
Abstract
This study addresses the limitations of conventional pneumatic soft grippers—restricted grasping versatility and compromised stability when handling irregular/massive objects due to insufficient structural stiffness—by proposing an electroadhesion-enhanced dual-pneumatic network (EDP) gripper. The innovation lies in a structurally optimized dual-pneuNet two-finger architecture, integrating slow pneumatic networks for rigidity and fast pneumatic networks for deformability. Key chamber parameters were optimized via Abaqus to enhance stiffness and grasping stability. The design further incorporates a COMSOL-optimized flexible electroadhesive film, enabling multimode grasping (pneumatic fingertip/enveloping, electroadhesion-based, and hybrid modes). Experimental results demonstrate the EDP gripper's ability to stably and adaptively handle fragile, flat, deformable, irregular, and asymmetric objects across diverse hardnesses, sizes, and masses. This synergy of structural optimization and electroadhesion advances soft robotics toward versatile, high-performance manipulation.
Introduction
A soft robot is a novel electromechanical integrated intelligent system characterized by the high integration of the body, actuation, and perception. 1 Unlike conventional rigid robots composed of hard components such as rigid joints, hinges, and electric motors, soft robots are generally made of soft materials driven by gas or liquid fluid, or intelligent materials such as shape memory alloys (SMAs) and dielectric elastomers as actuators, and flexible, high-sensing density detection devices as environment and body state perceptors.2,3 Therefore, soft robots exhibit higher flexibility, safety, and adaptability than rigid robots, and thus have significant application prospects in fields such as biomimetic structures, grasping operations, and medical rehabilitation. Soft manipulators used for grasping operations can change their own shape according to the shape and size of the grasped objects, and exhibit significant advantages over rigid manipulators when grasping objects with complex, irregular, soft, and fragile shapes.
Currently, pneumatic, rope, smart material, and electromagnetic actuation are prevalent methods for soft manipulator actuation. 4 By combining soft materials, underactuation mechanisms, and bioinspired design, Manti et al. 5 developed a rope-actuated three-finger soft manipulator capable of extending and bending by controlling the tension of ropes installed on both sides of the fingers; experimental verification demonstrated the manipulator's stability and self-adaptability in grasping objects. She et al. 6 developed an SMA-driven 7 soft manipulator in which SMA is embedded into fingers made of soft materials, with pulse width modulation signals used to control SMA contraction, further driving finger bending. This design enables the soft manipulator to achieve maximum bending angles for the thumb, index finger, and middle finger, similar to human fingers, allowing it to assist with daily grasping actions. Lau et al.8,9 developed a soft manipulator using a dielectric elastomer, featuring an arched bending element to prestretch the elastomer actuator into an arch shape, thereby amplifying tension and achieving a bending angle of nearly 90° to enhance grasping performance. Lievski et al. 10 designed a six-chamber soft manipulator using an embedded pneumatic grid method, with the upper layer of soft fingers comprising wrinkled air chambers and the lower layer a less elastic flat layer. Air pressure applied to the manipulator causes the flat layer to restrict upper layer expansion, resulting in finger bending and grasping. Deimel et al. 11 proposed a five-finger pneumatic soft manipulator characterized by fibers wound around the air chambers in a double helix crossover pattern to reduce axial expansion. Gas pressure control allows the manipulator to perform grasping, holding, twisting, and gripping actions. Wang et al. 12 reported a prestressed four-finger pneumatic soft manipulator with a special fabrication process that imparts prestress, widening the initial finger opening and increasing the contact area with the grasped object, thereby enhancing grasping stability. Li et al. 13 introduced a particle-filled pneumatic manipulator with soft fingers comprising an upper cavity and lower cavity made of silicone. When the lower cavity is inflated, it expands and compresses the upper cavity, causing particles to block the upper cavity, leading to finger bending and increased rigidity, which enhances grasping force. Hao et al. 14 proposed a symmetric two-finger pneumatic soft manipulator capable of mimicking the segmented bending of human fingers. The two fingers bend cooperatively to achieve the pinching action of the index finger and thumb. Additionally, a fingerprint structure was designed at the front end of the fingers to increase surface roughness, enabling the manipulator to grasp objects with mucosal surfaces.
Among the previously mentioned driving methods, the pneumatic-driven soft manipulator stands out as the most widely used due to its significant advantages, including substantial deformability, high output force, fast response speed, excellent human–machine interaction, and ease of measurement and control. Nevertheless, current pneumatic-driven soft manipulators predominantly operate in a single grasping mode, making it challenging for them to effectively grasp small delicate objects, flat objects on a plane, and flexible or easily deformable objects without causing distortion or damage. To address this limitation, some researchers have proposed integrating electroadhesion technology with soft manipulators. Specifically, the conductive electrodes of electroadhesive films, when connected to a high voltage, generate a strong electric field that polarizes the surfaces of the target object, thereby creating bound charges. The charges on the high-voltage electrodes then interact with the bound charges via the electric field, enabling adhesion. Electroadhesion is suitable for a wide range of materials (e.g., conductors and insulators), causes no damage to the surfaces of adhered objects, and is characterized by low power consumption, minimal noise, and strong controllability. As a result, it has been widely employed in the grasping and manipulation of objects.
Guo et al. 15 proposed an electroadhesion-enhanced single-pneuNet soft manipulator. By integrating electroadhesive films with a two-finger pneumatic soft gripper, this manipulator can pick up and place flat and flexible materials, as well as fragile objects. Chen et al. 16 reported an electroadhesion-enhanced biomimetic fin-like soft gripper capable of grasping items such as acrylic balls, fabric, and paper with diameters larger than the total length of the gripper. Missimiliano Mastrangelo et al. 17 designed an electroadhesion finger capable of wrapping around objects with varying materials and geometries. The wrapping angle can reach up to 90°, and the finger can adapt to any shape, lifting objects up to 1000 times its own weight. Vito Cacucciolo et al. 18 investigated the effect of the peeling angle of the electrostatic adhesion film on the peeling force. Chaoqun Xiang et al. 19 developed a soft biomimetic gripper that combines variable stiffness with electrostatic adhesion capabilities. This gripper can simulate the bending and deflection movements of human fingers. Yegor Piskarev et al. 20 developed a soft gripper that combines particle gripping with electrostatic adhesion. The gripper offers multiple grasping modes and is capable of handling objects with various shapes (e.g., circular, flat) and different surface conditions (e.g., oily, wet, rough). The combination of the aforementioned electrostatic adhesion technology and soft grippers enables the grasping of small objects, flat objects on planes, and flexible or easily deformable objects without twisting or damaging them.
However, challenges related to stiffness and stability remain. When the shape of the grasped object is irregular or its mass is relatively large, the manipulator may fail to maintain a stable adsorption or grasping posture due to insufficient stiffness or a decline in adsorption force after extended use. Zhang et al. 21 proposed a soft actuator featuring a dual-module composite structure (slow pneumatic network (SPN) and fast pneumatic network (FPN)), which respectively enhance the output force and maintain the bending deformation capability, thereby improving the overall stiffness of the gripper. Xuyang Zhang et al. 22 proposed a soft gripper integrating a bioinspired optical tactile palm. The grasping stability is achieved through a hierarchical material strategy: the pneumatic silicone fingers with Shore A 30 hardness balance compliant adaptation and actuation rigidity, the gel-filled Agilus30™ tactile interface ensures high-fidelity contact perception, and the rigid PLA/nylon base provides structural support. Enhancing pneumatic gripper finger stiffness can be achieved through three approaches: structural optimization employs dual-module pneumatic networks (e.g., SPN and FPN) for topological innovation, balancing output force with bending compliance via modular control; material replacement adjusts silicone hardness but is constrained by material property limits; pressure adjustment increases rigidity through high pressure yet introduces energy and sealing challenges. Among these, structural optimization outperforms others by leveraging topological innovation to enable dynamic rigidity-flexibility coupling under low pressure, offering superior adaptability, safety, and lightweight design compared to material substitution or pressure-based solutions.
This study proposes an improved electroadhesion-enhanced dual-pneuNet (EDP) biomimetic two-finger soft gripper, which integrates a dual-pneuNet structure with an extendable, flexible electroadhesive film. The gripper combines the advantages of pneumatic soft manipulators—high adaptability to grasped objects, rapid deformability, and nondamaging grasping—with those of electroadhesion-based grasping, including wide adaptability, low power consumption, low noise, light weight, and cost-effectiveness. The proposed EDP soft gripper enables multimode grasping, including enveloping and fingertip grasping in the pneumatic mode, adhesion grasping in the electroadhesion mode, and electroadhesion-enhanced pneumatic enveloping grasping. Compared to conventional pneumatic manipulators, the EDP soft gripper demonstrates higher self-adaptivity and faster response speed. Moreover, it addresses the challenges faced by conventional pneumatic soft manipulators in grasping soft, flat, and easily deformable objects, while overcoming the limitations of electroadhesion-based manipulators in handling heavy objects.
Design and optimization
Structural design
The soft two-finger gripper adopts a combined structure of an SPN and an FPN. As shown in Figure 1(a.i), both the SPN and FPN consist of an upper extensible layer and a lower nonextensible layer, as originally proposed by Harvard University. 23 The SPN exhibits high pressure-bearing capacity, increased rigidity, and strong resistance to interference or deformation, while the FPN is characterized by a large bending angle, fast bending speed, and strong enveloping capability. Based on the grasping characteristics of human fingers, the roots of the fingers require substantial rigidity to maintain stability during object grasping. In response to this, the SPN is employed at the roots of the soft fingers to prevent the electroadhesive film mounted there from losing its electroadhesion effectiveness due to significant deformations of the mounting base. Conversely, since the fingertips require greater deformability for object grasping and enhanced enveloping capability, the FPN is utilized for the fingertips of the soft fingers.

Schematic of the EDP biomimetic soft gripper design. (a.i) SPN and FPN. 23 (a.ii) Structure of dual-pneuNet soft two-finger gripper. (b.i) Schematic of electroadhesion principle. (b.ii) Structure of flexible electroadhesive film. (c) EDP biomimetic soft gripper model.
The proposed soft two-finger gripper features a symmetrical integrated structure, as shown in Figure 1(a.ii). Smooth and uniform arcs connect the walls of each air chamber, preventing rupture of the chamber walls caused by local overexpansion during pneumatic actuation. As shown in Figure 1(c), the widths of the air chambers in the FPN segment gradually decrease from the middle joints to the fingertips, forming a tapered structure. This design is based on the observation that the pulling force at the fingertips of a tapered structure is greater than that of a uniform cross-section, 24 and it also increases the bending response speed at the fingertips under the same driving pressure. To further enhance the shear friction between the fingertips and the grasped object, a serrated design is adopted at the bottom of the FPN segment, as shown in Figure 1(c).
According to the preceding analysis, the design of the EDP soft gripper comprehensively accounts for human finger grasping characteristics, the properties of grasped objects, various grasping methods, and compatibility with flexible electroadhesive films. Furthermore, it ensures that the gripper maintains an approximately horizontal state when uninflated and limits the bending angle of each finger to less than or equal to 90° when inflated, thus avoiding fingertip interference between the two fingers. The structural parameters of the soft two-finger gripper are preliminarily determined, as detailed in Table 1.
The soft two-finger gripper structural parameters.
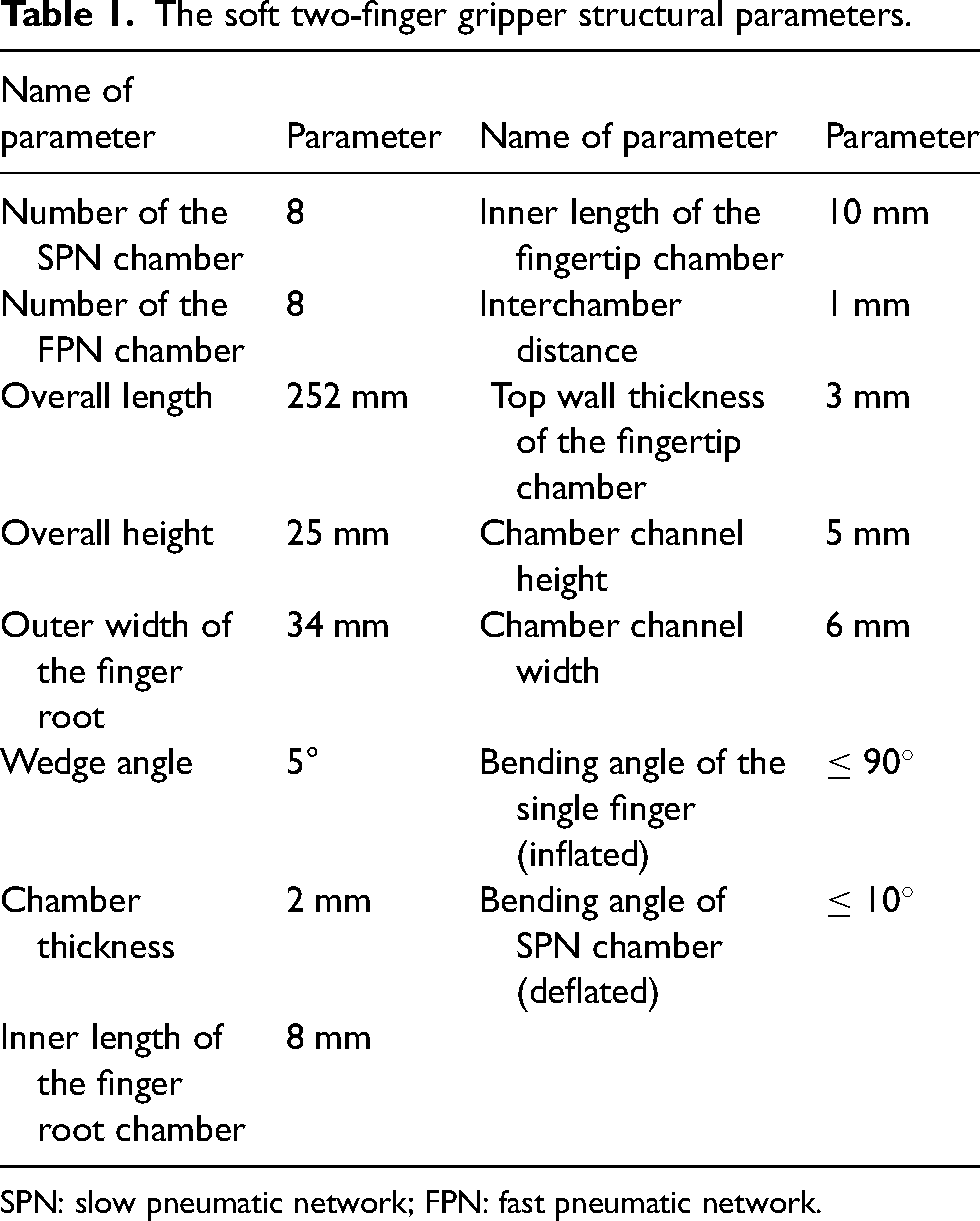
SPN: slow pneumatic network; FPN: fast pneumatic network.
Analysis of the bending deformation angle and structural size optimization
Soft manipulators are typically constructed using flexible soft materials and exhibit a wide range of motion under pneumatic actuation. The structural parameters of the soft fingers are critical factors influencing their bending deformation angles, and the careful selection of these parameters can significantly enhance the overall grasping performance of the soft manipulators. In this context, the effects of various structural parameters on the bending deformation angles of the soft fingers under varying air pressures in the chambers are analyzed herein, providing valuable guidance for optimizing the structural parameters of the fingers.
Analysis of the bending deformation angle
Under no load, the soft two-finger gripper undergoes bending deformation as the air pressure in the chambers increases. A simplified mechanical model, as illustrated in Figure 2, is employed to analyze the bending angle of the gripper. The following assumptions are considered in the analysis: (1) the air chambers of the soft two-finger gripper undergo no radial expansion; (2) the expansion of the channels within each chamber is negligible; (3) the length of the nonextensible layer remains constant; and (4) in the absence of external load and gravity, the planar bending angles of all chambers are identical. 25

Mechanical model of finger bending deformation angle analysis. (a.i) Single SPN chamber structure. (a.ii) Single SPN chamber of pressurized expansion. (a.iii) Two SPN chambers of pressurized expansion. (b.i) Single FPN chamber structure. (b.ii) Single FPN chamber of pressurized expansion. (b.iii) Two FPN chambers of pressurized expansion.
The structure of the single SPN chamber at the finger root is illustrated in Figure 2(a.i). To simplify the calculations, it is assumed that the top of the chamber forms an isosceles triangle, and the extensible and nonextensible layers at the bottom possess equal thickness. Consequently, the axial stress σ1 experienced by the single SPN chamber can be expressed as: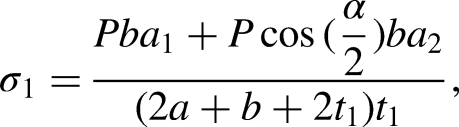

According to Figure 2(a.iii), the overall bending angle 
The structure of a single FPN chamber at the fingertips is illustrated in Figure 2(b.i). The bending deformation of the chamber results from the restriction of the expansion at the top of the chamber by the limiting layer (Figure 2(b.ii)) and the mutual squeezing between chambers after inflation. Consequently, the distance between chambers also influences the overall bending angle of the soft fingers (see Figure 2(b.iii)). Due to the irregular and complex nature of the deformation caused by squeezing, the use of standard analytical expressions for analysis is insufficient. To simplify the calculations, as illustrated in Figure 2(b.i), the deformation of the chamber sidewall is approximated as a spherical surface with constant curvature. The axial force σ2 of the single FPN chamber can be expressed as: Bending deformation angle of two chambers at a certain air pressure. (a) Theoretical bending deformation angles of the two SPN chambers.(b) Theoretical bending deformation angles of the two FPN chambers.


After the addition of the nonextensible layer, the overall bending radius of the chambers in the FPN segment can be expressed as:


Figure 3(b) presents the theoretical bending deformation angles of the two chambers in the FPN segment under pressures ranging from 0 to 40 kPa.
Optimization of the structural size
Under a specific air pressure, the chamber width, height, wall thickness, and interchamber distance are critical factors influencing the bending deformation angle of the soft two-finger gripper. 26 Abaqus software was employed to simulate the nonlinear deformation behavior of the gripper under varying geometric parameters and air pressures. Based on the simulation results, the theoretical analysis derived from the simplified mechanical model was validated, and the structural dimensions of the soft two-finger gripper were optimized.
The material of the soft two-finger gripper is Dragon Skin 20 silicone rubber, which is classified as a hyperelastic material. The Yeoh model is selected as the constitutive model, with the corresponding material parameters presented in Table 2.
Dragonskin 20 material parameters.

The two SPN chambers at the finger roots and the two FPN chambers at the fingertips are taken as examples for analysis. This analysis not only provides a clear observation of chamber variations but also reduces the computation time of finite element analysis, thus improving the operation efficiency.
Effects of the structural size parameters of the SPN chambers on the bending angle
The width, height, and wall thickness of the SPN chambers are major factors affecting their final bending deformation. Hence, three different chamber widths l2 (30, 35, and 40 mm), three different chamber heights a (20, 25, and 30 mm), and three different sidewall thicknesses t1 (1, 2, and 3 mm) were selected as the structural size variables. The analysis was carried out by varying one structural parameter while keeping the other parameters constant, under the gradual application of pressure in the chambers from 0 to 40 kPa, and the results are presented in Figure 4.
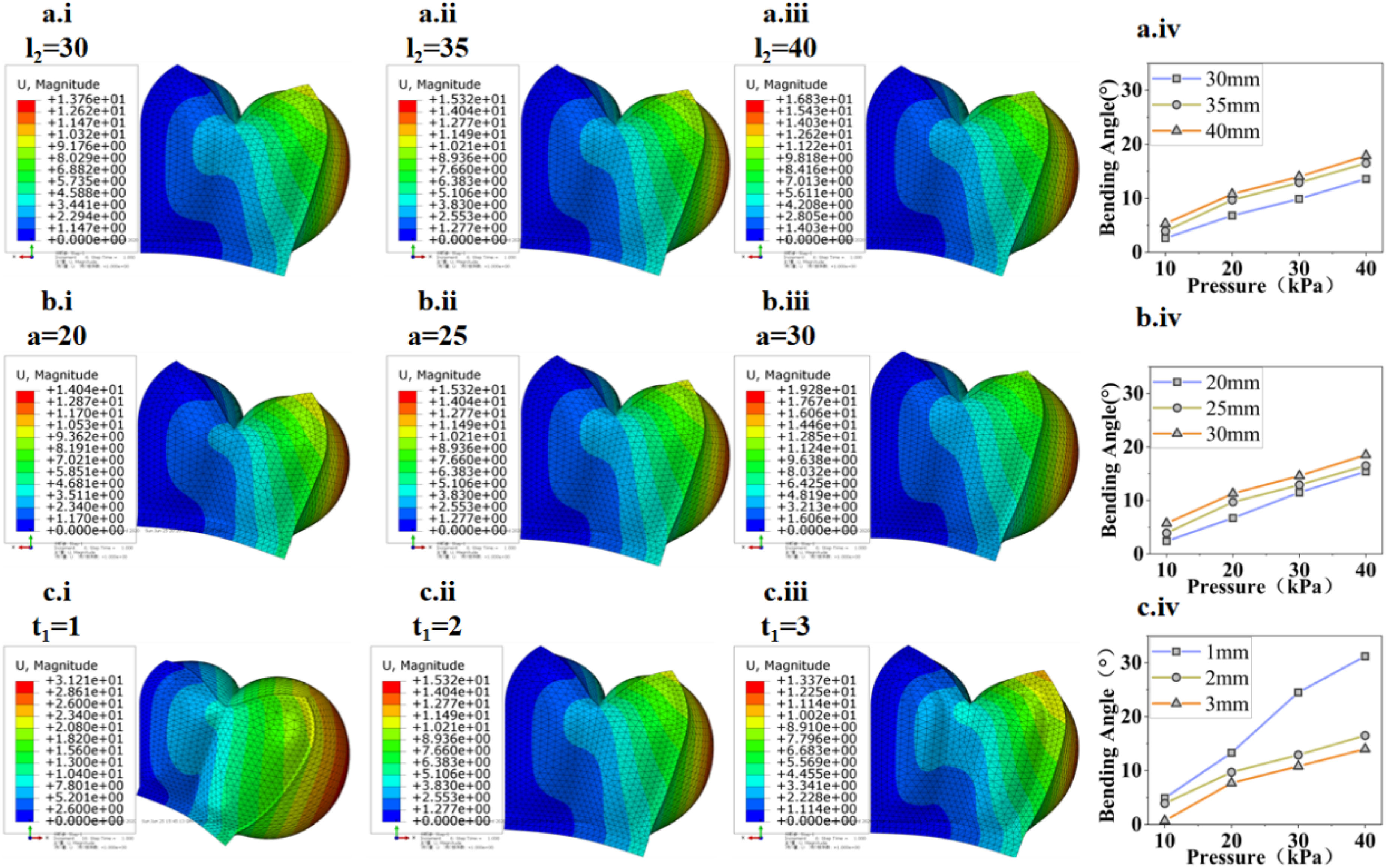
Finite element analysis model and results of two SPN chambers. (a.i–a.iii) Deformation contour maps for different chamber widths l2 (30, 35, and 40 mm) at 40 kPa. (a.iv) Relationship between bending deformation angle and air pressure with three different chamber widths. (b.i–b.iii) Deformation contour maps for different chamber heights a (20, 25, and 30 mm) at 40 kPa. (b.iv) Relationship between bending deformation angle and air pressure with three different chamber heights. (c.i–c.iii) Deformation contour maps for different side wall thickness t1 (1, 2, and 3 mm). (c.iv) Relationship between bending deformation angle and air pressure with three different sidewall thicknesses.
As shown in Figure 4(a.i–a.iv)–(b.i–b.iv), at a certain air pressure, larger chamber width and height result in greater chamber deformation. Furthermore, as the air pressure increases, the bending angle also increases. However, larger chamber width and height lead to longer expansion times for the chambers. Similarly, as shown in Figure 4(c.i–c.iv), thinner chamber walls result in greater deformation, and the bending angle increases with rising pressure. This effect is most pronounced at a wall thickness of 1 mm, with a significant increase in the bending angle observed at 30 kPa. However, extremely thin walls are unable to effectively restrain chamber expansion under high pressure, potentially causing a ballooning effect or even rupture. Based on these findings, the optimized structural parameters for the SPN chambers were determined as follows: width l2 = 35 mm, height a = 25 mm, and wall thickness t1 = 2 mm.
Effects of the structural size parameters of the FPN chambers on the bending angle
The width, height, wall thickness, and interchamber distance of the FPN chambers are key factors influencing their final bending deformation. Accordingly, three different chamber widths l1 (25, 30, and 35 mm), three different chamber heights a (15, 20, and 25 mm), three different chamber wall thicknesses t1 (1, 2, and 3 mm), and three different interchamber distances lg (1, 2, and 3 mm) were selected as the structural size variables. The analysis was conducted by varying one structural parameter while keeping the other parameters constant, under a gradual increase in chamber pressure from 0 to 40 kPa. The results are presented in Figure 5.

Finite element analysis model and results of two FPN chambers. (a.i–a.iii) Deformation contour maps for different chamber widths l1 (25, 30, and 35 mm) at 40 kPa. (a.iv) Relationship between bending deformation angle s and air pressure with three different chamber widths. (b.i–b.iii) Deformation contour maps for different chamber heights a (15, 20, and 25 mm) at 40 kPa. (b.iv) Relationship between bending deformation angle and air pressure with three different chamber heights a. (c.i–c.iii) Deformation contour maps for different wall thicknesses t1 (1, 2, and 3 mm) at 40 kPa. (c.iv) Relationship between bending deformation angle and air pressure with three different chamber wall thicknesses. (d.i–d.iii) Deformation contour maps for different interchamber distances lg (1, 2, and 3 mm) at 40 kPa. (d.iv). Relationship between bending deformation angle and air pressure with three different interchamber distances.
As shown in Figure 5(a.i–a.iv)–(b.i–b.iv), at a certain air pressure, larger chamber width and height result in greater chamber deformation. Moreover, as the pressure increases, the bending angle also increases. As shown in Figure 5(c.i–c.iv), thinner chamber walls result in greater deformation, with the bending angle increasing significantly when the wall thickness is 1 mm, particularly at pressures exceeding 30 kPa. As depicted in Figure 5(d.i–d.iv), larger interchamber distances result in greater chamber deformation and smaller bending angles due to reduced mutual squeezing between chambers. However, excessively small interchamber distances can cause internal wall squeezing, leading to fractures at the chamber base. Based on this analysis, the optimized structural parameters of the FPN chambers were determined as follows: width l1 = 30 mm, height a = 20 mm, wall thickness t1 = 2 mm, and interchamber distance lg = 2 mm.
Effects of the number of chambers on the bending angle
Figure 6 presents the simulation results of the soft two-finger gripper with different numbers of SPN and FPN chambers under a pressure of 40 kPa. Figure 6(a.i) illustrates the bending deformation effect when the gripper included a total of 12 chambers (six SPN and six FPN chambers). In this configuration, a single finger could not achieve a bending angle close to 90°, making it impossible to grasp small objects at the fingertips and unfavorable for enveloping large objects due to the limited contact area. Figure 6(a.ii) depicts the effect when a total of 16 chambers (eight SPN and eight FPN chambers) were included. Under 40 kPa, a single finger could achieve a bending angle close to 90°. Figure 6(a.iii) demonstrates the effect when a total of 20 chambers (10 SPN and 10 FPN chambers) were used. Under 40 kPa, the bending angle of a single finger was excessively large, and the fingertips of the two fingers exhibited significant interference, leading to excessive squeezing of the grasped object and negatively impacting grasping performance. Based on this analysis, the use of eight SPN chambers and eight FPN chambers in the soft two-finger gripper satisfies the design requirement of enabling a single finger to achieve a bending angle close to 90° when inflated.

Finite element analysis results of soft two-finger gripper at 40 kpa. (a.i) Deformation contour maps for six SPN chambers and six FPN chambers. (a.ii) Deformation contour maps for eight SPN chambers and eight FPN chambers. (a.iii) Deformation contour maps for 10 SPN chambers and 10 FPN chambers.
The results of the mechanical model and finite element simulation revealed consistent trends in the finger bending angle, showing that the bending angle increased with the air pressure inside the chambers. The finite element simulation results were slightly higher than those of the mechanical model analysis, which may be attributed to the mechanical model neglecting the effects of mutual squeezing between the chamber walls. Based on the finite element simulation, the overall bending deformation behavior of the soft two-finger gripper, under the coupled action of the SPN and FPN chambers, was determined. These findings validate the effectiveness of the designed dual-pneuNet biomimetic soft two-finger gripper.
Design of flexible electroadhesive films
An electroadhesion system consists of a substrate layer, an insulating layer, a conductive electrode, an object to be adhered, and a high-voltage control system, as shown in Figure 1(b.i). When the conductive electrode is connected to a high voltage, electroadhesion force is generated between the charges on the high-voltage electrode and the polarized charges on the surface of the adhered object. Parameters such as the electrode material, insulating layer material, substrate material, electrode width, interelectrode distance, number of electrodes, and electrode shape of the electroadhesive film significantly influence the adhesion force of the film. 27 In this study, the theoretical electroadhesion model was analyzed, and mathematical relationships between the electroadhesion force and key parameters—including excitation voltage, electrode width, interelectrode distance, insulating layer thickness, and relative dielectric constant of the insulating layer—were established. Python was employed for nonlinear optimization of the electroadhesion force to determine the optimal values of each influencing parameter within a specific range. 28 Furthermore, considering the compatibility of the electroadhesive films with the integration positions on the soft two-finger gripper, dual interdigital electrodes were selected. COMSOL Multiphysics software was used to simulate the unit area adhesion force under a 6 kV voltage for various shapes of dual interdigital electrodes, including straight, straight sawtooth, slant sawtooth, semicircle, equilateral triangle, isosceles triangle, and sinusoidal shapes. The simulation results, displayed in Figure 7, indicate that at an amplitude of 2.5, the sinusoidal interdigital electrode achieved a maximum unit area adhesion force of 0.33766 kPa, nearly twice that of the traditional straight electrode (0.17024 kPa). Consequently, the optimal electrode for the electroadhesive films of the soft gripper was determined to be a sinusoidal interdigital electrode with an amplitude of 2.5, an effective area of 140 mm × 24 mm, an electrode width of 2 mm, and an interelectrode distance of 2 mm, as shown in Figure 1(b.ii).

Unit area adhesive forces for different shapes of dual interdigital electrodes under 6 kV voltage: (a) slant sawtooth shape (b) straight sawtooth shape (c) straight line shape (d) sinusoidal wave with an amplitude of 1 shape (e) semicircular shape (f) equilateral triangle shape (g) isosceles triangle shape (h) sinusoidal wave with an amplitude of 2.5 shape.
As shown in Figure 1(c), the electroadhesive film is integrated at the base of the soft finger root. During the grasping process, it bends and deforms along with the fingers and must maintain high conductivity and effectiveness. Consequently, the electrode material must exhibit both excellent flexibility and conductivity, while the entire electroadhesive film must possess good flexibility and stretchability. The electrode was fabricated using the screen printing method with high-viscosity graphene conductive inks, and the ink parameters are detailed in Table 3. A 25-
Parameters of graphene conductive ink material.

Development of the EDP soft gripper
A dual-pneuNet soft two-finger gripper was integrated with a flexible electroadhesive film to develop an EDP soft gripper, which can be mounted on a robotic arm via a connector for manipulation. The development of the soft gripper consisted of three stages: (1) fabrication of the dual-pneuNet soft two-finger gripper; (2) fabrication of the flexible electroadhesive film; and (3) integration of the gripper with the film.
Fabrication of the dual-pneuNet soft two-finger gripper
The dual-pneuNet soft two-finger gripper was fabricated using a combination of 3D printing and silicone casting. The finger root of the gripper required a certain degree of rigidity to ensure grasping stability and compatibility with the electroadhesive film, while the fingertips required sufficient flexibility to conform to the surface of the grasped object for effective enveloping. Accordingly, Dragon Skin 20 silicone was selected for the extensible layer of the gripper due to its appropriate hardness, fracture strength, and tensile strength, while fiber cloth was used for the nonextensible layer owing to its low cost, softness, thinness, and nonstretchable properties.
Figure 8 illustrates the fabrication process, which involved the following steps: (1) the acrylonitrile butadiene styrene (ABS) soft finger mold was 3D printed, assembled, and coated with a mold release agent on its inner surface (Figure 8(a)); (2) a mixture of Dragon Skin 20 A and B type silicone (1:1) was poured into the assembled mold, which was then placed in a drying oven at 80 °C for 45 min, followed by demolding (Figure 8(b)); (3) a uniform thin layer of silicone was poured into the base mold of the nonextensible layer, fiber cloth was placed on the silicone and solidified at the bottom of the demolded soft finger, and the assembly was air-dried at room temperature for 4 h, resulting in the preparation of the soft two-finger gripper (Figure 8(c)).
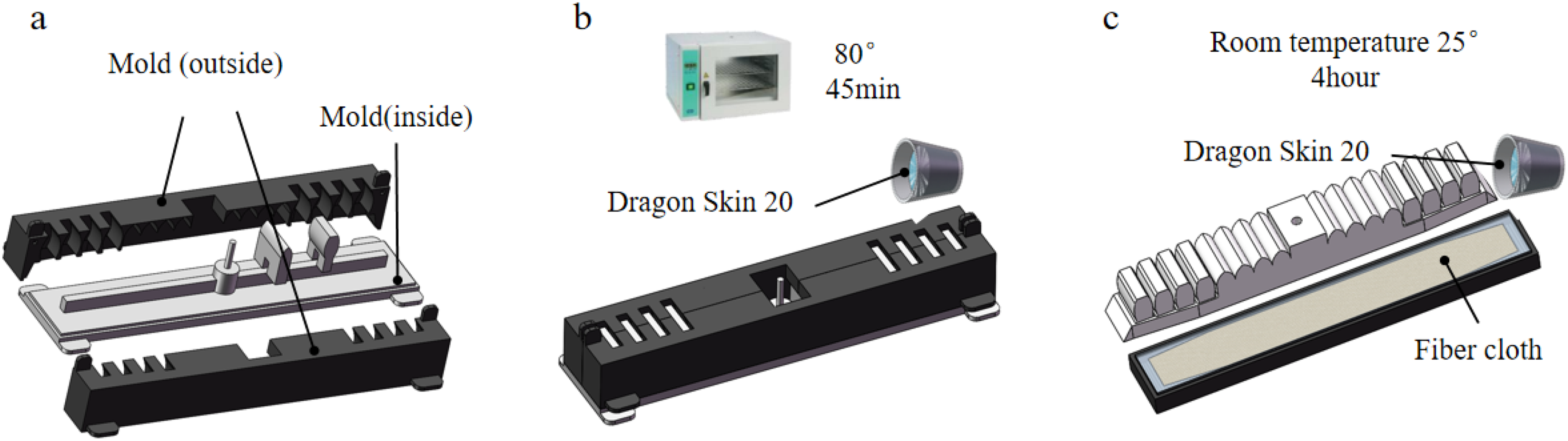
Fabrication of soft two-finger. (a) Assembling mold. (b) Casting silicone two-finger. (c) Casting the nonextensible layer.
Fabrication of the electroadhesive film
A flexible electrode was prepared using screen printing technology, which is one of the most promising methods for the manufacturing of high-performance electrodes due to its simplicity, reusability, high electrode accuracy, and compatibility with various flexible substrates. The development process of the electroadhesive film is shown in Figure 9, and included the following steps: (1) a screen plate was constructed by tightly attaching a film with printed electrode patterns to a screen plate uniformly coated with photosensitive glue, which was then exposed to light and rinsed, thus producing a screen plate with electrode patterns (Figure 9(a)); (2) graphene conductive inks were uniformly applied onto the screen plate, the electrode pattern on which was printed onto a clean PI film, and the printed electrode was dried in a drying oven at 50 °C for 2 h (Figure 9(b)); (3) copper foil was attached to the electrode pins, and Ecoflex 00-30 silicone was evenly applied on the electrode for sealing followed by air-drying at room temperature for 4 h, thus completing the preparation of the flexible electroadhesive film (Figure 9(c)).

Fabrication of flexible electroadhesive film. (a) Fabrication of screen plate. (b) Printing electrode. (c) Sealing electrode.
Assembly of the EDP soft gripper
Figure 10 shows the assembly process of the soft gripper. The electroadhesive film was attached to the bottom of the soft two-finger gripper using Ecoflex 0030 and then placed in a drying oven at 80 °C for 45 min (Figure 10(a.i)). The 3D-printed PLA connecting flange was installed at the connection point of the soft fingers (Figure 10(a.ii)), completing the assembly of the EDP soft gripper, as shown in Figure 10(a.iii).

Assembly of the EDP soft gripper. (a) Assembling the electroadhesive film. (b) Assembling connecting flange. (c) The EDP soft gripper.
Adhesion test of the flexible electroadhesive film
The electroadhesion force generated by the electroadhesive film includes normal force and shear force, and its magnitude is closely associated with the grasping performance of the gripper. Considering that the EDP soft gripper can conform and adapt to both flat and convex object surfaces during grasping, a platform was established to measure the adhesion force of the electroadhesive film on flat and convex objects, thereby evaluating the adhesion performance. It should be noted that when the contact surface of the electroadhesive film and the object to be adhered was flat, both the normal force and shear force were measured. However, when the contact surface was curved, only the normal force was measured, as the shear force could not be determined.
Figure 11 depicts the force measurement platform. The electroadhesive film and an ATI six-axis force sensor were mounted on a nut bracket. The motor rotated in the positive direction, moving the nut to the right, which allowed the electroadhesive film to fully adhere to the object affixed to the fixed support. The electroadhesive film was charged for 60 s, after which the motor rotated in the negative direction, moving the nut to the left and causing the electroadhesive film and the object to completely separate. After powering off, the electroadhesive film naturally discharged for 40 s under 0 V. The direction of the excitation voltage was then reversed for the next test. During the experiment, the peak force recorded during the instantaneous pull-out of the electroadhesive film from the object was measured. Additionally, after the electroadhesive film was separated from the object, the peak force measured by the sensor during the unloaded reverse motor rotation was recorded. The recorded peak pull-out force value was subtracted from the no-load peak value to determine the normal and shear force values. The experiment was repeated at different voltage levels applied to the electroadhesive film, with 10 sets of data recorded for each voltage level to minimize sensor errors caused by environmental factors. The experimental results are shown in Figure 12.

Electroadhesion force measurement platform. (a.i) Schematic of normal force measurement platform. (a.ii) Normal force measured on flat contact surface. (a.iii) Normal force measured on convex contact surfaces. (b.i) Schematic of shear force measurement platform. (b.ii) Shear force measured on flat contact surface.

Experimental results of electroadhesive force for flexible electroadhesive film. (a–c) The adhesion force values of the electroadhesive films with three different electrode shapes. (d) Flexible electroadhesive films with three different electrode shapes. (e–f) The adhesion forces of the electroadhesive film with a sinusoidal electrode with an amplitude of 2.5 on objects of different dielectric materials.
Figure 12(a)–(c) presents the adhesion force values of the electroadhesive films with three different electrode shapes (a linear shape, a sinusoidal shape with an amplitude of 1, and a sinusoidal shape with an amplitude of 2.5) under voltages ranging from 1 to 6 kV for the same material (acrylic) on the object to be adhered. The adhesion force was observed to increase monotonically with the applied voltage. Moreover, the electroadhesive film with a sinusoidal electrode shape and an amplitude of 2.5 exhibited higher adhesion forces, both for normal and shear forces on flat contact surfaces and for normal forces on convex contact surfaces, compared to the films with a sinusoidal electrode with an amplitude of 1 and a linear electrode. These results align with the finite element analysis results discussed previously. When the contact surface was flat (Figure 11(a.ii)), the electroadhesive film with a sinusoidal dual interdigital electrode and an amplitude of 2.5 achieved a shear force of 11.2 N at a voltage of 6000 V. When the electroadhesive film was affixed to a concave surface with a curvature of 1/110 (Figure 11(a.iii)), and the object had a convex surface with a curvature of 1/110, the normal force on the adhering surface was slightly smaller than that on the flat contact surface, reaching a maximum value of 2.5 N.
Figure 12(e) and 12(f) presents the variations in the normal and shear forces of the electroadhesive film with a sinusoidal electrode having an amplitude of 2.5 on objects made of different dielectric materials under voltages ranging from 1 to 6 kV. Both the normal and shear forces were highest on the glass object, followed by the acrylic object, and lowest on the ABS object. This phenomenon is attributed to the relative permittivity of the adhered materials; glass has the highest relative permittivity, while ABS has the lowest. A larger relative permittivity of the adhered material results in a greater electroadhesion force. Overall, the proposed electroadhesive film demonstrated a significant enhancement in grasping performance when integrated with the soft gripper.
Experimental setup and evaluation
Design of the control system
The EDP soft gripper was mounted on a UFactory xArm six-axis robotic arm, and precise control of the gripper's spatial movement was achieved using UFactory uArm Studio. A Bluetooth connection was established between a smartphone, functioning as the master device, and an Arduino development board, enabling the grasping modes of the gripper to be controlled through a custom-developed mobile app. During pneumatic operation, the direction of airflow was controlled, and the air pressure was adjusted, while during electric operation, the direct current power supply was connected, and the voltage was regulated, as shown in Figure 13.

Control process of EDP soft gripper.
Grasping cases
The EDP soft gripper can achieve multimode grasping: (1) fingertip and enveloping grasping in the pneumatic mode; (2) adhesion grasping in the electroadhesion mode; and (3) electroadhesion-enhanced pneumatic enveloping grasping.
Figure 14(a.i)–(a.vi) presents the fingertip and enveloping grasping experiments of the EDP soft gripper in the pneumatic mode. The soft gripper's fingertips successfully grasped fragile eggs (50 g) without damage, a relatively soft tissue (20 g) without altering its shape, a tablet (487 g) with relatively large hardness, size, and mass, as well as an infrared thermometer(231 g) with an irregular, asymmetric shape featuring concave–convex surfaces. Additionally, the gripper achieved fully self-adaptive enveloping grasping of a cylindrical jar (800 g) and a custom acrylic arch-shaped object (1081 g). These experimental results suggest that the EDP soft gripper can safely and nondestructively adapt to grasping objects of varying hardness, shape, and size in the pneumatic mode. This demonstration underscores the gripper's ability to handle complex geometries without requiring complex control adjustments, further validating its versatility and robustness in diverse grasping scenarios.

Grasping case. (a.i–a.vi) Grasping in the pneumatic mode. (b.i–b.iv) Grasping in the electroadhesive mode. (c.i–c.ii) Grasping in the electroadhesive-enhanced mode.
Figure 14(b.i)–(b.iv) shows the adhesion grasping experiments of the EDP soft gripper in the electroadhesion mode. The soft gripper successfully grasped a small metal screw (7 g), a flat film (1 g), a soft fabric (0.5 g), and an acrylic tube (145 g) with a diameter of 400 mm and dimensions exceeding the size of the gripper. The gripper demonstrated its ability to grasp small objects, flat objects on surfaces, soft and deformable objects, as well as irregularly shaped objects without distortion or damage to the grasped objects, while also expanding the range of its grasping sizes.
Figure 14(c.i–c.ii) presents the grasping experiment of the EDP soft gripper in the electroadhesion-enhanced pneumatic enveloping grasping mode. The soft gripper, combining pneumatic actuation and electroadhesion, successfully grasped a mouse characterized by an asymmetric curved surface, which deviates from symmetrical geometries. The electroadhesion-enhanced mechanism provided supplementary surface adherence, ensuring stable grasping of the asymmetric mouse without slippage or damage. Additionally, the gripper successfully grasped a custom acrylic arch-shaped object with a lateral size of 160 mm and a maximum mass of 1230 g, representing a 13.8% improvement in grasping mass compared to the pneumatic mode (Figure 14(a.vi)), in which the maximum grasping mass was 1081 g.
Quantitative analysis of the grasping performance concerning the size and mass of grasped objects
Figure 15 presents the experimental results of the grasping performance evaluation in relation to the size and mass of the grasped objects. Considering the adaptability of the EDP soft gripper to the shape of the grasped object during enveloping grasping, a series of custom-made acrylic arch-shaped objects with identical appearances but gradually increasing size and mass were prepared. The grasping performance was evaluated by conducting enveloping grasping experiments with these objects. During the experiment, weights were added to the objects to determine the maximum grasping mass achievable for each size. The experiment was deemed successful if the grasped object remained securely held for 10 s without falling.

The quantified results of the size and mass of grasped objects.
According to the experimental results, at a 0-V excitation voltage, the maximum grasping mass for an arch-shaped object with a lateral size (L) of 120 mm was 284 g, while at a 5-kV excitation voltage, it increased to 384 g, representing a 35.2% improvement. As the size of the arch-shaped object increased, the contact area between the soft gripper fingers and the object also increased, resulting in an increase in grasping mass. When the object had a lateral size of 160 mm, the fingers of the soft gripper achieved optimal enveloping and maintained sufficient gripping contact. At 0 V, the maximum grasping mass was 1081 g, while at 5 kV, it increased to 1231 g, reflecting a 13.8% improvement. However, as the size of the object continued to increase, the soft gripper fingers gradually straightened, reducing the contact area of the grip and leading to a decreasing trend in grasping mass. For objects with a size of ≥200 mm, the soft gripper fingers became nearly straight and were unable to exert sufficient gripping force on the object. In the single pneumatic mode, larger objects could not be grasped. However, electroadhesion grasping remained effective, enabling the gripper to grasp an acrylic tube (145 g) with a maximum diameter of 400 mm, significantly exceeding the size of the gripper itself (252 mm). The experimental results demonstrate that in the electroadhesion-enhanced mode, the EDP soft gripper exhibited notable improvements in both the mass and size of the grasped objects.
Conclusions
An electroadhesion-enhanced pneumatic soft gripper that mimics the grasping characteristics of human fingers was proposed. The gripper was assembled using an easily implemented and cost-effective dual-pneuNet soft two-finger gripper (fabricated via silicone casting), flexible electroadhesive films (fabricated via screen printing), and a connecting flange (fabricated via 3D printing). The EDP soft gripper can perform fingertip and enveloping grasping in the pneumatic mode, adhesion grasping in the electroadhesion mode, and electroadhesion-enhanced enveloping grasping. It can also adapt to objects of varying hardness, shapes, and sizes, effortlessly grasping small, delicate, flat, and flexible deformable objects without distortion or damage. Additionally, the electroadhesion-enhanced mode extends the size and mass ranges of graspable objects beyond those achievable by traditional single grasping modes, thereby promoting the application of electroadhesion-enhanced pneumatic soft grippers in robotic material handling.
The contributions of this study are as follows. (1) The concept of effectively and reliably integrating a pneumatic soft gripper with electroadhesion technology was introduced, expanding the fingertip travel range and preventing failures caused by the significant deformation of the flexible electroadhesive film during bending with the soft fingers. (2) The design of the dual-pneuNet soft two-finger gripper, optimized for structural size, mimics the functionality of human fingers by providing high rigidity at the finger root and rapid, large deformation capability at the fingertips. The designed soft gripper demonstrated reliable self-adaptivity, grasping stability, and rapid responsiveness. (3) An experimental platform for measuring the normal and shear forces of the flexible electroadhesive films was established, and the electroadhesion forces on flat and convex surfaces of different materials were quantitatively analyzed. (4) The control process of the gripper was designed, various grasping cases were analyzed, and the grasping performance was quantitatively evaluated.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the 2021 Joint Project between Universities in Chongqing and Affiliated Institutes of Chinese Academy of Sciences (Grant No. HZ2021011).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.