
Abstract
To provide timely and appropriate assistance, robots must have the capability of proactively understanding a user’s personal needs, the so-called human intention inference. In human–human interaction, humans have a natural and implicit way to infer others’ intentions by selecting correlated context features and interpreting these features based on their life experience. However, robots do not have this capability and it is not realistic to build an explicit formula to associate human intentions with context. In this article, a novel fuzzy context-specific intention inference method is developed for human-like implicit human intention inference. With a fuzzy manner, context features are converted into discrete context statuses, which are similar to human subjective feelings. An intention-centered common sense database is developed consisting of correlated fuzzy context statuses, object affordances, and their relationship with human intentions. With this database, a Fuzzy Naïve Bayesian Network algorithm is adopted for implicit intention inference. Home scenario results validated the fuzzy context-specific intention inference methods reliability and lab scenario results validated the fuzzy context-specific intention inference methods effectiveness and robustness. This work is expected to develop intuitive and effective human–robot interaction, consequently enhancing the adoption of assistive technologies and improving the independence of the disabled and elderly in activities of daily living.
Keywords
Introduction
Robotic elderly caregiving
The population aging trend currently is widespread across the world.1.2 A large fraction of the elderly population is suffering from different degrees of physical impairments. 3 At the same time, the whole society is encountering a shortage of caregivers. 2 Given this situation, assistance robots that help the elderly with activities of daily living (ADLs) have been introduced to improve the elderly’s quality of life. 4,5,6 Typical applications include navigation robots, 7 rehabilitation robots, 1,8 and smart reminders. 9,10
Robotic caregiving requires robots to be sufficiently intelligent in order to implicitly and naturally understand a user’s intentions with minimal human physical involvements. 3,7,11,12 By implicitly and naturally understanding human intentions, a robot could proactively and timely assist a user with his individual needs, which will improve the effectiveness and acceptance of human–robot interaction (HRI). 11,13,14 Research about human intention inference occurs mainly in two categories: action-specific intention inference and context-specific intention inference. Action-specific intention inference uses human activity/action patterns to infer human intentions including situation-assisted human intention inference, 15,16 online human utility-based human intention inference, 17,18 and hierarchical action modeling human intention inference 19,20 Context-specific intention inference involves context to assist human intention inference including environment-based most-desired intention identification, 21,22 context-assisted potential intention generation, 23,24 and spatial constraint intention inference 25,26
Context-specific intention inference
Using context in human intention inference has several advantages. First, to conduct a natural and reliable human intention inference, context-specific intention inference exploits the valuable intention-related information embedded in the surrounding environment thus increasing inference reliability. 1,23,25 Second, the involvement of context simplifies inference procedures. 27 Third, context-specific intention inference is an effortless, natural, and intuitive way for the elderly with severe motion disability to interact with assistive robots.1.3 It is unrealistic for this user group to create explicit action inputs. 28 Thus, human involvement should be minimized. Ideally, human intention inference should be performed implicitly based on existing clues. This creates a strong need for a robot to maximally and effectively exploit the useful information from the surrounding environment.
Although context-specific intention inference has those advantages, its implementation is still a long way to go. First, a human’s subjective feelings toward context are ignored. 29,30 For example, an individual feels “comfortable” with a temperature between 19°C and 28°C and feels “hot” above 26°C. The overlapping temperature range 26–28°C, which is subjectively considered as both comfortable and hot in some degree, is often simply classified as either hot or comfortable. Second, environmental measurements are continuous, not discrete. It is unrealistic to build an explicit formula for human intentions with continuous measurements. Last, context information is useful yet redundant. It is hard to get a trade-off between exploitation of useful information and elimination of redundant information. 31 . 32
Some efforts have been made to partially address the context information processing problem in intention inference. Thresholds have been set for distinguishing context feature statuses. Only when the value was over the fixed thresholds would some statuses be considered in intention inference processes. 33 Statuses have been predefined and were compared with the measured context values to determine the current status as relatively high/normal/low. 34 In study by Nakano et al. and Hong et al., 35,36 context features were simplified by discarding “unnecessary context.” Both the threshold method and the discarding method filtered out some useful information hiding in the context values near the thresholds or in the discarded context. In addition, the contributions of context values over the thresholds were not processed discriminately. Furthermore, the threshold method discarded the fact that a person’s feelings toward context features related to an intention are subjective and there should be overlapping between context statuses.
In this article, we propose a novel fuzzy context-specific intention inference (FCII) method to implicitly infer human intentions in ADL using fuzzy context statuses. This method could naturally and effectively exploit intention-related information embedded in the daily environment. Combined with a fuzzy context processing method and the common sense knowledge extracted from daily life experience, the intention-related context features are selected and the fuzzy context–intention correlations are established. Then based on a Fuzzy Naïve Bayesian network (FNBN) algorithm, the most likely human intention is inferred.
Our main contributions in this article are as follows: (1) Context feature statuses are defined in a fuzzy way to reflect the subjective nature of human perception to the surroundings. In addition, this fuzzy way allows the full range of a context feature to be considered and the contributions of different statuses for this context feature can be treated discriminately. (2) Based on a FNBN algorithm, fuzzy context–intention correlations are established to perform reliable intention inference in ADLs. (3) It allows a robot to infer a human’s intentions based on object affordances and other context features, which is more implicit and better exploits the intention-related context information compared with other intention inference methods. 19,37 In our method as shown in Figure 1, we generate a set of potential intentions from objects that a person attends to; then other context information is used to infer the most likely intention from those potential intentions. (4) An intention-centered common sense database for ADLs is created based on people’s daily life experience. Context feature selection is performed to simplify the inference processes by selecting the most intention-related features and removing redundant context (RC).

Fuzzy context-specific intention inference.
Related work
Existing FCII applications
FCII has been frequently applied in inferring a driver’s intention using traffic-related context information, such as topological/geometrical characteristics of the intersection, traffic light status, and current/previous vehicle’s position/distance/angle with respect to the intersection. Driver intention inference was used for improving safety applications such as navigation systems. The involved fuzzy methods varied from one to another. Spatial information such as street network and location has been used to establish the fuzzy correlation with specific driver behavior patterns. 38,39 Combining this with a driver’s driving data, fuzzy logical algorithms were applied to predict a driver’s turning/following behaviors. 40,41 Based on the time sequence of driver operation behaviors, a fuzzy C means algorithm was used to calculate the similarities between acceleration features for recognizing a driver’s acceleration intention. 42 Besides driver intention inference, the fuzzy context-aware method was also used for detecting suspicious behaviors, 43 specific environment-assisted gesture intention estimation, 44 and so on.
While FCII has been used in the aforementioned applications, FCII in the robotic caregiving field is still uncommon. Previous research in driver intention, gesture intention, and suspicious behavior detection mainly focused on the context such as vehicle acceleration, 40,41,42 lane position, 38,39 action position, 43 and object distributions. 44 The context features in our study focus on those closely related to indoor ADLs such as room temperature, noise level, light intensity, and object statuses. The categorization of these feature statuses is guided by human subjective cognitions toward the surrounding environment.
FCII in elderly caregiving
For robotic caregiving, a robot should smartly and implicitly understand human intentions with minimal human physical requirements. 45,46,47 Therefore, robots should fully explore the intention-related information embedded in the surrounding environment for better intention inference performances. 48 –50
The methods described in the study by Papageorgiou et al. and Iakovidis and Papageorgiou 37,51 defined fuzzy relations among the disease-related symptoms such as cough and fever, measurement parameters such as blood pressure and radiologic evidences, and medical informatics such as age and sputum culture, to infer the disease severity for the elderly patients. Even though both their work and our work aimed to use human-related context to assist a human, however our context types and the application goals are different. They used the disease-related context to identify a human’s physical statuses, while our work aimed to use the environment-related context to infer a human’s mind statuses (desired activities).
In the study by Zhou et al., 52 based on volunteers’ subjective judgments, fuzzy features of human activities, such as watching TV and sleeping, were defined with both user interrupt levels, which denoted the human-willingness degree to be interrupted, and the alert urgent levels, which denoted the alert-urgent degree to be triggered. Based on these two kinds of fuzzy activity features, a reminder was decided whether or not to take the action “interrupting a user” to perform new tasks such as taking a phone call. In both their work and our work, the environmental context such as a human’s location was used and a human’s activity was assisted. However, fuzzy reasoning is at different levels. Their work used fuzzy features of an activity to determine the optimal reminding action (action level), while our work used fuzzy environmental context to infer human activities (activity level).
Using fuzzy context to infer a human’s indoor activities (intentions) has rarely been done before. Therefore, in this article, our main contribution is to introduce and validate the FCII method for inferring human intentions in the indoor elderly caregiving scenarios.
FCII methodology
Context processing
Fuzzy definition for context
Our research is based on a smart home environment, where context features (such as temperature, light density, humidity, and audio/video, shown in Figure 2) are measured to monitor the environment and the user. Usually, a person’s intention is connected with the surrounding environment. For example, when the outside is noisy, people are more likely to close the windows; when the weather is nice, people are more willing to walk outside. Therefore, it is crucial to decode context in a specific situation to estimate human intentions. Context is defined as any information that characterizes the intention-related situations. 23 It could be any environmental feature or entity involved in an intention-related situation, such as humidity, location, person, or objects. One type of context measurement is defined as a context feature Cp(the pth context in a specific situation and p = 1, 2, …, P, where P is the number of context features).

Different context features.
Different values of the same context feature Cp would trigger different human intentions. For example, when people feel cold they would put on more clothes. When they feel hot, they would take off some clothes. Actually hot and “cold” are human subjective feelings toward temperature. We define this subjective feelings for a specific context feature Cp as the feature status spk(the kth status of the pth context and k = 1, 2, …, Kp, where Kp is the number of statuses for the context feature Cp).
A context feature Cp can be converted into several feature statuses spk, which are defined by fuzzy membership functions based on people’s daily life experience. Human potential intentions Ig(g = 1, 2, …, G) are only connected with certain feature statuses spk, not directly connected with the context feature Cp. For a context feature Cp, the fuzzy memberships for its statuses spk are mpk correspondingly. The trapezoidal membership function is considered for a specific status spk of feature Cp with a value range of μ1–μ4. μ2 and μ3 are the values between μ1 and μ4 for intermediate feature statuses, and their relation is μ1 < μ2 < μ3 < μ4, shown in equations (1) and (2). A fuzzy factor ∂% decides the percentage of the fuzzy range in the whole range μ1–μ4. The fuzzy function mpk for Cp consists of several fuzzy status memberships Mpk(Cp), shown in equations (3) and (4) and Figure 3. The values of μ1, μ2, μ3, and μ4 are defined by volunteers’ subjective judgments, shown in equations (1) to (4). For a single feature status ranging μ1–μ4 identified by all the volunteers, the top ∂% of the data ranging μ3–μ4 and the bottom ∂% of the data ranging μ1–μ2 are with linearly changed fuzzy membership values. The remaining (1–2 ∂%) of the data ranging μ2–μ3 is with a fixed fuzzy membership value 1. The complete context feature processing process is shown in Figure 4. An environmental sensor net generates various kinds of context feature measurements. Then fuzzy statuses are assigned to each specific feature measurement. Last, the related context–intention correlations are represented as

Fuzzy memberships for context feature statuses.

Context–intention correlation framework.




Feature selection
Context information is usually redundant, and if all context features are considered, it would increase the computational cost and decrease the inference accuracy and efficiency. Therefore, feature selection is needed. Feature selection is performed at the context feature level and the criteria are based on the correlation strength f(Spk|Ig) between a context feature status spk and an intention Ig. The correlation strength f(Spk|Ig) can be also understood as the conditional probability of spk if the intention Ig occurs. For a context feature Cp, if all

Common sense knowledge representation
Common sense is the knowledge accumulation of daily life experience. It represents the empirical relations between activities, objects, and situations, such as what kind of objects is often placed in a specific location 37 and what the functions of an object are and how to use it. This knowledge is obvious to humans, but to a robot, it is often too implicit to understand or even completely missing. 53 The lack of common sense creates obstacles for HRI. To make robots smart to proactively understand humans and perform timely elderly caregiving, it is necessary to endow robots with the common sense knowledge. Based on the “life experience,” a robot can reason human intentions in a more effective and natural way. Therefore, the common sense knowledge database, representing the intention–context correlations, is developed to be intention centered based on daily life scenarios.
Objects, a critical part of context information, are always closely connected with human intentions. For instance, when a person wants to leave, he/she would frequently look at the watch. When a person is thirsty, he/she would subconsciously look at a cup or a water machine. Therefore, objects are an essential part in the common sense knowledge. In this study, objects that the user attends to Oh(the hth object, h = 1, 2, …, H) are treated as a separate category from other context features Cp. The object–intention correlations are established based on an affordance database.
The common sense knowledge includes object–intention correlationf(Oh|Ig), context status–intention correlation f(Spk|Ig), and intention possibility f(Ig) (the possibility that an intention happens in daily living). The knowledge structure is shown in Figure 5. The intention-centered common sense knowledge describes the intention-related context and their correlation strengths with specific conditional possibility values. When an intention happens, the specific situation could be decomposed into context–intention correlations and object–intention correlations.

Common sense knowledge representation.
For the general common sense structure of a single intention, we define context feature statuses and objects as “Node (Nn)” and the context–intention correlations as “Edge.” The common sense knowledge scale E from the perspective of the edge number is shown in equation (6), where H denotes the object number,

Common sense database scale estimation.

Human intention inference
Fuzzy context–intention correlation
As the fuzzy definition toward the context, a specific value of the context feature Cp may simultaneously belong to different statuses spk(k = 1, 2, …, Kp) with corresponding memberships mpk (k = 1, 2, …, Kp). Different context statuses spk are correlated to the intention Ig with different strengths, shown in Figure 7. The fuzzy context–intention correlation is described by equation (9). The value of the context feature Cp is decomposed into several feature statuses spk. The conditional correlation strengths f(Spk|Ig) (k = 1, 2, …,Kp) between different feature statuses and the intention Ig are accumulated to calculate the comprehensive context–intention correlation ffuzzy (Cp|Ig)

Context–intention correlation.

CSII based on FNBN algorithm
Based on the results of context processing and the establishment of context–intention correlation, human intention can be recognized if given a specific set of context features. A FNBN algorithm is used to conduct CSII. A NBN algorithm is a machine learning algorithm that is usually used for pattern recognition. NBN is good at reasoning the certainty based on complex uncertainties. 54 In an ambiguous situation with noise and incomplete information, an NBN algorithm has reliable classification ability, assigning the appropriate labels onto some cases with several clues. 55 Since the context–intention correlations are fuzzy and the context features could be considered as mutually independent, NBN is appropriate for context-specific intention inference, as shown in equation 8

where C is a specific set of context features given Cp(p = 1, 2, …, P). Among the intention candidates

The overall FCII method is shown in Figure 8. The method mainly includes two parts: context processing and intention inferring. First, according to the human attended objects {O1, …, OH}, affordance database, and common sense, the human potential intentions {I1, …} are generated. Then based on the common sense knowledge, feature selection is conducted to extract the strongly correlated context features {C1, …, CP} from the initial context features {C1, …,

The FCII method. FCII: fuzzy context-specific intention inference.
Experiments
Two scenario types are designed, home scenarios, which are set as volunteers’ home environments in which volunteers performed the required activities, and lab scenarios, which are set as designed lab environments in which volunteers performed the required activities. Different situations in home scenarios contain different context features that influence humans’ intentions. By performing intention inferences in these home scenarios, we aimed to validate FCII’s reliability. Lab scenarios could be intentionally designed to be specific types of intention-related situations. By performing intention inferences in lab scenarios, we aimed to validate FCII’s effectiveness and robustness. Two types of intention-related scenarios were designed in lab scenarios, “intention-dominant scenarios” in which human intentions are obvious with relatively less object and context overlap and the “ambiguous scenarios” in which human intentions are ambiguous with relatively more object and context overlap. A humanoid robot NAO was required to perform intention inference in these scenarios to validate FCII’s effectiveness and robustness.
As Figure 9 shows, intention candidates {“wash the cup,” “drink using the cup”} are related to the object “cup.” Context features available are {“time,” “cup location,” “room temperature,” “water taking times,” “noise level,” and “light intensity level”}. The experiments included three sections. In “Introduction” section, knowledge about fuzzy context and common sense was generated by processing data from the first set of questionnaires. In “Related work” section, using the second set of questionnaires, FCII for distinguishing the intentions {wash, drink} was performed in home scenarios to validate its reliability. In “FCII methodology” section, with the NAO robot, FCII for distinguishing the intentions {drink, wash} was performed in three different controlled scenarios to evaluate the effectiveness and robustness of the presented method.

FCII for distinguishing intentions {drink, wash} in controlled scenarios. FCII: fuzzy context-specific intention inference.
Context processing and common sense knowledge building
The subjective statuses of context features and potential intentions are defined by two volunteers, as shown in Table 1. Their relations with intentions were subjectively evaluated by 100 volunteers ranging in age 19–60 and then recorded by questionnaires according to their daily life experiences, including activity participations and observations. For the fuzzy context status definitions in questionnaires, questions were set as “Water Taking Times. Enough: above __times of drinking for a day; Not Enough: less than __ times of drinking for a day.” The fuzzy factor ∂% was set as 15%.
Context feature status.a
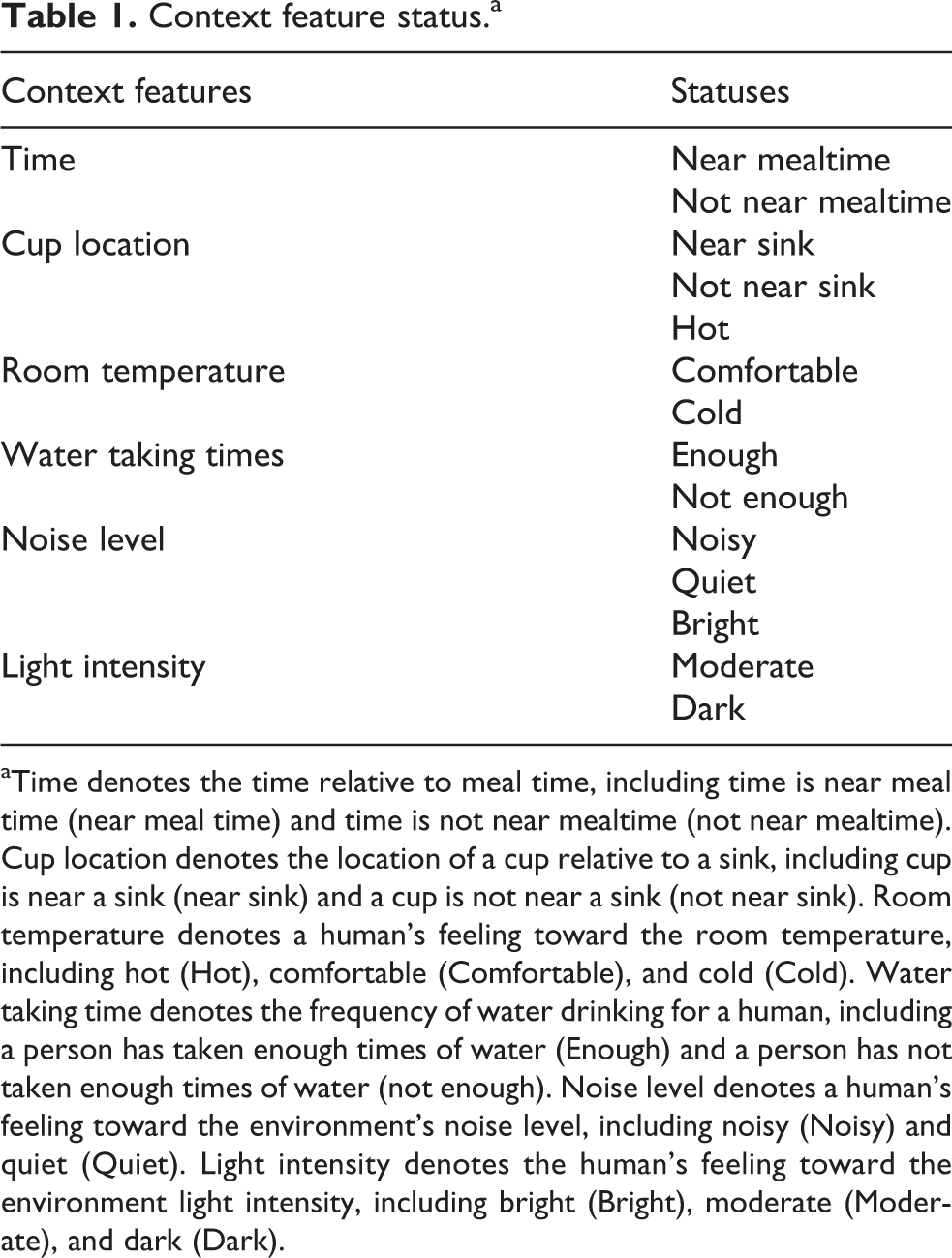
aTime denotes the time relative to meal time, including time is near meal time (near meal time) and time is not near mealtime (not near mealtime). Cup location denotes the location of a cup relative to a sink, including cup is near a sink (near sink) and a cup is not near a sink (not near sink). Room temperature denotes a human’s feeling toward the room temperature, including hot (Hot), comfortable (Comfortable), and cold (Cold). Water taking time denotes the frequency of water drinking for a human, including a person has taken enough times of water (Enough) and a person has not taken enough times of water (not enough). Noise level denotes a human’s feeling toward the environment’s noise level, including noisy (Noisy) and quiet (Quiet). Light intensity denotes the human’s feeling toward the environment light intensity, including bright (Bright), moderate (Moderate), and dark (Dark).
The common sense knowledge representations were wash/drink centered. For extraction of the context–intention common sense knowledge, questions were set as “Water Taking Times. Enough: □Wash □Drink □None; Not Enough: □Wash □Drink □None.” By statistical analysis of the questionnaire results, the intention probability


where N is the total number of scenarios,
The context features Cp that have all status–intention correlations
Reliability validation in home scenarios
Situations of performing activities in home scenarios were recorded using a new set of questionnaires, which were finished by 20 new volunteers. In each questionnaire, a volunteer was required to write down the “close-to-truth” environmental context conditions under which his/her intentions {wash, drink} usually occurred. The environmental context conditions were expressed by context feature statuses according to volunteers’ subjective feelings toward their surrounding environments. The FCII method was performed in these scenarios. For example, in a scenario {close to mealtime, cup location close to sink, temperature comfortable, quiet}, a volunteer indicated his intention as wash. The features related to {wash, drink} were first selected. Then by the FNBN algorithm (equation (9)), the probabilities of {wash, drink},
Effectiveness and robustness verification in lab scenarios
Scenario 1 was a “wash-dominating scenario” with more strongly correlated context features of wash than those of drink {time to meal: 26 min, location to sink: 0.55 m, drinking times: 4, light intensity: 509 lux}. Scenario 2 was a “drink-dominating scenario” with more strongly correlated context features of drink {time to meal: 10 min, temperature: 27°C, enough drinking times: 2, noise level: 60 dB}. Scenario 3 was an ambiguous scenario with equal numbers of SCS for both wash and drink and also with more RCs, {time to meal: 50 min, location to sink: 0.6 m, temperature: 29°C, drinking times: 5, noise level: 40 dB, light intensity: 300 lux}. In all three scenarios, different kinds and degrees of RC information were added intentionally. The human intention in each of these scenarios was inferred using FCII method.
Results
Results for context processing
According to the first set of questionnaires, fuzzy context definitions are shown in Figure 10. Statuses {14–68 min to the meal time, 0.5–1.4 m distance between a cup and the sink, 10–16°C and 23–30°C of room temperature, 3–8 drinking times per day, 50–65 dB noise level, 70 160 lux and 500–550 lux light intensity} were the fuzzy range in which a feature value belongs to two statuses. For example, the cup–sink distance 0.8 m was categorized into two statuses, with the membership 0.33 for “close” and 0.4 for “far.” This fuzzy categorization for the cup-sink distance is reasonable. When the cup-sink distance is between 0.5 m and 1.4 m, it is hard to classify as absolutely close or far. We can only subjectively think some distance values are closer to close or far.

Fuzzy context Cp.
Context status–intention correlations

Context status–intention correlations f(Spk|Ig).
Probability f(Ig) for cup-related intentions.

Wash/drink-centered common sense knowledge representation.
SCS and RC.

SCS: strongly correlated statuses; RC: redundant context.
Reliability validation in home scenarios
Figure 14 shows the detailed process of FCII in one of the designated scenarios. In this scenario, the designated context included {time close to meal, cup location close to sink, comfortable temperature, high noise level}. As volunteers were asked to directly designate context statuses, the designated scenarios were then all ideal situations. That is, each context feature had only one status with the membership 1, and all its other statuses with the memberships 0. The inferred intention was wash which was consistent with the volunteer’s designated intention. Among the 20 questionnaires, 90% of the wash intention was recognized successfully, and 95% of the drink intention was recognized successfully. The inferred intentions were highly consistent with the volunteers’ designated intentions. Therefore, the FCII method based on the empirical common sense knowledge is reliable to get satisfactory inference performances.

Detailed FCII process in a home scenario. FCII: fuzzy context-specific intention inference.
Effectiveness and robustness validation in lab scenarios
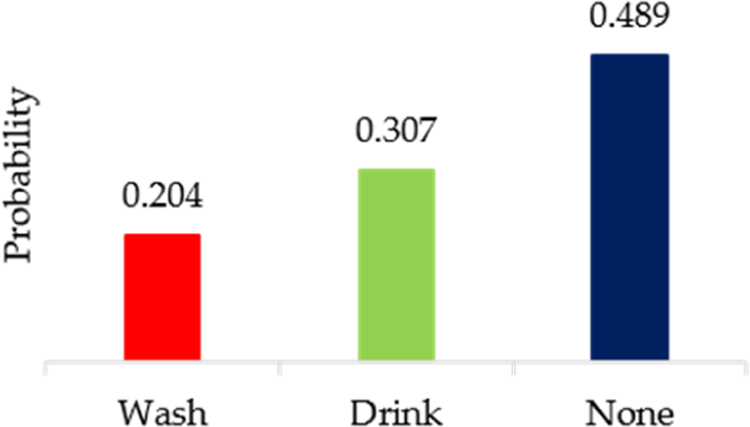
For each scenario, the memberships of context statuses for each context feature were first calculated, as shown in Table. 3. Based on equation (9), {wash, drink} intentions in these scenarios were recognized, as shown in Figure 15. For the wash-dominating (shown in Figure 16) and drink-dominating scenarios, the inferred intentions were the same as their dominating intentions, respectively. The good performance of resisting the RC disturbances in scenarios 1 and 2 verified the robustness of the FCII method. In scenario 3, the inferred probabilities of both intentions were too close to infer the actual intention. This result was reasonable because even humans could not infer others’ intentions in a scenario with highly mixed context features. In this situation, more clues would be needed to perform intention inference.

FCII results in three scenarios. FCII: fuzzy context-specific intention inference.

FCII process for scenario 1. FCII: fuzzy context-specific intention inference.
Interpretation of context features to fuzzy context statuses for three scenarios.

fea: sensor values for environmental feature statuses; Mem: membership for the environmental statuses.
Discussion
This fuzzy context research is meaningful in developing practical applications. Existing research such as study by Liu and Zhang and Tahboub 6,12 used the sensory data for intention inference directly. However, given the knowledge embedded in data is more important than data value itself, direct usage of sensory data is not enough for getting satisfactory intention inference performance. With the FCII method, objective sensory data is mapped into humans’ subjective feeling/knowledge. Given an intention is a subjective decision of a human, using humans’ subjective feeling/knowledge to decode subjective decisions is meaningful.
Moreover, to make the FCII method more capable of solving practical problems in general real-world situations, efforts have been put in our paper on improving the method’s general applicability, summarized as follows (“Discussion” section). (a) The fuzzy method is developed for generating context feature statuses from different types of sensory data, as shown in equations (1) to (4). With statistical learning methods in equations (10) and (11), the sensory data was interpreted into intention-related knowledge by measuring the involvements and influences of these statuses given a human intention. (b) The feature selection method was developed for selecting the dominant feature statuses related to a human intent, as shown in equation (5). With this method, the interpreted knowledge is truly useful for understanding practical human intention–related situations. (c) We developed a fuzzy context-based intention inference method, as shown in equations (8) and (9). With this method as well as the generated knowledge, human intentions could be inferred in various environment conditions. (d) To further improve the method’s general applicability, we designed the knowledge representation with an intention-centered manner, which enables a linear relationship between the number of intentions and the number of dominant features. This linear relationship reduces the scale of the knowledge and leaves potential to easily generalize the method to a larger number of intentions.
Conclusion and future work
In this article, we presented a novel FCII method to allow robots to implicitly infer the elderly’s intentions in ADLs. Based on human daily life experience, we defined statuses of context features involved in ADLs in a fuzzy manner. Each context feature owns several fuzzy statuses, similar to human subjective feelings toward the surroundings. We also established the intention-centered common sense knowledge to endow robots with the knowledge of general context status–intention correlations. With the fuzzy context statuses and the intention-centered common sense knowledge, an FNBN algorithm was used to infer the human desired intention.
Simulations and experiments were conducted using questionnaires and the humanoid robot NAO. Fuzzy context memberships and common sense knowledge were generated from volunteers’ daily life experience through the form of questionnaires. Under the volunteer-designated scenarios defined, the high reliability of the FCII method was validated by the high success inference rate. In addition, the effectiveness of the FCII method was validated by its good performance of translating initial raw context measurements to fuzzy context statuses and inferring intentions that are reasonably consistent with a human’s performance.
In the future work, we will improve the applicability of our FCII method by involving more objects/context and constructing a more complete knowledge structure with the consideration of intentions’ interaction. With these improvements, we aim to use the FCII method to infer a larger number of ADL-related intentions. Moreover, advanced experimental systems would be developed to perform practical experiments to evaluate FCII’s performances. Last, our future plan includes using FCII to develop a knowledge-supported robot, which will be endowed with a large amount of knowledge for intelligent decision-making.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.