
Abstract
The working efficiency of a parallel manipulator with double moving platforms is better than a parallel manipulator with a single moving platform. In this study, a 2 (3HSS+S) parallel manipulator is presented, and the topology model of the parallel manipulator is established. After calculating, the position and velocity of the manipulator were analysed, and the workspace was obtained under the constraint conditions of parallel manipulator. Within the workspace, the motion dexterity was studied using the reciprocal of the condition number of the motion Jacobian matrix. The static load-bearing performance was analysed through the two norms of the force Jacobian matrix. The two performance indices, which are motion dexterity and static load bearing, indicate that the manipulator has favourable performance characteristics in the range of positive values of angle, which is the rotation in z-axis, but it has a singular position in the range of large negative values of angle. Within the scope of the singular point, the maximum and minimum eigenvalues of the stiffness matrix and the kinematic stiffness index (KSI) were analysed. It has been concluded that the stiffness characteristics are poor near the singular points, and the correctness analysis of the two performance indices has been verified by the results.
Introduction
Compared to traditional serial robots, parallel manipulators with lesser freedom degrees have such advantages as high stiffness, high precision and high bearing capacity and have been widely used. 1 –3 The workspace of a parallel manipulator is one of the most important indices to evaluate the parallel manipulator. For the solution of the workspace of a parallel manipulator, many studies have been conducted by research groups around the world. 4,5 According to the kinematic characteristics of the end actuator of a parallel manipulator, the workspace of a parallel manipulator was divided into a flexible motion space and a reachable motion space by Kumar and Waldron. 6 The methods of solving the workspace of parallel manipulator mainly include a numerical method and an analytical method. The numerical method 7 to obtain the workspace of a parallel manipulator is mainly based on inverse kinematics, structural parameters and restrictions. The analytical method 8 involves solving through the concrete function relation. The analytical method is relatively complex but exhibits high accuracy. The numerical method is simple and applicable, but it is less precise, and the precision of the numerical method depends on the selection of its searching step size.
The performance analysis of a parallel manipulator primarily contains motion dexterity, static load and stiffness matrix. Researchers in this area have conducted the corresponding analyses and studies. Denavit et al. 9 considered the determinant value of the Jacobian matrix as the index of motion transmission. Salisbury et al. 10 used the condition number of motion Jacobian matrix for studying the motion characteristics of parallel manipulator. By separating the motion Jacobian matrix of parallel manipulator, the mobile and rotating performance was studied by Cardou et al. 11 In recent years, many scholars have studied the motion characteristics of different manipulators 12,13 but mostly for the manipulators with a single moving platform. The stiffness of parallel manipulator is closely related to its accuracy, which means that it is very important to study the stiffness. Portman et al. 14 studied the parallel machine tool using the minimum stiffness index in the workspace. Wang et al. 15 used the full rank of Jacobian matrix and analysed the stiffness of a Tricept parallel manipulator. The semi-analytical theoretical stiffness model of a parallel kinematic machine was verified by the stiffness experiment, considering gravitational effects. 16
To date, most studies examined the parallel manipulators with a single moving platform, but several studies have analysed the parallel manipulators with double moving platforms, which has the advantages of high efficiency and low cost.
This article presents a novel 2 (3HSS+S) parallel manipulator with double moving platforms, and the position and velocity of the manipulator were analysed. The numerical method was used to solve the workspace of the parallel manipulator using the structure parameters and motion parameters of the manipulator. Based on the motion Jacobian matrix and the force Jacobian matrix, the analyses of two performance indices were performed. According to the stiffness matrix, the stiffness characteristics of the points near the singular points were studied, and the performance analyses were provided for the subsequent performance optimization.
Velocity analysis
The description of the manipulator and the establishment of the coordinate system
A parallel manipulator with double moving platforms with three degrees of freedom is composed of two moving platforms m
1 and m
2, a bottom base, three linear module and a peripheral support. Two moving platforms connect the linear module through the connecting rod. The intermediate support is fixed on the fixed platform and connects to the centre of the moving platform with a thrust bearing. This support is used to balance the loading force of a hydraulic cylinder and supports the manipulator.

Topology structure of parallel manipulator and its virtual prototype.
The established coordinate system is shown in Figure 1(a) and includes a fixed coordinate system and two moving coordinate systems. The fixed coordinate system is established on the fixed platform B at its centre point O, with the reverse extension line of Ob 3 as x-axis, and the normal line of the fixed platform as z-axis. The moving coordinate system is established on the moving platform m 1 at its centre point o 1, with line o 1 a 12 as y-axis, and the normal line of the moving platform as z-axis, as shown in Figure 1(a). The coordinate system of the other moving platform m 2 is established in a similar manner as m 1. Two moving platforms and the fixed platform form an equilateral triangular structure, with radii r and R, respectively. The virtual prototype of the parallel manipulator is shown in Figure 1(b).
It is enough to analyse every moving platform separately, due to the similarity in their sizes and structure. As an example, the moving platform m1 has been analysed as follows.
Assuming that the coordinates of three points of the fixed platform in the fixed coordinate system are
Velocity analysis
Analysis of the coordinate and position
According to the topology structure, let

where

Velocity analysis
The velocity
For the first case, there is

where
As the moving platform has three degrees of freedom rotation,
For the second case, we have

where
Combining equation (3) with equation (4)

In order to eliminate

Rewriting equation (6) in the matrix form

where
Performance analyses
Workspace analysis
The set of kinematic positions that can be reached by the end actuator is known as the workspace of the manipulator. The size of the workspace represents the motion range of the manipulator, which is an important index to evaluate the working ability. In order to meet the motion requirement, it is necessary to analyse its characteristics. The solution to the workspace is the premise of the performance analysis, so it is very important to solve the workspace. Before obtaining the workspace, the constraint conditions of the manipulator must be specified, which primarily include the following aspects: (1) The movement constraints of sliders: The sliders are in the linear module reciprocating movement by vertical direction, and the minimum and maximum movement heights of each slider are indicated by (2) The movement restrictions of the rotating angles of spherical hinges: The movement rotating angle of the spherical hinge is generally determined by the structure size. In the actual movement process, the allowable angle of the spherical hinge is limited. Supposing that the normal vector of the spherical hinge of the moving platform is
where (3) The interferences between the adjacent rods: The length of the connecting rods can achieve the maximum and minimum values of the positions of the sliders, and the maximum radial diameter of each connecting rod should be less than the shortest distance between two adjacent rods.


During the workspace analysis of 2 (3HSS+S) parallel manipulator, a general posture space is defined through the constraints. In the scale of the posture space, the positions where the constraints are not met are given up, and the positions left are the workspace of the manipulator.
The structure parameters of the parallel manipulator are defined: r = 144 mm, R = 240 mm, l = 320 mm and h = 830 mm.
First, a general workspace is given, and then the scope of the workspace is further determined with the coordinate search method using MATLAB, R2012b.
According to the structural design of the spherical hinge of the manipulator, the maximum allowable angle is taken as 30°, the motion space ranges of three-dimensional rotating angles are defined
The workspace of the manipulator is obtained by numerical simulation, and the simulation is shown in Figure 2.

Workspace of the parallel manipulator.
Motion dexterity analysis of the manipulator
According to equation (7), supposing that the movement error of the linear module is

Choosing matrix norm on both sides of equations (7) and (10) respectively, and there is

The condition number of the motion Jacobian matrix is defined as:
Thus, the condition number of the motion Jacobian matrix reflects the magnification between input velocity and output velocity.
The motion dexterity is the ability to alter the position and posture of the manipulator, and it is one of the performance indices to measure the kinematic performance of the manipulator. Because the motion Jacobian matrix is the mapping relationship between the kinematic chains and the end actuator, the motion dexterity of the manipulator can be judged with the motion Jacobian matrix. Usually, there are two ways to describe the motion dexterity of a parallel manipulator, namely, operability and matrix condition number. The former is based on the determinant of the product of the motion Jacobian matrix and its transposition, but its stability and accuracy are relatively low. The latter is based on the condition number of the motion Jacobian matrix, and it is the amplification factor of the relative deviation of the input speed. The matrix condition number determines the solution of the accuracy and stability, and it is a measure of the motion Jacobian matrix. As the condition number amounts to 1, the position is called isotropic, and the motion transmission performance of the manipulator is at its best. Conversely, while the condition number is far from 1 and tends to infinity, the manipulator is in a singular position, and the motion transmission performance is extremely poor. In summary, the conditions of the motion Jacobian matrix can be taken to measure the motion dexterity.
Taking the reciprocal of the condition number of the motion Jacobian matrix as the motion dexterity analysis of the manipulator, there is

The value of the motion dexterity of the manipulator is between 0 and 1. The higher the value of the motion dexterity, the better the performance of the manipulator. The simulated results of the motion dexterity are presented in Figure 3.

Motion dexterity distributions in the workspace.
From Figure 3, it can be determined that the motion dexterity distributions are symmetrical surfaces, and the two symmetrical axes are α = β and α + β = 24°. Horizontal contrast: in the positive value range of γ, the motion dexterity of the manipulator is preferable. When γ is in the negative value, the performance is relatively poor. Longitudinal comparison: While γ takes the positive value, the motion performance of the manipulator is better. In the process of the change of γ, there is no position where the motion dexterity equals to 0. However, when γ is in the negative value, the motion dexterity of the manipulator is much poorer. As γ approaches −25°, the position where the motion dexterity is 0 appears. The location is that the condition number of the motion Jacobian matrix is infinite, and the distributions of α and β are within −12° and −24°, respectively. With the increase of the absolute value of γ, the point is also changing and moving along the direction of
The static load analysis of the manipulator
The bearing capability of a parallel manipulator is the ability of the end actuator to bear pressure and load, and it is one of the most important indices to measure the motion performance of a parallel manipulator.
Supposing that the virtual displacement of the actuated joints is

Because the virtual displacement of the system is infinitely small, it can be used instead of the velocity vector. Therefore we have

As

Define
Taking 2 norms to both sides of equation (15), there is

As the moving platform is under the given external force, the value of the required driving force is determined by the upper limit of norm
On adopting the form of the reciprocal to define the static load capacity index, there is

The parameter

Static load-bearing index distributions in the workspace.
By comparing Figures 3 and 4, it can be obtained that the static load performance is basically consistent with the motion dexterity performance. The static load-bearing performance index possesses symmetric surfaces, and the two axes are α = β and α + β = 24°. Horizontal analysis: The static load-bearing capacity when
In addition, the motion dexterity and the static load-bearing performance are similar but not completely equal, and their changing trends are identical.
Stiffness analysis
Stiffness matrix
This section discusses the stiffness characteristics of the manipulator under ideal conditions. Supposing all the components of the manipulator are rigid, without deformation, the deformations that are influenced by transmission mechanism and server system are considered. Under these conditions, the model obtained is the conceptual stiffness model.
17
Assuming that the deformation of the actuated joints is

where
From the section Motion dexterity analysis of the manipulator, we obtain

where
Combining equation (15), there is

where
Supposing that

The deformation of the moving platform is only determined by

where
As γ = −30°,
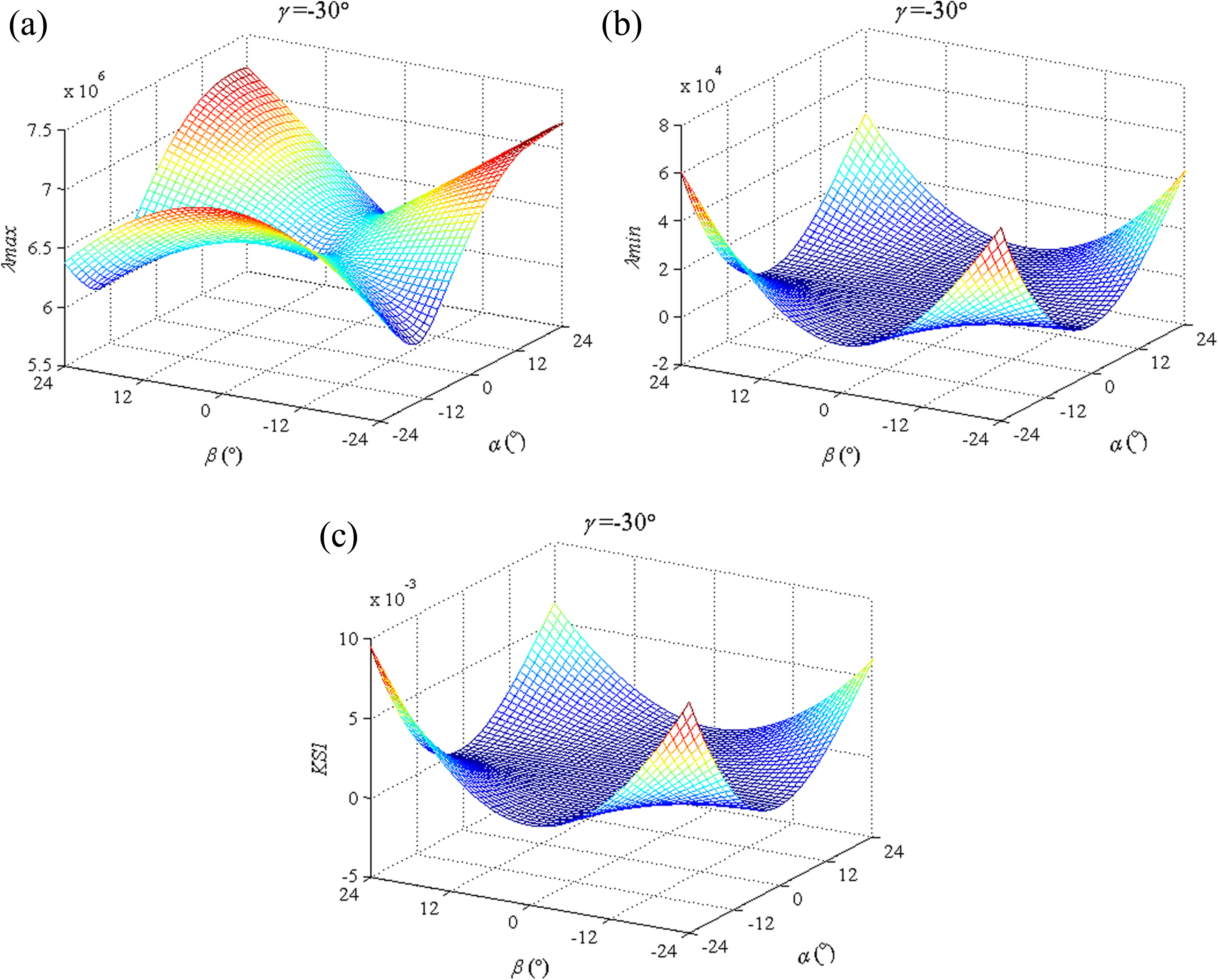
Performance distribution of stiffness matrix.
As shown in Figure 5, as γ = −30°, the maximum and minimum stiffness characteristic value and the KSI index are symmetrically distributed along the axis of
Conclusions
The topological structure of 2 (3HSS+S) parallel manipulator was built, and the analysis of its position and velocity were conducted. Considering the constraint conditions of parallel manipulator, the numerical method was used to calculate the workspace of parallel manipulator. In the workspace, first, the distributions of the motion dexterity and the static load were studied. It is apparent that both of the two performance indices are affected by the singularity, and their distributions in the workspace are broadly consistent with each other. Furthermore, the motion performance is better when γ is in the positive angle range. Additionally, for the motion performance, the optimal rotating angle γ appears in the vicinity γ = 20°. On the contrary, while γ is in the negative large angle range, especially when it is less than −25°, the performance of the manipulator is poor, and in this case, the singular position will exist. Therefore, in the process of the movement, this case should be avoided. In addition, as γ takes a constant value, although the direction of α and β are transformed simultaneously, two states of the manipulator possess identical performance. In addition, when γ = −30°, where the position is near the singularity, the maximum and minimum eigenvalues and the KSI index were analysed. It was also indicated that in the middle position of the curved surfaces, the stiffness indices near the singular point are poor. Meanwhile, the correctness of the analytical results of the two performance indices was verified by the results of the stiffness matrix analysis.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work supported by a Project Funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions, Top-notch Academic Programs Project of Jiangsu Higher Education Institutions and the Fundamental Research Funds for the Central Universities (Grant Number 2014ZDPY31), is gratefully acknowledged.