platforms, and it has various sensors, including a 360° sonar and a front camera for custom sensing applications, torque, position, and velocity sensing on each joint. The front cameras on the head are integrated with the one on each wrist for visualizing the end-effector interactions and the end-effector specification for designing custom intelligent hands. To improve the entire performance of the mobile dual-arm robot, we plan to install a binocular vision system and a laser sensor, which are both used for distance measuring and environment modeling. As the seventh joint of this robot is rotary, an entire motion model of the fixed dual-arm robot with six DOF per arm is built with the seventh joint omitted, as shown in Figure 4(a), where the definition of

(a) The fixed dual-arm robot with seven DOF per arm; (b) motion model of the fixed dual-arm robot. DOF: degree of freedom.
The left-arm end-effector velocity of the fixed dual-arm robot is calculated by



As mentioned in section “Motion model of the mobile single-arm redundant robot,” the transformation from


where
Similarly, the right-arm end-effector velocity of the fixed dual-arm robot is calculated by



The transformation from


where
Motion model of the mobile dual-arm redundant robot
The combination of the motion model of the differential driving platform, which is shown in Figure 1(b), with the motion model of the fixed dual-arm robot, which is shown in Figure 4(b), comprises the entire motion model of the mobile dual-arm robot, as shown in Figure 5, where the definitions of
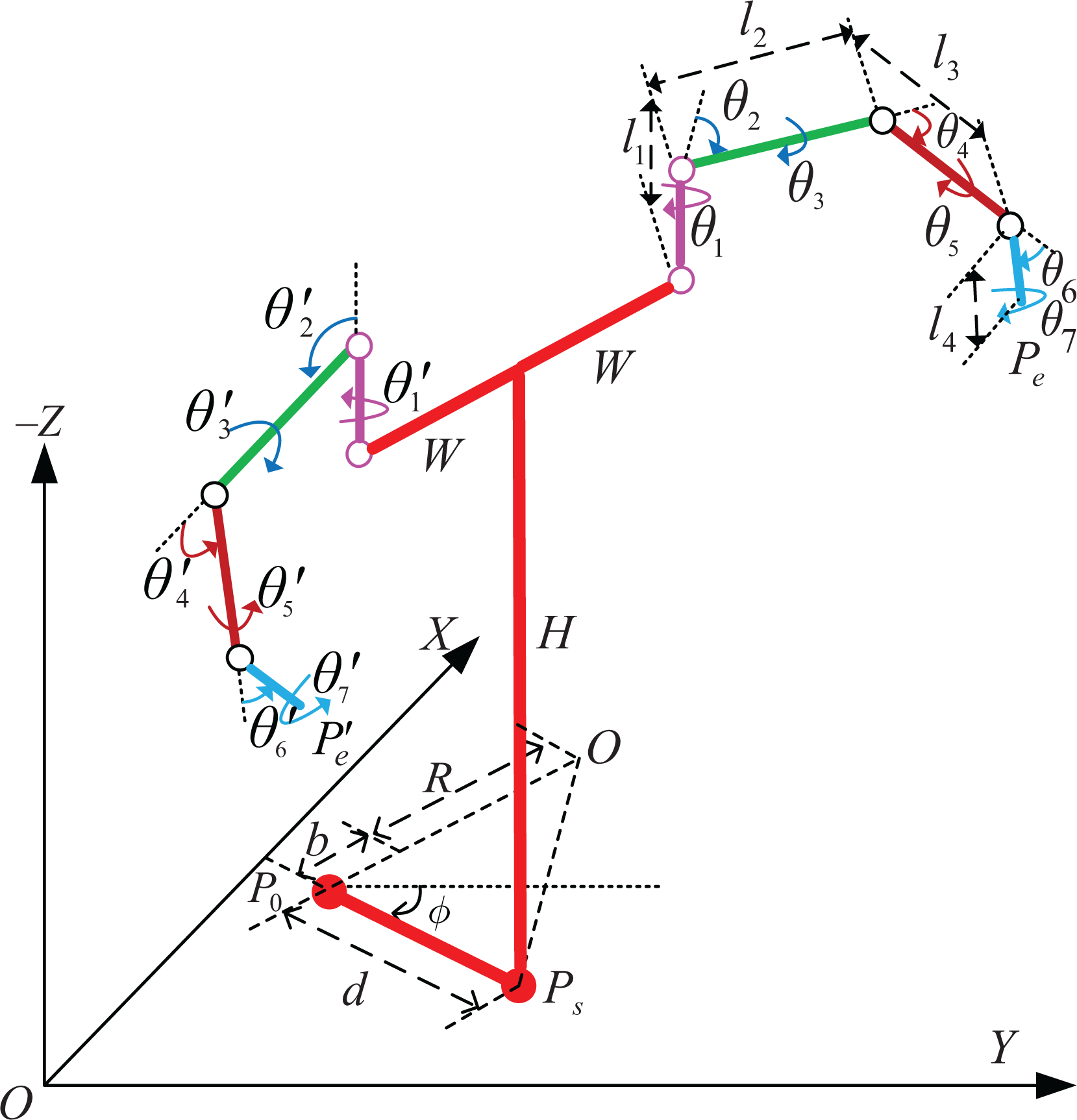
Motion model of the mobile dual-arm robot with seven DOF per arm. DOF: degree of freedom.
The end-effector velocity of the left arm of the mobile dual-arm robot is calculated by



Similarly, the transformation from


where
The motion model of the left arm of the mobile dual-arm redundant robot can be derived using equations (28) and (1)


where
Unlike in equation (17), the DOF increases from six to eight, as shown in equation (29), because of the addition of the differential driving platform based on the fixed dual-arm robot.
The right arm’s end-effector velocity of the mobile dual-arm robot is calculated by


The transformation from


where
Similarly, the motion model of the right arm of the mobile dual-arm redundant robot can be derived using equations (35) and (1) as follows

where
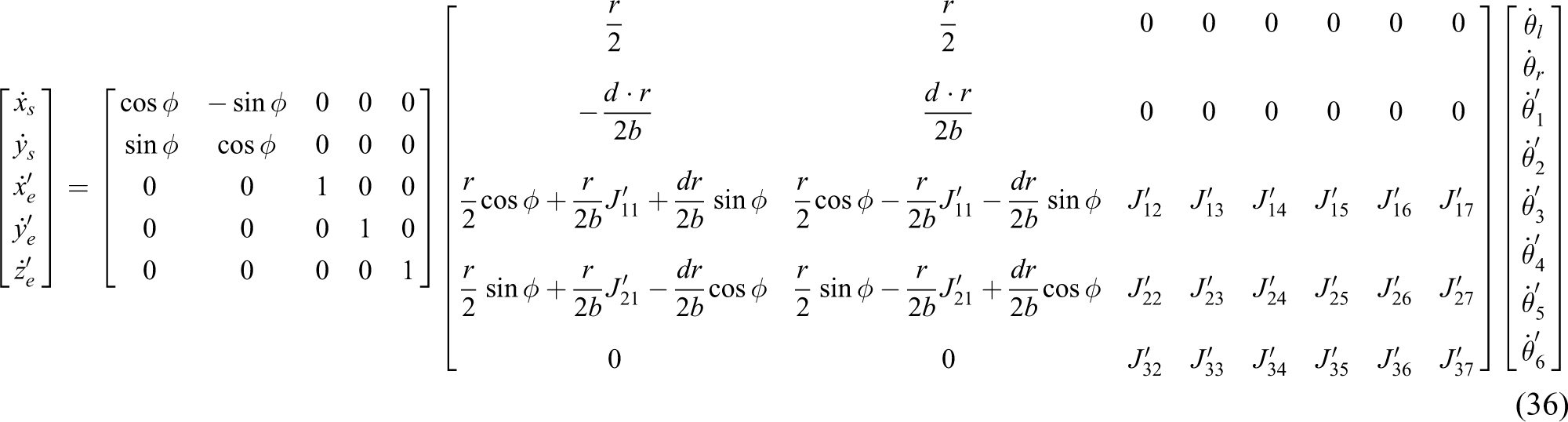
After modeling the platform, the left arm, and the right arm, the entire motion model of the mobile dual-arm robot can be achieved using wRMRC algorithm. The advantage of this method is that the movements of the dual-arm end effectors of the mobile dual-arm robot can intuitively be decomposed into the movements of the two driving wheels of the differential driving platform and the movements of each joint of the dual arm. The transformation from


where
Realization of the wRMRC algorithm
As mentioned previously, the position relationship between

where
Clearly, the derivative of equation (40) is equation (39), and the inverse of equation (39) is equation (41) as follows

where
For the simulation, equation (41) is described in the form of the variation per unit time as follows

where
The specific processes in the simulation are listed as follows:
Step 1: Input the initial configuration of the mobile dual-arm redundant robot including the differential driving platform and the dual arms;
Step 2: Input the different trajectories of the dual-arm end effectors of the mobile dual-arm robot;
Step 3: As the unit time
Step 4:
Step 5: According to the value of
Step 6: The next motion status of the mobile dual-arm robot is confirmed. If the number of whole steps is less than N, the program will go to Step 4; otherwise, it will go to Step 7;
Step 7: End algorithm.
Simulations and results
To verify the validity of this algorithm and the influence of redundancy on the operation of the single- and dual-arm robots on the basis of the fixed platform and the differential driving platform, some simulations are made. First, we simulate the movement operations both on the fixed single-arm robot and the mobile single-arm robot. It is shown that the mobile single-arm robot has better smoothness, more flexibility, and greater operational space with more redundancy during the whole operational process. Second, by the simulation comparison between the movement operations of the single-arm robot and the dual-arm robot, the mobile dual-arm robot shows better cooperating performance during the whole operational process.
Simulation of the fixed single-arm robot with four DOF
The trajectory of the execution point
The parameters of the fixed single-arm robot are set as follows

The initial configuration of the fixed single-arm robot is set as follows

The numerical simulations are as follows:
Duo to the absence of the differential driving platform, the operating space of the fixed single-arm robot becomes narrow and can lead to the inability to completely track the target, as shown in Figure 6(a). When the value of the sampling point is 180, the mutation of the every joint angular variations is caused by the absence of the differential driving platform and the restriction of the total arm length of the fixed single-arm robot as shown in Figure 6(b).

(a) Movement simulation in 3-D; (b) Four joint angular variations of the four DOF fixed single-arm robot. DOF: degree of freedom.
Simulation of the mobile single-arm redundant robot
The trajectory of the execution point is the same with the one of the execution point in section “Simulation of the fixed single-arm robot with Four DOF.” The trajectory of the fixed intersection point

The parameters of the differential driving platform and the single-arm robot are set as follows

The initial configuration of the mobile single-arm redundant robot is set as follows

The numerical simulations are as follows:
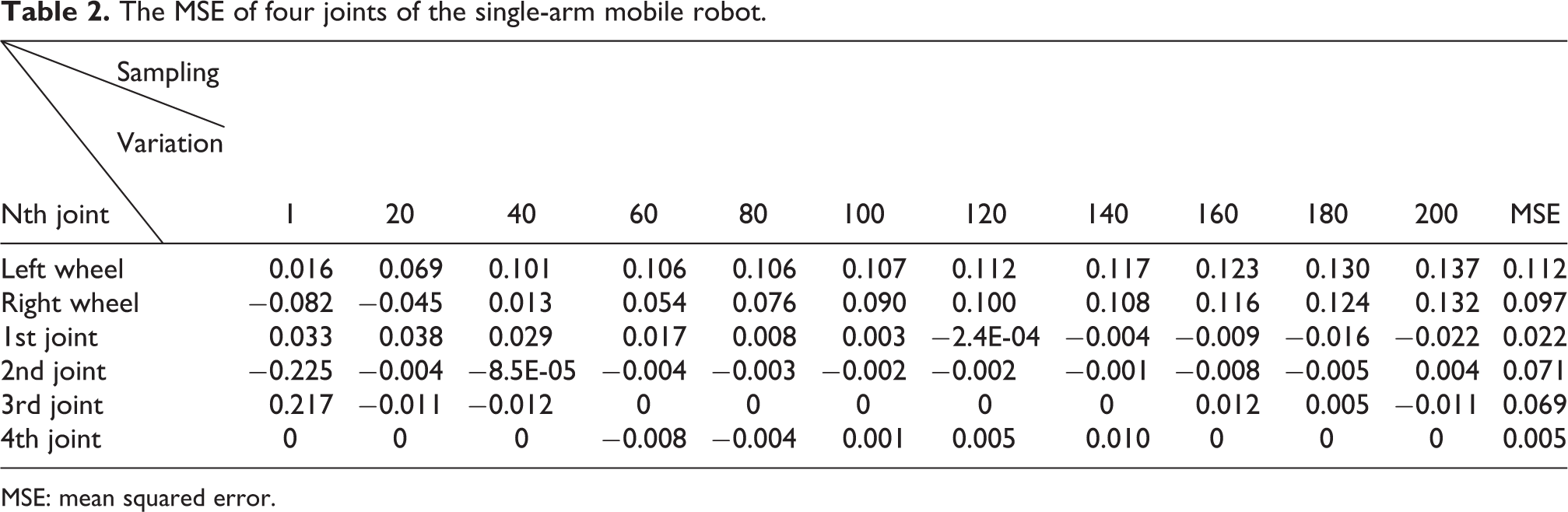
By adding the differential driving platform on the basis of the fixed single-arm robot, the number of the DOF increases from four to six. Thus, compared with Figure 6(a), Figure 7(a) and (b) shows that the operational space of the mobile single-arm redundant robot is expanded and this robot is completely able to track the target. The comparative study on the value of mean squared error (MSE) of each joint between the fixed and mobile robot illustrates that the angular variation of each joint of the mobile robot is smoother than that of the fixed single-arm robot shown in Table 1 and Table 2 in the whole sampling points.
The MSE of four joints of the single-arm fixed robot.a

MSE: mean squared error.
a♦—no function of tracking.

(a) Movement simulation in the x and y plane; (b) movement simulation in 3-D; (c) left-wheel, right-wheel, and four joint angular variations of the mobile single-arm redundant robot.
The MSE of four joints of the single-arm mobile robot.
MSE: mean squared error.
Mobile operating simulation of the mobile single-arm redundant robot
All initial configurations of the simulation including the trajectories of
The numerical simulations are as follows:
Figure 8(a) and (b) illustrates the movement simulation of the end-effector operation on the static object A of the mobile single-arm redundant robot. As shown in Figure 8(c), though the green lines fluctuate heavily during the process of the operation on the static object A, the mobile single-arm redundant robot features as completely tracking and operating on the target when moving. Therefore, more redundancy means more flexibility and greater operation for the mobile single-arm robot.
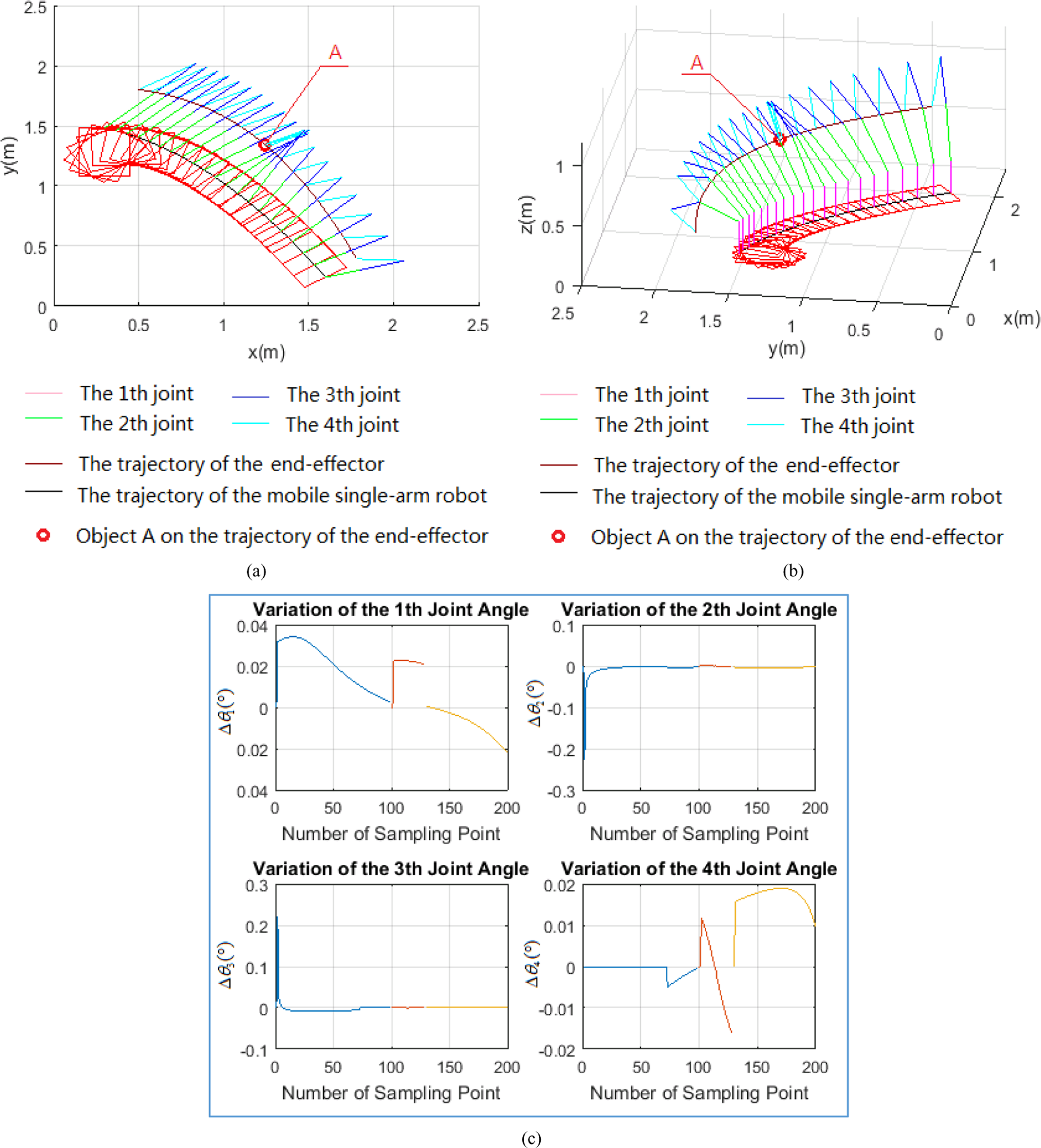
(a) Simulation of the mobile operating on the static object A in the x and y plane; (b) simulation in 3-D; (c) four joint angular variations of the mobile single-arm redundant robot.
Simulation of tracking the same target of the dual arms
The tracking trajectories of

The dual-arm parameters of this robot are the same and are set to the following

The left-arm and right-arm initial configurations of this robot are, respectively, set to the following

The trajectory of
The parameters of the differential driving platform are

The numerical simulations are as follows:
Compared with Figure 7(a) and (b), Figure 9(a) and (b) demonstrates that the mobile dual-arm redundant robot can harmoniously track the same target and has collaboration capability. Furthermore, Figure 9(c) and (d) illustrates that the angular variations of the left-arm and right-arm of each joint of this robot are smoother than those of the mobile single-arm robot in the entire sampling points.

(a) Tracking simulation on the same target of the dual arms of the mobile dual-arm robot in the x and y planes; (b) simulation of tracking the same target in 3-D; (c) six joint angular variations of the left arm; (d) six joint angular variations of the robot.
Simulation of tracking different targets of the dual arms
The trajectories of

The parameters of the dual-arm and the differential driving platforms including the initial configurations of the dual-arm are the same as the corresponding ones in section “Simulation of tracking the same target of the dual arms.”
The numerical simulations are as follows:
In section “Simulation of tracking the same target of the dual arms” and in this section, the number of the DOF of the mobile dual-arm robot increases from 14 to 16 because of the addition of the differential driving platform based on the fixed dual-arm robot. Therefore, as the operational space is significantly expanded, this robot not only can completely track the same target shown in Figure 9(a) and (b) but also can completely track different targets simultaneously. The robot also has harmonious cooperation between the two arms and between the arms and the differential driving platform, as shown in Figure 10(a) and (b). Furthermore, the comparison analysis between this robot and other robots shows that the angular variation of each joint of the dual arms is minute, as shown in Figure 10(c) and (d). The movement of each joint of this robot has better smoothness than that of other robots in all sampling points.

(a) Tracking simulation on the different targets of the dual arms of the mobile dual-arm robot in the x and y planes; (b) movement simulation in 3-D; (c) six joint angular variations of the left arm; (d) six joint angular variations of the right arm of the mobile dual-arm redundant robot.
Mobile operating simulation of the dual arms of the robot
A simulation was conducted to verify the manipulability of the mobile dual-arm redundant robot on different targets. Object A is an operation point on the end-effector trajectory of the left arm, and object B is an operation point on the end-effector trajectory of the right arm. All initial configurations of the simulation including the trajectories of
The numerical simulations are as follows:
The movement simulations are shown in Figure 11(a) and (b). Figure 11(c) and (d) shows that although the green lines fluctuate heavily during the operation on the static objects A and B separately, the mobile dual-arm redundant robot can operate on the different objects and coordinate the two arms and the differential driving platform when moving. Therefore, more redundancy shows the advantages of expanding the operational space, enhances the coordination operation function, and improves flexibility.

(a) Simulation of the mobile robot operating on static object A for the left arm and on static object B for the right arm in the x and y planes; (b) movement simulation in 3-D; (c) six joint angular variations of the left arm; (d) six joint angular variations of the right arm of the mobile dual-arm redundant robot.
Conclusions and discussion
If applying the RMRC algorithm to model the left arm and the mobile platform of and the right arm and the mobile platform of the redundant mobile dual-arm robot separately, we can also get the same results. The advantage of the method is that it can directorially decompose the end-effector movements of the dual arms of the mobile dual-arm redundant robot into the movements of the two driving wheels of the differential driving platform and each joint of the dual arms of the robot harmonically, which makes the motion planning of the mobile dual-arm redundant robot easier and simpler. Through the modeling based on the wRMRC algorithm, it intuitively demonstrates that more redundancy leads to better smoothness, more flexibility and greater operational space, and the harmonious cooperation during the whole mobile operational process. In this study, we make two comparison simulations based on the wRMRC algorithm. The first comparison simulation is made between the fixed single-arm robot and the mobile single-arm robot. The second comparison simulation is made between the mobile single-arm robot and the mobile dual-arm robot. According to these simulations, the mobile dual-arm redundant robot can completely track and operate different objects and can cooperate harmoniously when moving. According to the comparative study of the MSE of each joint between Table 1 and Table 2, the mobile robot with redundancy shows better smoothness and more flexibility. In a word, the modeling based on the wRMRC algorithm clearly demonstrates the advantages of better smoothness, more flexibility, larger operational space, and more harmonious cooperation during the entire mobile operational process of the mobile dual-arm robot with more redundancy. In future works, the proposed algorithm will be applied and optimized in further experiments including the study of the singularity and dynamics about the redundant mobile dual-arm robots.
Footnotes
Author’s note
Author Hongxing Wang is also affiliated to Nanchang Institute of Technology, Nanchang, Jiangxi Province, China.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was separately supported by the National Natural Science Foundation of China under grant no. 61273339, the Self-Planned Task (SKLRS201609B) of State Key Laboratory of Robotics and System (HIT), Science and Technology Planning Project of Jiangxi Province (20161BBH80040) and the Science and Technology Project Affiliated to the Education Department of Jiangxi Province (GJJ14745).