
Abstract
The traversability of the terrain ahead of planetary rovers significantly impacts the success of their extraterrestrial exploration missions. Accurate perception of the terrain force through a forward wheel-on-limb detection system can provide crucial data for assessing the traversability of the terrain ahead. Existing constant force control methods, largely based on static terra mechanics models, struggle to meet the operational needs of planetary rovers in unknown environments. To address this issue, this paper proposes an improved adaptive impedance control method for robotic arms in unknown soft terrain. First, a dynamic soft terrain model is established to simulate the unknown soft terrain environment. Based on this model, an improved adaptive impedance control method is designed, and its stability is rigorously proven. The proposed method is then comprehensively validated through simulation experiments, hardware-in-the-loop tests, and experiments using a planetary rover model in flat, inclined, and curved terrain scenarios. Experimental results demonstrate the effectiveness of the designed adaptive impedance control method.
Keywords
Introduction
The planetary rover, as a crucial vehicle for deep space exploration missions, often encounters challenges such as wheel sinkage and slippage during task execution. 1 These issues significantly reduce its traversability on extraterrestrial planetary surfaces, consequently affecting the completion of deep space exploration missions. The forward wheel-on-limb detection system, represented by the wheeled bevameter, 2 addresses the problem of visual blind spots inherent in traditional visual detection methods, making it a key focus of current research.
The forward wheel-on-limb detection device mounted on the planetary rover consists of a leg mechanism and a forward sensing wheel. The leg mechanism, often represented by a robotic arm, allows the device to follow the terrain and maintain constant force tracking control, while the forward sensing wheel collects real-time data on wheel-terrain interaction forces and torques, as shown in Figure 1. These data are crucial for assessing the traversability of the terrain ahead, providing necessary support for the rover's navigation decisions. Due to the extremely slow movement of planetary rovers (e.g., the Zhurong rover's average speed is approximately 1.1 cm/s), this forward wheel-on-limb detection equipment can thoroughly sense the wheel-terrain interaction information of the surface ahead, thereby providing real-time data for determining the traversability of the upcoming terrain. Research on forward wheel-on-limb detection devices has been explored by several scholars. Richter et al. 2 first proposed the concept of a forward wheel-on-limb detection device in the European Space Agency's FASTER project, although the technical specifics were not disclosed. Zhang et al. 3 later proposed a wheel-on-limb device comprising a force-controlled robotic arm and a wheeled bevameter. The device was established to simulate traditional ground mechanics tests by applying vertical loads to the wheeled bevameter through the force-controlled robotic arm, with experiments validating the effectiveness of the proposed device. Feng et al. 4 developed a forward wheel-on-limb detection system featuring a linkage mechanism and a wheel force sensor for real-time terrain traversability assessment. The linkage mechanism facilitated terrain following, while the wheel force detector gathered the data of the real-time wheel-terrain interaction forces, with experiments confirming its effectiveness.

Forward wheel-on-limb detection device.
The aforementioned studies suggest that the forward wheel-on-limb detection device represents the most promising solution for evaluating terrain traversability in planetary rover missions. In addition to accurately sensing the wheel-terrain interaction force, a key design requirement is the ability of the support leg mechanism to follow the terrain contours accurately while maintaining constant force tracking control. This requires a flexible robot arm that can follow the terrain in real-time and maintain constant force tracking on the forward sensing wheel to ensure the accurate acquisition of terrain data. Note that the reason for maintaining constant force tracking is to apply a fixed load to the forward sensing wheel through the robot arm to simulate the rover's traversal over the terrain ahead.
The implementation of a constant force control method for the forward wheel-on-limb detection device primarily involves designing corresponding control methods for leg mechanisms, represented by robotic arms. Common force and position control methods for robotic arms mainly include force/position hybrid control and impedance control. Force/position hybrid control achieves precise control of the robotic arm through specific trajectories (position control) and specific force feedback information when in contact with the environment. 5 Impedance control, on the other hand, realizes force and position control of the robotic arm through its dynamic characteristics. Although slightly less precise than force/position hybrid control, impedance control is more robust to variations in environmental conditions, making it well-suited for applications in uncertain environments.6,7 Since the working environment of the forward wheel-on-limb detection system is an unknown environment, impedance control is adopted to achieve force and position control of the robotic arm. To improve the accuracy of impedance control, two mainstream improvement approaches are employed: the environmental parameter correction method and the variable impedance method. The environmental parameter correction method estimates external environmental parameters using existing information through designed methods. Jing et al. 8 proposed an adaptive dual-loop impedance control method, using a combination of inner and outer loops to achieve correction of environmental information, proving the effectiveness of the proposed method through experiments. Tsuji et al. 9 developed an online environmental stiffness parameter estimation method based on environmental noise changes, also proving successful through experimentation. Additionally, Roveda et al. 10 designed two extended Kalman filters to estimate interaction forces and environmental stiffness, validating the proposed control method by deploying it on the ‘Franka EMIKA Panda’ robotic hand. The variable impedance method adapts the impedance controller to unknown environmental stiffness and positions by designing impedance parameter adjustment rules. Hamedani et al. 11 proposed an intelligent impedance control-based wavelet neural network for tracking dynamic contact forces in robotic arm position environments. This method achieves dynamic adjustment of impedance parameters through the online adaptive mechanism of the wavelet neural network, proving its effectiveness through simulation and physical experiments. Zhai et al. 12 embedded neural networks into classic adaptive impedance controllers to optimize impedance control parameters, validating the proposed method through experiments. Additionally, many scholars have used methods such as iterative learning, 13 reinforcement learning, 14 and inverse reinforcement learning 15 to achieve adaptive adjustment of impedance parameters in unknown and variable environments.
Despite these studies on robotic arm impedance control methods, directly applying existing methods to unknown extraterrestrial soil conditions still presents the following challenges:
Most existing research is based on terrain mechanics models established for rigid environments, which do not apply to soft terrain scenarios. Environmental parameters and terrain mechanics model parameters for soft terrains like soft terrains are largely unknown and non-static, making it difficult to establish accurate and reliable impedance models using methods that correct external environmental parameters. Existing variable impedance control methods lack theoretical stability analysis for robotic arms under unknown soft terrain conditions, making them challenging to apply directly for constant force tracking control in such environments.
In this paper, we introduce an adaptive impedance control method specifically designed for robotic arm force control to achieve constant force tracking on soft terrain. Unlike existing control methods based on static terra mechanics models, our method first thoroughly considers the soft terrain environment and establishes a dynamic soft terrain model. Based on this terrain model, we design an adaptive impedance control method for the robotic arm to maintain constant force tracking. The stability of the proposed method is rigorously proven, and its effectiveness is demonstrated through a series of experiments.
The main contribution in this paper as follows:
The remainder of this paper is organized as follows: Section 2 details the design of a dynamic mechanical model for soft terrain and outlines the framework for constant force tracking of the forward wheel-on-limb detection device. Section 3 introduces the proposed adaptive variable impedance control method and provides a comprehensive stability analysis. Section 4 presents the simulation and physical experiments conducted to verify the effectiveness of the proposed constant force control method. Finally, section 5 concludes the paper with a summary of the method. For the convenience of reference, we have organized the symbols used in the text, as shown in Table 1.
Symbol description.

Robot arm constant force tracking control framework
In this section, we first introduce the proposed constant force tracking control framework for the robotic arm in the forward wheel-on-limb detection device. Next, we present the proposed planetary terrain mechanics model. Finally, we discuss the common impedance control method and its associated challenges when applied to unknown soft terrain environments.
Constant Force Tracking Control Framework for Forward Wheel-On-Limb Detection Device
To achieve constant force tracking control of the forward wheel-on-limb detection device, we designed a control framework that adjusts the robotic arm's end position of the robotic arm based on the wheel-terrain contact force tracking feedback, as shown in Figure 2.

Constant force tracking control framework of forward wheel-on-limb detection device.
The specific process of constant force tracking control described in Figure 2 is as follows:
The difference between Superimpose the expected position The robotic arm position controller employs a PD closed-loop control method with x as the input to control the movement of the arm's end-effector. Due to inherent errors in the system, the actual position of the end-effector is denoted as Using
The above steps are repeated until e reaches a specified threshold, thereby achieving constant force tracking of the robotic arm.
Soft Terrain Modeling
Unlike traditional static terrain mechanics models with known terrain parameters, such as those by Bekker and Wong-Reece,16,17 the soil parameters of soft terrain are unknown, and the terrain sensing process in front of the rover is dynamic. Therefore, based on the research of Gibbesch et al.,
18
this paper constructs a dynamic mechanical model of soft terrain, as shown in Figure 3. In this model, 



Dynamic mechanical model of soft terrain.
Due to the presence of nonlinear components in equation (3), it is challenging to use this equation for proving the stability of the subsequent constant force tracking control method. Therefore, it needs to be linearized. Considering that in a stable working state, the wheel sinkage no longer changes, i.e., 


Impedance Controller
As mentioned in the introduction, the impedance control method is optimal for constant force control of the forward wheel-on-limb detection device equipped on planetary rovers in soft terrain environments. As shown in Figure 4, the core concept of impedance control is to equate the robotic arm system to a desired impedance model, specifically a ‘mass-spring-damper’ model. The input to this model is the difference E between the actual trajectory X and the desired trajectory 

Impedance control model.
For ease of analysis, we typically simplify the three-dimensional impedance model to a one-dimensional impedance model. In this simplified model, M, B, K, E and 
Proposed method
Adaptive Impedance Control Method
When implementing constant force control of a robotic arm in unknown extraterrestrial soil environments, we need to consider two key factors: the surface mechanical parameters of the soft terrain and the flatness of the soil surface. In real-world scenarios, both the ground mechanical parameters and the surface flatness of soft terrain are often unknown. To address this problem, we first introduce the adaptive impedance control method for flat soft terrain conditions. Building upon this, we then present the adaptive impedance control method for uneven soft terrain conditions.
Constant force control of robotic arm on soft terrain
The challenge of achieving constant force control of a robotic arm on a flat extraterrestrial soil surface arises from the unknown mechanical parameters of the soil, namely the equivalent stiffness coefficient 


Constant force control of robotic arm on uneven soft terrain
The adaptive impedance control method proposed in the previous section is only effective when the soft terrain surface is flat, i.e., when 

Stability Analysis of Constant Force Control System
In this section, we first introduce the state equation of the constant force control system for the robot arm. Subsequently, based on this state equation, we prove the stability of the designed constant force control system and determine the range of values for
Constant force control system state equation
In the unknown soft terrain surface, besides the difficulty in obtaining its mechanical parameters, the desired trajectory 










Stability proof of the constant force control system
When the input is a step function, with 
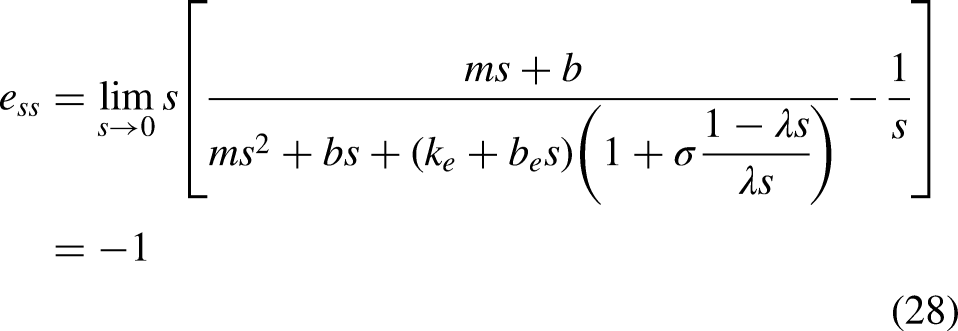

Solution for the range of
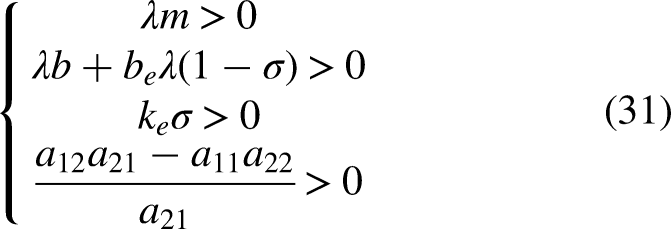
Under the condition of stability in the constant force control system, the range of σ is determined using the Routh-Hurwitz criterion. Firstly, the Routh table constructed from equation (26) is shown in Table 2.
Here,
Routh-Hurwitz criterion table.

Typically, for 


Experimental verification
To validate the performance of the proposed adaptive impedance control method, simulation experiments were designed based on three scenarios: soft terrain surface as a flat plane, soft terrain surface as a downward slope, and soft terrain surface as a curved surface. Concurrently, semi-physical and physical model experiments were designed to further verify the performance of the proposed control method.
Simulation Experiment Verification
To validate the constant force tracking control performance of the robotic arm in unknown soft terrain environments, a Simulink simulation platform for constant force control of the robotic arm was constructed, as shown in Figure 5. This platform mainly consists of an adaptive impedance controller, a robotic arm position control module, a soft terrain surface mechanical parameter setting module, and a wheel-terrain contact force calculation module. The adaptive impedance controller is constructed using equation (15). The robotic arm position control module is used to simulate the end-effector control of the robotic arm. The soft terrain surface mechanical parameter setting module simulates the soft terrain surface by adjusting mechanical parameters. The wheel-terrain contact force calculation module is designed based on equation (10).

Simulink simulation block diagram.
Due to the
Next, we will simulate and test the performance of the designed constant force tracking control method through different scenarios:
Flat soft terrain environment
Set the soft terrain surface position to 0 cm, and the initial position of the robotic arm end-effector to 

Variation of wheel-terrain contact force in flat simulation experiment.
Based on the above analysis, although both the traditional impedance control method and the proposed adaptive impedance control algorithm achieve impedance adjustment within
Downward sloping soft terrain environment
The soft terrain surface position is set to

Variation of wheel-terrain contact force and robotic arm position in inclined plane simulation experiment.
Comparison table of control effects of inclined plane simulation experiments.

Based on the above analysis, the designed adaptive impedance method demonstrates superior constant force control performance for the robotic arm in downward-sloping soft terrain environments compared to the traditional impedance method.
Curved soft terrain environment
The soft terrain surface position is set to

Variation of wheel-terrain contact force and robotic arm position in sinusoidal surface simulation experiment.
Comparison table of control effects of sinusoidal surface simulation experiments.

In summary, for soft terrain environments with unknown stiffness and damping coefficients, including flat surfaces and downward slopes, the adaptive variable impedance control method can achieve stable force tracking effects. As the soft terrain surface becomes more complex, the adaptive variable impedance control also shows some force tracking deviations. However, compared to the traditional impedance method, the steady-state force deviations are smaller, and the constant force control performance of the robotic arm is superior.
Semi-physical Verification
To further validate the feasibility of the designed constant force control method for the robotic arm, we designed a semi-physical experiment based on the forward wheel-on-limb exploration system shown in Figure 9. This system consists of a robotic arm, slip ring, encoder, and forward sensing wheel. The robotic arm's end-effector is connected to the forward sensing wheel, which contains a multi-dimensional force sensor to collect wheel-terrain interaction forces in front of the planetary rover. The collected data is transmitted to the upper computer through the slip ring using CAN communication protocol with a
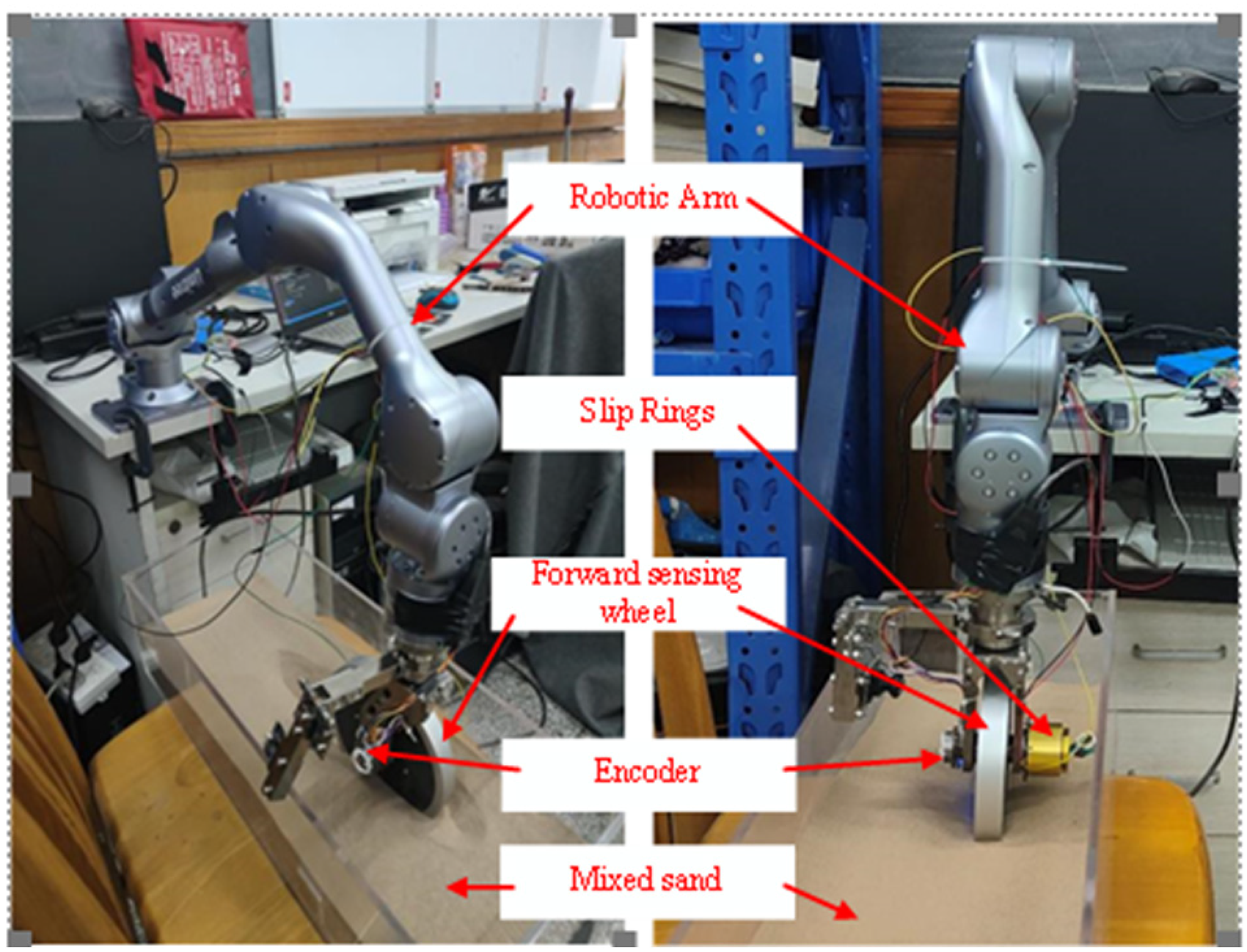
Semi-physical experimental platform.
To better simulate the constant force control scenario of the robotic arm during planetary rover exploration, we use a uniform lateral movement of the robotic arm to simulate its motion following the rover. The desired contact force
Flat soft terrain testing
The mixed sand in the soil bin test platform was spread out evenly with a thickness of
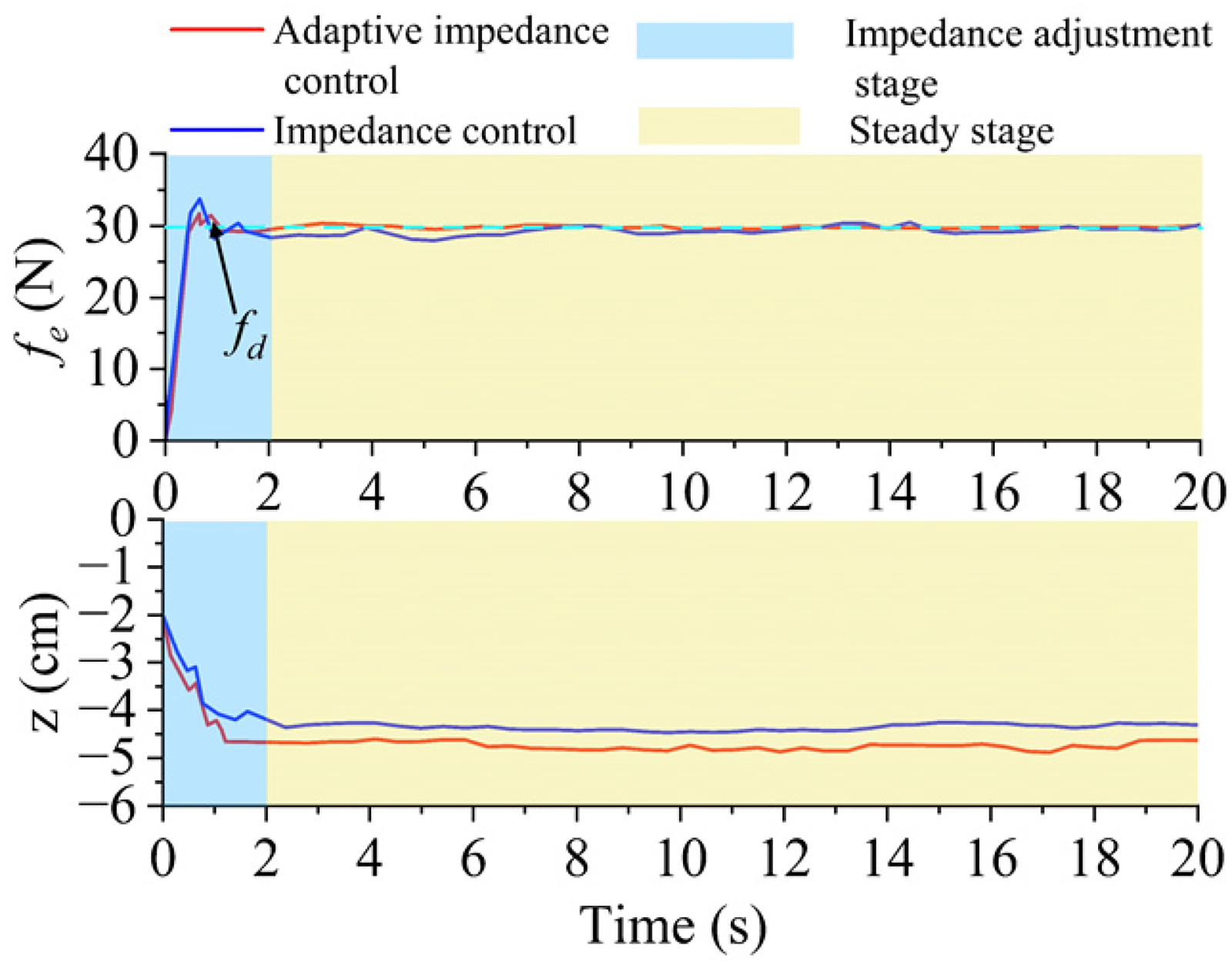
Variation of wheel-terrain contact force and robotic arm displacement in planar experiment.
In summary, the designed adaptive impedance control method meets the actual precision requirements for collecting wheel-terrain interaction forces on flat soft terrain and outperforms the traditional impedance method.
Downward slope soft terrain testing
Fine sand was spread in the bin to form a slope for conducting the constant force-tracking experiment with the robotic arm. Figure 11 shows the wheel-terrain contact force and the position changes of the robotic arm. The initial position of the robotic arm end-effector is set to

Variation of wheel-terrain contact force and robotic arm displacement in inclined plane experiment.
In summary, compared to the flat environment, although the stability of constant force tracking by the designed adaptive impedance method for the robotic arm slightly decreased in the sloped environment, it still showed significant performance improvements compared to the traditional impedance control method.
Physical Verification
We designed a planetary rover model based on the original experimental platform to conduct on-site constant force tracking tests as shown in Figure 12. This device is powered by a

Forward terrain sensing system assembly in rover's model diagram.
The unknown soft terrain environment was simulated using random sandy terrain. The rover's constant speed was set to

The result of field tests of the designed control method and the traditional impedance control method.
Conclusion
The traversability of the terrain ahead of planetary rovers relies on an accurate perception of the forward terrain. The forward wheel-on-limb detection system, composed of a robotic arm and a forward sensing wheel, serves as crucial equipment for detecting terrain environment ahead of the rover. The stability of this system directly affects the prediction of terrain traversability. To address this problem, we have designed an improved adaptive constant force tracking control method for robotic arms in unknown soft terrain. First, considering the unknown characteristics of soft terrain mechanics parameters, we developed a dynamic terrain mechanical model. Based on this model, we designed an improved adaptive impedance control method for the robotic arm tailored to soft terrain and provided rigorous proof of its stability. Finally, we validated the proposed constant force control method through a comprehensive set of experiments, including simulation experiments, hardware-in-the-loop tests, and experiments using a planetary rover model in flat, inclined, and curved terrain scenarios. The experimental results demonstrate the effectiveness of the designed constant force control method. This paper contributes to enhancing the reliability and accuracy of terrain perception for planetary rovers, potentially improving the success rate of extraterrestrial exploration missions.
Footnotes
Acknowledgement
All authors agree to the publication of the paper. Lixin Jia, Lihang Feng, Jiantao Shi, Dong Wang, Guangming Zhang, Chun-Yi Su.
Author contribution statements
Lixin Jia: Idea proposer, Specific implementer, Paper writer.
Lihang Feng: Idea proposer, Project Supervisor, Paper Reviser
Jiantao Shi: Paper Reviser
Dong Wang: Paper Reviser
Guangming Zhang: Paper Reviser
Chun-YI Su: Paper Reviser
Declaration of conflicting interests
The author(s) declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: Dear editor, Neither the entire paper nor any part of its content has been published or has been accepted elsewhere. It is not being submitted to any other journal. All authors listed on the title page have read the manuscript and I attest to the validity and legitimacy of the data and its interpretation, and agree to its submission to your journal.
Ethic
Ethical approval and informed consent statements: This article does not involve any ethical or moral issues.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by Natural Science Foundation of China (62103184) and the Postgraduate Research & Practice Innovation Program of Jiangsu Province (KYCX24_1599). The Postgraduate Research & Practice Innovation Program of Jiangsu Province, National Natural Science Foundation of China, Jiangsu Provincial Science and Technology Plan (grant number KYCX24_1599, 62103184, BZ2024057).
Data availability statement
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.