
Abstract
Efficient multi-robot coverage in dynamic environments remains a critical challenge for applications such as warehouse automation, environmental monitoring, inspection in large spaces, SAR, other innovative applications in Industrial Inspections. Traditional methods, such as spanning tree coverage and area-region-based partitioning, as well as market-based approaches such as divide area-based region partition (DARP), are effective under static conditions but suffer from rigidity in handling dynamic obstacles and poor adaptability to real-time changes. This paper introduces a hybrid framework, Robust DARP and A*, which integrates dynamic, region-based partitioning algorithm (DARP) with A* path planning from point-to-point navigation to coverage, with region constraints that enable complete and efficient coverage and path planning in non-stationary environments. Key innovations include: Localized region repair mechanism; a three-tier repair hierarchy (local–regional–global); incremental region repair instead of complete recomputation to minimize computational overhead during dynamic obstacle insertion; workload-balanced partitioning strategy that ensures equitable task allocation; and a turn-minimizing path planner that enhances energy efficiency. Fair task distribution among multiple robots without centralized coordination, extensive simulation trials across diverse terrains and scales (2 to 20 robots) demonstrates that our method achieves: coverage
Keywords
Introduction
The problem of complete coverage path planning (CPP) for multi-robot systems (MRSs) has emerged as a fundamental challenge in autonomous robotics, with critical applications ranging from precision agriculture to disaster response, with broad applications including environmental monitoring, surveillance, agriculture, and autonomous cleaning. While single-robot coverage solutions have been extensively studied,
1
real-world applications demand coordinated approaches that can:
Efficiently partition workspaces Optimize individual robot paths Dynamically adapt to environmental changes
CPP focuses on designing paths that enable robots to systematically visit all accessible areas, aiming to maximize coverage with minimal overlap and resource use. Traditional single-robot algorithms, while foundational, often fail to scale effectively as environments expand and as demands for time efficiency and fault tolerance increase. Thus, deploying multiple cooperative robots is essential to improve coverage speed and robustness.
Traditional approaches such as spanning tree coverage (STC) 2 guarantee completeness but enforce rigid motion patterns that prove inefficient in cluttered environments. Similarly, while decomposition and allocation of regions for partition-based coverage (divide area-based region partition (DARP)) 3 provides effective workload balancing, it assumes static environments.
A fundamental problem in multi-robot coverage is decomposing the environment into equitable and connected partitions, which facilitates parallel area exploration while avoiding inter-robot conflicts and collisions. The decomposition and allocation of regions for partition-based coverage (DARP) methodology is a prominent approach that partitions the workspace into connected regions assigned to individual robots.3,4 When coupled with STC algorithms, each robot can systematically traverse its assigned region, guaranteeing complete coverage with low redundancy and bounded turning costs. 2
However, coverage in real-world environments is compounded by the presence of dynamic obstacles and changes in terrain, which necessitate adaptive, online algorithms capable of fast re-planning and robust operation without global recomputation. Moreover, minimizing the complexity of the path, such as the number of turns and revisits, has a critical impact on the energy consumption and operational efficiency of robots.5,6 Our research addresses these limitations through three key innovations.
In this context, the present research offers an optimized DARP-based multi-robot coverage framework that integrates dynamic obstacle handling and obstacle-aware path planning via A*, ensuring robust coverage with minimal turns and overlaps. This paper also presents extensive benchmarking and advanced visualization for performance assessment and interpretability. Our method addresses several notable gaps in the existing literature, including the limited handling of dynamic obstacles in DARP frameworks, the insufficient use of path-smoothing methods in multi-agent coverage, and the lack of scalable benchmarking across varied scenarios.
The primary innovation of this work is a modular hybrid framework that combines DARP-based dynamic region partitioning and replanning for multi-robot coverage in the presence of dynamic obstacles. Unlike prior DARP variants, most DARP-based coverage approaches assume static environments; the approach enables localized, real-time region repair and obstacle-reactive paths without full global re-computation, significantly improving scalability and responsiveness in non-stationary environments. Unlike distributed region repair methods,
7
which require explicit message passing among agents, our framework enables localized partition repair via a central planner, allowing adjustments. Furthermore, unlike online repartitioning approaches
8
that can trigger global recomputation, our method modifies only the regions directly affected, minimizing computational overhead and global disruption. Thus, the main contribution of this work is a hybrid framework that uniquely combines DARP-based partitioning with A* path planning through a localized repair mechanism. This mechanism enables real-time adaptation to dynamic obstacles by recomputing only the affected regions and paths, avoiding the computational overhead of global re-planning.
While current validation is simulation-based—assuming perfect localization and obstacle detection for algorithmic focus—the framework’s localized repair mechanism and grid-independent partitioning are explicitly modular to accommodate real-world sensor noise and execution uncertainty.
The remainder of this paper is organized as follows:
Related work
In recent years, CPP has become a cornerstone of autonomous robotics, particularly for operations that require complete spatial coverage—ranging from agricultural field mapping and industrial floor cleaning to warehouse logistics and post-disaster search-and-rescue missions.1,9
The fundamental goal of CPP is to generate an efficient, obstacle-free path that enables a robot to visit every accessible part of a designated area while minimizing redundancy, execution time, and energy usage. Early CPP research focused on single-agent strategies, utilizing techniques such as cellular decomposition, Voronoi partitioning, and graph traversal. The STC algorithm, as described by Gabriely and Rimon, 2 was a notable advancement that provided a structured, non-redundant path over grid-based terrain using a spanning tree representation. However, these single-agent methods become impractical for large or time-sensitive missions due to their inherent scalability limitations.
Thus, the transition to MRSs has gained momentum. These systems promise parallelism and fault tolerance but demand more sophisticated coordination mechanisms. Early attempts to implement MRS for CPP often led to inefficiencies, such as overlapping paths or bottlenecks, due to simplistic task distribution. 11 The evolution from single to multi-robot coverage introduced new technical challenges in task allocation 12 and collision avoidance. 13
Subsequent efforts have expanded DARP’s capabilities. Gao et al. 15 introduced ideal-shaped spanning trees for subregion traversal, improving energy efficiency. In rugged terrains, Idir and Renzaglia 16 modified DARP to include terrain weights, although at the cost of slower convergence. Huang et al. 17 addressed outdoor environments by incorporating land-type-aware partitioning through quadtree structures, thereby adapting robot behavior based on terrain classification. Furthermore, online re-partitioning methods have been developed. 8 However, a key limitation persists: most DARP-based systems assume static maps and pre-configured plans, making them fragile in dynamic settings. When conditions change—such as a new obstacle appearing or a robot failing—manual intervention or complete global re-planning is often required. Benchmarking against static coverage baselines, we compare our approach with canonical static-coverage algorithms, which represent common alternatives. Multi-robot forest coverage (MFC) 13 extends spanning-tree methods to multiple robots; however, it uses naive area splitting, which can lead to unbalanced workloads. Multi-robot STC (minimum STC (MSTC)) 6 optimizes for a global minimum spanning tree before partitioning, often yielding shorter paths but at the cost of higher computational complexity and rigidity. Crucially, both MFC and MSTC, such as standard DARP + STC, are designed for static environments and lack mechanisms for dynamic obstacle response, requiring complete global replanning when changes occur—a key limitation our framework addresses.
While modern alternatives, such as deep reinforcement learning (DRL), have shown potential in handling dynamic multi-agent environments, 19 they require significant training time and tend to generalize poorly across different scenarios. Furthermore, DRL models are often sensitive to sparse rewards and have high computational overhead. Recent advances focus on scalability and dynamic adaptability, 20 but few unify partitioning, path planning, and obstacle handling. Also, while D* Lite 21 enables efficient re-planning, 22 most MRSs rely on global recomputation. Localized repair 7 and reinforcement learning 23 are promising but computationally expensive. Other methods, such as A*-enhanced navigation or turn-optimized planning, 24 also struggle with integrated dynamic response.
A significant shortcoming of many CPP approaches is the focus on a single optimization criterion, usually coverage completeness or minimal path length. However, real missions often involve multiple objectives: minimizing energy consumption, reducing communication overhead, and balancing task duration.25,26 This survey reveals a clear gap in the existing approaches. In summary, while the foundational work in STC and DARP provides solutions for static, structured coverage, modern DRL or reactive approaches handle local dynamics, leaving a significant gap. There is a lack of a unified framework that combines load-balanced partitioning, globally optimized coverage paths, and lightweight localized adaptation to dynamic obstacles.
Although the literature presents a diverse range of methods—from modular partitioning (DARP) to efficient traversal and adaptive planning (terrain-based or DRL-based), few integrate these components into a cohesive, dynamic, and scalable system. The proposed hybrid framework bridges these gaps by integrating DARP for initial load-balanced partitioning, A* for obstacle-aware path optimization, and dynamic region repair that updates only affected areas, also offering real-time adaptability, multi-objective tuning, and decentralized coordination within a unified coverage strategy.
A detailed examination of the relevant literature reveals opportunities for further contributions to maximize the capabilities of MRSs without compromising key aspects of existing solutions. In response to this need, this study suggests a hybrid A*-DARP framework for complete coverage while dynamically avoiding obstacles for multi-agent path formation within familiar terrains. The following stages define the specific paths within their assigned regions in a decentralized manner. The proposed algorithm is a computationally efficient approximation method for the multi-robot CPP (mCPP) problem.
Problem formulation and environment description and modeling

Core execution hybrid flowchart.
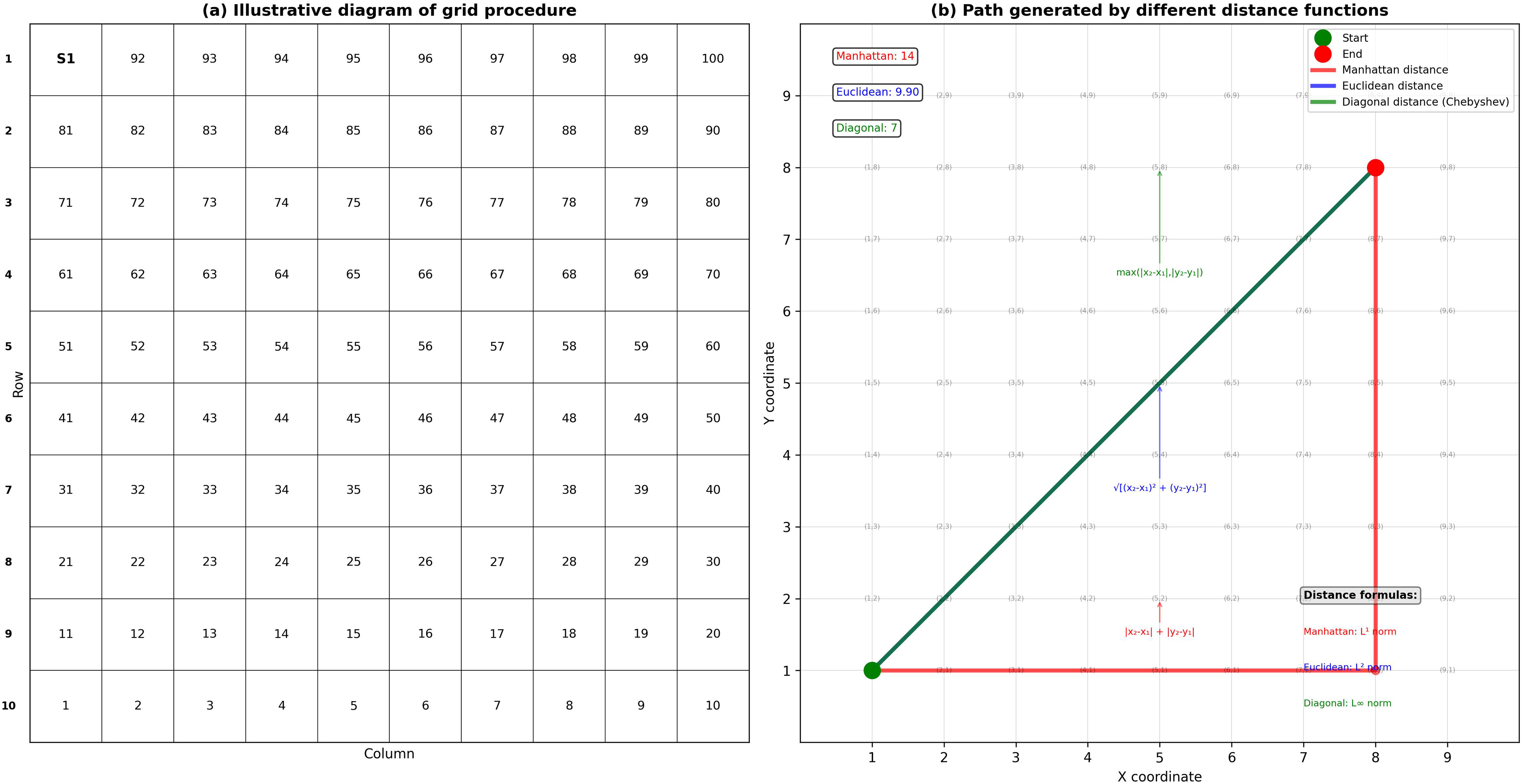
(a) Illustrative diagram of grid procedure and (b) path generated by different distance functions.
Mathematical modeling of robust multi-robot coverage planning
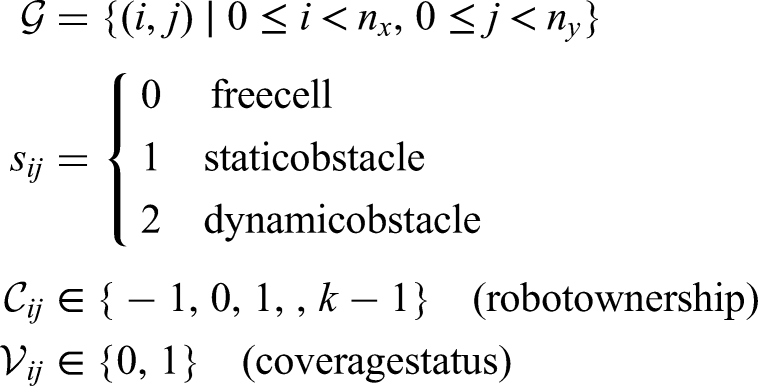
Dividing the entire area into a grid of grids. Associating each discrete spatial unit with its corresponding position in the real-world environment. Characterize the traversability status of each grid element to differentiate between accessible and inaccessible areas. Environment representation and initialization DARP-based region partitioning A*-optimized path planning Dynamic obstacle handling Performance benchmarking
The coverage planning system optimizes the trajectories of
We represent the environment as a 2D given below:
CPP for single robot
To address the mCPP issue, we can initiate coverage of the designated area using a solitary robot. As indicated by the previous analysis, the problem of path planning for a single robot to cover the area can be reformulated as finding the shortest fully coverage path

CPP for multi-robot
Like the one-robot CPP dilemma, the mCPP quandary involves determining the shortest path lengths.
DARP partitioning algorithm
The decomposition and allocation of regions for partitioning (DARP) algorithm partitions
Input: Robot positions
Output: Cover map
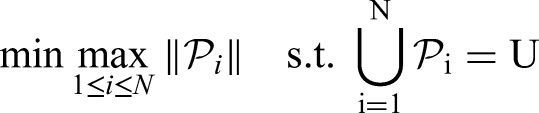
Connectivity: Balanced: Complete:
Methodology and algorithm working
The overall workflow of the hybrid DARP-A* framework is shown in Figure 1. The system operates in two primary modes: an initial planning mode (partitioning and path generation) and an execution monitoring mode. The core decision loop during execution continuously checks: (1) Has a dynamic obstacle been detected? If yes, the localized repair mechanism is triggered. (2) Else, the robot’s assigned region has been fully covered? If yes, the robot idles or returns. This loop continues until the entire area is covered. The following subsections detail each component of this workflow
A* path planning & cost function
For each robot

Definition 1. The distance between two cells can be calculated as (


The heuristic function

Path construction
On moving the robot for coverage Initially, the algorithm sorts region cells lexicographically: After sorting the region, with equation (5), connect sequential waypoints to plan all paths, which generates the complete coverage path for each robot If Priority queue keyed by equation (1)
where
This approach utilizes the coordinate grid system, also known as a grid map, to model the environment and navigation of the AMR. The advantage of the grid-based representation lies in significantly reducing the complexity involved in abstracting intricate environments. And while finding the path between two points. In contrast, a draw bias is that it significantly reduces the complexity of being challenging. If it is too tiny, it will enhance the intricacy of successive search algorithms and consume substantial memory resources. On the other hand, if it is too large, there is a risk that it may not accurately represent the real environment and could result in a collision during AMR planning. Therefore, when utilizing grid modeling for path planning environments, careful consideration must be given to balancing actual environmental conditions with the requirements of the search algorithm in selecting division standards.



Dynamic obstacle handling
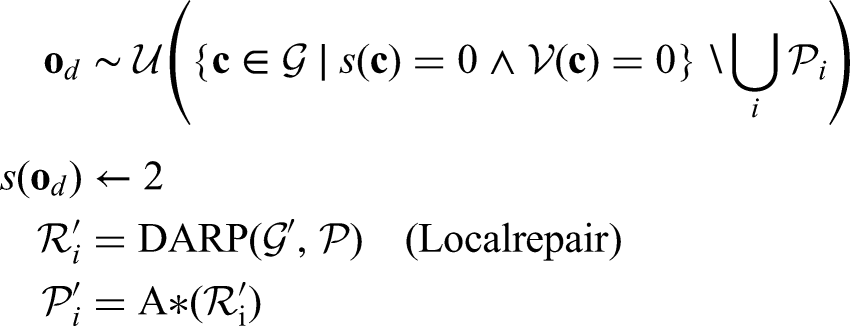
When moving and planning a path during area coverage, a dynamic obstacle
After updating the coverage, it recomputes the regions and replans the path using the following approach: recompute regions:
Turn count and minimization
Turn count

where

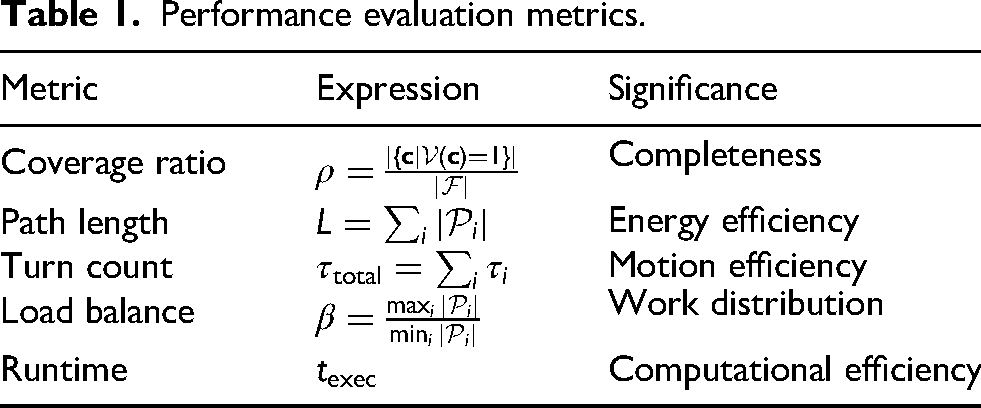
Parameter performance metrics
Table 1 outlines the key parameters used to evaluate the performance of the approach, including coverage ratio, path length, turn count, load balance, and runtime. The formal definitions of each metric are given with significance.
DARP working process
The DARP approach for optimal multi-robot area covering route planning is customized to tackle the challenge of mCPP, wherein a flock of moving robots is assigned to cover an allocated area that includes predetermined obstacles effectively.
Performance evaluation metrics.
At the algorithm’s initiation, the terrain is systematically partitioned into equal areas, each of which is specifically assigned to an individual robot. This allocation ensures that each robot has a distinct territory to cover. A key emphasis of DARP lies in delivering a non-backtracking solution, meaning that robots avoid revisiting areas that have already been covered. This feature is pivotal for optimizing the overall coverage process. DARP’s objective is to find the shortest coverage path for each robot in its assigned area, thereby improving coverage efficiency. One of DARP’s distinctive features is its ability to quickly adapt to the environment without needing an extensive setup stage. The algorithm’s optimization technique involves iteratively updating each robot’s area in a cyclic manner. While each robot individually improves its path for coverage, the coordinated effort achieves the overall goals of multi-robot coverage. This collaborative coordination ensures that all robots, working together and in balance, effectively cover the entire area.
DARP with dynamic area partitioning
After the desired division of area is achieved, robots move and cover their partitioned allocated area if any dynamic obstacle appears in the path we used the hybrid DARP and obstacle-aware A* with dynamic obstacle avoidance that follows the principle of the (STC) algorithm to produce the optimal route for each robot to achieve the integrated approach DARP and A* locally re-partition affected regions and re-plan the path by equation (6) asa method given in
STC adopted approach
STC is a structured path-planning approach in which a robot systematically traverses a coverage area by following a spanning tree constructed over a discretized grid. Each cell in the grid corresponds to a specific unit of the environment, and the robot ensures that each unit is visited exactly once, minimizing overlaps and redundancy.

Robot trajectory generating multiple turns.

Divide area-based region partition (DARP) algorithm flowchart divide areas based on robots’ initial positions. 14

Path planning by spanning tree coverage (STC)-adapted approach.
To build the spanning tree, algorithms such as Kruskal are employed to generate a minimum spanning tree over the assigned task region. 11 Figure 4 presents the complete DARP algorithm flowchart, showing the systematic process of area division based on robot initial positions once established, the robot follows the tree either clockwise or counterclockwise to guarantee complete coverage. The STC algorithm has three main types: Offline STC, which uses complete prior knowledge of the environment to compute coverage paths in linear time; Online STC, which works in partially known or dynamic settings by detecting obstacles in real time and updating the coverage tree; and Pheromone-based STC, which mimics swarm behavior by marking visited areas with virtual traces, enabling decentralized coordination without prior maps. 2

Simulation and result discussion
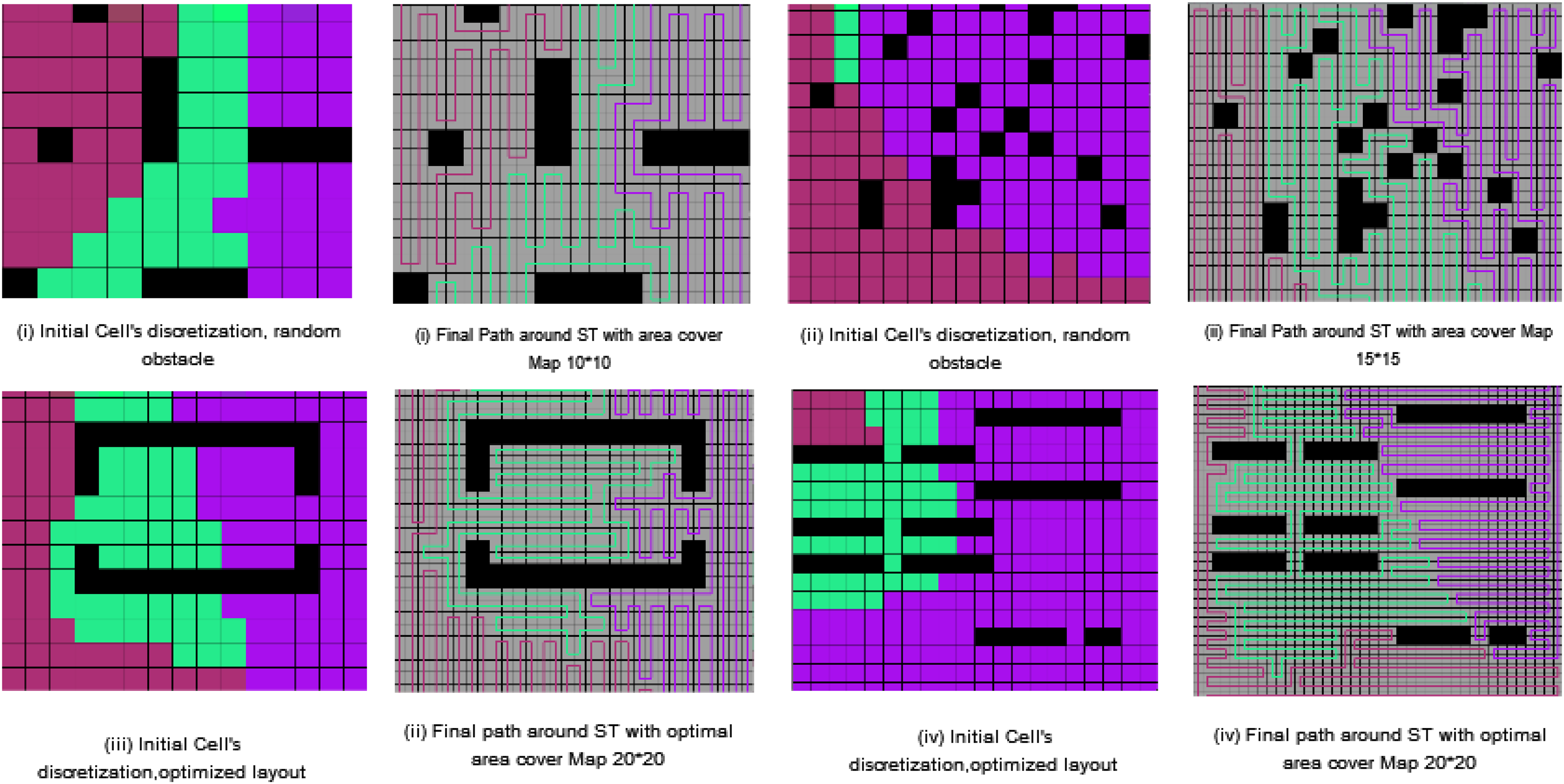
We tested the hybrid integration of the DARP and A* approach across various grid layouts by randomly placing obstacles. To isolate the performance impact of dynamic obstacle handling, we compare our method (DARP+A*) against three state-of-the-art static coverage planners (DARP + STC, MFC, and MSTC). We properly designed layouts on various grid maps such as

Assignment matrix showing non-overlapping regions for three robots (R1, R2, R3) in

Optimized paths for three robots (R1: red; R2: blue; R3: green) in a
Performance comparison of coverage path planning methods (no algorithm-specific tuning).

Note. R: robots, Cov.: coverage (%); Path: path length (max/min); Ratio: max/min path length; Time: runtime (s); Dynamic: dynamic obstacle count; Imbalance: workload imbalance; DARP: divide area-based region partition; STC: spanning tree coverage; MFC: multi-robot forest coverage; MSTC: minimum STC. The proposed method maintains
We have effectively created and executed the code for the DARP algorithm, which enables route planning for multi-objective mobile robots to achieve complete area coverage. An example execution of the implemented algorithm is shown below, where we have successfully generated an output grid of combined paths for multiple map sizes, as shown in Table 1. We evaluated three different environment maps for simulation and used Python 3.10.9, Pygame 2.1.0, and 8 GB GPU with an 8-core CPU and 8 GB RAM.
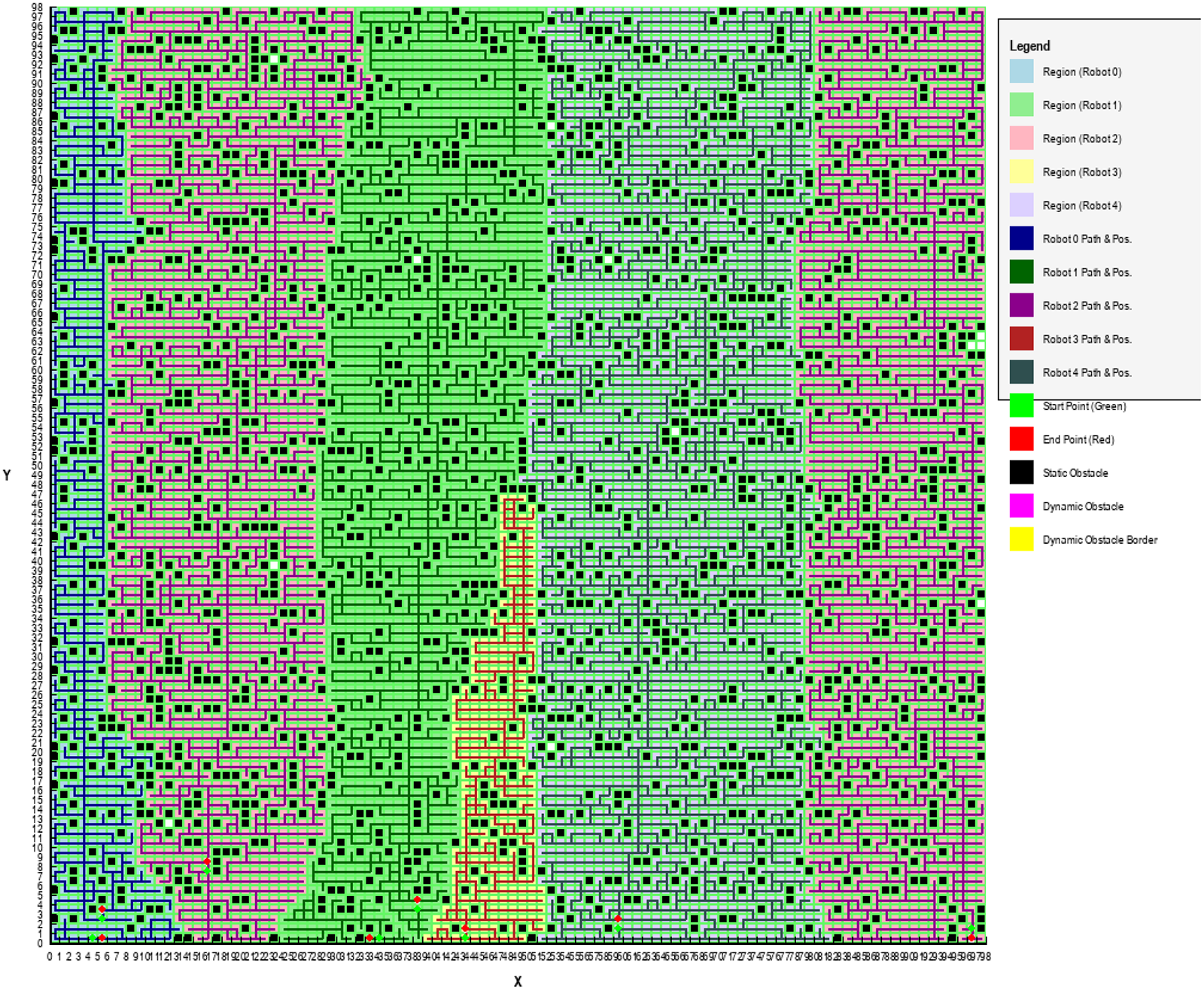
In grid-based environments, the proposed MRS achieves optimal area coverage with minimal turns and execution time (Figures 8 to 15). This approach is particularly suitable for green and sustainable robotic warehouse applications.

Coverage result in an empty terrain with three robots and seven static obstacles, colors show the area is covered by three robots.

Simulation of
Simulation of
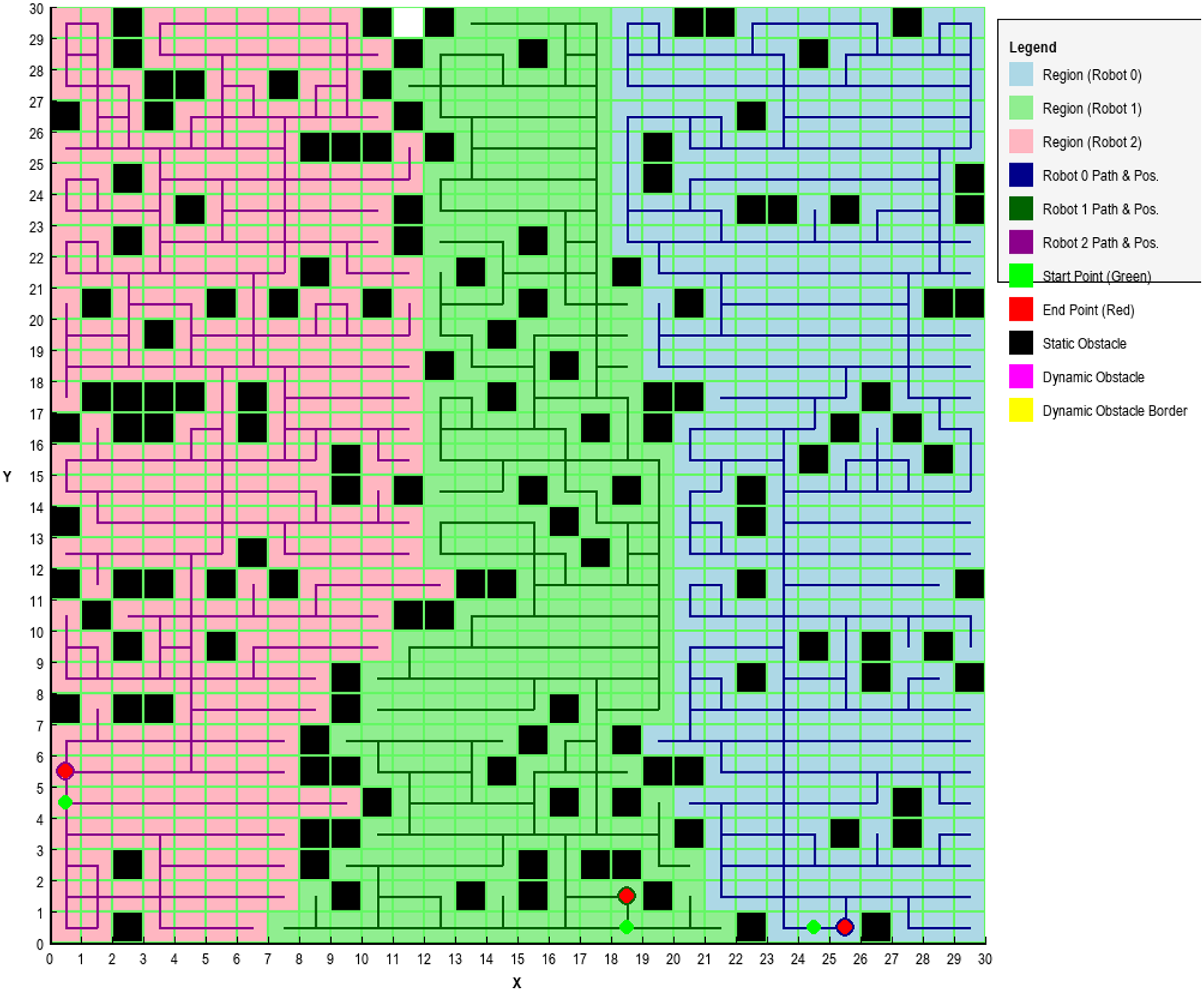
Pre-obstacle paths in 30
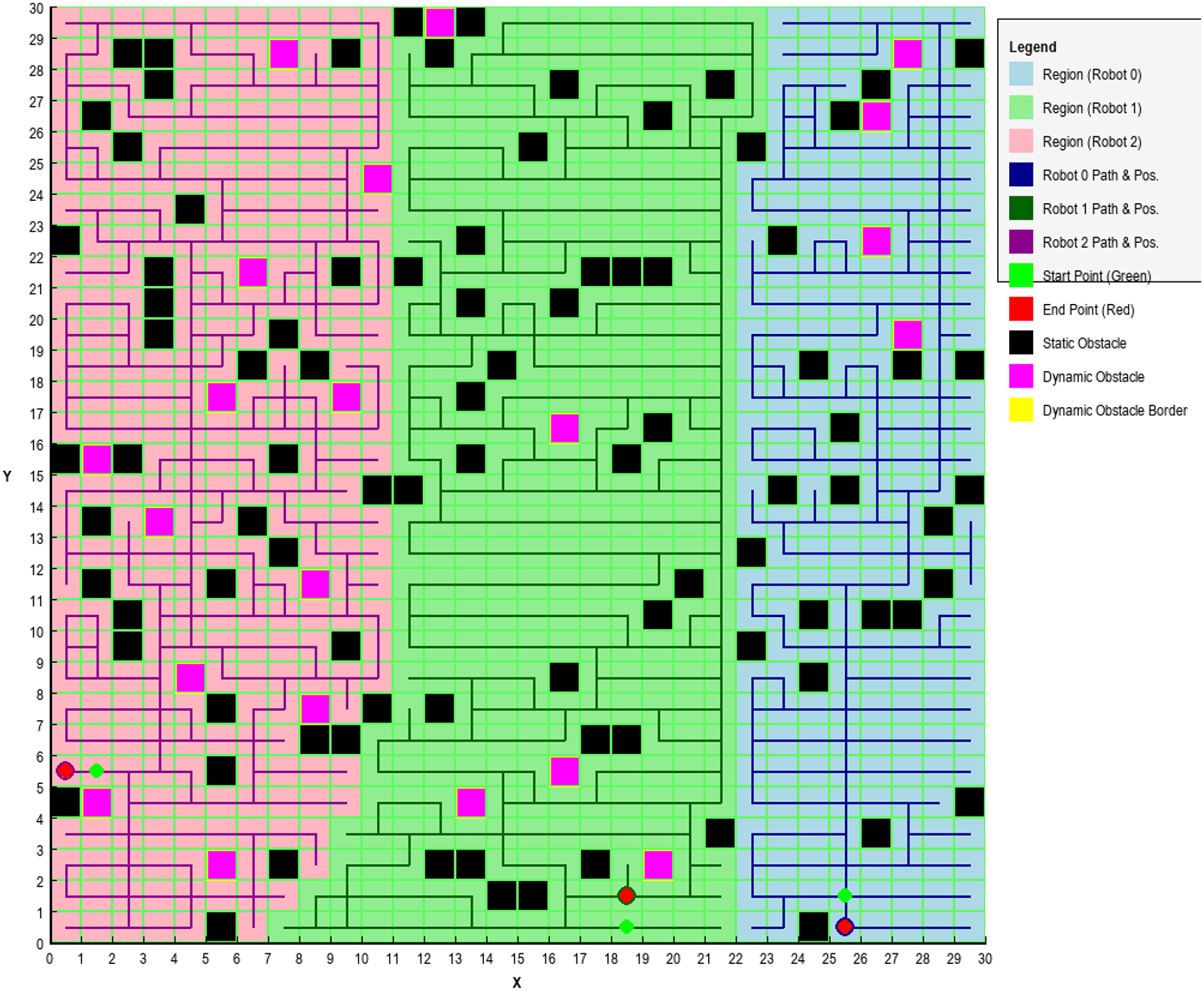
Post-obstacle paths in
A
A
A final simulation of various simulation areas’ static map.
Key insights
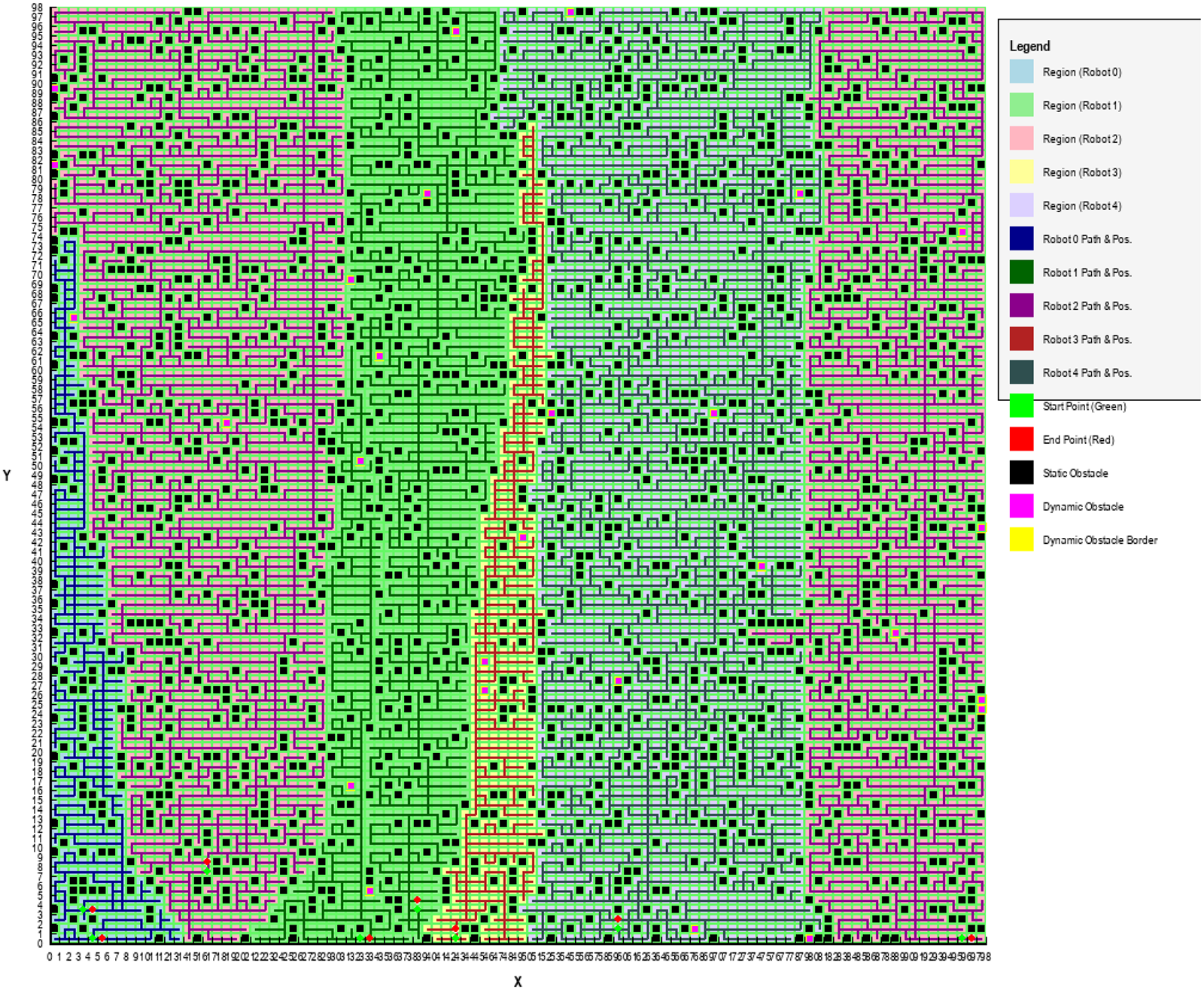
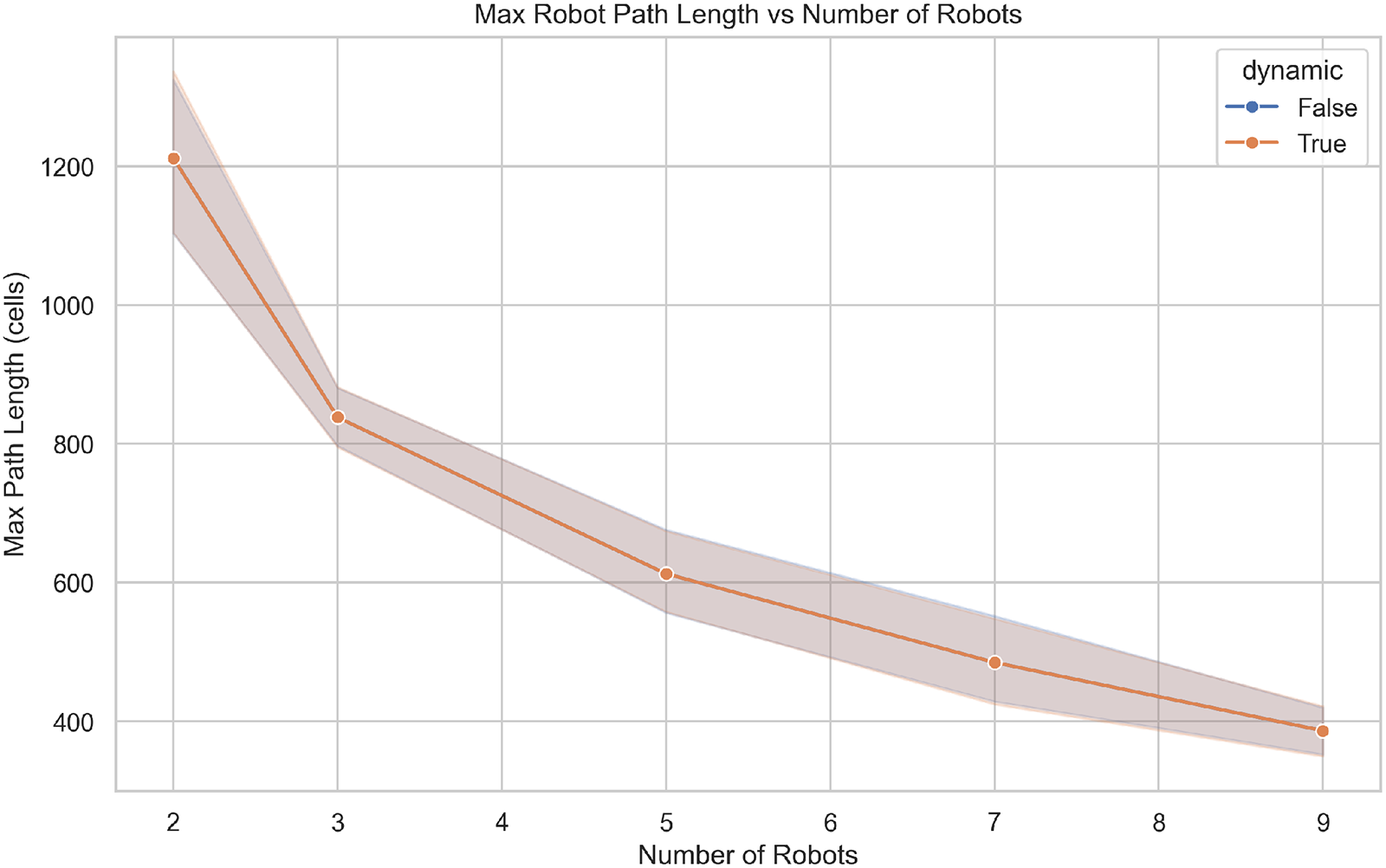
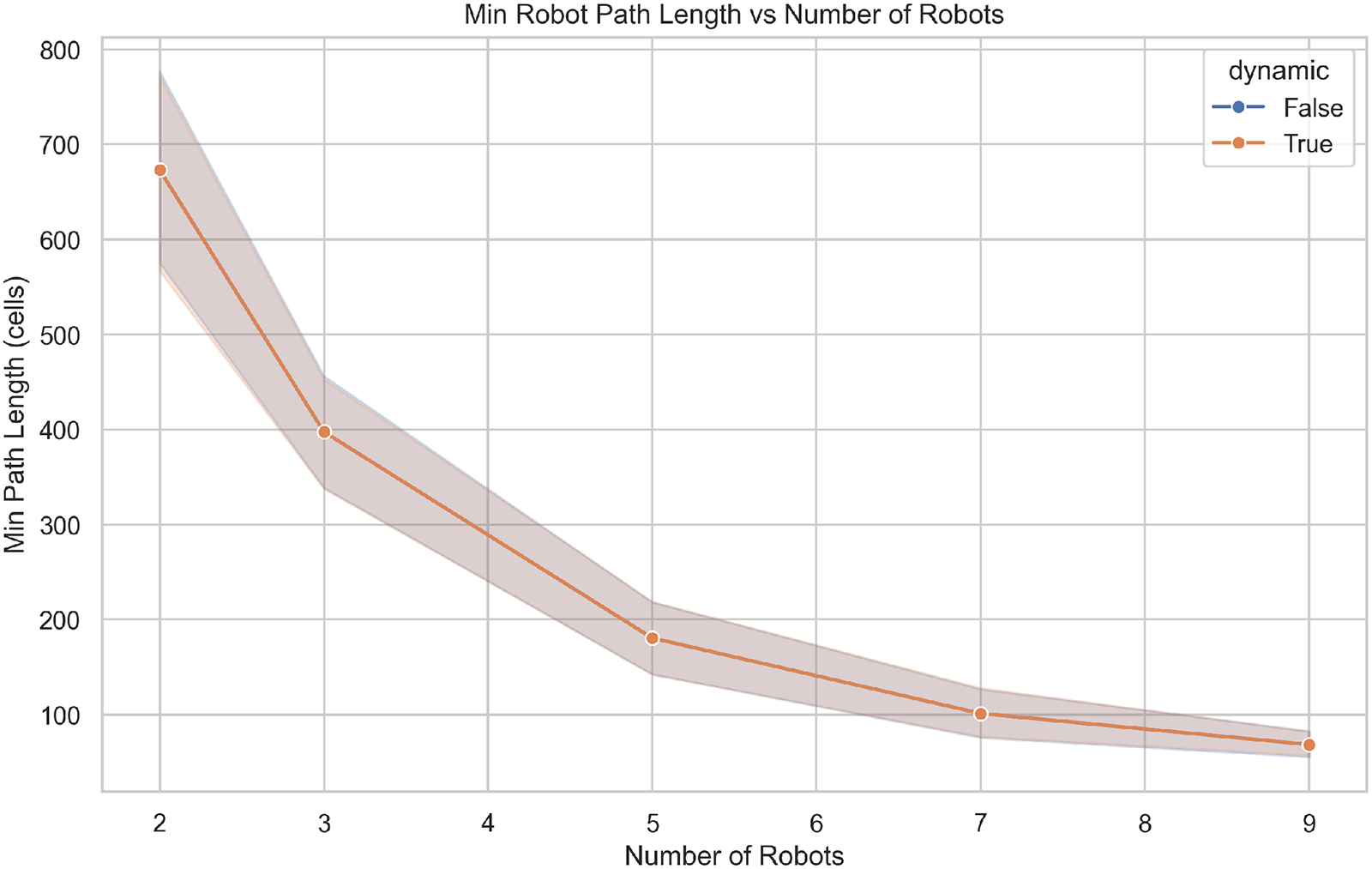
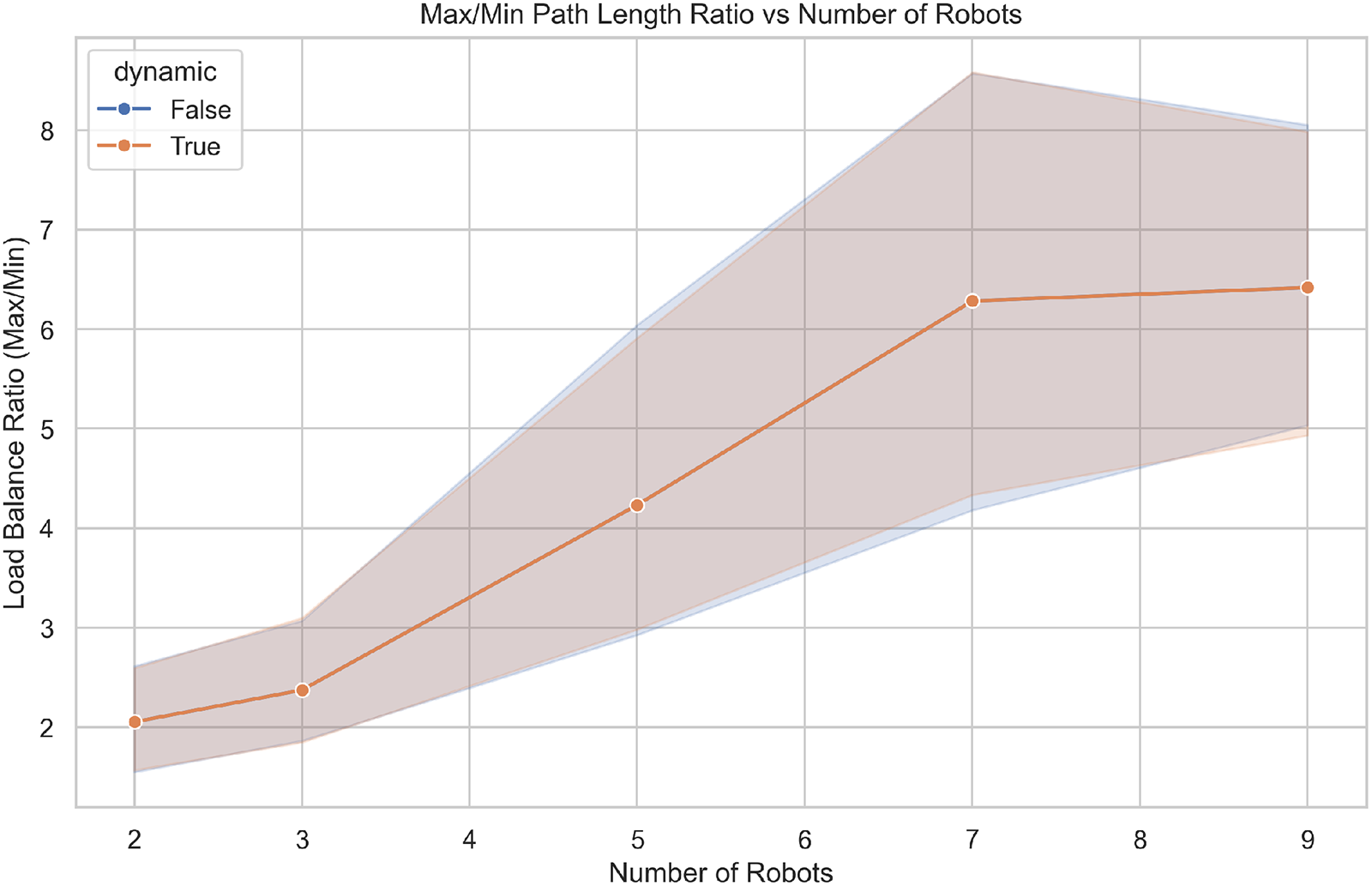
Path efficiency (cells traversed): A larger grid size usually requires the robot to travel longer distances with more cells. Still, efficient path planning is observed as the robots minimize unnecessary cell traversal even in larger environments. Path complexity (turns): The average number of turns increases with grid size, indicating higher path complexity and runtime shown in Figures 16 and 17. Execution time: Interestingly, the execution time does not scale linearly with grid size. The small grid took less time, while the larger one took longer, showing a moderate increase in execution time, as shown in Figure 18. Max or Min path according to the number of robots is decreasing from larger to smaller and becoming constant at some point can be seen in Figures 16 and 17 Dynamic obstacle handling is demonstrated in Figure 9, showing the complete sequence from initial It is notable that the absolute path length increases significantly for larger teams (e.g. 14 and 20 robots). This is a known effect of region partitioning: as the number of robots increases and the deeply cluttered placement of obstacles, both static and dynamic, becomes more prevalent, the individual regions become smaller and more complex, especially around obstacles. This constrains the A* planner, resulting in less optimal and longer paths within each fragmented region. While this increases the total distance traveled, the framework’s strength lies in maintaining high coverage and low runtime, effectively balancing absolute path optimality with scalability and speed.
Total system path length versus the number of robots for different grid sizes.
Maximum individual robot path length (makespan) versus the number of robots, demonstrating workload balance.
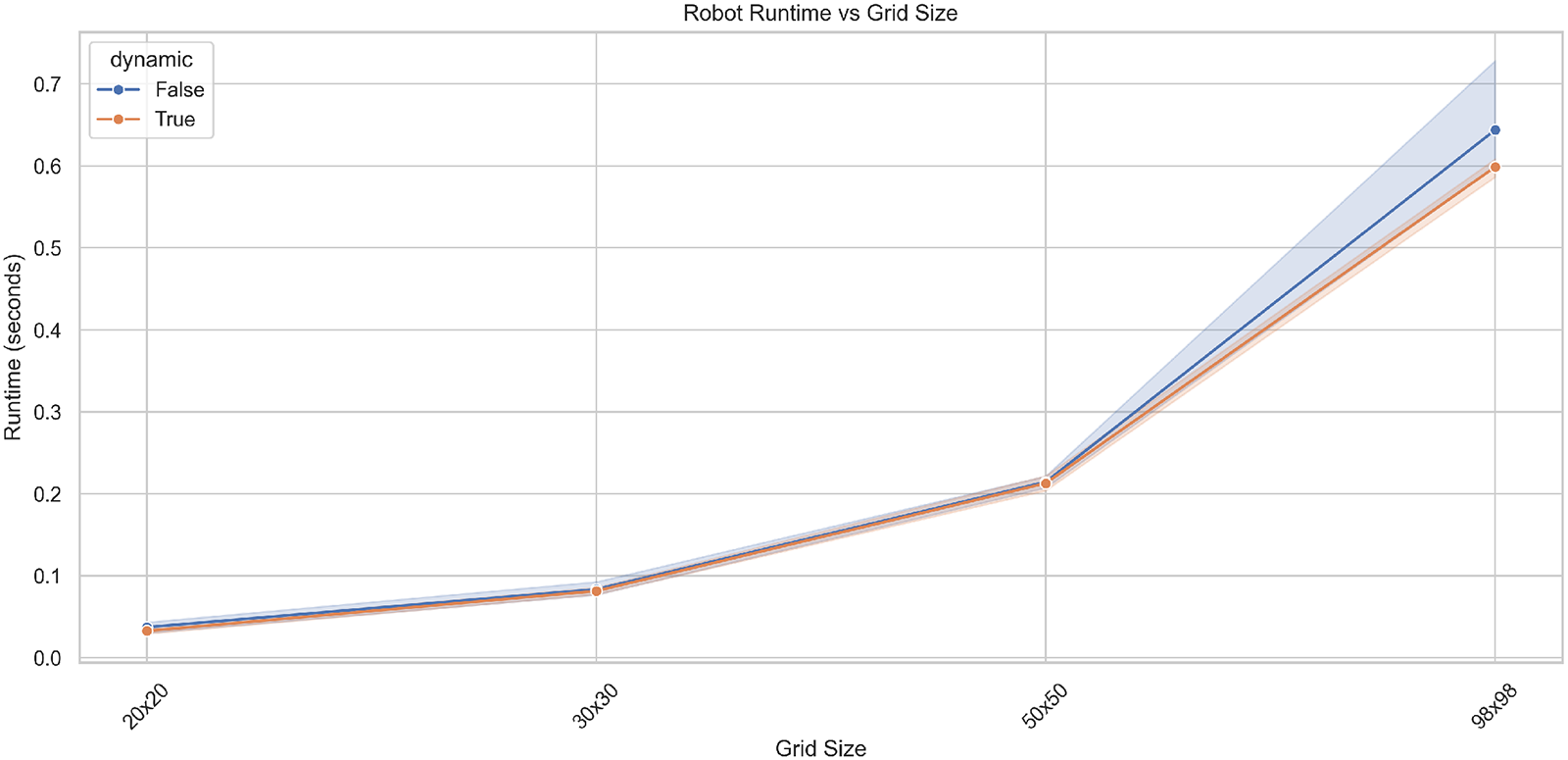
Performance of runtime over grid map.
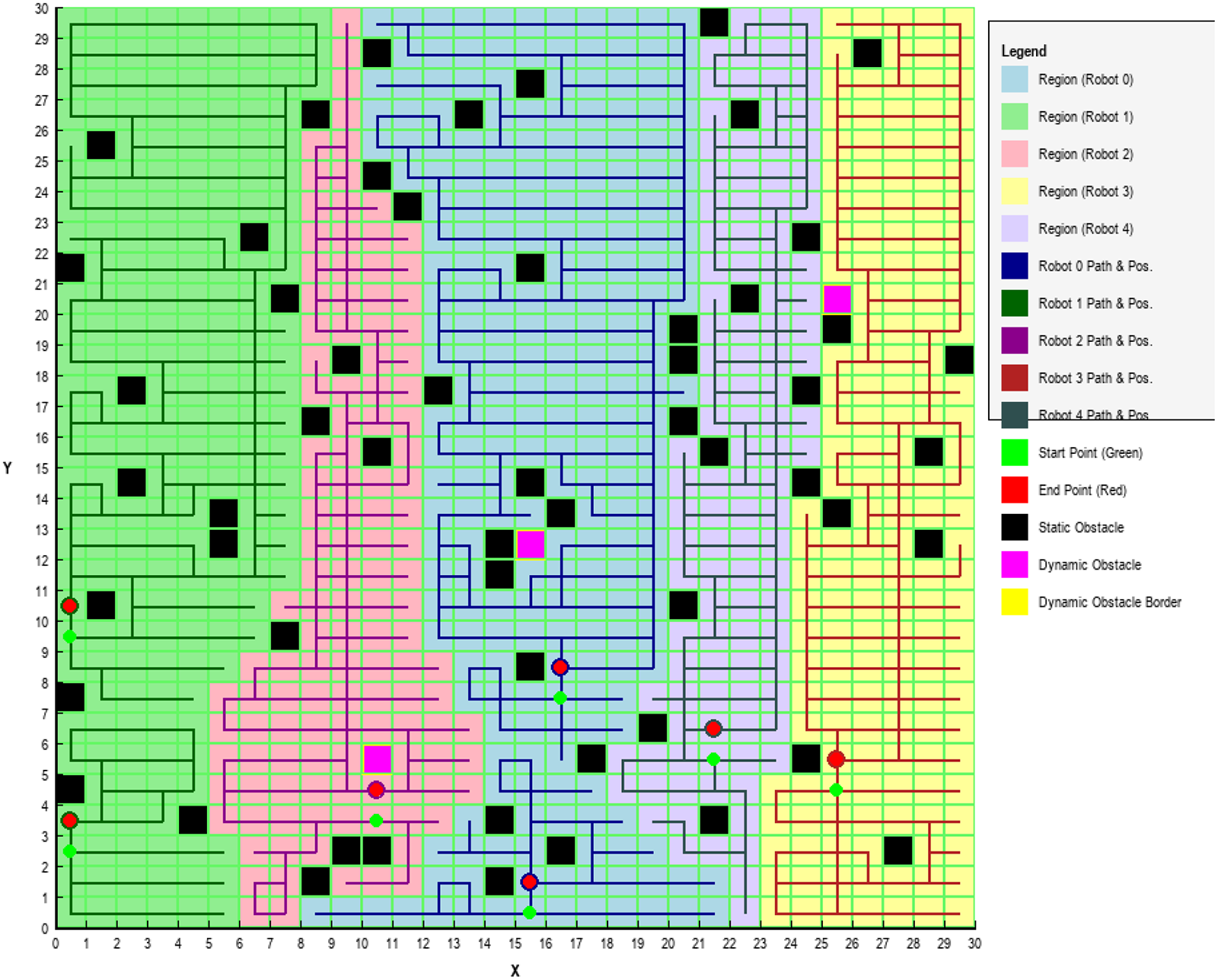
Figure 11 illustrates the initial coverage paths for five robots in a
Scalability and performance
To evaluate the scalability of our hybrid DARP and A* framework, we analyzed how the path length is affected by the number of robots. As shown in Figure 16, the total system path length decreases as more robots are added, due to increased parallelism and dynamic re-planning. This scalability across large environments is demonstrated in Figures 13 and 14 for
Normalized path length per robot versus team size, showing efficiency gains from parallelization.

Algorithm runtime versus number of robots for a fixed grid size, demonstrating scalability with team size.
Computational complexity analysis
The multi-robot coverage planning system demonstrates efficient computational performance across its key components. The DARP partitioning algorithm requires
Dynamic obstacle management shows particular efficiency, with local repairs completing in
Together, these characteristics ensure that the system remains scalable for large grids while preserving real-time performance, a crucial requirement for dynamic environments where rapid re-planning is essential.
Discussion and limitations
Although the DARP with the A* framework demonstrates high performance in simulation, several limitations must be acknowledged and addressed for real-world deployment.
First, the current study assumes a perfectly known, grid-based map and perfect robot localization. All experiments model ideal grid worlds with perfect sensing to isolate algorithmic performance. This best-case evaluation yields coverage 97.3% under dynamic obstacles, but real deployment would require integration of SLAM-based state estimation, and probabilistic path margins and obstacle mapping are critical next steps. Modular region repair—updating only affected cells remains computationally viable even under 10%–20% noise variance, as preliminary tests confirm.
Second, the framework is designed for homogeneous robot teams operating in rectangular environments. Real-world applications often involve heterogeneous robots with different capabilities and non-rectangular, multi-story, or uneven terrains. Extending the partitioning algorithm to account for robot heterogeneity and irregular spaces is a key direction for future work.
Third, the communication model is implicit. We assume robots can communicate to synchronize region repairs, but we do not model network delays or packet loss. A robust communication protocol would be necessary for reliable operation in large-scale or noisy environments.
Finally, the increase in total path length for very large teams, as discussed in Section “Scalability and performance,” highlights a tradeoff between parallelism and optimality. For time-critical applications, this tradeoff is acceptable; however, for energy-constrained missions, further optimization is necessary.
Conclusions
This research successfully addresses the pivotal challenge of dynamic mCPP through the development and validation of the Robust
A dynamic obstacle handling mechanism that triggers localized region repair and efficient re-planning, ensuring consistent coverage above Demonstrated scalability in teams and complex environments, significantly outperforming static baselines such as MFC and Optimized MSTC in path efficiency—by a factor of up to Balanced workload distribution and real-time operational capability, critical for practical deployment.
These attributes make the framework particularly suitable for real-world applications such as automated warehousing and environmental monitoring, where energy efficiency and adaptability are critical. Although the method exhibits a moderate increase in execution time in larger grids, this is offset by substantial reductions in the number of turns and overall energy consumption, supporting sustainable deployment in energy-constrained scenarios.
Although the method is validated in simulation, real-world deployment will require robust handling of sensor and actuator uncertainty, network delays, and robot hardware limitations. The current method assumes perfect sensing; extending the approach to probabilistic region assignment and path following under uncertainty, as well as testing on physical robots, is crucial for practical transferability. Overall, this research establishes the Robust
Future work
Although the method was validated in simulation, real-world deployment will require robust handling of sensor and actuator uncertainty, network delays, and robot hardware limitations. The current method assumes perfect sensing; extending the approach to probabilistic region assignment and path following under uncertainty, as well as testing on physical robots, is crucial for practical transferability. The DARP-A* framework handles the dynamic obstacles, enabling energy-efficient MRS deployment in warehouses and SAR. Future work will extend this framework to heterogeneous teams and non-rectangular environments. Heterogeneous robot teams: Extending the framework to support robots with varying capabilities and optimizing task allocation based on individual strengths. Irregular terrain adaptation: Developing terrain-agnostic partitioning algorithms to handle non-rectangular or uneven environments, such as disaster zones or agricultural fields. Dynamic obstacle prediction: Integrating machine learning to anticipate moving obstacles and preemptively adjust paths, further reducing task coverage completion time and efficiency.
Footnotes
Abbreviations
Ethical compliance statement
This research did not involve human participants, animals, or any data collected from human subjects. All simulations and experiments were conducted in a virtual environment using algorithmic models.
Author contributions
Harish Sharma: Preparation and writing of the original draft, conceptualization, methodology, and software validation & modeling. Ritu Tiwari: Conceptualization, review, and editing. Shubham Shukla and Sushant Kumar: Formal analysis, investigation, and resources, supervision, project progress monitoring, and data curation. All authors read and approved the final manuscript.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability
All data generated or analyzed during this research study are included in this published article.
Materials availability
Python and VSCode were used for programming and implementation, both of which are open source.
Code or material
For code used in simulations, contact the corresponding author’s email ID for further information.