
Abstract
In this article, considering uncertainty and nonlinearity factors, the resonance phenomenon of conveyance is studied and a fuzzy adaptive back-stepping controller is proposed for rope lifting system with time-varying length and distributed parameters. Firstly, the dynamic model is constructed and derived by continuum mechanics, and the dynamical behavior is obtained by time-frequency analysis method. Secondly, the fuzzy adaptive back-stepping control method is proposed to suppress nonstationary vibration. Thirdly, based on Lyapunov function, the asymptotic stability of the system under the proposed control algorithm is verified. Finally, compared with proportion–integration–differentiation (PID) back-stepping controller, the efficiency of the proposed controller is proven by applying excitation with different frequency and uncertain parameters, and the adaptability and robustness are illustrated to validate under mixed frequency disturbance by simulation compared with PID back-stepping controller. Based on the dynamical behavior analysis and control method proposed in this article, the robustness of vibration controller of time-varying lifting system under uncertain nonlinear time-varying disturbance will be greatly improved.
Keywords
Introduction
Considering the advantages of heavy load and large lifting depth, rope lifting system is widely used in many lifting fields. As shown in Figure 1, the time-varying lifting ropes drive conveyances to move up and down by frictional force. However, caused by the excitation disturbance at drum boundary, there will be large vibration occurred at the conveyance due to the elastic rope spanning a long distance.1–4 The system will resonate obviously when the natural frequency 5 and excitation frequency are superimposed. 6 Therefore, it is necessary to propose an effective method to control resonance. 7 Considering that the lifting system is a variable length lifting system with distributed mass, the mathematical model is based on the governing equations and boundary conditions, which will contain coupled partial differential equations and ordinary differential equations with geometric boundary conditions. At present, the research on dynamical behavior analysis and control of rope lifting system mainly focuses on active control, passive control, and dynamic solution method. As for the active vibration control, considering the application of control input, boundary control is a good control measure. 8 The boundary control of distributed parameter control system is studied by many researchers.9–26 Considering the uncertainty of disturbance, neural network has been used as a compensator to compensate the disturbance term of the system normally.13–17 Considering the nonlinear terms in differential equations, back-stepping controller is used to achieve hierarchical static compensation as a common control method.12,18 As for the transverse vibration control of flexible structure with fixed length and time-varying disturbance, many scholars have proposed a variety of methods. A method combining sliding mode control (SMC) and positive position feedback control is proposed to control of beams subjected to a moving mass. 19 Considering the speed of the axis of the string, a novel control algorithm that uses the effects of the time-varying axial transport velocity based on the regulation of the axial velocity to suppress the transverse vibration of an axially moving membrane was developed.20,21 Considering unknown disturbance, robust adaptive boundary control is developed for a class of flexible string-type systems under unknown time-varying disturbance. 22 Considering time-varying disturbances and input constraints in the system, adaptive iterative control learning 23 and model predictive control 24 are applied to dynamic control and vibration control of flexible bodies, which achieved quite good control effect. As for passive vibration control, some scholars have constructed passive control methods for flexible body vibration control through frequency modulation mass damping systems and verified the effectiveness of vibration control through experiments. 25 Meanwhile, some experiments were conducted to control vibration through flexible bodies. 26 As for the dynamic solution method, there are also many researches about the methods to solve the vibration response of lifting systems.1–7,27–30 Assumed mode method, finite element method, mode superposition method, multi-scale analysis method, and absolute node coordinate method are all used to solve the dynamical response of time-varying lifting system.1–7 Korayem et al.27–30 have proposed effective solutions and methods for solving the dynamic characteristics, path planning, and motion control of cable suspended parallel and flexible manipulator system.

System description of traction system with controller.
From above research, researches are focused on the control of time invariant rope lifting system with fixed length and varying velocity, which the time-varying mass and the nonlinear boundary excitation was not considered. The characteristics of time-varying mass and stiffness coefficients of the time-varying lifting system inevitably require the controller to be highly adaptive,12,18 while the uncertainty of platform parameters and unknown nonlinear disturbances require the controller to be robust and stable. In addition, due to the uncertainty and nonlinear of system parameters and disturbances, the control modeling and numerical solution of the rope lifting system will be more difficult. As for the real applications of the vibration control of flexible body, there are some studies on this. A passive control method to increase the tension wire rope device and an active control method to dissipate the energy of the lifting system are proposed to suppress the vibration of the lifting system. 31 An active control strategy based on the fuzzy SMC is developed for controlling the large-amplitude vibrations of an extending cable. 32 Do and Pan 33 present a design of boundary controllers actuated by hydraulic actuators at the top end for global stabilization of a three-dimensional riser system. Fang et al.34,35 concentrate on the control issue of a variable length drilling riser under condition of unknown disturbances and output constraint.
In this article, considering the nonlinear excitation and uncertain disturbance, a mathematical control model of time-varying lifting system is established based on the Hamilton's principle. The fuzzy system and nonlinear disturbance observer are introduced to compensate the uncertain and mixed disturbances. Through back-stepping controller, the control law is designed for the lifting system with time-varying length and distributed parameters. The application of the fuzzy adaptive back-stepping controller provides guidance for vibration control and resonance elimination for the lifting system with time-varying length and distributed parameters.
This article is divided into four parts. The first part is about the introduction. The main purpose is to summarize and introduce the research background, significance, and related main content of the article. The second part is the problem formula. The main task is to construct a dynamic control model, propose relevant vibration control methods, and analyze the stability of the designed control rate. The third part is simulation, which mainly verifies the effectiveness and robustness of the fuzzy adaptive back-stepping control method proposed in this article, and compares it with the results of the control without control and proportion–integration–differentiation (PID) control, further demonstrating the progressiveness and effectiveness of the control algorithm proposed in this article. The fourth part is a summary, which summarizes the main research results and innovative points of this article.
Problem formulation
Mathematical model
As Seen in Figure 1(a), the time-varying lifting system is composed of five parts: lifting rope, conveyances, compensating rope, guide, and driving drum. Here, three-axis acceleration sensors and rotation sensors are installed on the lifting conveyance to monitor the vibration acceleration and rotation degree of conveyances and feedback to the controller. The vibration speed and displacement of the system are obtained through integral operation. Based on the control algorithm, the output of the controller is calculated by simulation and comparison.
The actuator of controller is shown in Figure 1(b). The fixed pulleys are fixed on the platform, which plays the role of clamping rope. Then, the movement of the hydraulic cylinder drives the moving pulleys to move horizontally. The vertical displacement of the conveyance is controlled by the pulling of the moving pulleys and the coordination of the fixed pulleys.
Firstly, the kinetic energy and potential energy of the time-varying length lifting system are derived, in which the longitudinal vibration of the lifting rope, conveyance, and controller are considered. The specific expression is as follows:







The expression of gravitational potential energy of lifting system is







Constraint relationship

Preliminaries
To design the control law and prove the feasibility, preliminary theorems should been given firstly. In this section, some related concepts are given to explain the following research.
Law 1: Considering the energy of disturbance
Law 2: Distribution force
Law 3: The initial state value of the lifting system is bounded in norm
Law 4:
In Figure 2, the design process of system boundary control is shown.

Design process of control law.
In Figure 3, the design process of the control law is shown. Boundary control law and stability analysis are designed by Lyapunov function, which is constructed to realize the output constraint.
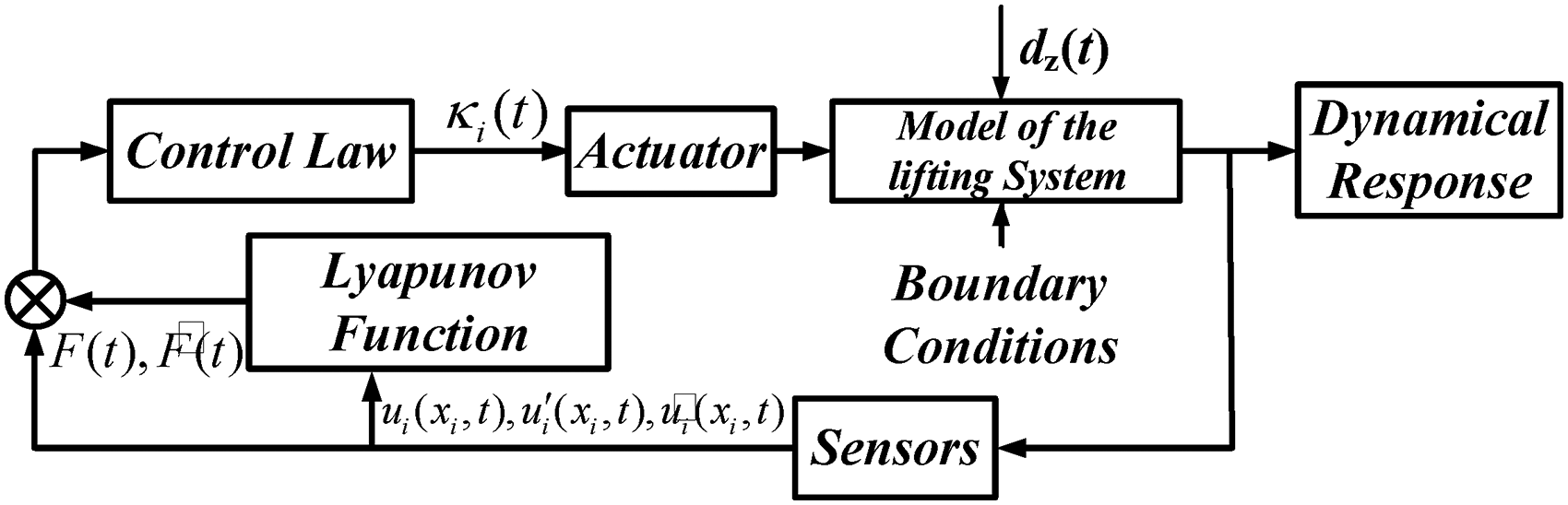
The process of boundary control of lifting system.
Based on the dynamic equations established in the previous section, the dynamic equations of the system are organized into the following form:




Considering the nonlinear uncertainties factors, it is represented by a nonlinear smooth function

Approximation principle of fuzzy system
The nonlinear control is a complex problem, in which the nonlinear terms must be approximated by compensation fitting. Fuzzy system can be used as a universal approximator to approximate any nonlinear function with any precision. The selection of product inference engine, single-valued fuzzy, central average defuzzifier, and Gauss membership function as universal approximator is satisfying requirements. In Figure 4, the diagram of fuzzy system composition and deduction procedure is as follows:

The diagram of fuzzy system composition and deduction procedure.
Here, fuzzy system is the mapping from input vector





Let the auxiliary convergence variable
It is necessary to design the auxiliary convergence variables





Fuzzy adaptive back-stepping controller design
Considering the nonlinear and uncertainty disturbance acting on the system, the control system is designed by the back-stepping control method. Define


1. Design a virtual control law for the first-order subsystem:

2. Define the virtual control law

For the first-order subsystem, in order to reach the system converge, the Lyapunov function




Here,


Stability analysis
Based on previous analysis, the Lyapunov function of the lifting system is considered as Equation (37). Take Equation (40) into Equation (39), and based on Law 4,













Simulations
Based on the control model established in the previous section, the dynamic response results of the lifting system can be obtained through numerical solution algorithm. The operating parameters are shown in Table 1.
Parameters of the lifting system.

Physical parameters of the lifting system are shown below. Here, the line density of ropes is 9.6 kg/m. The mass of ascending and descending conveyance is 61t and 36t, respectively. Axial modulus of elasticity of ropes is 1.2 × 1011 pa. The diameter of the rope is 48 mm. The initial lengths of ropes at ascending and descending side are 853 and 30 m, respectively. The fundamental frequency of the disturbance is v/R, in which v represents the lifting speed and R represents drum radius. The finite difference method is used to solve the equation of controlling model. The defined control parameters include 

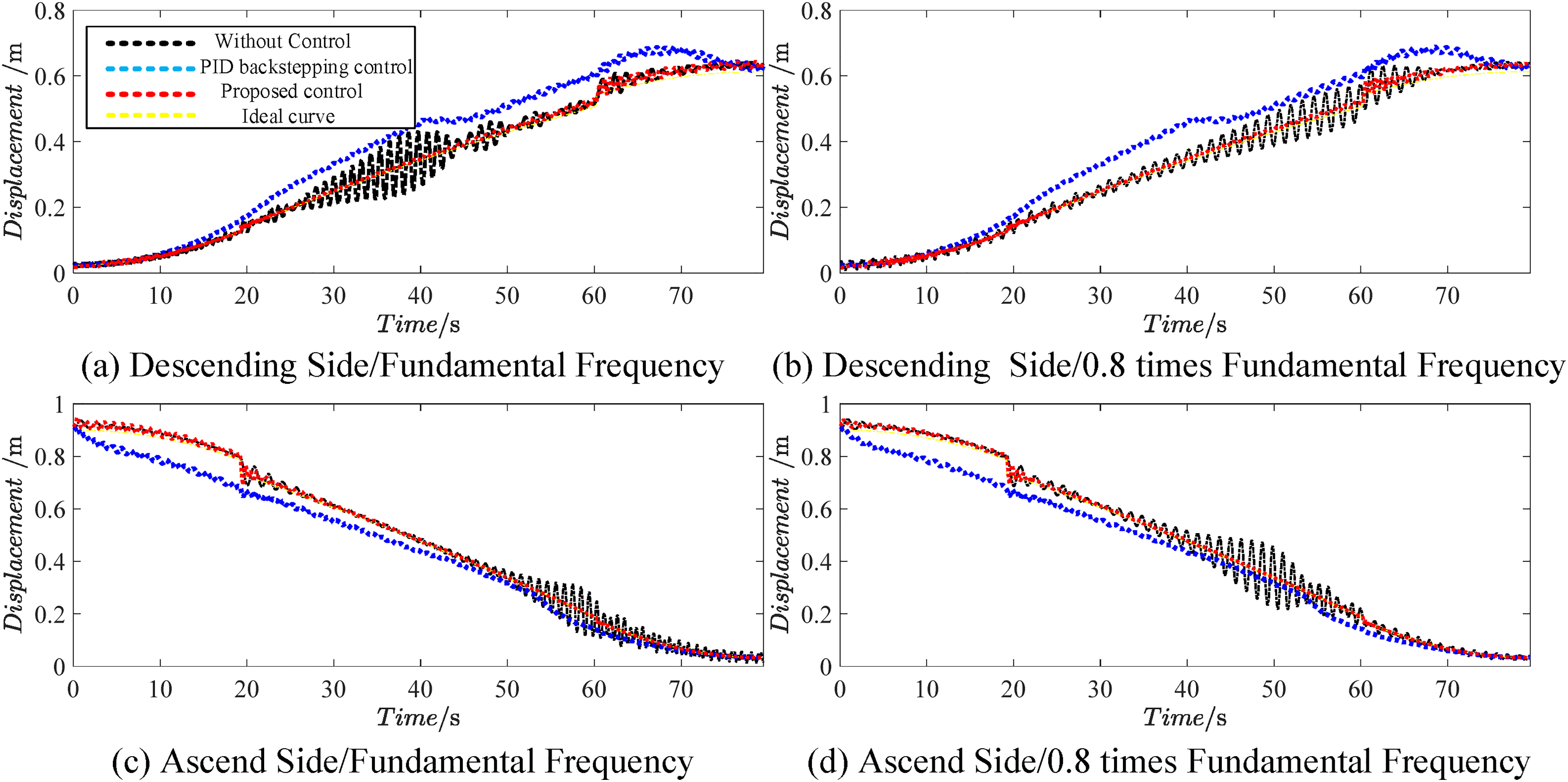
The longitudinal displacement of conveyance under fundamental frequency and 0.8 times fundamental frequency excitation: (a, b) descending side and (c, d) ascending side.
The figures above show the longitudinal displacement of the conveyance under external excitation disturbance with (red and blue line) or without (black line) the participation of controller, in which (a), (b), (c), and (d) represent the response of ascending and descending conveyance under the fundamental and 0.8 fundamental frequency excitation. By comparing the displacement tracking results of the two controllers after application and without application, it can be seen that there is a significant difference in displacement tracking between the PID back-stepping control method and the fuzzy adaptive control method proposed in this article, especially in the middle position during operation, the displacement tracking effect of the PID back-stepping controller is very poor. However, the fuzzy adaptive back-stepping controller proposed in this article can effectively track the set ideal curve with minimal error. By comparison, the vibration of the conveyances is obvious due to nonlinear disturbance without controller acting. With proposed controller and PID back-stepping controller acting on the system, the results show that the vibration amplitudes are obviously attenuated, which proves the effectiveness of the control algorithm. Compare the control curve obtained by applying two control algorithms with the ideal set curve to obtain the displacement control error, as shown in Figure 6.

The displacement error of conveyance by PID back-stepping control and proposed control: (a, c) descending side and (b, d) ascending side.
From the displacement error results, it can be seen that the fuzzy adaptive back-stepping controller proposed in this article has significant advantages in displacement tracking compared to the PID back-stepping controller. The controller proposed in this article can effectively control displacement error within a very small range throughout the entire operation process, while the PID back-stepping controller cannot, especially in the middle stage of operation.
After applying different control algorithms, the vibration velocity and acceleration of conveyance under different excitation can be obtained as the following figures. The results are shown in Figures 7 and 8.

The vibration velocity of conveyance under fundamental and 0.8 times fundamental frequency excitation: (a, b) descending side and (c, d) ascending side.

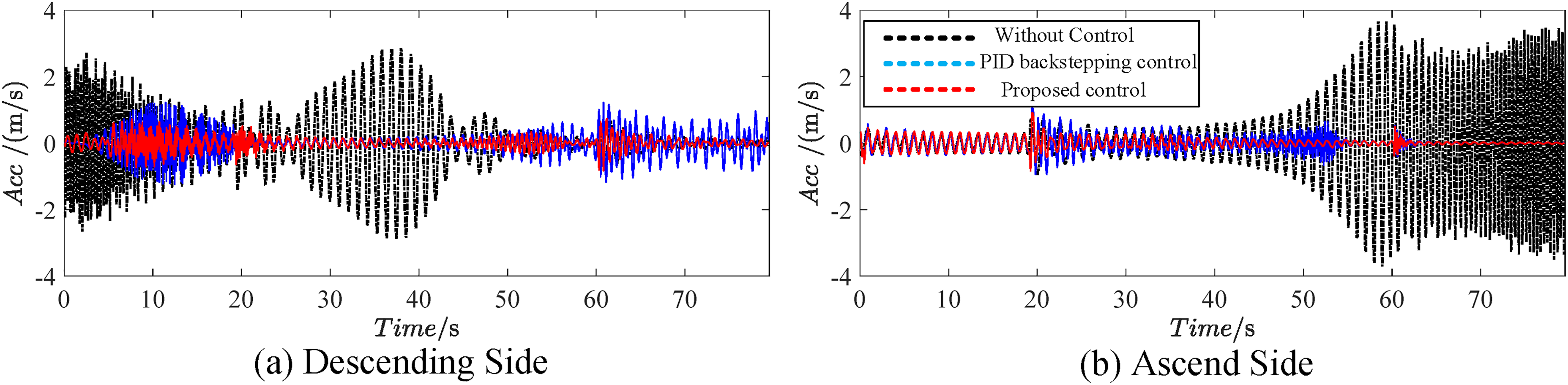
The vibration acceleration of conveyance under fundamental and 0.8 times fundamental frequency excitation: (a, b) descending side and (c, d) ascending side.
Considering two kinds of excitation disturbance characteristics and by contrast, both the proposed controller and PID back-stepping controller can effectively suppress the vibration of velocity and acceleration caused by the disturbance at both fundamental and 0.8 times frequencies. Especially in the resonance interval, where the excitation frequency crosses the natural frequency, the resonance can be completely eliminated by the implementation of the adaptive fuzzy back-stepping controller and PID controller. The two controllers can effectively suppress system vibration at both fundamental and 0.8 times frequencies. However, as can be seen from the above figure, the vibration control effect of the PID back-stepping controller is not as good as that of the fuzzy adaptive back-stepping controller proposed in this article.
To further analyze the differences between the two controllers, fast Fourier transformation (FFT) is applied to analyze the amplitude and frequency response characteristics of the vibration acceleration under control and uncontrolled conditions. Furthermore, the signal autocorrelation function transformation is carried out to obtain the power spectral density transformation of the system. Please see Figure 9. Here, the red and black lines represent the power spectral density of the corresponding frequency of the vibration acceleration with and without control.

The power spectral density diagram of the acceleration of conveyance under fundamental and 0.8 times fundamental frequency excitation: (a, b) descending side and (c, d) ascending side.
In Figure 9, x-axial corresponds to the frequency point within the frequency range, and y-axial represents the power spectral density under the frequency value. The amplitude of the power spectral density represents vibration energy from the time domain corresponding to the frequency domain.
Compared with the power spectral density diagram, it can be seen that the application of fuzzy adaptive back-stepping and PID control algorithm can reduce the power spectral density of the vibration acceleration at the conveyance largely, which is greatly reduced and basically tends to 0, which can achieve the stabilization of the system. However, after amplifying the FFT results of the proposed controller and PID controller, it can be seen that the vibration control effect of the controller proposed in this article is better than that of PID control under fundamental frequency disturbances and 0.8 times fundamental frequency disturbances.
After normalizing the vibration displacement and velocity to −1 to 1, the phase diagram of the vibration response of the system with and without control can be obtained. The phase diagrams and sum of squared acceleration amplitudes of conveyances under 0.8 times and fundamental frequency excitation are shown in Figures 10 and 11.

The phase diagram and sum of squared acceleration amplitudes of conveyance under 0.8 times fundamental frequency excitation.

The phase diagram and sum of squared acceleration amplitudes of conveyance under fundamental frequency excitation.
From the phase diagram, it can be seen that with the introduction of fuzzy adaptive controllers, the final response phase diagram is gradually concentrated at the origin position, and the vibration energy is significantly reduced, gradually tending to an absolute stable state. This can also be well verified through the graph of the sum of root mean square amplitudes. By zooming in on the phase diagram of the PID and the controller proposed in this article, it can be seen that the phase diagram of the vibration response controlled by the controller proposed in this article is more concentrated at the origin than the PID controller, indicating that the controller proposed in this article has higher stability and better control effect in vibration control.
In order to verify the adaptability and robustness of the proposed control algorithm, the superposition of fundamental and multiple frequency excitation are considered to act on the lifting system. The expression of the external excitation at the boundary is
Comparison of acceleration response with PID back-stepping and proposal control or without control under mixed frequency excitation.
As shown in Figures 12–14, under the mixed excitation of the superposition of fundamental and multiple frequency excitation, the proposed controller also has a good control effect in tracking displacement trajectory and vibration control, which has excellent performance in tracking accuracy and control stability. However, in comparison, the displacement trajectory tracking of the PID controller is still very poor, and its vibration control effect is far better than the previous control effect where the disturbance is a single frequency component. It is proven that the proposed fuzzy adaptive back-stepping controller has good adaptability and high robustness than PID controller.

Comparison of displacement response with PID back-stepping and proposal control or without control under mixed frequency excitation.

Comparison of vibration velocity response with PID back-stepping and proposal control or without control under mixed frequency excitation.
After normalizing, the phase diagrams and sum of squared acceleration amplitudes of conveyances under mixed frequency excitation are shown in Figure 15.

The phase diagram and sum of squared acceleration amplitudes of conveyance under mixed frequency excitation.
From the results of the phase diagram and the sum of squared amplitudes, it can be seen that the robustness and adaptability of the fuzzy adaptive control method proposed in this article are much higher than those of the PID control method.
Comparing the control effectiveness of the fuzzy adaptive control method proposed in this article with the PID back-stepping control method, using attenuation rate of the sum of the vibration response amplitude's squares under fundamental and mixed frequency conditions as evaluation indicators, the amplitude attenuations of different control methods are examined. The results obtained are shown in Table 2.
Attenuation rate of the sum of the vibration response amplitude's squares by PID back-stepping control and fuzzy adaptive back-stepping control method.
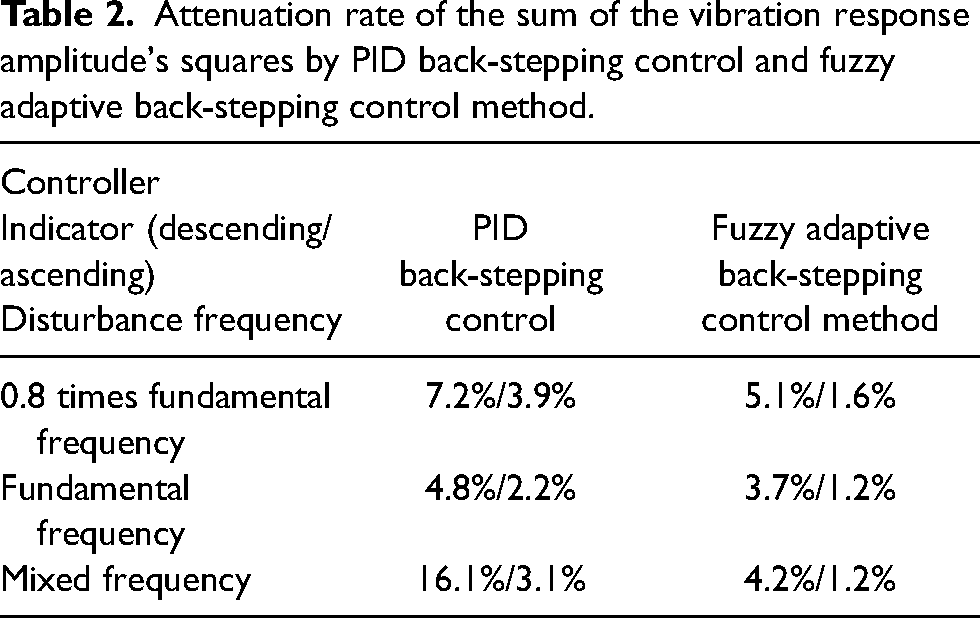
From the table above, it can be seen that the vibration control attenuation rate of the PID back-stepping controller is even as high as 16.1% during mixed frequency disturbance control. However, the vibration control attenuation rate of the fuzzy back-stepping adaptive controller proposed in this article remains basically stable, basically maintained at 5% or even 1% or below. Under the same parameters, the vibration control attenuation rate achieved by the controller proposed in this article is not only much smaller than that of the PID back-stepping controller, Moreover, the controller maintains good robustness characteristics in response to interference from different disturbance sources, and its robustness is much higher than PID back-stepping controller.
To further analyze the result, FFT is applied to analysis the amplitude and frequency response characteristics of the vibration acceleration under two controllers, as seen in Figure 16.

The power spectral density diagram of the acceleration of conveyance under mixed frequency excitation: (a, b) descending side and (c, d) ascending side.
From the suppression of the corresponding frequency and amplitude in the FFT results in the above figure, it can be seen that under the influence of mixing disturbance, the main advantage of the controller proposed in this article is not only the vibration control of the fundamental frequency disturbance in mixing, but more importantly, compared to the PID controller, the control effect of the controller proposed in this article is more prominent in the vibration control of the second harmonic disturbance, which cannot be achieved by the PID back-stepping controller. This is also the advantage of the fuzzy back-stepping controller proposed in this article.
Figure 17 shows the phase diagram of the lifting system, in which figure (a) represents the ascending side, figure (b) represents the descending side. X-axis represents time, Y-axis represents the modal displacement amplitude, and Z-axis represents the modal velocity amplitude. Here, red line represents the phase diagram under the controller applied, and blue line represents the phase diagram before the controller applied (without control).
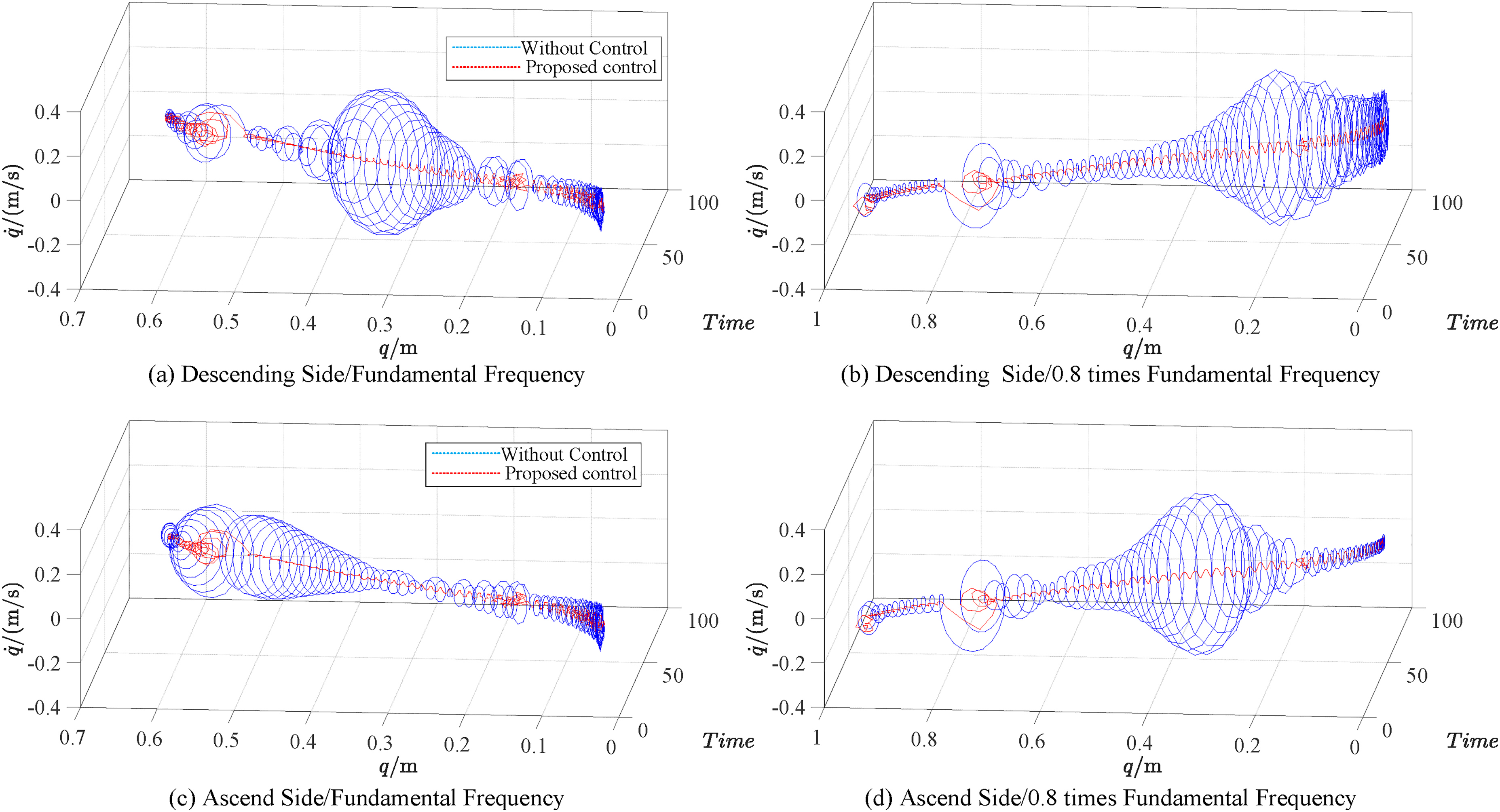
Phase of the acceleration of conveyance under fundamental and 0.8 times fundamental frequency excitation: (a, b) descending side and (c, d) ascending side.
By comparison, it can be seen that the red line is completely enveloped by the blue curve, and compared with the blue line, the fluctuation of the red line decreases significantly and close to the three-dimensional center line, indicating that the convergence speed of the phase diagram is significantly accelerated and the stability of the lifting system is significantly enhanced by applying the proposed control algorithm.
By extracting the control force and the control drive displacement at the top boundary, the control input is obtained. Please see Figure 18. The blue and red line represents the control force output on the ascending and descending side.

Control output force curve: (a) fundamental frequency excitation disturbance and (b) 0.8 times fundamental frequency excitation disturbance.
Compared with the above curves in Figure 18, the control force will occur a step mutation phenomenon due to the influence of acceleration and deceleration. The adjustment amplitude of the output driving displacement of the ascending side is larger than that of descending side hydraulic cylinder, and the adjustment range of the control driving displacement is proportional to the length of rope.
Conclusion
In this article, considering the nonlinear boundary disturbance and the uncertainty factors, a fuzzy adaptive back-stepping controller is designed to control the longitudinal vibration of the conveyance in lifting system with distributed mass time-varying length using fuzzy approximation and disturbance observer. The simulation results show that under different disturbance, the proposed controller can eliminate the disturbance nonstationary vibration caused by nonlinear disturbance and system parameter uncertain and effectively eliminate the system vibration. By comparing the fuzzy adaptive back-stepping controller proposed in this article with the PID back-stepping controller, it is evident that the fuzzy adaptive back-stepping controller proposed in this article has obvious advantages in trajectory tracking and vibration control. From results, it can be seen that the vibration control attenuation rate of the fuzzy back-stepping adaptive controller proposed in this article remains basically stable, basically maintained at 5% or even 1% or below. Compared with previous works, the main contributions of the article can be stated as follows:
A vibration control model for a distributed mass flexible lifting system under multiple complex excitations was established, simplifying the nonmatching control model of a nonlinear multi-input multi-output system. The longitudinal vibration of the lifting rope was transformed into an internal state, achieving the effect of controlling the pose of the end effector and the tension of the lifting rope through boundary control. A back-stepping adaptive control algorithm was constructed for its control indicators, improving the effectiveness of vibration control. Based on the boundary control method, through boundary energy input, the characteristics of fuzzy systems that can approximate any nonlinear continuous function are utilized, combined with nonlinear disturbance observers, the nonlinear terms of the system can be compensated, which is well adapted to the disturbance observation requirements under different excitation effects, providing support and basis for vibration control of systems under multi-dimensional disturbances.
Based on the research of this article, the vibration of the time-varying lifting system can be fast suppressed and eliminated by the control method proposed in this article, which increases system stability and reliability and promotes the development of flexible body boundary vibration control theory. In this article, the control parameters are still selected by trial, and the search for optimal control parameters by multi-objective optimization method will be considered in the future.
Footnotes
Variable annotation table
Acknowledgments
This work is supported by the National Natural Science Foundation of China (52375137).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (52375137).
Appendix 1
The definition in the proof of control law convergence: