
Abstract
One of the basic characteristics of the walking robots is the maintenance of their dynamic balance during the walk, and the stability of legged robots in locomotion is necessary. In the past few years, the dynamics of legged robots was studied based on very simple or simplified leg structures. A more complete dynamic model is essential for the further research of a practical legged robot. As an important enrichment in stability study for a walking robot, a stability measure named as moment ratio stability margin is introduced, which takes all stability factors into formulation. The mechanical structure of a novel parallel–serial legged mechanism is introduced. Based on this structure, the performance of the proposed method is demonstrated. The advantages and practical significance of the proposed technique are illustrated by comparing it with conventional methods. The experimental study is carried out to evaluate and characterize the performances of this method.
Introduction
With the development of modern industry and robotics technology, the need for legged robots instead of human being has increased to overcome some execrable environments because they can use discrete footholds for each step. Multi-legged robots are suitable to be used in unstructured roads, it can replace people to work in some kinds of complex conditions, such as underground mine, nuclear power station, and other dangerous areas. Interests in research and good dynamic locomotion performance of the legged robots have been increasing in recent years. 1 –3
The quadruped robots are the best choice among all legged robots related to mobility and stability of locomotion. BigDog can walk up and down on a slope, trot at a fast pace, carry a heavy payload, walk through forest and snow, and make decisions about whether to go left or right around a tree like animals. 4,5 LS3 and WildCat have high-speed mobility and locomotion stability in the world now. 6,7 The robot HyQ was designed for navigating over rough terrain and complicated movements. 8 In addition, the researchers have done a lot of work in this area to improve the performance. A large number of quadruped robots, such as TITAN series, 9 Tekken, 10 SCalf, 2 and HuboDog, 11 have been developed in the past. All achievements of the aforementioned works that contributed to the advancement of walking robots are deeply appreciated. However, most of them are still confined to the laboratory prototypes. There are still several problems that need to be further investigated. Therefore, the development of the quadruped robots has not produced in the real significant applications.
One of the major problems is the stability during walking movement. Because of the unstable environment or action of external force, the body will be unable to maintain balance, which would lead the robot to tumble around the line connecting two supporting legs, thus the robot will flip or fall. It is difficult for the robot to reinstate moving forward in complex terrain environment. The ability to overcome tumbling, called “stability,” is discussed in this article. Robot stability must be estimated accurately for the aim of evaluating the reliability and must be carefully controlled in time of gait generation. A reliable evaluation of motion planning depends on the accuracy of stability estimates. 12,13 For these reasons, the adoption of stability measures and methods to calculate these measures is needed.
In the past few decades, theoretical investigation on stability of the legged robots has produced many results. The static stability margin (SSM) was proposed by McGhee and Frank. 14 They defined a support polygon in which the projection of the center of the gravity is within, the robots is stability. The SSM is one of the early methods for stability estimate, it introduced the boundary of the support polygon which is foundations of stability-driven way to legged locomotion, and fueled fellow researchers in this subject. 15 The energy stability margin (ESM) is an effective static stability measurement, which uses impact energy to evaluate the safety and stability of the robot. 16,17 Soon afterward, Hirose et al. proposed normalized energy stability margin based on ESM. 18 A different stability criterion, the force–angle stability margin (FASM), was introduced by Papadopoulos and Rey. 19,20 This method can accurately judge stability on flat terrain. 21 And in the literature of biped robots, the zero moment point (ZMP) is commonly used. 22,23
Previous work on stability of the legged robots was mainly on the topics of bipeds, quadrupeds, hexapods, and some running myriapods. However, when a legged robot is walking at a rapid pace along the road, exploiting its inertial force technique appears more significant. The balance of its inertial force is the problem often occurring in the legged robot’s applications. Therefore, a more comprehensive dynamic model of a legged robot, which contains the inertia of all major components, should be derived for the intensive study of a legged robot performing at a reasonably rapid pace.
In this article, we attempt to explore a dynamic stability margin for a quadruped robot to predict and evaluate the instability problem during its walking movement.
The structure of this article is as follows: The prototype of the robot is introduced in the second section. Leg parameters investigated, including mechanism, kinematic, and dynamic, are addressed in the third section. Then, the tumbling motion is analyzed and the torque ratio stability margin is proposed in the fourth section. Simulations and experiment are presented in the fifth section. Finally, the conclusions are drawn in the sixth section.
Prototype of the robot
This section presents two animal-type quadruped robot prototypes named Baby Elephant (BE-1 and BE-2). The main parameters of the Baby Elephant (BE) are shown in Table 1. The first robot was actuated by a new hydraulic system, and another was actuated directly by electronic motors as shown in Figure 1. For the first robot, it can carry 60 kg payload at least as shown in Figure 2(a) and can walk through a gravel path (Figure 2(b)) and slopes (Figure 2(c)) with a very good mobile stability. They are designed to meet the needs of complex work in unstructured environment, such as storage tanks for petroleum industries and nuclear power plants. 24,25
Parameters of BE.
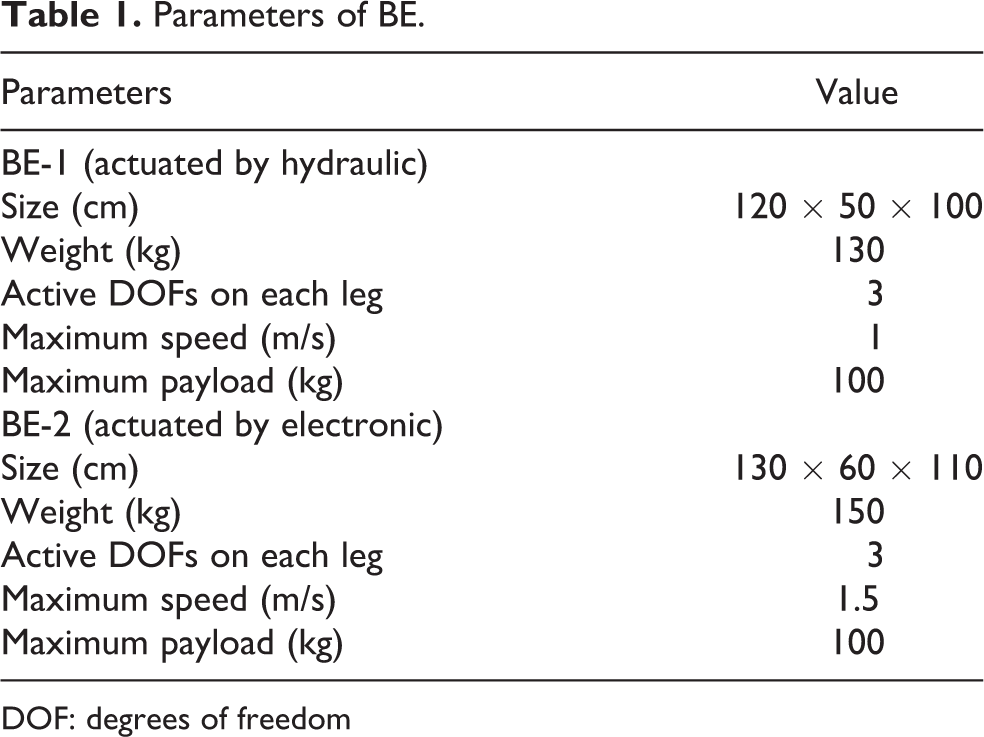
DOF: degrees of freedom
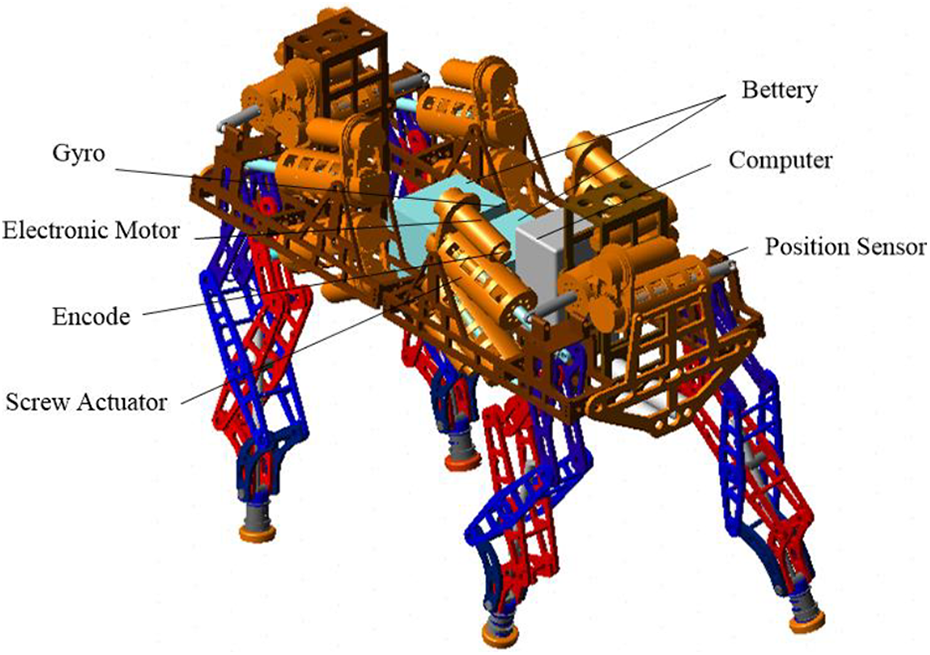
Baby Elephant quadruped robot.

The performance of the BE robot. BE: Baby Elephant, a: prototype of the robot; b: traversing stony paths; c: climbing a slope.
Model of the leg
Structure of the leg
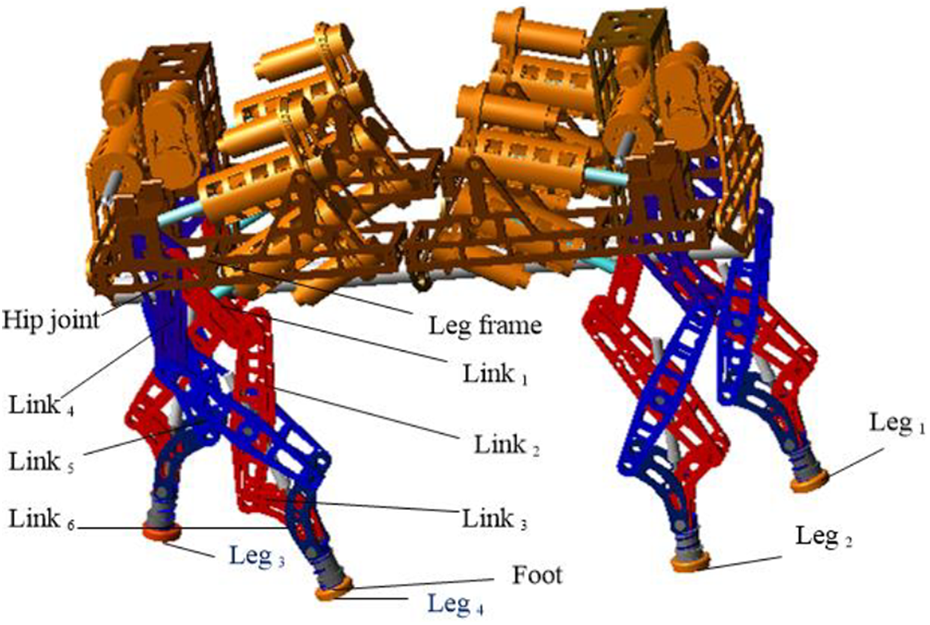
Legged robots distinguish features from other moving machines by the fact that they use legs for moving, making a hard study of the leg design worthwhile. This section presents a hybrid mechanism of the Baby Elephant quadruped robot legs. It is a kind of parallel construction in the sagittal plane, as shown in Figure 3, which have two degrees of freedom (DOF) are used to lift the legs by means of two motors; in the side of the legs, there have one DOF (Figure 4), it is necessary for locomotion and controlled by one linkage with the other motion pairs connecting to the hip. With this structure, Baby Elephant quadruped robot differs from other quadruped robot in three main aspects: (1) No actuators and electronic on the lower leg space, so that it is convenient to protect the electronic sensors when the robot walks through some severe environments. (2) No cable provide energy, a mobile power supply is mounted on the robot providing all the power. (3) It has very simple forward and inverse kinematics and easy control and has a sufficient workspace as shown in Figure 5, and the stiffness of the leg is large with this type of mechanism.

Mechanical structure of the leg in the sagittal plane.
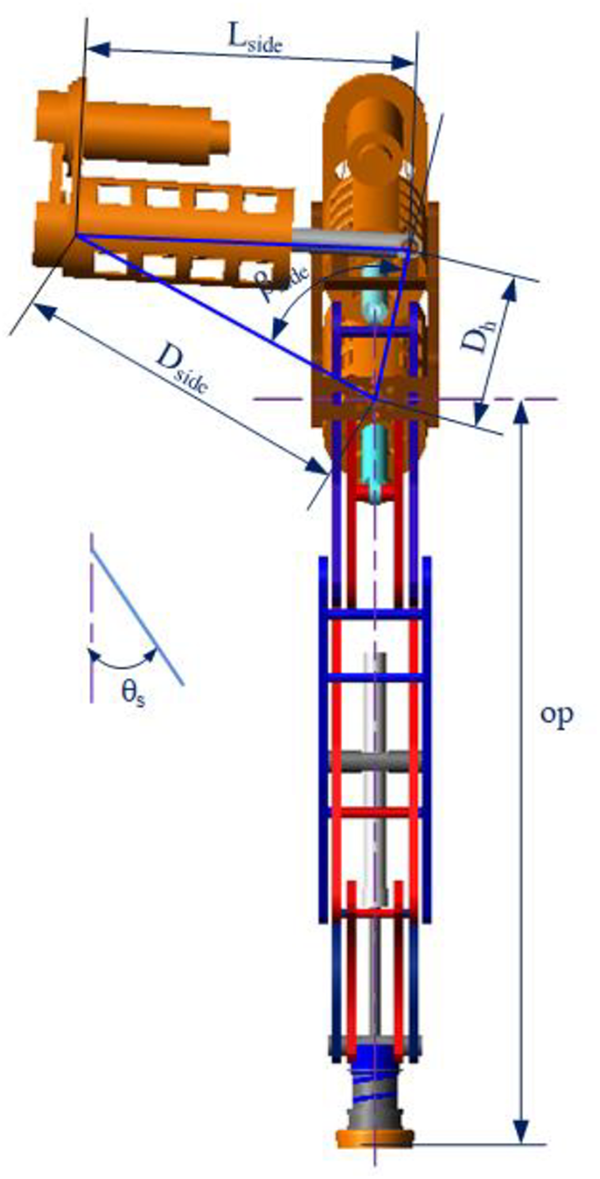
Mechanical structure in the side of the leg.

Workspace of the end of single leg.
Kinematic and dynamic of BE-2
In this section, to analyze the stability of the robot, let us first introduce the kinematics and dynamic of a single leg as well as BE-2 (Figure 6).
Three-dimensional prototype of the BE-2. BE: Baby Elephant.
As previously mentioned, BE-2 was designed with 3-DOF in each leg. Based on this design requirement of mechanical structure of the leg, each linkage has been assembled with certain angle. As shown in Figure 7, each rotational joint angle based on the hip joint point known as hip coordinate system (HCS), and the body coordinate system (BCS) is located in the geometric center of the body. Since the mechanical configurations of the legs are extremely identical, the coordinate system and transformation matrices of four legs are the same too. Thus, the calculations of kinematics based on BCS can be derived from HCS for one leg according to D-H rules.

The coordinate system of BE-2. BE: Baby Elephant.
The ranges and locations of the main joint angles are shown in Table 2. The rotational joint angle of the link is defined based on BCS, where


where i = 1,…, 4, j = 0,…, 2, and c = cos, s = sin. According to the geometric character design of the leg,
iθ
12 =
iθ
23 = 2θ. Similarly, the kinematic of another limb-2 also can be defined,
Physical rotational joint angle parameters of the leg.

The inverse kinematics of each joint can be written as follows



where





Based on the BE-2 leg mechanical structure shown in Figure 3, if given the length of three cylinders L u, L d, and L s, the forward kinematic equation can be derived from the angle of each joint to the foot position.
Differentiating θij
with respect to time, we can get the knowledge of angular velocity vector


The linear velocity vector of jth linkage and linear acceleration vector are obtained as follows


Then the linear velocity vector of centroid of jth linkage and linear acceleration vector are obtained as follows


where
i
, j+1
Stability evaluation
Tumbling motion analysis
The moment ratio stability margin (MRSM) describes the system’s stability considering resultant torque and dynamic effects. 26 To measure the stability, let us first discuss tumbling motion of a legged robot. In this research, we only consider the simplest case of a three-leg-supported robot. In a robot such as BE-2, which can move a swinging leg quickly enough within the short cyclic period of walking, a swinging leg can land on the ground immediately. Therefore, stability analysis of the robot is conducted in order to evaluate the effect of swinging leg’s dynamic parameter on robot.

Mechanism configuration and support polygon of BE-2. BE: Baby Elephant.

Dynamic parameters of the linkage.
In Figure 8, a three-dimensional mechanism robot system with the support polygon is constructed by the projected points of legs. Let

The vector from

its unit vector is denoted by

Therefore, the torque

where rmcj
is the location vector of centroid of jth linkage,

As we can see from equations (14) and (15), when the robot is walking with a constant gait, the linkage under the inertial force, torque, and gravity, these effects exert on the connecting of linkages and have three torque components to the hth overturn axis, which can be expressed by

where



According to equations (15) and (16), all the dynamic parameters of the jth linkage are taken to the above formulas, and the torques are obtained, if the torque component

the resultant destabilizing torque to hth overturn axis is expressed as

and the resultant torque to hth overturn axis generated by ith leg is expressed as

At a given instant, if the resultant torque
Thus, the MRSM index kdh is introduced about one overturn axis as follows

Besides, the resultant torque acted on hth overturn axis, an impact of external force, will also lead the robot to tumble. Suppose that external impact is an imaginary force

where
The direction of

As we can see from equation (24),
Initial numerical simulation
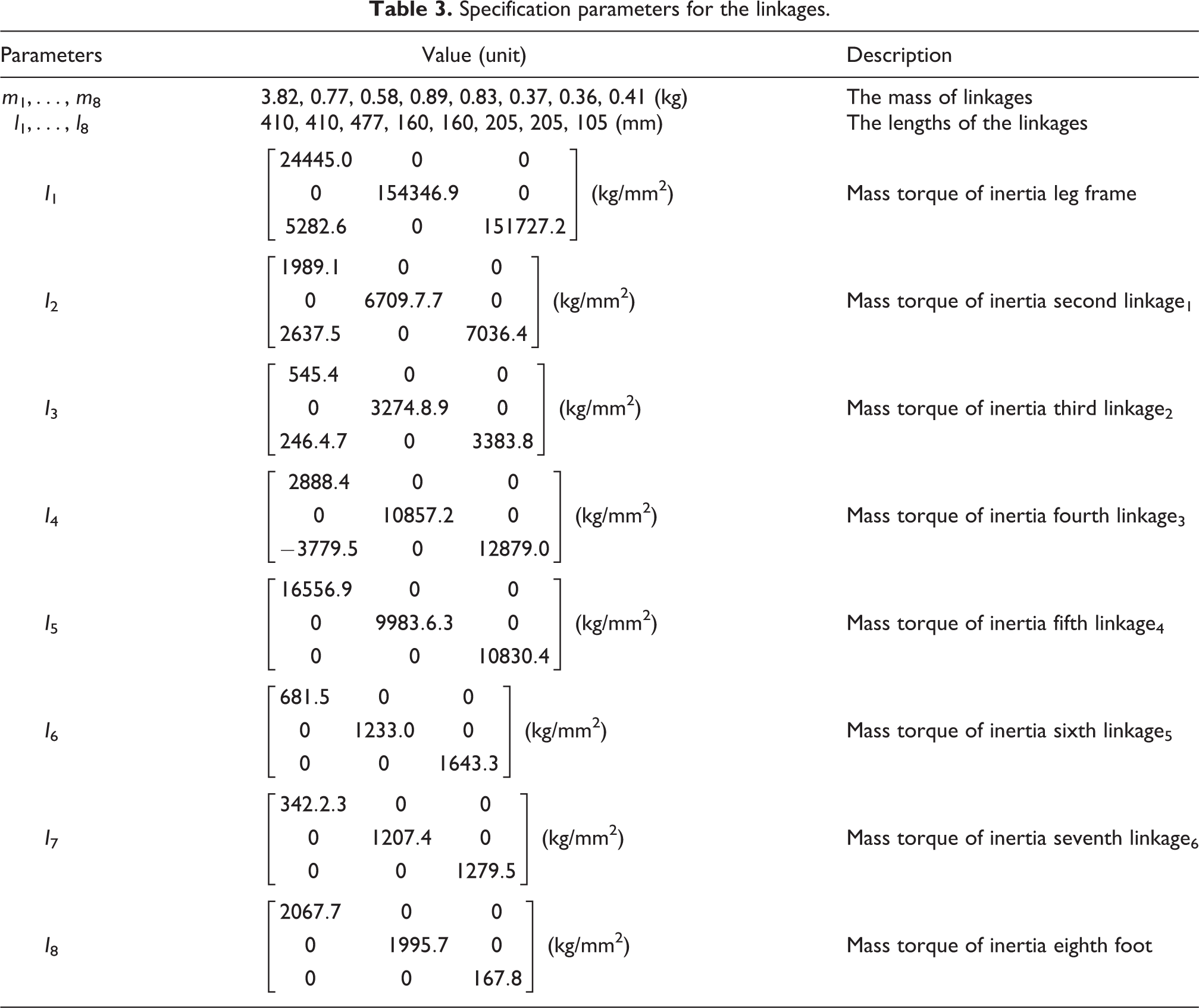
When walking on rough terrains, the robot uses crawling gait. The results show that using crawling gait can enlarge the stability margin of the robot. In this article, the duty factor β is 0.75, the step length is 100 mm, step height is 50 mm, the body height is 720 mm and the period is 1s. There are three supporting legs forming the supporting polygon. According to the previous assumption and equations (24) and (26), input parameters of ith leg are listed in Table 3. Calculating the resultant torque with respect to the boundaries of its support polygon, the result can be seen in Figure 10.
Specification parameters for the linkages.

Resultant torque about three overturn axis.
Simulation and experiment
Tumbling simulation
In this section, the presented measure of stability formulated is exemplified with simulation model. The BE-2 walks in a horizontal surface with a crawling gait, it is a common form of movement for a quadruped robot, and there is no payloads carrying. The three-dimensional simulation model was constructed in RecurDyn environment, and the key parameters of the simulation model are listed in Table 3.
Firstly, the robot is moving with a constant crawling gait, as shown in Figure 11(a) and (b). The robot is moving without body sway, which means the robot is still under stable state. The resultant torque acting on the three overturn axes can be seen in Figure 12, the stability margin is shown in Figure 13. The periodicity magnitude of resultant and index of MRSM switches from positive to negative about critical point, respectively. From Figure 12, the resultant torques

Walking under stability gait and the tumbling state of BE-2. BE: Baby Elephant.

Resultant torque curves about support polygon under constant crawling gait.

Stability curves about three overturn axis under constant crawling gait.
Continually, when the cycle period t is 14.75s, the stable state cannot be maintained, which would lead the robot to tumble around overturn axis b
3. There was no external force
When the robot is walking, the body is subject to inertial force which could be caused by a swinging leg, and the MRSM is appropriate for measuring robot stability. In Figure 15, it is seen that the results of three measures including FASM, zero moment point (ZMP) and torque-height stability margin (MHSM) are insensitive to tumbling in destabilizing state. And the MRSM is too precautious compared to other measures. Note that as it has been pointed out in previous sections, 17,27,28 the FASM cannot be judged precisely, when dynamic effects arise during walking; the ZMP method is not valid for an uneven terrain; the MHSM is independent of cog height and considers neither kinematic nor dynamic parameters.

Resultant torque and stability curves about overturn axis happen in tumbling state.

Comparison between important stability curves in tumbling state.
Experiment
To validate the effectiveness of the proposed derivation process of MRSM, we practiced a simple tumbling experiment, the same locomotion with crawling gait as was carried out during the simulation was applied to the physical model of the quadruped robot. The 175-kg robot with the payload (25 kg) can stand on the gravel road, with two legs take turns stepping along the road. The step size is 710 mm. The step height is 48 mm. The cycle time is 4s and the duty factor is 0.75. All the sample points can be obtained for a longer period. During the locomotion, each leg tip travels same distance while in motion during one cycle and robot has straight line motion. The sensor data were measured and the FASM, SSM, and ZMP were calculated and compared. Figure 16 shows the actual robot during different phases of the experiment, and Figure 17 overlays the experimental and simulated results.

Whole experimental system.

Simulated and experimental stability results in tumbling state.
An experimental study was conducted to examine the resultant torque that defined a possible energy required to tumble the body. As reliable evaluation of motion planning depends on the accuracy of MRSM, when the robot is flip about one overturn axis, the stability margin is predicted during gait generation.
In the process of experiment, the initial state of the swinging leg was used as the basis for sensitivity. Hence, when the cycle period t is 0s, the results of four measures including FASM, SSM, ZMP, and MRSM are 1. During the first phase of the motion, the cycle period t is 0–5s, the MRSM decreases due to the lifted legs of the robot. Meanwhile, the FASM, SSM, and ZMP show no change in the stability while MRSM shows a decrease in the stability. This shows that MRSM is sensitive to the swinging leg of the robot.
During the second phase, the cycle period t is 5–15s, the MRSM shows a rapid decrease in the stability of the robot which is due to an external force
During the third phase of locomotion, the cycle period t is 15–25s, as shown in Figure 17, all the margins including FASM and MRSM indicate that the robot is losing the stability in this phase dramatically, the stable state cannot be maintained, the index of the margins switch from positive to zero about critical point, the robot is tumbling finally.
In general, the experimental results closely follow the simulation results with a few fluctuations due to experimental errors. Both the simulation and experimental results predict the instability occurrence accurately. From Figure 14, the MRSM is more accurate than the ZMP, SSM, and FASM when the robot is subject to inertial force. However, they all follow similar behaviors when encountering different situations and they all go to instability at the same time.
Conclusions
This article introduced the MRSM based on a hybrid mechanism legged quadruped robot BE-2. The proposed new dynamic stability margin is a practical and effective method adopted in evaluating the stability problem of the quadruped robot during its motion. This approach is effective on static factors such as support polygon consisting of three footholds and can analyze the dynamic influence factors when the robot is subject to inertial actions between stabilizing and destabilizing torque in a complex robot system.
A few case studies were introduced to compare the proposed measure with the main current measures. Simulations and experiments were completed to compare the presented stability margins with the FASM, SSM, and the Zero Moment Point (ZMP), and the obtained results show the advantages of the MRSM measure which can be used for online planning due to limited computational requirements.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was partially supported by the National Basic Research Program of China (Grant No.).