
Abstract
A path planning method for searching the most reliable path in uncertain environments is proposed in this article. When a robot chases a target in a semi-structured workspace with hazards and uncertainty, which path it takes is of great matter as different paths can lead to diverse risks. To “enlighten” the robot on a wiser choice, a reliability-based topological map is built, in which it is possible to add uncertainty information such as threats and road condition to topological nodes. With this map, the robot is possible to minimize risks in carrying out a target search task. Further simulation and physical-world experiments indicate that the most reliable path method generates a path a bit longer, following which the robot encounters less risks.
Introduction
Target search refers to search for one or several targets in an environment with one or more robots, which involves image processing and computer vision, 1 –3 path planning, 4,5 simultaneous localization and mapping, and so on. 6,7 During the past decade, path planning for target search is one of the most interesting and challenging problems. Different planning methods have been proposed to deal with target search problems for various applications, such as home service, plant and deep sea exploration, autonomous rescue and security patrol. 8,9
The existing methods can be roughly classified into two kinds: deterministic target search methods and probabilistic target search methods. In the earlier stage, studies of path planning for target search mainly focused on deterministic approaches, in which uncertainties in the environments are ignored. In these works, time is the most important index to evaluate exploration strategies. However, most workplaces, such as a private home and an earthquake-stricken area, are unpredictable and uncontrollable. In addition, when the mobile robot lacks critical information for its tasks, 10,11 which may include limited sensors, algorithmic approximations, and so on, uncertainty also appears. 12,13 As a result, the robot has to cope with increasing uncertainties in carrying out its tasks. 14 Therefore, researchers introduce probabilistic target search approaches, which are more robust in dealing with uncertainties. Sarmiento et al. verified that a route that optimizes the expected time does not necessarily optimize the route length in some target search tasks 4 and presented a continuous search method to optimize the expected time for target search. Sebastian believed that the path of a robot could be threatened by bad conditions of the workspace, which increased uncertainty. 15 Zhu et al. pointed out that the terrain could influence some robot tasks for the robot localization and the traversability of path. 16
This article aims to present a planning approach for the most reliable path in uncertain environments and then applies it to improve the reliability in robot target search tasks. A reliability-based topological map is built, in which it is possible to add uncertainty information such as threats and road condition to topological nodes. With the topological map, the path planning method is employed to generate a reliable path for the robot’s target search. Compared with Zhang et al.’ study, 17 in this article, more theoretical analysis and detailed experiment tests are provided: For example, global objective function for the most reliable path planning is discussed, method of how to plan the path between landmarks is elaborated, and target tracking systems for target search is presented.
The organization of this article is as follows. In the section “Problem definitions,” the reliability-based topological map and the target search problems are discussed. In the section “A strategy for finding the most reliable path,” a path planning strategy for finding the most reliable path is proposed. Experimental results are provided and discussed in the section “Experimental results.”
Problem definitions
Reliability-based topological map
With the absence of uncertainty, a robot can maintain a constant speed; thus, time is the most important criterion to evaluate the quality of exploration strategy. In this case, the shorter road is superior to any longer ones. However, in physical world, narrow corridors, uneven terrain, or turnings could slow and even bring damage to a robot.
Figure 1 shows two simple environments, through which different threats and uncertainties that a mobile robot may face will be illustrated. It is drawn by map editor of three-dimensional operating system (3DO) company. In Figure 1(a), path B is shorter than path A, but it is close to a river; a robot is at risk of falling into water when running along the path. Therefore, path A is more reliable than path B. In Figure 1(b), path B is shorter, but its surface configuration is terrible, a robot might be trapped. In cases like these, the most reliable road may not be the shortest one. Thus, uncertain factors alike should be considered in path planning for a mobile robot.

Reliability-based topological map.
For a topological map

Figure 2 is a toy-like reliability-based topological map

Simple environments.

where

Target search problem
For a semi-structured environment E with some real-time changes, for example, a building where several people walk about, a set of observation points
Therefore, planning the most reliable path for target search becomes a global maximization optimization problem, and the global objective function is

where
A strategy for finding the most reliable path
Sequence planning
The Floyd–Warshall algorithm is a well-known and well-studied algorithm to search for the sequence of vertexes and edges with minimum weight in directed and undirected graph.
18
In this study, Floyd–Warshall algorithm will be improved to solve the most reliable path problem, as there are some disparities between the two. For computer graphics, the Floyd–Warshall algorithm is used to find the shortest path in a weighted graph; it has little to do with real feasibility of robot tasks in the physical world. Therefore, in target search problem, if the arranged path is blocked or destroyed, the robot needs to plan another one to achieve its objective immediately. In the Floyd–Warshall algorithm, any weight of edge is constant, while the reliable information of environments should be updated on time in the latter task. There are many factors influencing the reliability of roads in target search, varying from robot to robot, task to task. Therefore an appropriate

where there are n vertexes in this topological map. By equation (3), the probability matrix D1 can be transformed into the reliable matrix

The sequence planning algorithm is as follows.
Step 1. Compute the probability matrix D1 according to the workspace with equations (1) and (5);
Step 2. Compute the reliable matrix
Step 3. Sequence planning with the Floyd–Warshall algorithm.
Step 4. If the update time is up or the robot is on a dead road, update the reliable information and location of target, and repeat step 1.
Algorithm Se_Planning( ) initialize while(the task is still in progress) calculate calculate for(k = 1; k<=n; k++) for(i = 1; i<=n; i++) for(j = 1; j<=n; j++) if (the path with max reliability through the node Om) then end if if (the update time is up or the robot is on a dead road) update
Through the above sequence planning algorithm, the most reliable path can be obtained. Theoretical evidences of the optimality can be found in literature. 19 Floyd–Warshall algorithm is often used to find the minimum weight path in graph theory. 20 The most reliable path problem is a kind of weight optimization problem in a connected graph. Therefore, the Floyd–Warshall algorithm can find the global maxima. 19
APF trajectory planning
With the Floyd–Warshall algorithm, we can get a sequence of vertexes

Point charges in the improved artificial potential field.
The combined field is

in which, the attractive function is
According to the attractive function and repulsive function in Ge and Sui’ study, 23 an improved attractive function is

The repulsive function is

In which
The procedure figure of the strategy for finding the most reliable path in environments with uncertainty is shown in Figure 4.
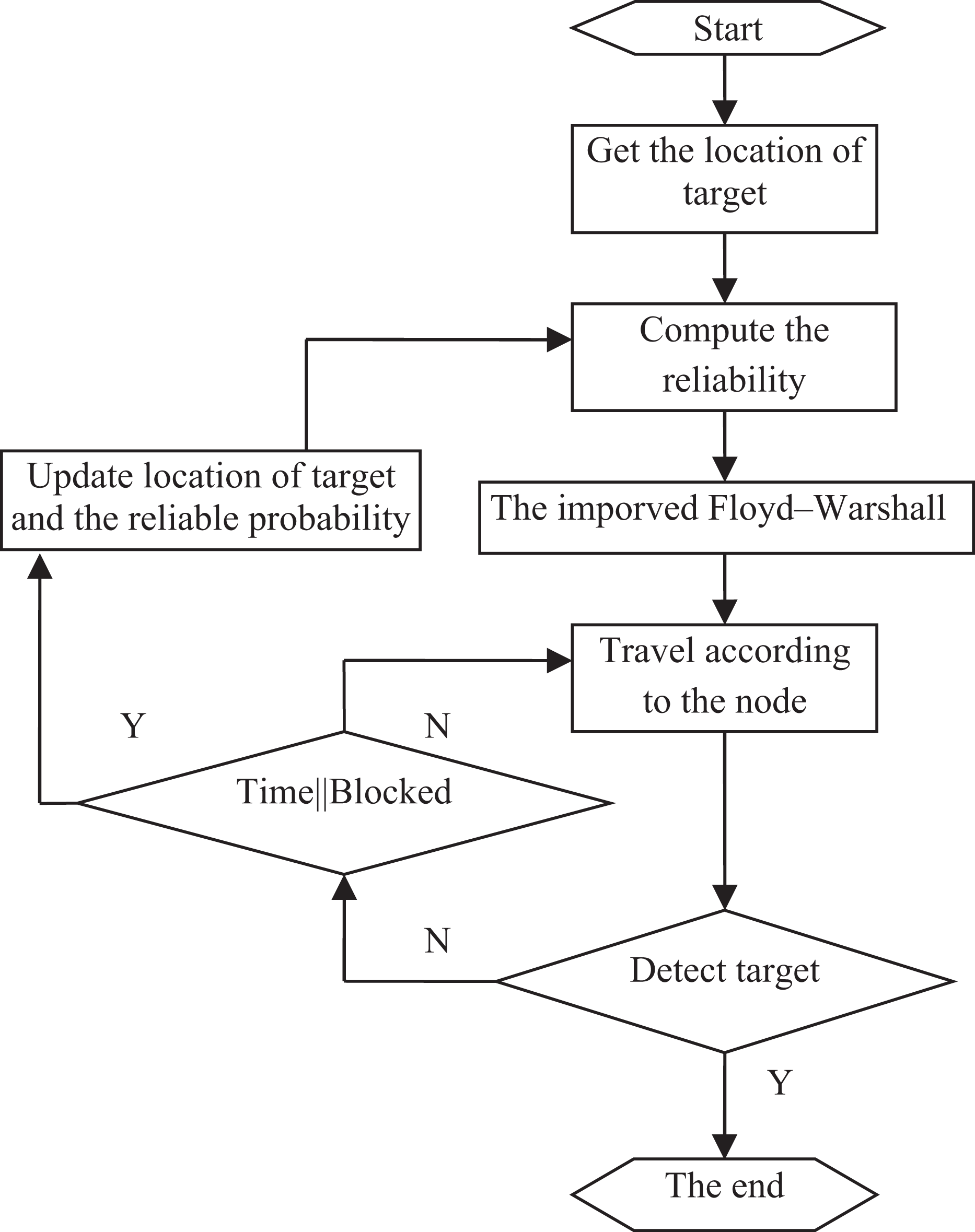
Procedure figure of the most reliable path planning.
Experimental results
In this section, simulation results and cases studies in a physical world are detailed. A robot named Powerbot is applied to search for an orange ball in synthetic environments.
Simulations
In simulations, the robot moves at a speed of 0.5 m/s, S0 denotes the initial location of the mobile robot.
In environment I, the narrow corridor is a threat factor for the robot.
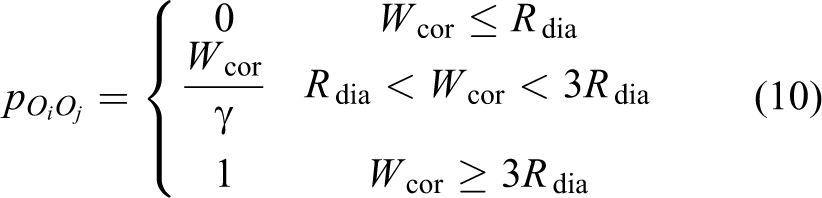
where

Wcor and Lcor denote the width and the length of a narrow corridor; Rdia is the diameter of the robot; and ceil (A) is the nearest integer greater than or equal to A.
The shortest path is generated by the Dijkstra and APF, as shown in Figure 5. The most reliable path planned by the proposed algorithm is shown in Figure 6. From the results in Table 1, we can see that the most reliable path is not the shortest path. By this way, the robot might spend more time accomplishing the task; however, it takes less risks. This toy-like environment is only used to show how the proposed method works when it faces risks.

The path generated by the Dijkstra and APF in environment I. APF: artificial potential field.

The path generated by the proposed method in environment I.
Comparison between the shortest and the most reliable path in environment I.

Environment II is used to simulate an indoor environment, in which there are 10 observation points. Each edge between two points has different reliability. A mobile dangerous hunter, which can cause damage to the robot, is put into the workspace.
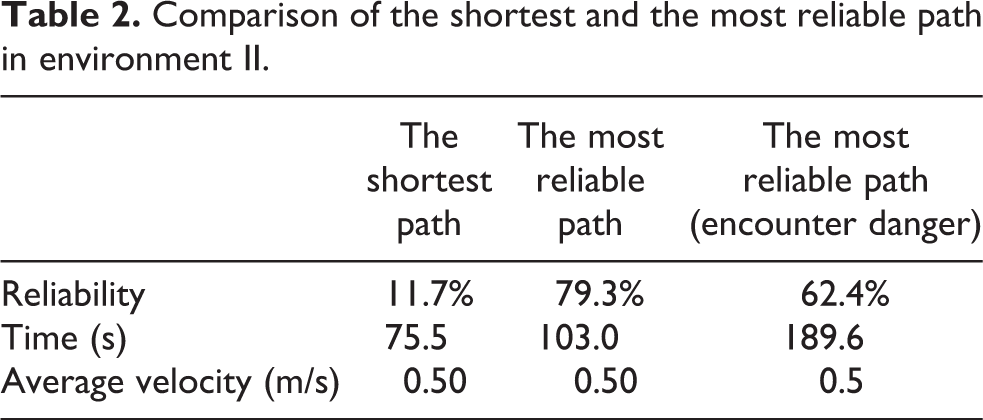
The shortest path is generated by the Dijkstra and APF, as shown in Figure 7. Table 2 shows that time used to complete the target search task with the Dijkstra and APF algorithm is shorter than that of the most reliable path approach in this particular environment. In most cases, the robot would choose the path in Figure 8; however, if it encounters the hunter, the route will be replanned, as shown in Figure 9. In the above situation, the performance of the improved APF is shown in Figure 10.

The Dijkstra and APF in environment II. APF: artificial potential field.
Comparison of the shortest and the most reliable path in environment II.

The most reliable path in environment II.

The most reliable path in environment II (encounter danger).
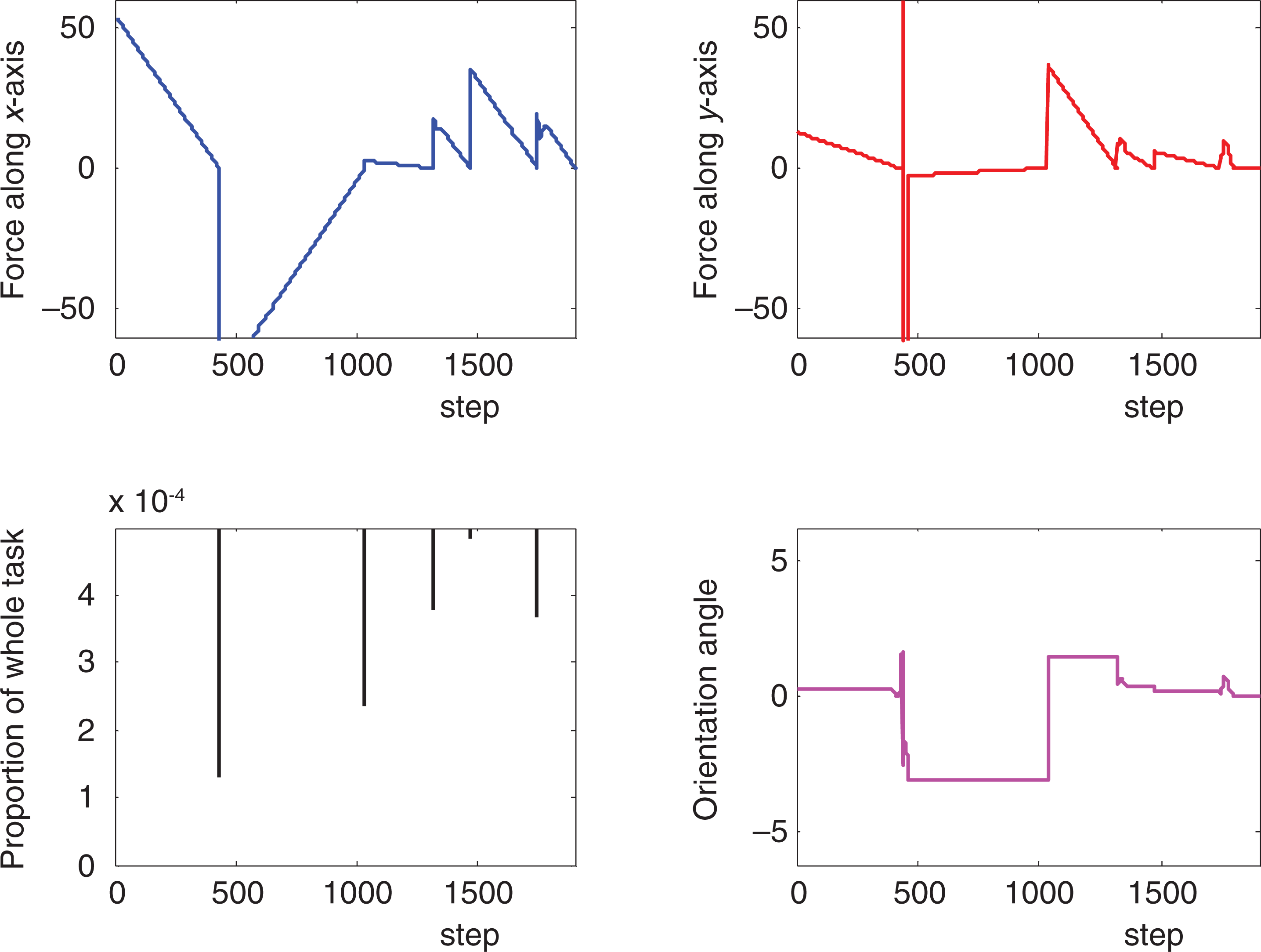
The improved APF in environment II (encounter danger). APF: artificial potential field.
Physical-world experiment
The environment for applications is built in the laboratory. In this physical world, the mobile robot cannot keep a constant speed for a lot of reasons, such as the friction of ground, turnings at corners. The robot also needs time to detect obstacles and the target. In the following experiments, a robot named Powerbot was applied to look for a table tennis ball. The Powerbot is a differential drive robot equipped with vision systems, segmented bump, ranging sonar and laser.
A CamShift algorithm with Kalman filter 24,25 is used to recognize the target, track the table tennis ball with histogram, as shown in Figure 11. The searching window can adjust adaptively according to the size of targets. The robot could track the moving balls and partially obscured target with this algorithm.

Target search system.
Five independent runs of each method is used to test the average of time cost and reliability, as shown in Table 3 and Figure 12. Compared with the shorter path, the most reliable path method generates a road a bit longer, and the robot takes more time to finish the task. When the robot travels along the shortest path, the average velocity is lower, because it spends too much time in preventing itself from colliding obstacles. Feature map in Figure 13 is built by the robot using laser sensors. According to the trajectory of robot in Figure 13, the most reliable path planning method chose a path with less narrow corridors in this particular environment.
Comparison of the shortest and the most reliable path.

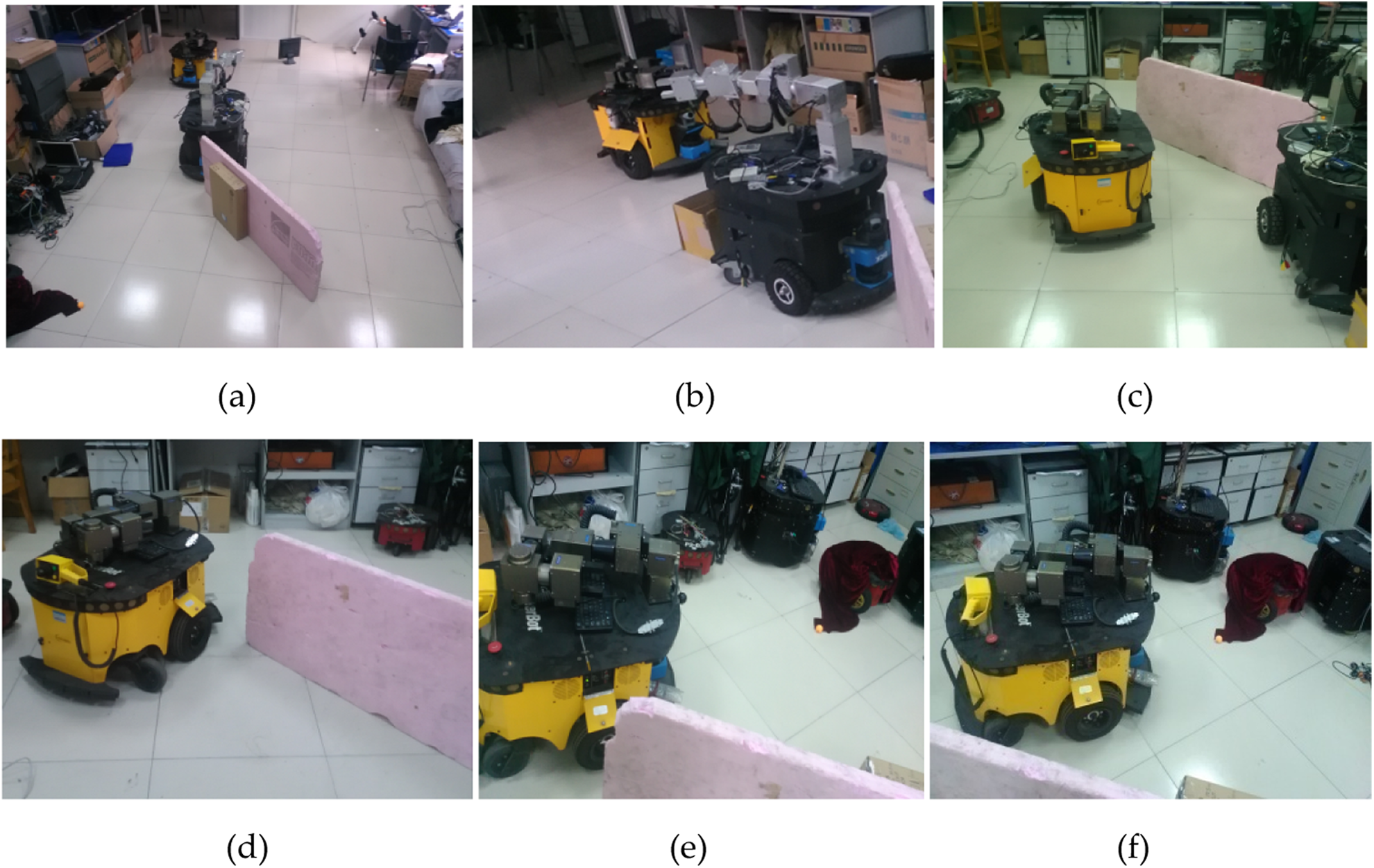
The experimental environment for the most reliable path planning.
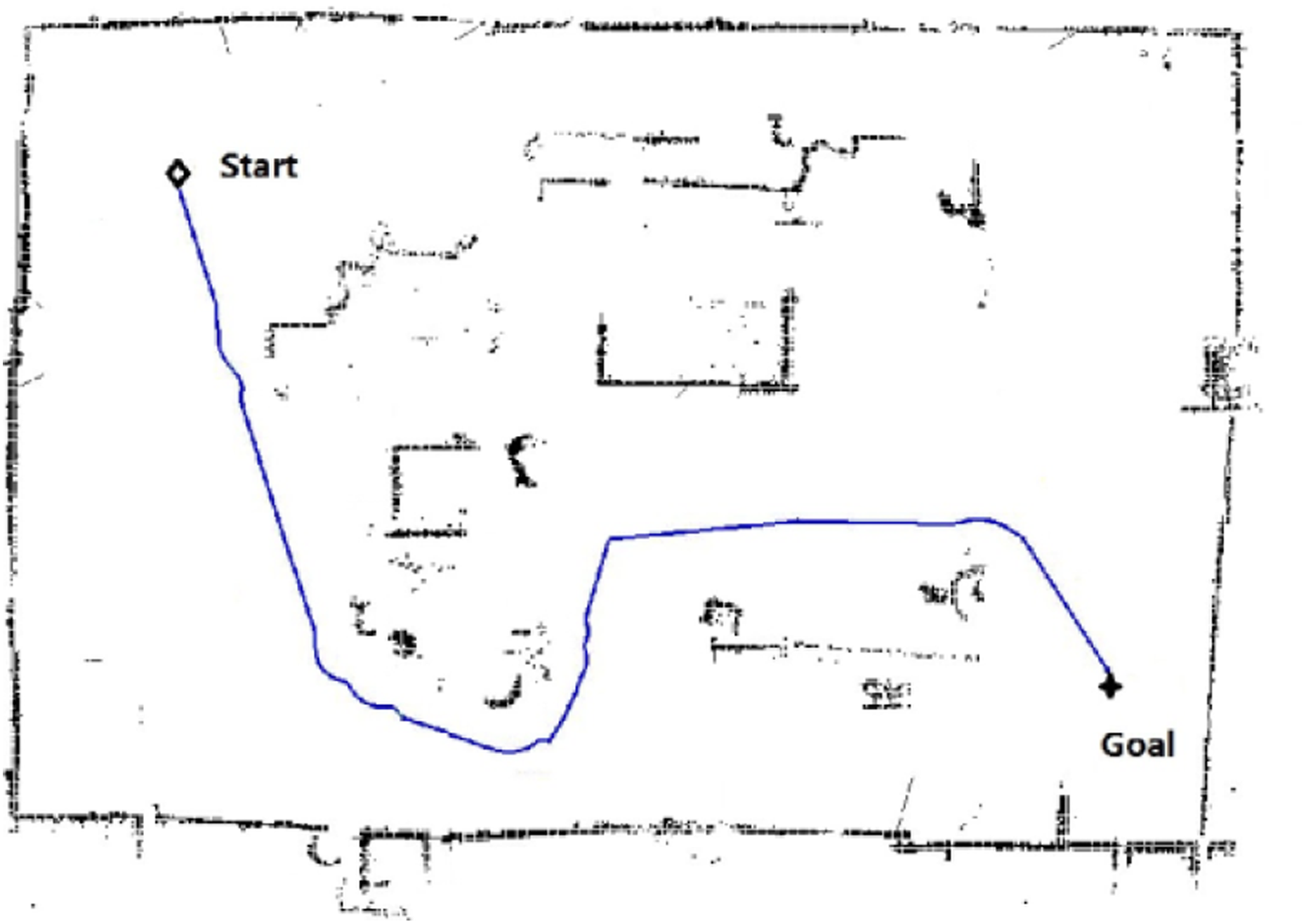
The most reliable path.
Conclusions
A strategy for finding the most reliable path in environments with uncertainty has been proposed in this study. It is a very conservative method, especially suitable for situations in which it is difficult to bear any damage to a robot. In addition, this approach is a good choice for carrying out the task if the time is abundant. Simulation results and physical-world experiments have proved that with the proposed method, the robot performs well on finding the most reliable path. Whereas this does not mean that the proposed method is a panacea, it is not suitable for the situation that the time is pressing.
Footnotes
Author’s Note
Authors Botao Zhang and Yong Liu should be considered co-first authors.
Acknowledgment
This article is a revised and expanded version of a paper entitled A Strategy for Finding the Most Reliable Path in Uncertain Environments presented at The 2015 International Conference on Climbing and Walking Robots, Hangzhou, September 6–9, 2015.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Natural Science Foundation of Zhejiang Province (no. LQ14F030012), the National Natural Science Foundation of China (no. 61503108 and 61375104), the Zhejiang Open Foundation of the Most Important Subjects, and the National Natural Science Foundation Project of China (U1509210).