
Abstract
In clinical practice, prostate particle implantation surgery is performed by a robot control puncture needle; it is a safe and effective treatment method for prostate cancer. During surgery, the tissue deformation is caused by interaction forces between the needle and soft tissue, which results in the displacement error between the needle tip and the target point in the axial direction, thus affecting the precision of particle implantation and treatment effect. Therefore, an axial compensation precision puncture control method for prostate puncture robot is proposed in this article. Firstly, the position action relationship between the puncture needle and the target point is analyzed in the needle’s entry into the tissue, and the force analysis is carried out by the biomechanical Kelvin model; the interaction model between the puncture needle and the soft tissue is established, so as to obtain the axial compensation precision puncture control model. Then, an improved adaptive particle swarm optimization (PSO) algorithm based on Levy Flight is proposed to identify parameters of this control model for puncture prostate in this article. Matlab–Adams co-simulation mode is used to simulate and analyze the axial compensation precision puncture control method when the puncture needle enters soft tissue, and thus the optimal parameters of this control model for puncture prostate are obtained. Finally, the experiment of puncture velocity with the axial compensation and comprehensive experiment of axial compensation puncture control method are carried out in combination with the robot. The results of the puncture velocity verification experiment show that when the puncture velocity is 12.3 mm/s, the parameters values (elastic coefficient of 2.165 N/m and damping coefficient of 0.754 Ns/m) obtained by identification are reasonable. In the experimental analysis for parameters identification, bionic soft tissue and pig kidney are used for experimental identification, and the results are basically consistent with the simulation. In the comparison experiment of axial compensation positioning performance, the coincidence degree between the tip of the puncture needle and the designated position reached 80% (higher than 35% of direct puncture). Meanwhile, in the comparison experiment of different puncture depths, the axial puncture deviation is 0.54–0.62 mm when the puncture depth is 50–80 mm, which is significantly smaller than the direct puncture of 1.58–2.15 mm. The experimental results further demonstrate the effectiveness of the axial compensation precision puncture control method proposed in this article and the identification of parameter values, which can better improve the puncture accuracy and ensure the treatment effect of particle implantation for prostate cancer. The contents of this article can provide reference for the research of minimally invasive puncture surgery.
Keywords
Introduction
In recent years, prostate cancer has become an important disease threatening men's life and health, with increasing significance of population aging, 1 its incidence and mortality gradually increase. 2 According to the latest statistics of cancer patients from the American Cancer Society, the incidence of prostate cancer is second only to breast cancer, lung cancer, and bowel cancer among all cancers. 3 In China, the incidence of prostate cancer also shows an increasing trend and gradually tends to get younger, becoming an important disease threatening the health of Chinese men.4,5 In clinical practice, doctors mainly use minimally invasive near-distance radioactive particle implantation methods to treat prostate cancer. 6 This treatment method has the characteristics of strong targeting, little trauma, fast efficacy, low recurrence rate, easy operation, and so on. But, because of the uncertainty of manual operation and multiple consecutive operations, doctors will make mistakes due to fatigue, psychological pressure, and negligence of operation, thus affecting the treatment effect. 7 Therefore, puncture surgery robot technology has broad development prospects in the field of medical robot research 8 (Da Vinci robot is the most representative 9 ); it not only has precision linear puncture positioning and stable movement, but also can help doctors to carry out continuous work, while causing little harm to patients and conducive to the recovery of surgical wounds after the operation. 6 However, puncture surgery robot technology is used to implant radioactive particles such as I235 and I125 into the target site to treat prostate cancer; the particles can be accurately placed at the planned target points, so as to reduce the number of repeated puncture caused by manual operation, improve the uniform distribution of radiation dose in the target area, reduce postoperative complications, and ensure the treatment effect. 10 But, there are complex forces between the needle and the prostate soft tissue during puncture, and these complex forces will interact with each other, resulting in the puncture needle not able to accurately send radioactive particles into the target points, thus affecting the treatment effect. So, many scholars have conducted a lot of relevant research in the field of needle–soft tissue precision puncture control technology.
Minhas et al. 11 proposed a control method of continuous rotation puncture, which could reduce the needle body deflection to a certain extent during needle puncture of soft tissue by controlling the duty ratio between the needle body rotation and puncture time. On this basis, Majewicz et al. 12 further studied an alternate rotating puncture control method to improve the positioning accuracy during needle puncture soft tissue. Mahvash and Dupont 13 obtained the following conclusions after conducting puncture experiments on bovine heart soft tissue: When the needle punctures the soft tissue epidermis, the deformation of soft tissue could be improved, the needle body deflection and soft tissue injury could be reduced by increasing the puncture velocity. Liu et al. 14 proposed parameterized puncture direction angle and 180° axial rotation as needle control inputs to adjust needle deflection. However, the puncture control of this method has a certain lag and affects the efficiency of surgery. Sun et al.15,16 proposed a fuzzy control puncture method based on force-position feedback to improve its puncture accuracy, and the implementation steps of this method are as follows: When the puncture needle enters the soft tissue at the moment, the robot should stop the puncture movement until the soft tissue recovers the relaxed state, and then perform the puncture at half the original velocity. Zhang et al. 17 designed a precision puncture control strategy based on vibration-rotation to reduce the deformation of the prostate soft tissue during the puncture process, thereby the positioning accuracy of puncture prostate soft tissue is improved. Liu et al. 18 established a needle–soft tissue mechanical model by simulating the deflection condition in needles puncturing different soft tissues, and a soft tissue puncture control method based on five different injection angles is proposed, which could predict and compensate the deflection error. Li et al. 19 proposed a real-time update method for puncture steering in non-uniform soft tissues. This method uses integrated FBG (Fiber Bragg Grating) sensor to design the puncture needle, and combines MRI navigation to observe and control the puncture needle, so as to improve the accuracy of the puncture needle.
In addition, in the latest research methods of puncture control, represented by Dai and Zhang, 20 a puncture control method based on corrective force is proposed. This puncture method adjusts the deflection value of the puncture needle at the final puncture depth by applying corrective force at the puncture needle rod and realizes the steering of the puncture needle. It can effectively improve the puncture accuracy. However, the size and timing of the application of corrective force require high accuracy of the doctor's operation, and improper operation can cause soft tissue tears in patients.
The above researchers mainly aimed at when the puncture needle penetrated the soft tissue, it mainly reduces the friction between the soft tissue and the puncture needle and the compound force between the bevel of the tip and the soft tissue by controlling the puncture method, so as to reduce the deflection of the puncture needle and improve the puncture positioning accuracy. However, in the direction of puncture (axial), the axial displacement error of puncture needle is also a major factor affecting the accuracy of positioning due to soft tissue deformation (stiffness and damping disturbance exist between puncture needle and prostate soft tissue, resulting in tension and deformation of soft tissue), and there is a lack of research in this aspect in existing puncture control methods. Therefore, it is difficult to ensure the axial accurate puncture positioning requirements of the puncture robot in the surgical process, so it is necessary to analyze and research this situation.
In this article, an axial compensation precision puncture control method is proposed to further improve the axial positioning accuracy of prostate particle implantation. Firstly, the position action relationship between needle tip and target point is analyzed. Secondly, the biomechanical model of prostate soft tissue is constructed and analyzed, and the axial compensation precision puncture control model is derived. Thirdly, the virtual prototype model is established by Matlab–Adams co-simulation, and the parameters of the puncture control model are identified according to the combined swarm intelligence algorithm (an improved adaptive PSO algorithm based on Levy Flight) proposed in this article. Finally, the prostate puncture robot is constructed to perform comprehensive experimental analysis on axial compensation precision puncture control method when the puncture needle enters soft tissue to verify its effectiveness.
Analysis of position action relationship between needle and target point
In actual surgery, the stage that the prostate puncture robot will implant radioactive particle into the target point, and the position action relationship between the needle tip and the target point will be carried out according to the puncture process shown in Figure 1. Among them, labels 1–10 are respectively: puncture needle, epidermis of the prostate soft tissue, target point, soft tissue deformation curve in extrusion stage, initial position of target point, surface position of the prostate soft tissue in the extrusion stage, curve of the soft tissue deformation in puncture stage, extrusion position of target point, final position of target point, and the maximum position of target point after the puncture needle is stopped.

Analysis diagram of the puncture process: (a) initial stage, (b) extrusion stage, (c) puncture stage, and (d) completion stage.
Figure 1(a) shows the given position relation between the needle tip and the target point when the puncture needle is just in contact with the surface of the prostate soft tissue, and the puncture distance needs to be preset as x (when the needle tip just contacts the soft tissue surface, the distance between the needle tip and the target point is denoted as the initial distance). Figure 1(b) shows that when the puncture needle is about to reach the critical point of the puncture of prostate soft tissue epidermis, the extrusion effect of the needle tip on the prostate soft tissue causes deformation, it makes the soft tissue after deformation, and the target point is driven to move to Δx1 along the puncture direction based on the initial distance x. At this time, the total distance that the puncture needle needs to travel to reach the target location is x + Δx1. (It is denoted as extrusion distance.) Figure 1(c) shows that the puncture needle punctures the prostate soft tissue and further extrudes it, this will lead to severe deformation of the prostate soft tissue, and the target point is driven to move to Δx2 along the puncture direction based on the extrusion distance. At this time, the total distance the needle needs to travel to reach the target location is x + Δx1 + Δx2. (It is denoted as puncture distance; at this time, as the depth of the puncture needle into the soft tissue of the prostate increases, the friction between the puncture needle body and the soft tissue of the prostate will further increase, this will lead to gradual increase in Δx2.) Figure 1(d) shows the given position reached by the puncture needle after the preset distance x is moved, after Δx2 reaches the maximum Δxmax and with the stopping of the puncture needle, the force between the soft tissue under force and the puncture needle in the direction of puncture reaches balance, and the shape variable generated by the soft tissue gradually returns to the force equilibrium state, the target position Δx2 also gradually shrinks and recovers from Δxmax along the puncture axis line. However, compared with Figure 1(c), the position of the target point is still slightly offset to Δx3. At this time, to make the puncture needle reach the target point position, the total distance needed to move is x + Δx. Where Δx = Δx1 + Δx2 + Δx3.
According to the comprehensive analysis of Figure 1, when the needle tip reaches the given position of the target point, due to the complex force between the puncture needle and the soft tissue, 21 the extrusion deformation of the soft tissue causes the target point to move to Δx distance overall in the direction of axial puncture. So, the axial positioning error will be caused during the prostate particle implantation surgery and the treatment effect will be affected. Therefore, it is necessary to research an axial compensation precision puncture control method when the puncture needle enters the prostate soft tissue.
Force analysis of needle–soft tissue puncture direction
In modern medical research, the establishment of a suitable prostate soft tissue model can better simulate the real human organ behavior, so as to provide a more accurate reference for the real human body soft tissue deformation research. Therefore, the reasonable selection of soft tissue modeling method is an important basis for exploring the deformation of human soft tissue.
Biomechanical model of prostate soft tissue
Like other human soft tissue, prostate soft tissue is mainly composed of the intercellular substances and cells, but the individual cells between different soft tissues are different, which reflects the special properties of the human soft tissue, including non-uniformity, nonlinearity, viscoelasticity, plasticity, and anisotropy.
In general, prostate soft tissue can be assumed to be a theoretically uniform isotropic material. Among them, the viscoelasticity of soft tissue is characterized by relaxation, creep, and hysteresis. That is, when the deformation is constant, the value of the force decreases with the increase of time, resulting in relaxation. When the force is constant, the deformation gradually increases with time, resulting in creep. When the relationship between soft tissue deformation and stress value during loading and the force value is different from that during unloading, it leads to the occurrence of hysteresis. Therefore, to better explain and describe the viscoelastic problem of soft tissues, in this article, the Kelvin biomechanical model is built by the mode of combining spring and damper according to the literature, 22 as shown in Figure 2. Where, ks is the spring element and kd is the damping element.

Biomechanical Kelvin model.
The spring element ks satisfies Hooke's law as follows:


According to Figure 2, the Kelvin model is formed by ks spring element and kd damping element in parallel, so the relationship between the compression stress (fb) of the soft tissue on the puncture needle and shape variable is as follows:

Interaction model of needle–tissue
Because the puncture movement of puncture needle is the main power source of soft tissue deformation, there is a compound force between puncture needle and soft tissue during puncture surgery.
In Figure 3, Fj is the puncture force, Ffd is the resistance dynamic friction, Ffs is the resistance static friction, fc is the viscosity stress, fb is the extrusion stress, D is the diameter of the puncture needle, L is the length of the puncture needle, and L0 is the length of the part that the puncture needle does not pierce into the soft tissue. Meanwhile, q is the radial triangular load distribution force exerted on the diameter rod of the piercing needle due to the damping and stiffness effects of the soft tissue itself due to radial deformation (this force is the main factor of friction between the piercing needle and the soft tissue).

Needle–soft tissue interaction model.
When the robot controls the puncture needle into the prostate soft tissue, the Kelvin model is used to analyze the extrusion deformation (its value is ε) of the soft tissue caused by the needle tip and the resistance deformation (its value is D/2) and viscosity deformation (since the viscosity deformation value of the needle body to the soft tissue is approximately equal to the deformation value of the needle tip when the soft tissue is punctured near, the viscosity shape variable is approximately equal to the extrusion shape variable, and its value is about ε) caused by the needle body. Meanwhile, the soft tissue will produce extrusion stress on the needle tip, friction resistance, and viscosity stress around the needle body.
According to the analysis in Figure 3, at any time during the puncture, the forces received by the puncture needle in the direction of puncture will remain balanced. Therefore, with the increase of puncture depth, its puncture force Fj can be expressed as:

When the movement of the puncture needle stops, the force received by the puncture needle in the puncture direction will also maintain balance, and its puncture force Fj can be expressed as:

Through the analysis of Equations (4) and (5), it can be seen that the value of the dynamic friction resistance between the puncture needle and the soft tissue is also far less than the maximum value of the static friction resistance, so the needle–soft tissue interaction model can be simplified to Equation (5) for further analysis.
Establishment of an axial compensation precision puncture model
According to Equation (5), when the robot controls the puncture needle to reach the designated position and stops, the puncture force received by the puncture needle is equal to the resistance to static friction force, and the resistance to static friction force is caused by the soft tissue stress of the needle, so the puncture force is equal to the soft tissue stress (extrusion stress and viscosity stress) received by the needle tip and needle body.
Therefore, Equations (1)–(3) are brought into Equation (5) to obtain Equation (6).

The Laplace transform of Equation (6) can obtain the transfer function between puncture force Fj and prostate soft tissue deformation ε (puncture error Δx to be compensated).

Simulation identification of control model parameters
According to the analysis in “Establishment of an axial compensation precision puncture model” section, in the case of specified puncture displacement and reasonable puncture velocity, the elastic coefficient k and viscosity coefficient c are important parameters affecting puncture deviation compensation. Meanwhile, the amount of deformation between the puncture needle and the soft tissue is also an important index to accurately identify the elastic coefficient k and viscosity coefficient c. Therefore, it is first necessary to establish a simulation virtual prototype model according to the puncture requirements, and then carry out parameter identification according to the model combined with swarm intelligence algorithm.
Establishment of simulation virtual prototype model
When the puncture needle comes into contact with soft tissue, the surface of the needle body and the needle tip interact with the soft tissue, resulting in deformation. However, because this deformation needs to be measured thousands of times in the actual test, and it is difficult to measure accurate results, it is necessary to establish a simulation virtual prototype model (including structure model and parameters identification model) to complete the parameter identification of the elastic coefficient k and viscosity coefficient c of the prostate soft tissue.
Construction of structural model
Firstly, Solidworks software is used in this article to model the terminal puncture device of the prostate puncture robot and the prostate soft tissue, as shown in Figure 4. Then, the completed file is imported into “Adams software” to set the structure model. Among them, labels 1–10 respectively indicate fixed base, limit switch, prostate soft tissue model, puncture external needle, external needle rotating motor, six-dimensional force sensor, internal needle, linear displacement sensor of puncture external needle, internal needle drive motor, and external needle drive motor.

Diagram of puncture soft tissue structural model.
In the Adams virtual prototype model, the material parameters of the prostate soft tissue model (label 3) are set according to the literature, 23 and on this basis, grid division is also required ((1) select tetrahedral mode according to model structure; (2) to ensure the calculation velocity and accuracy, select 40×40 grids). Meanwhile, the initial distance between the puncture external needle and the prostate soft tissue model is 20 mm. The output pins of the force and displacement sensors are set according to modules 6 and 8 as shown in Figure 4. The internal/external pins drive the motors 9 and 10 and the external pins rotate the motor 5, and they all set the input pins of the drive signals. The constraints and mechanical settings between the remaining components are also completed according to the motion requirements and simulation tasks.
Construction of parameters identification model
The establishment of the transfer function of the drive motor is the premise and basis for building the parameter identification model. Therefore, the inner/outer needle (9, 10) drive motor shown in Figure 4 is a two-phase rotary stepper motor; its mathematical model is relatively complex and involves many parameters, so different transfer functions can be selected according to different research objects. This article constructs the transfer function G(s) of the two-phase rotary stepper motor according to the working mode (input pulse signal) of the two-phase stepper motor and according to the literature,24,25 as shown in Equation (8).

The simulation analysis of acupuncture soft tissue control compensation is carried out in the co-simulation mode of Matlab and Adams. Meanwhile, the established Adams mechanism model is converted into Matlab plug-in, and combined with Equations (6) and (8), the simulation virtual prototype model is established in Matlab/Simulink, as shown in Figure 5. Where, x0 represents the signal of input displacement, x1 represents the signal of output displacement, ex represents the deviation of displacement, ev represents the deviation of velocity, Fi represents the output force of model, p represents the screw pitch, ka represents the parameter of displacement adjustment, kf represents the parameter of force adjustment, and ΔF represents the deviation of reference force (because, when “ΔF” converges to 0, it means that the force generated by soft tissue deformation and the puncture force are in force balance, and the absolute value of “ΔF” is used in the fitness function for identification). Meanwhile, the puncture control method is sinusoidal rotation puncture as shown in reference. 23

Diagram of simulation virtual prototype model.
Selection of parameters identification strategy
According to the simulation virtual prototype model established in “Establishment of simulation virtual prototype model” section, the output displacement, puncture force, and soft tissue shape variables are all continuous variables that change with time. To accurately identify the elastic coefficient k and viscosity coefficient c of the prostate soft tissue, an improved adaptive PSO based on Levy Flight algorithm is proposed for parameters identification. This strategy not only gives full play to the advantages of PSO to search local and global optimal solutions quickly, but also uses Levi flight strategy to prevent population particles from falling into local optimal solutions. Meanwhile, this strategy has a small amount of computation and is suitable for Matlab–Adams co-simulation analysis.
Identification principle of PSO
In the PSO algorithm, the elastic coefficient k and viscosity coefficient c of the prostate soft tissue can be divided into two groups (S), and each group consists of m particles, search in a two-dimensional space (S = 2). Where, the i-th particle is represented as an S-dimensional vector xi = (xi1, xi2, …, xiS), and the position of each particle is a potential solution. xi is substituted into the objective function, and the optimal solution is determined according to the fitness function value, so as to realize the parameter identification of the elastic coefficient k and viscosity coefficient c of the prostate soft tissue. In each iteration, the particle updates its velocity and position according to the following equation:


Therefore, to reduce the possibility of particles leaving the search space during evolution, Vis is usually restricted to a range.
Position update based on Levi's flight
Because the PSO algorithm has a fast convergence rate in the early stage of iteration and a slow convergence rate in the later stage, the particles are easy to fall into local extreme values.
27
Therefore, on the basis of PSO algorithm, Levy flight is used to make further judgment, and neighborhood search is performed for particles that have fallen into local extreme values. The updated equation is as follows:

According to the literature,
29
Levi's random number is calculated, and the position equation of Levi's flight update is obtained as follows:


Inertia weight value improved PSO algorithm
Inertia weight value ω is an important parameter of PSO algorithm, which is used to adjust the influence of the previous particle search velocity on the current particle search velocity. When ω is large, the global search ability of population particles is strong, and when ω is small, the local search ability of population particles is strong. Therefore, this article adopts the PSO algorithm based on adaptive inertia weights value, and its weight adjustment equation is as follows:

This strategy enables a single particle to select the appropriate ω value through each iteration update, so that the optimal balance between the global and local search ability of the population particles is achieved, and the PSO algorithm has a strong parameter optimization ability.
Establishment of fitness function
The PSO fitness function is used as the objective function to identify the elastic coefficient k and viscosity coefficient c of the prostate soft tissue. Since the simulation combined with the virtual prototype simulation model as shown in Figure 5, it is necessary to consider reducing the computational load and improving the operational efficiency and accuracy, so the absolute time integral performance index is adopted as the minimum fitness function for parameter selection, and its expression is as follows:

Steps of algorithm identification
Step 1: The initial values of the identification parameters are set. Step 2: The calculation parameters of PSO are initialized, and the initial position and velocity are set. Step 3: The fitness value of each particle is calculated. Step 4: The fitness value of each particle is compared with the fitness value of the best position Pis that it has experienced, and if it is better, it is taken as the current best position. Step 5: The fitness value of each particle is compared with the fitness value of the globally experienced best position Pgs, and if the fitness value is better, it is regarded as the current global best position. Step 6: The inertia weight value is updated according to Equation (14). Step 7: The velocity and position of the particle are updated according to Equations (9) and (10). Step 8: If the conditions are met, the solution is output. If the condition is not met, the particle position is updated according to Levi flight (Equations (11)–(13)). Step 9: The fitness value is evaluated by the PSO. Step 10: Back to step 8.
Simulation analysis of parameters identification
Selection of simulation parameters
Because the tip of the medical puncture needle is a conventional oblique flexible tip, if direct puncture causes the coupling force between the needle and the soft tissue, this will lead to the needle body deflection. To avoid deflection error on the analysis of “the axial compensation precision puncture control method”, this article conducted a simulation study of the puncture motion control based on the sinusoidal rotation puncture method and relative control parameters (rotation frequency, rotation angle, and puncture velocity) proposed in the literature.
30
Therefore, the motion parameters of the puncture device are as follows:
Rotation frequency: 1.32 Hz; Rotation angle: 202.88°; Puncture velocity: 12.3 mm/s; Puncture depth: 60 mm (refer to the general distance of human prostate soft tissue puncture
31
). PSO parameters:
Population dimension: S = 2; Population size: m = 100; Acceleration constant: c1 = 2, c2 = 2; Initial value of inertia weight value: ωmax = 1.2, ωmin = 0.2; Maximum number of iterations: Iter = 100; Minimum fitness value: Fit = 0.1. Levy flight parameters:
Step factor: α0 = 0.01; Levy parameter: β = 2. Selection of population range.
According to the literature,
30
the elastic modulus E of human prostate soft tissue ranges from [53.73, 105.45]Kpa. Therefore, according to Equation (16), the population ranges established by the elastic coefficient can be obtained:

Since the prostate soft tissue model is similar to the soft rubber model with high viscoelasticity, according to the literature, 31 the population range established by its damping coefficient is [0.1, 2]N/(m/s).
Process analysis of simulation identification
Matlab 2017a is used to write a program for parameter identification of the model. The shape variables generated by acupuncture soft tissue in the simulation identification process are shown in Figure 6, and the minimum value is used as the evaluation index of fitness function. Among them, the right color card in each figure shows the amount of deformation of soft tissue from blue (low) to high (red).

Diagram of soft tissue deformation by acupuncture: (a) puncture depth 10 mm and (b) puncture depth 40 mm.
From Figure 6(a) and (b), it can be seen that with the increase of the penetration depth of the puncture needle into the soft tissue, the shape variable caused by the soft tissue also gradually increases, and the largest shape variable appears near the tip of the needle, which confirms that the puncture needle can indeed cause deviation to the target point in the puncture direction during the puncture of the prostate soft tissue, thus affecting the treatment effect. In addition, to ensure the accuracy and effectiveness of the simulation results, the simulation identification times will be carried out multiple times. Meanwhile, in the Matlab workspace, it is necessary to record and save the simulation data in real time.
Analysis of identification results
As shown in Figure 7(a), by recording the change trend of the fitness function value of 30 simulation identifications with the number of iterations, it can be seen that the number of iterations calculated for each time is in complete convergence when it is from 10 to 16 times, and the optimal individual fitness value tends to be stable after reaching the minimum value.
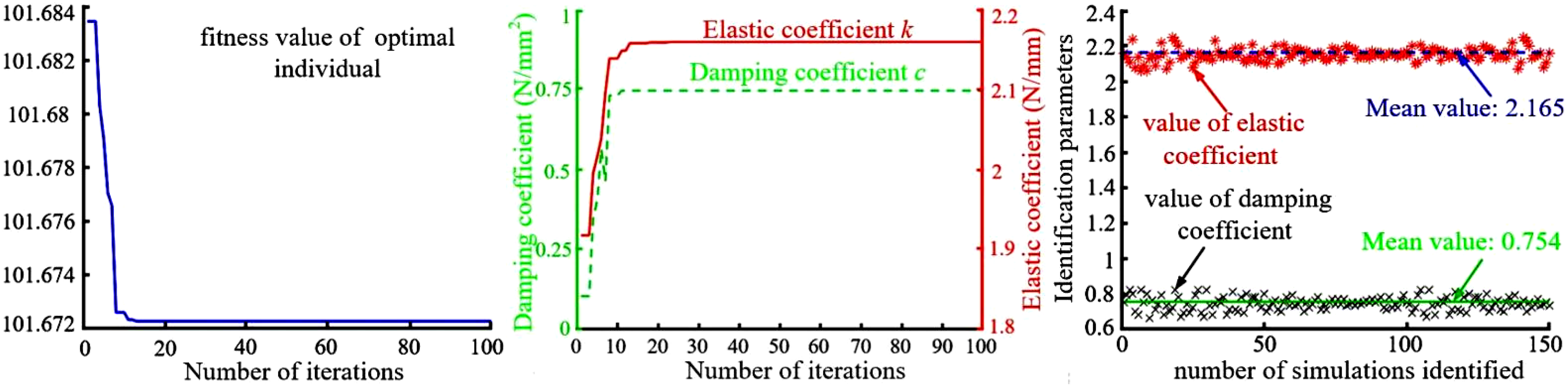
Analysis diagram of the identification results: (a) fitness function curve, (b) single change curve of parameters identification, and (c) parameters values is identified 150 times.
At the same time, as shown in Figure 7(b), the two parameters (the values of elastic coefficient k and viscosity coefficient c when the puncture needle moves with the prostate soft tissue) to be identified gradually approach the target value as the number of iterations increases (it is consistent with the number of iterations when the optimal individual fitness value is stable). This indicates that an improved adaptive PSO algorithm based on Levy Flight proposed in this article can well complete the Matlab–Adams co-simulation task, and has the characteristics of strong search ability, fast convergence velocity, and high calculation accuracy, which can ensure the accuracy of the identification of the elastic coefficient k and viscosity coefficient c of the prostate soft tissue.
Because the algorithm also has small local fluctuations when searching for the optimal solution, to ensure the accuracy of the parameters, the simulation process needs to be repeated several times. When the simulation identification process is repeated 120–150 times, the average values of the elastic coefficient k and viscosity coefficient c of the prostate soft tissue tended to be stable. Figure 7(c) shows the distribution trend of parameter values after 150 repetitions of simulation, the 150 groups of value points of the two parameters tend to the average value (the average sum of 150 groups of data for each parameter), so the optimal values of the two important parameters in puncture compensation control are determined by Equation (7). Where, the elastic coefficient k is 2.165 (N/mm) and the damping coefficient c is 0.754 (N.s/mm2).
Comprehensive experimental of an axial compensation precision puncture control in needle–tissue
To verify the validity of an axial compensation precision puncture control model established according to the biomechanical model of the prostate soft tissue, the rationality of the elastic coefficient and damping coefficient values of the prostate soft tissue obtained by establishing the Matlab–Adams virtual prototype model and the improved adaptive PSO algorithm based on Levy Flight is used. In this article, a prostate puncture robot is built to perform experimental analysis on axial compensation control of soft tissue puncture.
Experimental method and control principle
Experimental prototype, material, and method
Figure 8 shows the soft tissue experimental platform for puncture, and serial numbers 1–5 in Figure 8 respectively indicate: prostate puncture mechanical arm, terminal puncture device, vision sensor, prostate bionic soft tissue model, and laser generator. Among them, the composition structure of the terminal puncture device 2 is consistent with the structural model diagram shown in Figure 4, and its serial numbers (①–⑦) are: external needle, external needle rotating motor, six-dimensional force sensor, particle magazine, internal needle, internal (external) needle drive motor, and linear displacement sensor of external needle.
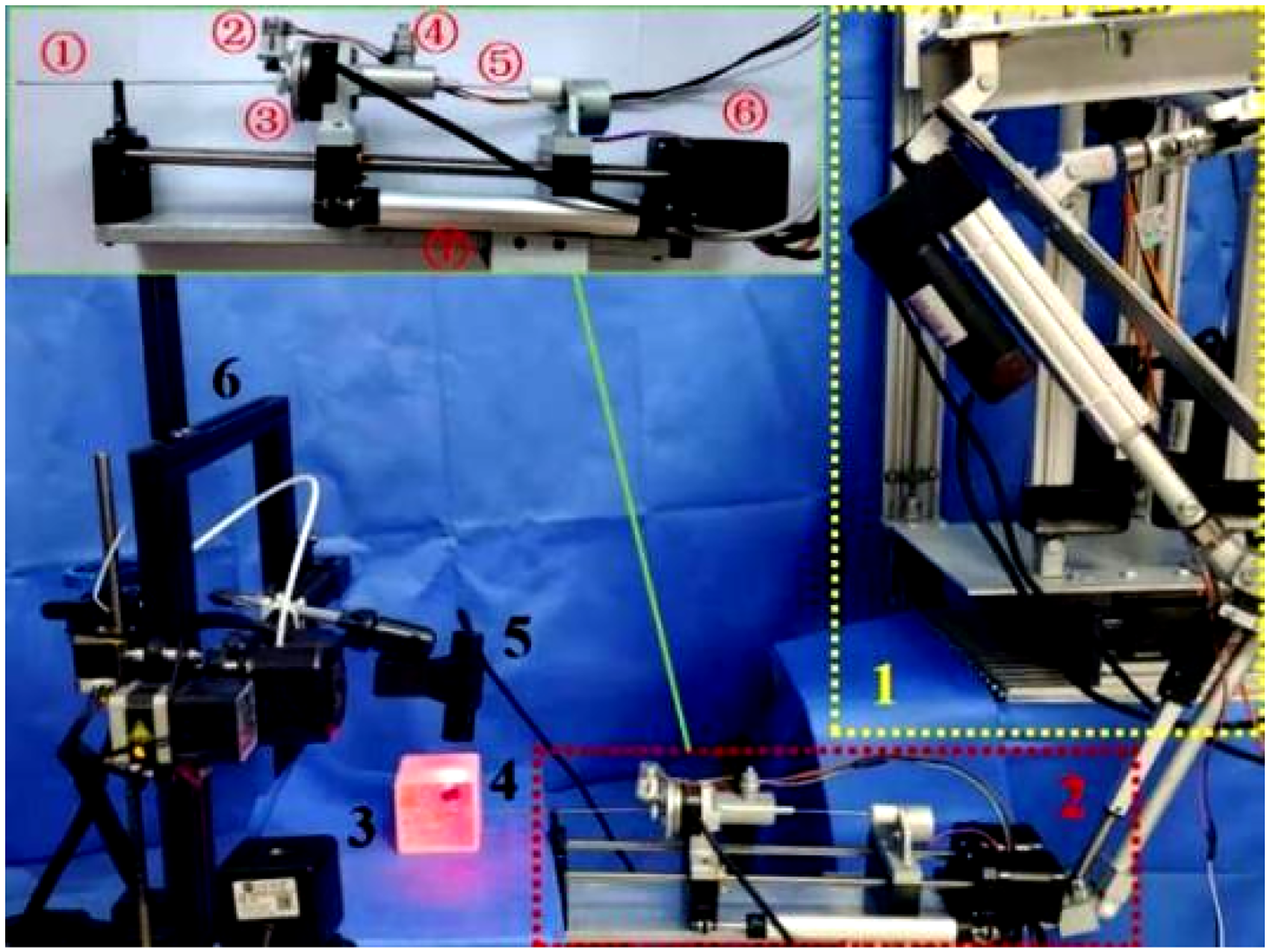
Structure diagram of experiment system.
To better simulate the soft tissue of human prostate, the bionic soft tissue model of prostate for experiment is made according to the literature. 22 The specific material selected is XB-0920 silica gel produced by Xubai New Material Co., LTD. When the target point is calibrated, glue A and glue B are mixed into half of the mold during preparation, cooled and solidified in the static state at room temperature, buried in the target point, and continued to pour the mixed solution. Meanwhile, several bionic prostate soft tissue models are compared according to the detection methods and elastic modulus parameters provided in literature, 23 and suitable models are selected for experimental analysis.
In addition, in order to better measure the displacement between needle and soft tissue and the deformation of soft tissue force during the experiment, this article adopts the laser ranging and positioning method provided in the literature 32 (“Monocular vision-laser ranging and positioning system” constructed by vision sensor and laser generator), and combines spatial convolutional neural network method to process visual signals. This method can accurately and reliably complete the visual measurement data needed in the experiment. Meanwhile, the processing algorithm of monocular vision-laser ranging and positioning is written, and debugged using Python3.7.9.
Axially compensated precision puncture control principle
The control principle of the puncture robot system for the prostate soft tissue used in the experiment is shown in Figure 9, and the control system structure of this robot adopts double-layer control model of the upper/lower computer. Where, ① represents the control software part of the upper computer, its control operation and monitoring interface are written by Simulink module of Matlab2016a, and it is mainly responsible for sending signal commands and operation of logical algorithm (transmission, storage, processing, and monitoring) data. Serial number ② represents the control hardware part of the lower computer; it uses “ADVANTECH PC104 control board” as the primary controller and operating system uses XPC system. This system can be well compatible with the related modules of Matlab/Simulink for embedded development, and it has fast operation velocity. It is used to control the feed and rotation motion of the puncture needle, collect signals data from various sensors, and transmission with the upper computer. The peripheral hardware components include: (1) “HIT-PC104-HTL-P515” as data acquisition card, it is used to collect the data information of various sensors, and data conversion between analog and digital quantities (A/D); (2) “HIT-PC104-HXL-P520” as a motion control card, it is used for D/A conversion to generate the actuating signal of the stepper motors, and transfer it to the actuator. The two modules shown in Figure 9, Analog Output of HIT-PC104-HXL-520 and DIO Input of HIT-PC104-HTL-515, represent both the hardware part and the S-Function driver modules; they are written based on Matlab2016a software and embedded C++ language. Serial number ③ represents the driving, execution, and sensor parts of the puncture device, mainly for soft tissue puncture operation and sensor data transmission.

Schematic diagram of puncture compensation control.
In addition, the input puncture displacement and velocity are controlled by incremental PID. p is the lead screw pitch; β is the stepper motor drive subdivision; φ is the step angle; ω is the angular velocity; tf is the frequency time; h(t) is the pulse function with respect to time t; A and C are the other two input terminals of HXL-520; B and D are the other two output terminals of HXL-520. M(x) is the compensation judgment function {when x1 < x0, M(x) = 0; when x1 = x0, M(x) = Δx}.
Meanwhile, when performing the puncture task, Δx is the input to the control part of the prostate puncture mechanical arm to compensate for displacement, and when Δx is positive/negative, the control needle of the prostate puncture mechanical arm compensates for the forward/backward displacement, and the positive/negative Δx depends on the force returned by the end of the six-dimensional force sensor to compare the force threshold; the force threshold can be set according to the different patients and the actual situation of the operation. In addition, the part of the overall axial compensation precision puncture control shown in Figure 9 can be regarded as a force closed-loop model, which can not only adjust the signal acquisition error of the terminal displacement sensor, but also stop the puncture needle when the puncture needle encounters the tissue exceeding the force threshold, thus achieving the force compliance control of the overall puncture robot system and ensuring the safety requirements of the puncture surgery.
Experimental analysis of puncture velocity with axial compensation
In the fourth section, the optimal parameters of an axial compensation precision puncture control method are to effectively identify its damping coefficients and stiffness coefficients under the condition of sinusoidal rotation puncture method. To verify the effectiveness and universality of an axial compensation precision puncture control method, based on the direct puncture method, the optimal puncture velocity affecting the axial positioning deviation is found, and preparations are made for subsequent experimental comparative analysis, verification of the effectiveness of an axial compensation precision puncture control method, and identification parameter values.
Theoretical analysis of the influence of puncture velocity
When the puncture needle is inserted into the soft tissue, due to its internal viscous damping effect on the needle, the greater the insertion velocity of the puncture needle in the soft tissue, the greater the puncture friction suffered by the needle rod and the greater the deformation variable of the soft tissue. 23 Meanwhile, if the insertion velocity of the puncture needle in the soft tissue is too low, the puncture needle and the soft tissue surface will be squeezed, and the needle body will easily generate greater puncture friction, which will cause greater deformation of the soft tissue. Therefore, the friction between the puncture needle and the soft tissue at low velocity is consistent with the Coulomb friction model, and the friction generated at high velocity is closer to the LuGre friction model. 33
At low velocity, because the deformation of soft tissue is the radius of the needle body, the puncture needle body per unit length does not change under the influence of pressure, so the equation can be expressed as:

At high velocity, the LuGre friction model is introduced; at a large puncture velocity (v0), the friction force is expressed as
22
:

According to Equations (17) and (18), when the robot punctures the prostate soft tissue, too high or too low puncture velocity will increase the puncture friction, resulting in the deformation of the prostate soft tissue, and then cause large axial positioning deviation of the puncture needle. Therefore, selecting the appropriate puncture velocity is the premise and basis to ensure the accuracy of axial compensation puncture positioning.
Experimental analysis of the influence of puncture velocity
Through the theoretical analysis of the influence of puncture velocity, it can be seen that only by selecting the appropriate puncture velocity during the puncture of prostate soft tissue can the puncture positioning deviation be reduced in the direction of puncture (axial direction).
The experiment mainly analyzed the influence of puncture velocity on the axial puncture deviation of the target point, so the puncture needle model used 18G standard medical puncture needle. However, the farthest distance from the prostate to the perineum of Asian adult males is about 60 mm, so the puncture depth of 50 mm will be selected in this experiment according to the actual operation requirements of prostate puncture surgery. Meanwhile, in the case of a constant puncture depth, the influence of puncture velocity on puncture deviation is analyzed, and the experimental index is the axial puncture deviation between the puncture needle and the target point. Among them, the puncture velocity is 2, 5, 10, 15, 20, 25, and 30 mm/s. Direct puncture method is used in the experiment.
Figure 10 shows the experimental results. It can be seen from the figure that under the same puncture depth, the axial puncture deviation of the target point will decrease with the increase of puncture velocity (between 2 and 10 mm/s), which is consistent with the previous theoretical analysis. However, when the puncture velocity is from 10 to 30 mm/s, the puncture deviation (experimental index) began to increase gradually.

Influence analysis of puncture velocity (2–30 mm/s).
Optimization of the best puncture velocity
According to the experimental analysis, the main factor affecting the amount of axial puncture deviation is puncture velocity, and according to Figure 10, it can be found that the variation range of the optimal puncture velocity is about 10–15 mm/s. However, such a discrete interval is relatively large, and it is not possible to choose a reasonable puncture velocity. Therefore, it is necessary to optimize and analyze it and find the optimal value of puncture velocity.
Therefore, since the adjustment accuracy of the velocity regulating device in the experimental mechanism is 0.1 mm/s, the puncture velocity (10–15 mm/s) is divided into 50 groups in the optimized experiment, and the experimental index is the axial puncture deviation value. Five experiments are conducted for each group, and the average value is taken; the experimental results are shown in Figure 11(a).

Influence analysis of puncture velocity (10–15 mm/s). (a) Experimental value and (b) fitted value.
It can be seen from the scatter of experimental data in the figure that the puncture velocity decreases first and then increases when the puncture velocity is within the range of 10–15 mm/s, which indicates that there is an optimal puncture velocity and the puncture deviation reaches the minimum value. Meanwhile, its minimum value is distributed in the puncture velocity range of 12–13 mm/s. Therefore, to further optimize processing, it is necessary to first connect the experimental data scatter points (as shown in Figure 11(b)), and then use the curve fitting toolbox cftool in Matlab2017 to fit the cubic spline interpolation curve “Polynmial” function; the function f(v) relationship between puncture velocity and puncture deviation value is established as follows:

Equation (19) has a confidence of 98%, R2: 0.9879 (approximately 1), and is very consistent with the data point line. Therefore, this article uses the improved adaptive Cuckoo–particle swarm optimization (CS–PSO) to solve the minimum value of equation (5–12) multiple times according to the puncture depth of 54–60 mm, and the optimal puncture velocity is obtained, as shown in Figure 12.

Puncture depth–puncture velocity influence distribution surface.
As can be seen from the distribution surface of influence of puncture depth–puncture velocity in Figure 12, if the direct puncture method is adopted, the optimal puncture velocity is in the range of 12.2–12.6 mm/s, and the axial puncture deviation is smaller than other puncture velocity. Therefore, in the simulation identification process, the puncture velocity selected in this article is 12.3 mm/s (which is also the optimal puncture velocity of sine rotation precision puncture), which is universal, and the parameters identification of an axial compensation precision puncture control model at this velocity can meet the effectiveness requirements.
So the experimental results effectively indicate that it is reasonable to select the puncture velocity of 12.3 mm/s according to the literature 23 for the simulation analysis and parameters identification of the soft tissue control compensation of acupuncture in this article. Meanwhile, it is found through experiments that the puncture speed in the range of 12.2–12.6 mm/s is the best speed for prostate puncture, and the axial compensation precision puncture control parameters optimized in this article (elastic coefficient k = 2.165 and viscosity coefficient c = 0.754) are applicable in this velocity range.
Comprehensive experimental analysis of axial compensation control in soft tissue puncture
The comprehensive experimental analysis of axial compensation control for soft tissue puncture includes: the experimental analysis of parameters identification, the experimental analysis of axial compensation positioning performance comparative, and the experimental analysis of different puncture depths comparative, so as to verify the effectiveness of the axial compensation puncture control method proposed in this article and the identification parameters, and to improve the puncture accuracy of the puncture needle in the direction of needle insertion (axial).
Experimental verification analysis for parameters identification
To verify the feasibility of using “Adams simulation model” and to identify parameters values of an axial compensation precision puncture control model, further parameter identification is carried out by combining Matlab with physical soft tissue through the lower computer controller. First, use the simulation virtual prototype model shown in Figure 5, and replace the “Adams Model” part with the object identification module shown in Figure 13.

Lower machine controller and object organization.
Then, combined with the simulation identification method, process, and parameters in Chapter 4, the experimental parameters identification is carried out. Among them, the physical tissue is bionic soft tissue and pig kidney, and the collection of soft tissue deformation is calculated according to the method proposed in the literature. 34 The soft tissues of the two kinds of objects are identified 20 times each, and the results are shown in Figure 14.

Diagram of experiment identification results: (a) Bionic soft tissue puncture experiment and (b) pig kidney puncture experiment.
As can be seen from Figure 14(a), in the 20 times of experimental identification of bionic soft tissue puncture, the values of elastic coefficient and damping coefficient are close to the simulated average value, with the maximum value of elastic coefficient being 2.418, the minimum value being 1.913, and the experimental average value being 2.157, which are close to the simulated average value and the error is 0.008. The maximum value of damping coefficient is 1.001, the minimum value is 0.521, and the experimental average value is 0.753, which is close to the simulation average value with an error of 0.001. As can be seen from Figure 14(b), in the 20 times of experimental identification of pig kidney tissue puncture, the values of elasticity coefficient and damping coefficient are also close to the simulated average value, the maximum value of elasticity coefficient is 2.631, the minimum value is 1.645, and the experimental average value is 2.133, which is close to the simulated average value with an error of 0.032. The maximum value of damping coefficient is 1.222, the minimum value is 0.296, and the experimental average value is 0.700, which is close to the simulation average value with an error of 0.054.
It can be seen from the experimental results that the parameters set by the biomimetic soft tissue material and Adams simulation model are basically the same, so the error is small. Meanwhile, although there are a few errors in the experimental identification results using pig kidney, the trend is basically consistent with the simulation results, which further demonstrates the validity of the simulation identification results.
Comparative experiment of axial compensation positioning performance
The comparative experiment of the axial compensation positioning performance is mainly to obtain the distribution interval of the axial puncture deviation value when the puncture needle penetrates the target point under a certain number of puncture times, and verify the effectiveness of an axial compensation precision puncture method. The experimental task is to observe and record the axial puncture deviation through the “monocular vision-laser ranging positioning system” under the condition of fixed puncture velocity and puncture depth, and the puncture coincidence rate is calculated according to its threshold value. Where, coincidence rate= number of puncture deviations below the threshold/total puncture number. The experimental method is to compare the precision control method with no/with axial compensation. Selection of puncture performance parameters:
The puncture velocity is selected at 12.3 mm/s. The direct without rotary puncture control method is selected. The puncture depth is selected at 30 mm.
According to the structural characteristics of the puncture needle and the effect of the puncture experiment, the puncture position basically coincides with the preset position when the axial puncture deviation is less than or tends to 0.5 mm.
Therefore, the axial puncture deviation of 0.5 mm is used as the threshold for the positioning performance experiment in this article. Figure 15 shows the experimental process. In the experiment, the red laser visual distance measurement and positioning system is used to track and measure the tip position of the puncture needle, real-time video data is transmitted back to the computer, the visual signal is processed in combination with the spatial convolutional neural network method, and the accurate movement displacement of the puncture needle is calculated in real time (keep five significant digits after the decimal point). In Figure 15, the upper part of the green border represents the size calibration, the green vertical line represents the dimensional raster display of the puncture position (where the display 50 mm represents the depth of the puncture 30 mm plus the distance between the initial position of the needle tip and the bionic soft tissue 20 mm), and the yellow box and the inner circle represent the needle point of the algorithm to identify the puncture needle (including the circles and dots of other embedded target points) and the position calibration. Among them, the regularity degree of the circles is indicated by color from low to high as white, dark yellow, red, and brown.

Diagram of positioning performance experiment process: (a) Without axial compensation and (b) axially compensated.
In Figure 15, as the distance between the bionic soft tissue edge and the visual detection edge is 20 mm, the actual puncture depth is 30 mm. The axial puncture deviation values of 20 puncture experiments are recorded, as shown in Figure 16.

Positioning performance test results.
As can be seen from Figure 16, the axial deviation value test results are accurately controlled without axial compensation range from 0.01858 to 1.83468 mm, and the number of times near or within the threshold in the 20 puncture experiments is 7. This phenomenon is caused by the lead deviation in position control and the recovery of soft tissue itself, so the puncture positioning effect of this method is unstable, and the coincidence rate is only 35%.
In addition, the experimental results of axial positioning deviation values with an axial compensation precision puncture control method are mainly distributed in the range of 0.02312–0.68713 mm, which are more concentrated than the axial deviation values without an axial compensation precision puncture control method. Meanwhile, the number of puncture experiments is 20 times, the number of times near and within the threshold is 16, the coincidence rate reached 80%, and the accuracy and reliability of the puncture positioning accuracy are significantly improved.
The experimental results show that an axial compensation precision puncture control method proposed in this article is effective for axial positioning compensation.
Comparative experiment of different puncture depth
To verify the effectiveness of the axial compensation precision puncture control method proposed in this article and the identified parameters, puncture experiments with an axial compensation precision puncture control method (parameter values of simulation identified are used) and puncture experiments without an axial compensation precision puncture control method are compared and analyzed at different puncture depths. In the puncture experiment, the sinusoidal rotation control method is selected (the puncture control method consistent with the simulation identification can effectively reduce the measurement interference of the puncture deviation angle on the axial puncture deviation when the depth of puncture is greater than 50 mm) to drive the puncture needle. The puncture velocity is selected as 12.3 mm/s, and the puncture depth is selected as 50–80 mm. The puncture target is bionic soft tissue of prostate, and the axial puncture deviation of particle position is measured by visual sensor. The experimental results are shown in Figure 17.

Analysis diagram of puncture depth influence.
It can be seen from the experimental results that the axial puncture deviation without an axial compensation precision puncture control method is between 1.58 and 2.15 mm during the bionic soft tissue puncture. In addition, the axial puncture deviation at the depth of 55–60 mm is consistent with Figure 12, which verifies that the experimental results shown in Figure 17 can represent the changing trend of axial puncture deviation at different puncture depths. Meanwhile, the axial puncture deviation (0.54–0.62 mm) using an axial compensation precision puncture control method proposed in this article is significantly smaller than the experimental results without an axial compensation precision puncture control method, and the axial puncture deviation changes more smoothly with the increase of puncture depth.
Therefore, the experimental results further demonstrate the effectiveness and reliability of the axial compensation precision puncture control method and identification parameters proposed in this article, which can better improve the accuracy of puncture and ensure the treatment effect.
Discussion
At present, in the clinical treatment of prostate cancer, there are mainly chemotherapy, radical resection, and radiotherapy. Although chemotherapy is inexpensive, it has problems such as a long treatment cycle, severe side effects, and a painful treatment process, which can easily cause irreversible harm to patients. 35 In addition, radical resection surgery is also adopted in clinical practice, but it causes significant surgical trauma and is prone to postoperative complications and functional deficiency diseases.36,37 So particle implantation therapy is a common treatment method for the clinical treatment of prostate cancer, 38 so the research content of this article is mainly aimed at the puncture control of prostate cancer. Although the axial compensation precision puncture control model itself is universal, its precision puncture control parameters are mainly targeted at the identification of prostate properties with cancer.
In the follow-up research, it is necessary to develop a puncture control algorithm suitable for other soft tissues with pathological changes in the human body, so that its control parameters can be optimized and adjusted to the optimal parameters in real time according to the soft tissues with different elastic modulus and different forces generated by the puncture needle, make the axial compensation precision puncture control method studied in this article truly universal to the soft tissues of different lesions and different parts of the human body, improve the positioning accuracy of the human soft tissue puncture, and ensure the treatment effect.
Conclusion
This article mainly studies and solves the problem of axial positioning deviation between the puncture needle and the target point of the prostate soft tissue, and an axial compensation precise puncture control method is proposed, thereby improving the axial positioning accuracy of the puncture needle in the prostate soft tissue. The main conclusions are as follows:
The position action relationship between the puncture needle and the target point is analyzed during the puncture of the prostate soft tissue, and an axial compensation precision puncture control model is obtained by establishing the biomechanical Kelvin model and the interaction force model between the puncture needle and the soft tissue for force analysis. Meanwhile, in this article, an improved adaptive PSO algorithm based on Levy Flight and Matlab–Adams co-simulation mode are used to identify the parameters of an axial compensation precision puncture control model, and the optimal values of the parameters of an axial compensation precision puncture control model are obtained. Among them, the elastic coefficient k is 2.165(N/mm) and the damping coefficient c is 0.754(N.s/mm). In this article, the prostate puncture robot is used for experimental analysis of puncture velocity with axial compensation, experimental verification analysis for parameters identification, comparative experiment of axial compensation positioning performance, and comparative experiment of different puncture depth. The experimental analysis of puncture velocity with axial compensation shows that the puncture velocity range of 12.2–12.6 mm/s is the best velocity for prostate puncture, and the axial compensation control parameters optimized in this article are applicable within this velocity range. Through the experimental verification analysis for parameters identification, it is obtained that the experimental analysis results are basically consistent with the trend of simulation identification, indicating that the simulation identification parameter results (two important parameters in the axial compensation puncture control model: the elastic coefficient k of 2.165 (N/mm) and the damping coefficient c of 0.754 (N.s/mm)) are effective and universal for the axial compensation control of the soft tissue of prostate. According to the analysis of comparative experiment of axial compensation positioning performance, the accuracy and reliability of the puncture positioning accuracy have been significantly improved (the coincidence degree between the target point and the puncture needle tip has been increased from 35% to 80% of the direct puncture). In addition, in the comparative experiment of different puncture depth, the experimental results verified the axial compensation puncture control method proposed in this article, and its axial puncture deviation was significantly smaller than that of the precise control method without axial compensation, and with the increase of puncture depth, its axial puncture deviation tended to change more smoothly.
Footnotes
Acknowledgments
In the related work of this research, I would like to thank Professor Zhu Junwu for the support of software simulation, and Professor Yuan Lipeng for the help of experimental equipment and guidance of experimental process.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article. The authors declared that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Zhang Yongde (grant number: 52275015).
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.