
Abstract
Nowadays, condition-based maintenance (CBM) and fault diagnosis (FD) of rotating machinery (RM) has a vital role in the modern industrial world. However, the remaining useful life (RUL) of machinery is crucial for continuous monitoring and timely maintenance. Moreover, reduced maintenance costs, enhanced safety, efficiency, reliability, and availability are the main important industrial issues to maintain valuable and high-cost machinery. Undoubtedly, induction motor (IM) is considered to be a pivotal component in industrial machines. Recently, acoustic emission (AE) becomes a very accurate and efficient method for fault, leaks and fatigue detection and monitoring techniques. Moreover, CM and FD based on the AE of IM have been growing over recent years. The proposed research study aims to review condition monitoring (CM) and fault diagnosis (FD) studies based on sound and AE for four types of faults: bearings, rotor, stator, and compound. The study also points out the advantages and limitations of using sound and AE analysis in CM and FD. Existing public datasets for AE based analysis for CM and FD of IM are also mentioned. Finally, challenges facing AE based CM and FD for RM, especially for IM, and possible future works are addressed in this study.
Keywords
Introduction
Nowadays, condition monitoring (CM) along with early and continuous fault diagnosis (FD)1–11 is vital in the modern life of industries.12–17 The importance of CM and FD engineering processes comes from the serious need for continuous monitoring of the health of the industrial components and systems through their life.18–23 Moreover, the main goals are to improve the reliability,24–26 safety,27–29 availability,30,31 efficiency,32,33 and to reduce the maintenance costs34,35 as well as to avoid a breakdown or sudden failures.36,37 In modern industrial applications,38,39 rotating machinery (RM)40–42 becomes the most important equipment. RM has been widely used in many vital industrial areas,43,44 which include blowers, expanders, engines, pumps, turbines, motors, and generators.45–47
Induction motor (IM) is considered to be one of the main components in industries. However, the importance of extensively using IM comes from some features of it. IM is basic, cheap with high availability and reliability. 48 IM consists of three main parts: bearing, stator, and rotor. Figure 1 shows the main parts of IM and the percentage of their faults.49,50
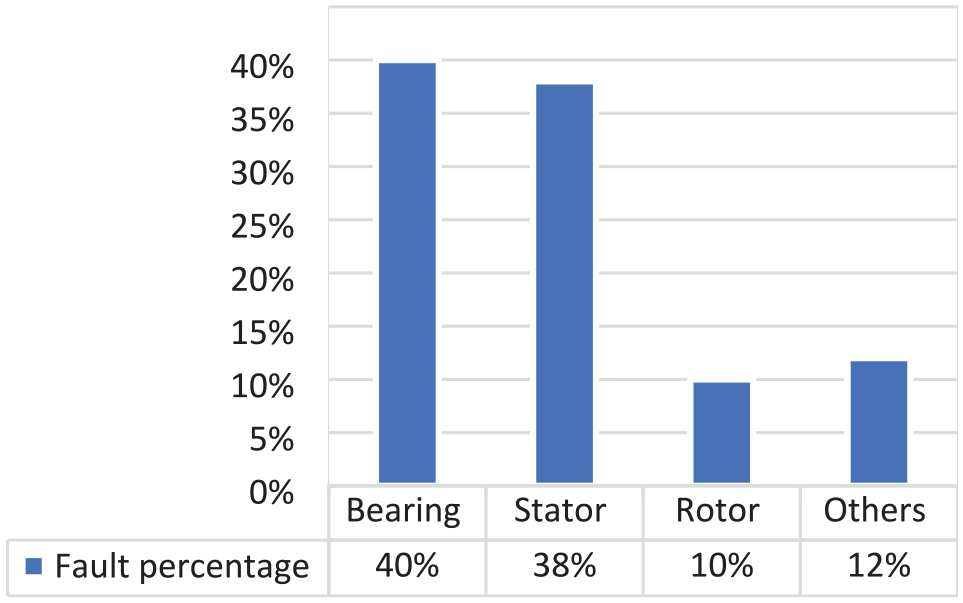
IM main parts and the percentage of their faults.
On the other hand, CM and FD of IM is widely used to maintain the normal operating condition of the equipment.51–54 However, the main purpose of CM and FD is to diagnose and detect faults and failures.55–59 Hazardously, the impact of any failure may arrive to a serious breakdown of the over whole system and heavy losses, which leads to expensive maintenance cost.60–62 However, to avoid that loss, variety of methodologies for CM and FD have been analyzed and developed. Moreover, several data driven based methods have been proposed such as, data fusion techniques,63–67 signal and image processing based techniques,68–72 artificial intelligent (AI) based techniques,73,74 data acquisition and mining techniques,75–80 and expert system techniques.81–83 All previous techniques have used specific analyses to develop the FD methodology to arrive to the best efficient and accurate results.84–87 Three main types of analysis are used in that studies including, electrical based analysis, oil and chemical based analysis, and finally, mechanical analysis. 88 In more details, twelve analysis based on electrical, mechanical, and chemical are found in the literature, including, vibration,89–92 noise,93,94 radio-frequency (RF),95–98 infrared,99–104 current and voltage,105,106 electromagnetic field,107–109 oil,110–113 pressure,114–118 ultrasound,119–121 temperature,122–126 and sound and acoustic emission (AE) analysis. Table 1 highlight main analysis used in CM and FD for IM. 127
Comparison between main types of CM and FD analysis for IM.

The proposed study aims to review the CM and FD based on sound and AE for IM. The study also points out the advantages and limitations of using sound and AE analysis in CM and FD. Finally, challenges and possible future works are also addressed in this study.
The rest of the paper has been organized as follows. Firstly, a general background and introduction of AE analysis is discussed in section 2. Secondly, CM and FD of IM based on AE is discussed in section 3. Thirdly, CM and FD for IM based on AE for four types of faults: bearings, rotor, stator, and compound is presented in section 4. Fourthly, existing public datasets are mentioned in section 5. Finally, challenges facing AE based CM and FD for IM, and possible future works are addressed in section 5.
General background of AE analysis
The acoustic emission (AE)128–130 is a passive powerful non-destructive evaluation (NDE) technique that monitors the transient stress waves for the materials. 131 Moreover, as a result of microstructural changes for the materials or structures, acoustic emission shows the acoustic stress waves that appear from the release of the energy. Conventionally, sensors (typically piezoelectric types) applied directly on the surface to capture these waves. 132 However, analysis of the picked stress waves can be used as a CM and FD.133–135
Nowadays, AE 136 becomes a very accurate and efficient method for fault, leaks and fatigue detection and monitoring techniques in materials137,138 and structural analysis. 139 That include, concrete,140,141 plastics,142–144 polymers,145–147 ceramics,148–150 pipelines,151–153 pressure vessels,154,155 storage tanks,156–159 bridges,160–162 aircraft,163,164 bucket trucks, 165 wood,166–168 fiberglass,169–172 composites,173–175 welding,176–178, tubes, 179 aerospace structures180–182 and finally for military applications.183–185 Figure 2 illustrates AE instrumentation chain.

AE instrumentation chain.
Introduction of CM and FD of IM based on AE
Importantly, CM and FD based on the AE of RM have been growing over recent years. AE is widely used in rotating electric motors CM and FD186–188 for both electrical and mechanical faults including, the shaft misalignment, 189 the bearing,190–192 the rotor193,194 and the stator. 195 In addition, AE is extensively used in CM and FD for the gearbox.196–199 The wind turbine CM and FD using AE are also proposed and discussed.200–203 Figure 3 shows the CM and FD process based on AE.
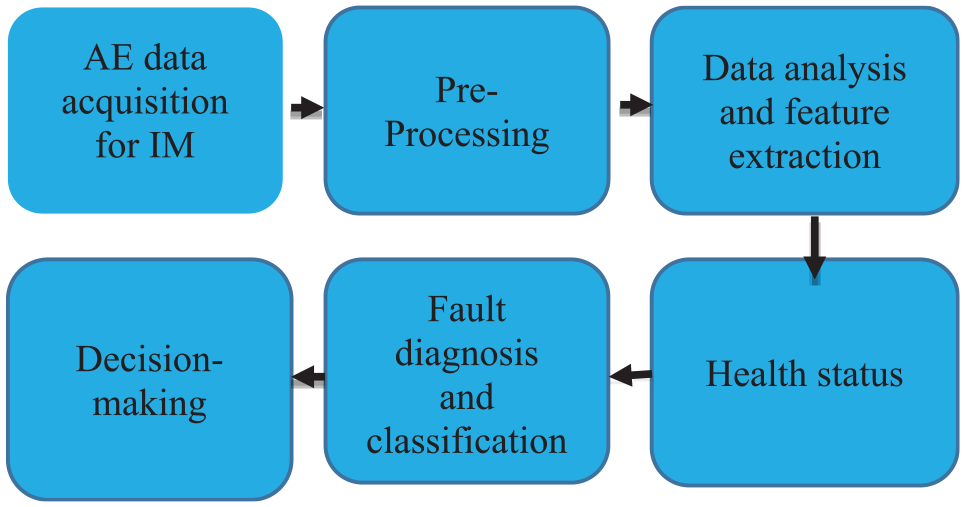
CM and FD process based on AE.
Once the AE signals are caught, several signal processing techniques are applied in the pre-processing stage and the feature extraction stage.204,205 Importantly, since AE signals are sensitive to the environmental noise, filtering, signal discrimination and noise reduction are crucial in the pre-processing stage.206–208 Feature extraction and classification stages are the most important stages in the CM.209–211 Characteristic patterns (time and frequency as well as time/frequency domains features) could be extracted from AE signals for fault recognition and classification.212–216
However, choosing acoustic feature extraction algorithms is a challenge. Thus, noise could prevent acoustic feature extraction algorithms from achieving accurate results as well as because the AE is non-stationary. In this regard, how to choose the most functional AE feature extraction and classification algorithms to achieve the most effective features is the target of all new CM and FD based on AE studies.217–220 Figure 4 shows a test rig schematic diagram for CM and FD of IM based on AE.
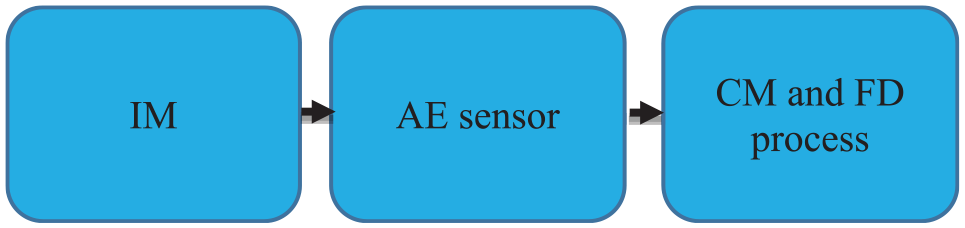
Test rig schematic diagram for CM and FD of IM based on AE.
Advantage and limitations of AE analysis in CM and FD
The advantages of AE based analysis in CM and FD for IM compared with the rest of CM and FD methods (i.e. vibration) could be summarizes as:
AE based analysis provides earlier and rapid detection for mechanical and electrical faults. 221
AE based analysis provides high sensitivity to friction and energy level. 222
AE based analysis provides accurate information about several aspects of the fault. 223
Fault localization capability. 224
AE based analysis provides dynamic processes capability. 225
Non-invasive and cheap.
The Limitations of AE based analysis in CM and FD for IM are:
CM and FD for IM based on AE
Importantly, in order to enhance the reliability and availability of the IM, there is a vital need for fault detection and diagnosis. However, Four main types are available in the litretue including, bearing, stator, rotor and compund, as shown in Figure 5.

Faults types of of IM.
Bearings
Rolling bearings are one of the most important components of IM.230–232 In Glowacz et al., 233 an early FD technique based on AE for single-phase IM is introduced. The proposed technique used a method called the selection of amplitudes of frequency – multi expanded in the feature extraction stage to create a feature vector. Gaussian mixture models (GMM), nearest neighbor (NN), and nearest mean (NM) classifiers are used in the classification stage. Non-invasive and inexpensive techniques are the main advantages of using this technique. Sensitivity to environmental noises is the main drawback of the proposed method.
In Van Hecke et al., 234 a low-speed rolling element bearing FD using an AE signal is proposed. Firstly, to sample AE signals, a heterodyne frequency reduction approach is applied. After that, the sampled AE resampled again according to shaft crossing times to account for fluctuations. Secondly, to extract features, an even number of data points (obtained from the resampled process) are used to find the single spectral average for all bearings fault types. Effective diagnosis method for extracting condition indicators is the main advantage of using this method. However, one single-fault detection that is, low shaft speeds bearing fault is the main limitation for this method.
Stief et al. 235 proposed a data fusion system to combine multiple features. An AE, vibration and electric signals are all used and measured. Moreover, a two-stage Bayesian inference approach is applied to combine information from multiple sources. The main advantages of applying this method are, the proposed approach can be operating under normal and noisy working conditions, and it is reliable and efficient for use on health assessment. The drawbacks of applying this approach are, the approach is valid only for steady-state signals and it is not able to identify the severity of faults as well as (similar to all data-driven approaches), large quantities of comparable measurement data must be available.
A bearing FD with several operating conditions using AE was proposed in Kumar et al. 236 A decision tree is used to extract statistical features. Following that, in order to classify faults, the Bayes classifier is applied. Simple, low-cost, non-invasive and the ability to word with different operating conditions are the main strength points of this approach. However, Sensitivity to the noise and one single-fault detection are the main limitations of using this method. Similarly, in He and He, 237 an approach for bearing FD using AE and deep learning (DL) is introduced. In this approach, the Fourier transform (FT) is used to preprocess the data. Then, in order to obtain a DL network (neural network NN), a simple spectrum matrix is applied. The main advantages of using this approach are, working with different operating conditions, dealing with big data, and extract features rapidly. However, single-fault detection is the main disadvantage of applying this approach.
In Martin-del-Campo and Sandin, 238 an online CM and FD approach based on unsupervised learning are introduced. The signal fidelity approach along with dictionary learning-based heuristics for faults detection is also described. Moreover, sparse approximation and time-domain are both employed for vibration and AE signals. Importantly, the results in terms of the adaptation rate, accuracy, and cost of computation are presented. However, once a fault occurs, the features change very slowly in low operation conditions in comparison with a high-speed variation. Online feature condition monitoring and working under different operational conditions are the main strength points for this approach. However, high computation cost and single-fault detection are the main disadvantages of this approach.
Kedadouche et al. 239 proposed a comparative study between empirical wavelet transforms (EWT) and ensemble empirical mode decomposition (EEMD) methods based on AE signal. Moreover, an index selection approach that is, Kurtosis is applied to automatic selection of the Intrinsic Mode Functions (IMF). The results showed that the computational time is better for EWT compared with The EEMD. Furthermore, EWT has the ability to seek the frequency and associated harmonics of the faulty bearing. However, a numerically simulated signal is used in this study.
An early FD of online monitoring for rolling element bearings is developed in Hemmati et al. 240 To extract the features, kurtosis and Shannon entropy methods are used in order to find the optimal bandpass filter and wavelet packet transform (WPT) as well as envelope detection. Furthermore, the spectrum of squared Hilbert transform is also applied to add a new layer of improvement. The main strength points of the proposed technique that it has the ability to detect the size and location of faults, operating speed capability, and loading conditions capability. However, the very high computation cost is the main disadvantage of this approach. A range of data processing and analysis methods are applied for AE data to extract faults in the bearing according to Elforjani and Mba. 241 Moreover, these methods are; eigen-analysis, evelop analysis, entropy, signal shape factor (SHF), Prony’s energy method, regression and wavelet transform WT. Furthermore, statistical analysis and tools are employed. That includes kurtosis (KU), the root mean square (RMS), shape factor (SHF), impulse factor (IF), and crest factor (CF). Detecting the size of a natural defect on bearings whilst in operation is the main strong point for applying the proposed approach. However, single-fault detection and very high computation cost are the main disadvantages of this approach.
In Ferrando et al., 242 an envelope analysis based method for bearing FD is proposed. The method consists of the wavelet packet method and the Hilbert transform (HT). Moreover, in the feature extraction stage, the wavelet packet method is used as AE signal denoising and HT is used as envelope extraction and autocorrelation function. The main advantages of applying this approach are that the ability to identify localized defects in an incipient stage and dealing with the background noise capability whereas the signal-to-noise ratio (SNR) is very low with reduced computation cost. However, single-fault detection is the main disadvantage of applying this method.
Liu et al. 243 proposed a framework based on compressive sensing (CS) signal processing for the running state of the rolling bearing. Moreover, compressive sensing is applied to extract compressive features from the AE signal directly. As a result, simple, high efficiency, small input data and reduced computation cost are the main strength points of applying this approach. However, single-fault detection and sensitivity to the interferences are the main disadvantages of applying this method. In Sharma and Parey, 244 a mathematical model is developed as a fault mechanism of rolling element bearing. Furthermore, Hertzian contact, statistical concepts and contact load distribution approaches are all used in order to build the model. The ability to deal with contact load distribution during the load zone is the main advantage of this model. It has been noted that there is no noise consideration with this model.
In Holguín-Londoño et al. 245 vibration and AE analysis methodology based on filter bank similarity features is proposed. Moreover, as a feature extraction stage, empirical mode decomposition (EMD), wavelet packet transform (WPT) and Fourier-based filtering methods are applied to decompose the signals into several narrowband spectral components. After that, a similarity measure, that is, cumulative spectral density index, is used to obtain a feature vector. Finally, different types of faults are classified using K-nearest neighbors algorithm. Working in noisy environments with low SNR and the ability to diagnose multiple rotating machine faults are the main advantages of this methodology. The main disadvantage of applying this methodology is the very high computation cost.
Zhong et al. 246 introduced an intelligent FD of the IM framework. In the feature extraction stage, EEMD is used to decompose the signal into proper intrinsic mode functions (IMF). The correlation coefficient (CC) and singular value decomposition (SVD) are applied to eliminate the redundant IMF and obtain fault features. To add a new layer of improvement, five single classifiers based on probabilistic committee machine (PCM) and pairwise-coupled sparse Bayesian extreme learning machines (PCSBELM) are trained and used in the classification stage. The ability to diagnose both single and simultaneous faults and solving the multi-signal problem are the main advantages of using the proposed framework. Complex data calculations and sensitivity to the environmental noises are the main disadvantages of applying the proposed approach.
An automatic bearing FD and localization approach using vibration and AE is introduced in Jena and Panigrahi, 247 where many signal processing methods are applied. Moreover, WPT is applied first in order to identify the denoised signal. Then, smooth envelope signal (SES) and enhanced spectrogram coefficients techniques are employed. Furthermore, in order to localize faults in time domain, the corresponding enhanced time–frequency spectrogram is obtained using complex Morlet wavelet transform (CMWT) and a thresholding routine. Finally, a robust peak detection technique is applied. Real-time monitoring, 100% accuracy, multiple-fault detection and dealing with noise by using multiple layers of filtering are the main strength points for this approach. In the other side, very high computation cost is the main drawback. In Amarnath and Praveen Krishna, 248 an empirical mode decomposition (EMD) based approach of AE for diagnosis of faults in helical gears and rolling element bearings is proposed. By using the EMD approach, the AE is decomposed into several intrinsic mode functions (IMFs) based on the time domain analysis in order to seek the embedded intrinsic oscillation modes of the acoustic signal. As a feature extraction process, kurtosis and crest factor values are obtained and extracted from IMFs. Early and multiple-fault detection capabilities as well as the ability to decompose the signals into higher and lower frequency modes are the main advantages of this approach. However, poor classification capabilities and poor noise consideration are the main drawbacks of this approach. Table 2 summarizes AE based studies for CM and FD for bearings of IM.
AE based studies for CM and FD for bearings of IM.

Rotor faults
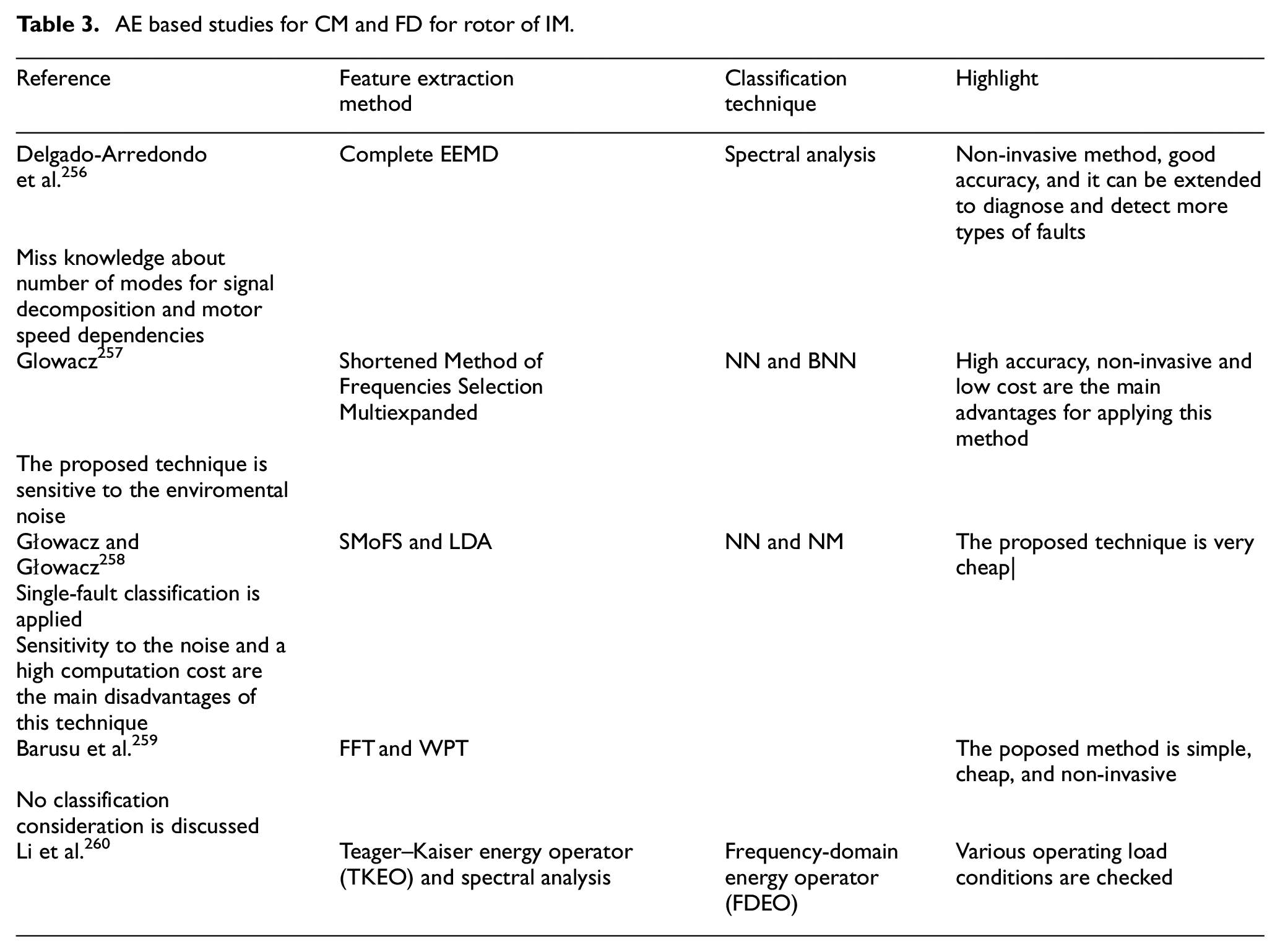
Detection of rotor faults is vital. 255 In Delgado-Arredondo et al., 256 AE and vibration signals are used together as a combined FD methodology. This proposed methodology uses the complete ensemble empirical mode decomposition (CEEMD) to seek the intrinsic mode functions (IMF). Gabor representation and the frequency marginal methods are applied to obtain the spectral content. The main advantages of this method are, a non-invasive method with good accuracy, and it can be extended to diagnose and detect more types of faults. Miss knowledge about the number of modes for signal decomposition and motor speed dependencies are the main disadvantages of applying this method. Glowacz 257 applied two feature extraction methods based on the frequency selection of AE. In the classification stage, the NN classifier, backpropagation NN (BNN), and word coding are applied as AE recognition. Very good results for real data, high accuracy, non-invasive and low cost are the main advantages for applying this method. The disadvantage of applying this method is the sensitivity to the environmental noises. In Głowacz and Głowacz, 258 a technique of early FD of rotor damages using AE is introduced. For a feature extraction from AE, a method called shortened method of frequencies selection (SMoFS-15) and linear discriminant analysis (LDA), are applied for real-world data of the motor. The nearest neighbor (NN) and nearest mean (NM) algorithms are employed in the classification stage. Importantly, the proposed technique is very cheap. Hazardously, the proposed technique can detect the faults, which have the same size and type. Moreover, sensitivity to the noise and a high computation cost are the main disadvantages of this technique. Table 3 summarizes AE based studies for CM and FD for rotor of IM.
AE based studies for CM and FD for rotor of IM.
Stator faults
Stator faults represent 38% of total IM faults. In Glowacz and Glowacz, 261 an early FD method of stator faults of the IM is introduced. In the feature extraction stage and to obtain the feature vector, a method called the selection of amplitudes of frequency is applied. Then, the linear perceptron, KNN, and K-Means clustering are all applied in the classification stage. The proposed approach is inexpensive and non-invasive. However, single-fault detection is the main disadvantage of applying this approach. In Glowacz, 262 an AE recognition system for detecting shorted stator coils faults in motors is proposed. In the feature extraction stage, the normalization method, Fast Fourier Transform (FFT), frequency selection technique, and neural network (i.e. BNN) are all applied. Moreover, word coding and NN classifiers are applied in the classification stage. On one hand, the proposed approach is simple, on the other hand, it has some limitations such as the ability to detect a single failure only and noise interference. Table 4 summarizes AE based studies for CM and FD for the stator of IM.
AE based studies for CM and FD for stator of IM.

Compound faults
Compund faluts CM and FD of IM using AE is recently discussed. In Glowacz, 263 bearing, stator and rotor FD methods of a single-phase IM using AE are proposed. In the feature extraction stage, a method called SMOFS-22-MULTIEXPANDED (Shortened Method of Frequencies Selection Multiexpanded) is implemented. NN classifier is applied in the classification stage. Early FD and compound fault detection capabilities are the main advantages of applying this approach. The main drawback of applying this approach is that the AE may interfere and mix (e.g. reflections, overlapping). Similarly, in Germen et al., 264 bearing (misalignment), bearing (ball defect), broken rotor bars and short circuit in stator winding IM faults are diagnosed and classified using AE data recorded by using several microphones. In the feature extraction stage depending on the recorded data, correlation and wavelet-based analyses are applied. Moreover, the self-organizing maps (SOM) method is used as a classifier. The proposed approach has given much attention to the classification stage. Furthermore, it has an ability not only to identify the possible differences between faulty and healthy motors but also to provide the definition of the fault type for all three groups (bearing, rotor and stator). However, the main drawback of applying this approach is the sensitivity to the environmental noises. Table 5 summarizes AE based studies for CM and FD for compound IM faults.
AE based studies for CM and FD for compound IM faults.

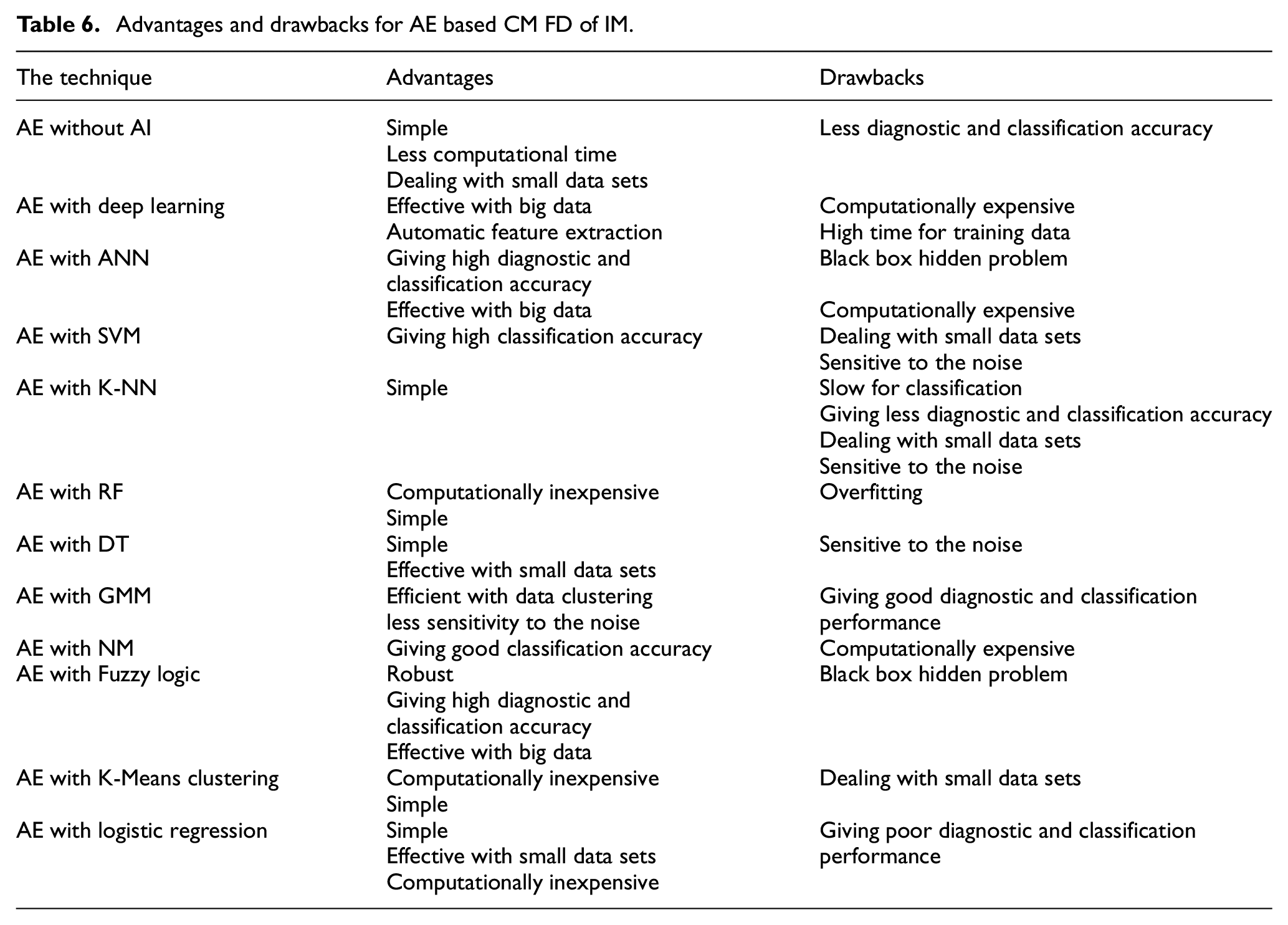
Table 6 summarizes advantages and drawbacks for AE based alogorithms for CM and FD of IM.
Advantages and drawbacks for AE based CM FD of IM.
Public datasets
Based on our review for the existing public datasets for AE-based CM and FD of IM including bearings, rotor, and stator, we were able to find only one dataset for bearing, which is Smart Health, Safety, Environment (SHSE) Lab Acoustic Emission (AE) Bearing (multi-crack bearing faults, including, inner, outer, and ball faults).253,267 We were able to spot only one dataset of bearing without any dataset for rotor and stator. However, as a future direction, we aim to generate data to provide such datasets.
Challenges and future trends
Intelligent CM and FD is considered as a key factor of fault diagnosis development. This section summarizes the challenges and the future trends of CM and FD based on sounds and AE for IM268–271:
AE data for CM and FD of machines still in infant stage. However, more contribution must be done to evaluate the performance of it.
Recent advances such as internet of things (IoT) and big data analytics must be used with AE to build a remote, continuous, online, accurate, and robust CM and FD techniques. 272
Rotor and stator FD based on AE needs more contributions and should be investigated more. 273
Fault localization and identification based on AE should be more investigated.
Compound CM and FD based on several types of data (vibration, current, image, etc.) along with AE may lead to better diagnostic capability.
AE considers to be efficient FD technique for low speed condition. However, more efforts should be given to evaluate AE based FD technique for moderate and high speed cases.
FD based on AE for multi- motor system, complicated faults, and for several types of RM have to be evaluated.
Building an FD system based on AE with taking into consideration all advantages of each algorithm may lead to immune system.
Compound FD approaches for all faults of IM still needs more contributions.
Very recently, DL becomes the hero and it overcomes the drawbacks of traditional ML. However, more efforts should be done to befit from it in the field of CM and FD.
Generating public datasets for stator and rotor CM and FD of IM are crucial. 274
Conclusion
Importantly, enhance the reliability, availability, safety and reducing maintenance cost of modern industrial systems and applications is crucial. Thus, follow up the health and the remaining useful life (RUL) in modern industrial machinery (i.e. IM) is vital. However, finding the best diagnostic method is challenging. Recently, acoustic emission (AE) becomes a very accurate and efficient FD and monitoring techniques for IM. Thus, in this paper, a general descriptive review for diagnostics methods of IM based on AE is presented. Moreover, FD methods for bearing faults, stator faults, and rotor faults of IM are discussed. The advantages and limitations of each method are also highlighted. As a main conclusion for the proposed study, AE data for CM and FD of machines still in the infant stage. However, more contribution must be done for intelligent FD based on AE to evaluate its performance.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.