
Abstract
Aiming at the dynamic characteristics test bench of sliding bearings, the dynamic model is established. Based on the forward and inverse dynamic problems of the bearing, a simulation evaluation method for the identification accuracy of the sliding bearing dynamic characteristics is proposed and the algorithm is verified. The identification errors of dynamic characteristic coefficients under different excitation frequencies are analyzed, the sensitivities of single frequency excitation method and dual-frequency excitation method to test error are contrastively analyzed, and the influence laws of dynamic characteristic identification accuracy of sliding bearing are evaluated. Based on which the traditional single frequency excitation method has been improved. The dynamic characteristic test should be carried out respectively in the low frequency range and the high frequency range. The main stiffness and cross damping are the average of two tests, the main damping is the identification value in the high frequency, and the cross stiffness is the identification value in the low frequency. That will effectively reduce the impact of test error. The obtained data and laws could support the improvement of the dynamic characteristics test method of sliding bearings and the confirmation of test parameters, thereby the accuracy of dynamic characteristics identification is improved.
Keywords
Introduction
The sliding bearings are widely used in various industrial fields, because of the advantages of large carrying capacity and long life.1,2 It is an important supporting component in rotating machinery. A relatively well-developed theoretical system has been established for hundreds of years,3–5 but in practical applications, the service performances of the bearing are usually greatly different from the theoretical analysis results, especially the dynamic characteristics.6,7 In linear theory, the dynamic characteristics of bearings are characterized by stiffness and damping coefficients, mainly using conventional 8-coefficient model,8,9 frequency-varying 8-coefficient model,10,11 complete dynamics model,12,13 etc. Among them, the conventional 8-coefficient model is the basis. The dynamic characteristic coefficients of the bearing are generally obtained by the experimental methods.14,15
There are many methods to identify dynamic characteristics, which can be mainly divided into time domain method and frequency domain method. The time domain method includes hammering method, pulse excitation method,16,17 etc. The frequency domain method includes unbalanced response method, sine excitation method and multi-frequency excitation method, etc.18–20 All of these methods can obtain the dynamic characteristic coefficients of the bearing, but the test results are often quite different from the theoretical value. Al-Ghasem and Childs 21 tested a 5-pad tilting-pad bearing with a diameter of 117 mm and compared it with the theoretical value of San Andrés et al. 22 In general, the stiffness coefficient differs by 10%–30%, and the damping coefficient differs by 10%–40%. Delgado et al. 23 identified the main stiffness of 4-pad and 5-pad tilting-pad bearings with 110 mm diameter on a test rig. The difference between the test value and theoretical value of 4-pad bearing is about 25%–55%. The domestic researches on bearing dynamic characteristics identification were started in the 1990s. Jiang et al. 24 firstly identified the dynamic characteristics coefficients of 50 MW steam turbine bearings on a dynamic balancing machine, and the identification results are the same order of magnitude as the theoretical values. Although there are many theoretical and experimental studies on the dynamic characteristics of sliding bearings at home and abroad, the results of the dynamic characteristics identification are not satisfactory. The main reason is that the dynamic characteristics identification process is very complicated and the influence factors are numerous, which brings great difficulties to the accurate measurement of dynamic characteristic coefficients.25,26
For the sliding bearing test bench, a simulation evaluation method for the identification accuracy of dynamic characteristics based on the forward and inverse dynamic problems of the bearing is proposed in this paper. The influence of the exciting frequency on the identification accuracy of the dynamic characteristics considering the test error is analyzed. And the test method is improved to reduce the impact of test errors, so as to improve the accuracy of dynamic characteristics identification.
Frequency domain principles and methods for the dynamic characteristic test of sliding bearing
Basic structure and dynamic model of sliding bearing test bench
The structure of the sliding bearing test bench is shown in Figure 1. The main part of the test bench mainly includes the support system, the test bearing system, the dynamic loading system, and the static loading system, except the auxiliary systems such as the driving system and the lubrication system. The dynamic model of the test bench system is shown in Figure 2, considering the connection stiffness and connection damping of the loading system.

Schematic diagram of the structure of the test bench (excluding the dynamic excitation device).
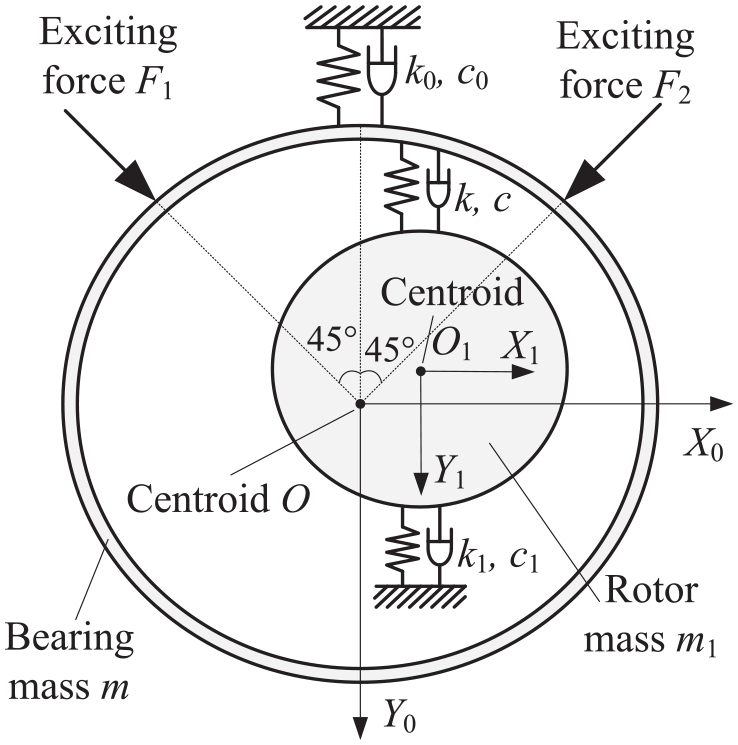
Dynamic model of test bench system.
The dynamic differential equations of the system are as following, under the assumption that the excitation forces pass through the geometric center of the bearing, and the bearing moves in a plane. The bearing and rotor don’t swing.
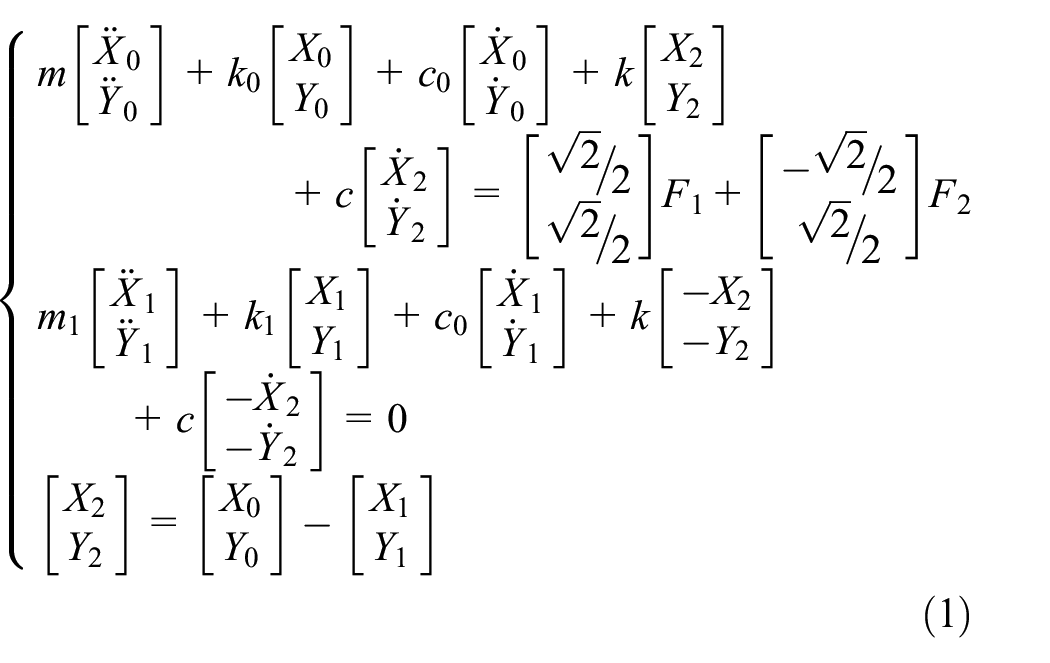
Where, F1 and F2 are the excitation forces. X0 and Y0 are the absolute displacements of the test bearing relative to the static equilibrium position, X1 and Y1 are the absolute displacements of the rotor at the test bearing, X2 and Y2 are the displacements of the test bearing center relative to the rotor center. m and m1 are respectively the test bearing mass and the rotor mass. k0 and c0 are the connection stiffness and damping coefficients, which are both 2 × 2 matrices,
Frequency domain method and measurement equation of dynamic characteristic identification
In practical working conditions, the system is affected by non-active excitation interference force, out-of-round bearing, temperature excursion of the test system, and material non-uniform, it is difficult to establish the principle and method of dynamic characteristic identification in the of time domain. However, some of the above factors are periodic, so the frequency domain method can be used to eliminate their influence. The main methods include single frequency excitation method and dual-frequency excitation method.
The single frequency excitation method is to apply the harmonic excitation force of the same frequency (ω) twice respectively in two directions of the bearing. The dynamic differential equations (1) are carryed out by Fourier Transform, substituting
Then X1 and Y1 are eliminated. The measurement equations of the single frequency excitation method can be obtained as shown in equation (2).

Where, X01(ω), Y01(ω), X21(ω), Y21(ω) are the displacements caused by the first excitation. X02(ω), Y02(ω), X22(ω), Y22(ω) are the displacements caused by the second excitation.
The dual-frequency excitation method refers to apply the harmonic excitation forces of different frequencies (ω1 and ω2) simultaneously in the two directions of the bearing. The measurement equations are shown in equation (3).

Where, X′01(ω1), Y′01(ω1), X′21(ω1), Y′21(ω1) are the displacement of the corresponding frequency ω1. X′02(ω2), Y′02(ω2), X′22(ω2), Y′22(ω2) are the displacement of the corresponding frequency ω2.
Accuracy evaluation method and verification of dynamic characteristic identification based on forward and inverse problem
Quantitative analysis of dynamic characteristic identification accuracy based on forward and inverse problems
Taking the single frequency excitation method as an example, the forward problem is to solve the displacement responses of the bearing according to the excitation forces and bearing stiffness and damping coefficients. The inverse problem is to identify the stiffness and damping coefficients of the bearing based on the amplitudes, frequencies, and phases of the excitation force signals and vibration signals.
Algorithm for solving the forward problem
In Figure 1, when an excitation force with a frequency of ω is applied in the −45° direction, set F2 = 0, then:

Substituting the expressions of the stiffness and damping coefficients into equation (4), it can be expanded in the form of real and imaginary parts as following:

Where,



Since A1 and C1 are known, and A1 is an 8 × 8 matrix, the absolute displacements of bearing X01(ω), Y01(ω) and the displacements of the bearing X21 (ω), Y21 (ω) relative to the rotor under the excitation force F1 can be obtained by solving the matrix equation B1 = A1−1C1.
Similarly, when an excitation force with a frequency of ω is applied in the +45° direction, the displacements of bearing X02(ω), Y02(ω) and displacements of the bearing X22(ω), Y22(ω) relative to the rotor can be obtained by solving the matrix equation B2 = A2−1C2.
Algorithm for solving the inverse problem
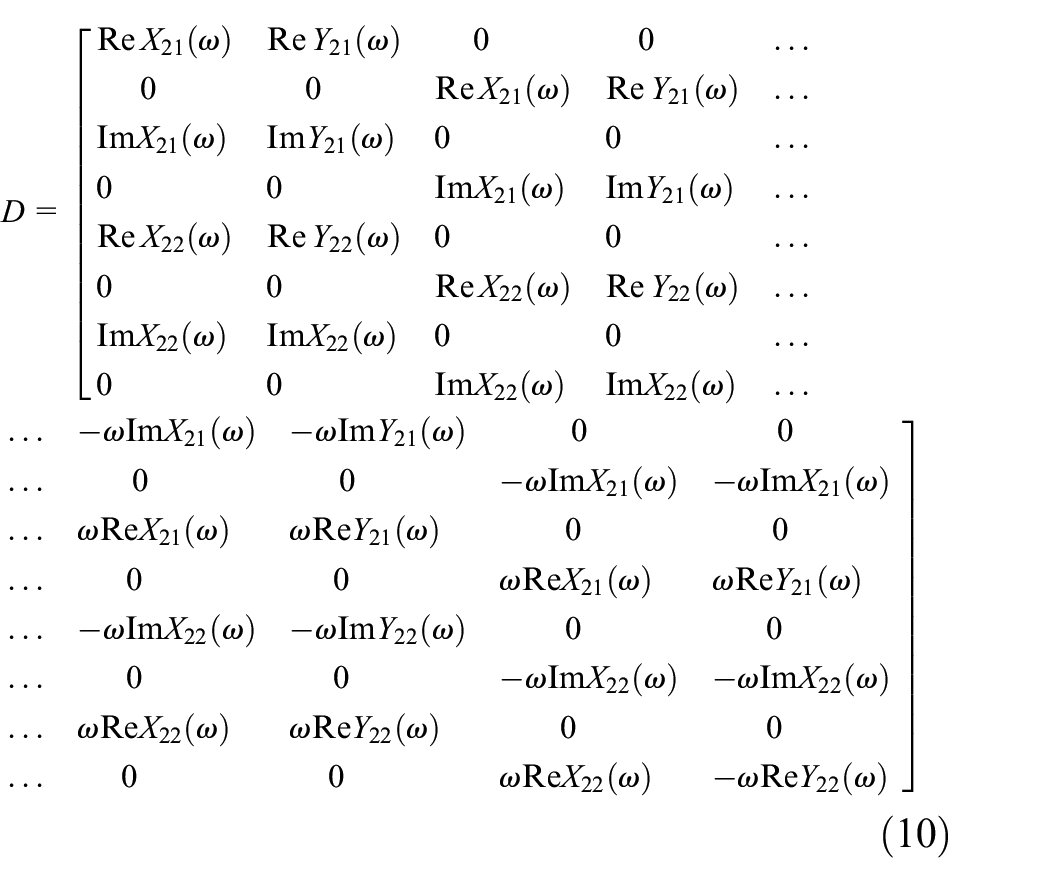
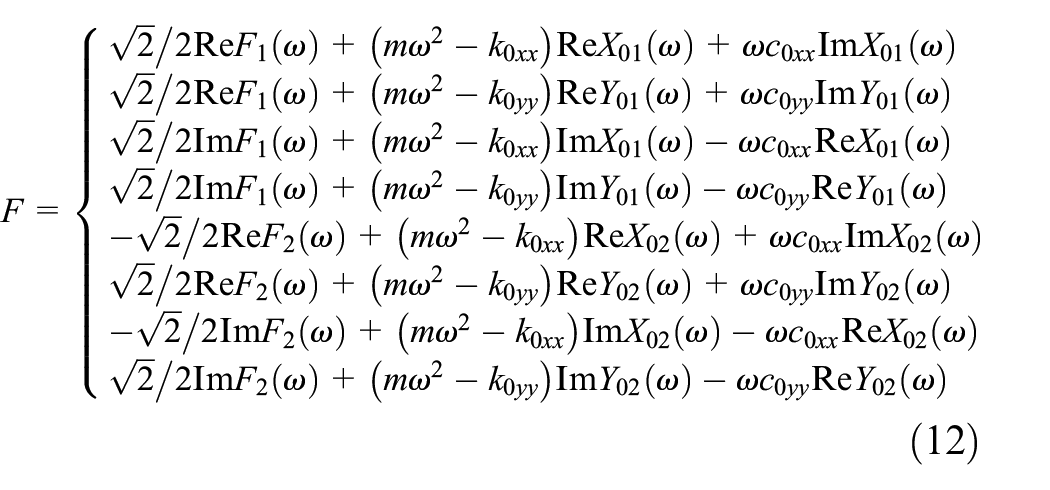
According to equation (2), the relative displacements and absolute displacements of the bearing are X21(ω), Y21(ω), X01(ω), Y01(ω) under the action of excitation force F1, the relative displacements and absolute displacements of the bearing are X22(ω), Y22(ω), X02(ω), Y02(ω) under the action of excitation force F2. Substituting the stiffness and damping coefficient matrixes expression into equation (2), it can be transform to marix form as following:

Where, the value of the matrix D and F are known, the eight coefficients of the stiffness coefficient k and damping coefficient c can be obtained by solving the matrix equation E = D−1F.
Where,

Quantitative analysis of identification accuracy of dynamic characteristics
The basic method used in this pepper is to compare the identification values of k and c with the given values. Firstly, the excitation forces, bearing stiffness k and damping c are given, the amplitudes Ax2, Ay2, Ax, Ay and phases φx2, φy2, φx, φy of relative and absolute displacements of the bearing under the action of F1, and the relative and absolute displacements amplitudes A′x2, A′y2, A′ x , A′ y and phases φ′x2, φ′y2, φ′ x , φ′ y of the bearing under the action of F2 are obtained according to the forward problem algorithm. Then the test error is added directly as fomula (13) to the bearing displacement data obtained by the simulation, and the results are taken as the vibration test data of the dual-frequency excitation method.

Where, Am0, φ0 and Am, φ are the signal amplitude and phase before and after adding test error. αA and αφ are respectively the relative error of amplitude and the absolute error of phase.
Then the stiffness k′ and damping c′ of the bearing can be identifed according to the algorithm of inverse problem. So that the identification accuracy ε of the dynamic characteristic coefficients can be evaluated by comparing the given values k, c and the identification values k′, c′:

It should be noted that if the identification error is positive, the identification value is less than the given value, otherwise it is greater than the given value.
Algorithm verification of accuracy evaluation of dynamic characteristic identification
Basic parameters of the case
For a sliding bearing dynamic characteristics test bench system, the tested bearing is a tilting-pad bearing, the supporting bearing is rolling bearing, and its damping characteristics are ignored. The basic parameters of the test bench system and the tested bearing are shown in Table 1.
Basic parameters of a bearing test system (including the stiffness and damping parameters of the tested bearing).

Analysis of dynamic characteristics identification results
Taking the excitation frequency as 20 Hz, the amplitude and phase of the relative displacements and absolute displacements of the bearing under the excitation forces F1 and F2 are calculated respectively according to the forward problem, as shown in Table 2.
The relative and absolute vibration of the bearing under the action of excitation forces F1 and F2.

Then the identified stiffness and damping coefficients without the test error are shown in Table 3, according to the algorithm of inverse problem. The identified stiffness and damping coefficients are shown in Table 4, without considering the test error. It can be seen from the calculation results that the errors between the identification values and the given values are very small, and they are related to the data truncation errors in the calculation process. The more accurate the data values are, the smaller the stiffness and damping errors are. So the algorithm has better accuracy in identifying the dynamic characteristic coefficients, which verifies the correctness of the algorithm.
Comparison of simulation results and given values for identification of dynamic characteristic coefficients of bearings.

Comparison of identification accuracy of bearing dynamic characteristic coefficients under both amplitude and phase errors.

Analysis of the influence of test error on the accuracy of dynamic characteristic identification
In practice, due to the transmission error of the hardware and the external disturbance during the test, the test signal inevitably has an error with the true value, including amplitude error and phase error. The identification accuracy of the dynamic characteristic coefficients of the bearing according to the previous algorithm when there is only amplitude error or phase error under the excitation frequency of 50 Hz are shown in Figures 3 and 4. The results show that when there is only the amplitude error, the identification errors of the dynamic characteristic coefficients increase with the increasing of the amplitude error of the test signal. When the amplitude error is small (for example, 5%), the identification error of the dynamic characteristic coefficients is equivalent to amplitude error, and when the amplitude error is large (for example, 20%), the identification error (16%) of the dynamic characteristic coefficients is slightly smaller than the amplitude error. When there is only phase error, the sensitivity of the identification error of the dynamic characteristic coefficients to the phase error of the test signal is different. The identification values of main stiffness and cross damping are almost unaffected, and the identification errors of cross stiffness and main damping increase with the phase error, and the identification error of main damping is most affected by the phase error, and the identification error of cross stiffness is affected next. For example, when the phase error is 1°, the identification errors of main stiffness and cross damping are both less than 1%, but the identification error of cross stiffness reaches −5%, and the identification error of main damping reaches 25%.
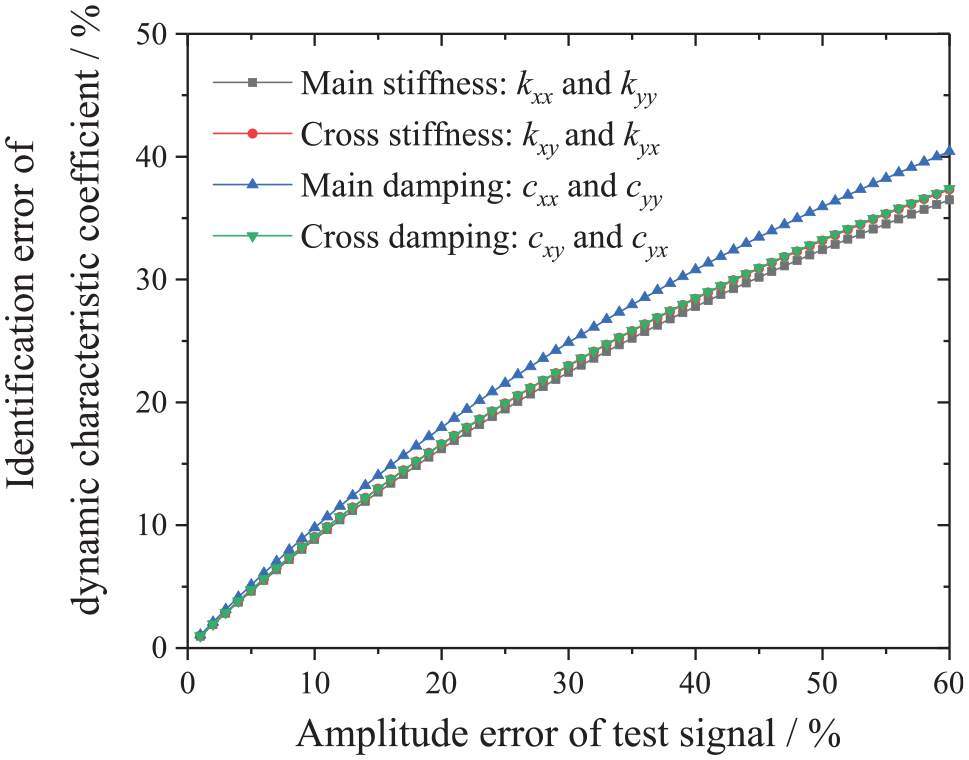
Identification error of bearing dynamic characteristics under different amplitude errors.

Identification error of bearing dynamic characteristics under different phase errors.
When the test signal has both amplitude error and phase error, the errors between the dynamic characteristic identification results and the given values are shown in Table 4. Comparing the data in Table 4 with Figures 3 and 4, when the test signal has both amplitude and phase errors, the impact on the identification accuracy of the dynamic characteristic coefficients is basically the superposition of the effects of two separate errors.
Research on the influence of excitation frequency and testing method on the accuracy of dynamic characteristic identification
Vibration response analysis of bearing test bench system
For the sliding bearing test bench shown in Figure 1, the tested bearing is a tilting pad bearing. Considering the symmetry, the vibrations of the bearing and the rotor in the X direction are focused on in this paper. The amplitude and phase of vibration responses of bearing and rotor at different excitation frequencies are shown in Figures 5 and 6, which is the frequency response function.

Frequency response function of bearing vibration in X direction: (a) amplitude frequency characteristics and (b) phase frequency characteristics.

Frequency response function of rotor vibration in X direction: (a) amplitude frequency characteristics and (b) phase frequency characteristics.
According to the dynamic model of rotor bearing system, the equivalent stiffness Kb and equivalent damping Cb of the bearing in the X direction are as following:

Similarly, the equivalent stiffness Kr and equivalent damping Cr of the rotor can be obtained respectively as 6.9 ×108 N/m and 1.32 ×104 N/m. Using the analytical process of vibration mechanics, the undamped natural frequency fbn and the damped natural frequency fbd of the bearing can be obtained as following:
Similarly, the undamped natural frequency frn and the damped natural frequency frd of the rotor are respectively 453.54 and 453.37 Hz.
By comparing the results of the vibration response, it can be seen that the bearing has an obvious resonant frequency (275 Hz), which is very close to the damped natural frequency of the bearing vibration, which is about 285 Hz, and the phase is 90°. For the rotor, it can be seen that there are two more obvious resonance peaks. The frequency of one is 461 Hz, which is close to the natural frequency of the rotor vibration (453.37 Hz). The phases of the bearing and the rotor are both close to 180° near this frequency.
Analysis of the influence of excitation frequency on the identification accuracy of dynamic characteristic
Considering the accuracy of the general test, the amplitude error and the phase error of the test signal are respectively selected as +5% and +1° for analysis. 27 The variation curves of the identification error of the bearing dynamic characteristics under different excitation frequencies are shown in Figure 7. The identification error of the main stiffness goes through the zero point when the frequency near 262 Hz. The identification error of the main damping goes through the zero point when the frequency near 369 Hz. And the identification error of the cross damping goes through the zero point when the frequency near 403 Hz. The cross stiffness identification error is more sensitive to frequency, and the values in the low frequency range are relatively small.

Identification error of bearing stiffness and damping coefficient under different excitation frequencies (amplitude error is 5% and phase error is 1°): (a) integrated graph and (b) partial enlarged detail.
When there is a error in the test signal, the test accuracy of the main stiffness and cross damping in the low frequency range is high. The error is basically equal to the amplitude error of the test signal, and it slowly decreases with the increasing of frequency. The identification result of the main stiffness is almost no error when the frequency near 262 Hz, which means that it is not affected by the test error. The identification error of main damping is relatively large in the low frequency range, and relatively small in a range of high frequency, which is about 0 near the frequency of 369 Hz. The identification error of cross stiffness is very sensitive to the phase error, so it is difficult to test accurately, and relatively small in the low frequency range. When the excitation frequency is in the uncertain area, the dynamic characteristic identification error is very sensitive to the test frequency and the curves fluctuate a lot. The possible reason is that the rotor resonates in this area and the test results are unreliable. So the excitation frequency during the test should not fall in this area.
In an actual test, the test signal generally has both amplitude error and phase error. In order to eliminate or reduce the impact of these errors on the identification accuracy of dynamic characteristics, the choice of excitation frequency is also very important in the test method, except to improve the level of test software and hardware to reduce the error of the test signal. Through the analysis of the frequency corresponding to the zero-crossing point of the above curves, the identification error of the main stiffness and cross damping is positive or negative in the range of low frequency and high frequency (less than the resonant frequency). Therefore, it is suggested that the dynamic characteristic test should be carried out respectively in the low frequency range and the high frequency range (less than the resonant frequency) using the single frequency excitation method. Based on the data of two tests, the main stiffness and cross damping are the average values of the two tests, the main damping is the identification value in the high frequency, and the cross stiffness is the identification value in the low frequency. For example, taking the excitation frequency as 40 and 260 Hz respectively, the data of two tests and the final dynamic characteristic coefficients are shown in Table 5.
Identification accuracy in low and high frequency range.

Comparison of identification accuracy betweenthe single frequency excitation method anddual-frequency excitation method
Comparison of the identification accuracy of excitation in the low frequency range
For the single frequency excitation method and dual-frequency excitation method, the biggest difference lies in the excitation frequency. Considering that the excitation frequency has a more obvious influence on the accuracy of dynamic characteristics identification. The identification accuracies of the two methods are analyzed when there is test error under different excitation frequencies, which is the sensitivity to the error.
In the low frequency range, the excitation frequencies are respectively 30 and 60 Hz. When the test signals exist the amplitude error of +5% and the phase error of +1°, the comparison of the identification accuracy of the two test methods is shown in Table 6.
The identification accuracy comparison of the two test methods in the low frequency range.

In the low frequency range, the identification accuracy of the main stiffness and main damping of the dual-frequency excitation method is between that of the single frequency excitation method at the two frequencies, and both have good identification accuracy. But the identification accuracy of the cross stiffness and cross damping becomes very poor.
Comparison of the identification accuracy of excitation in the high frequency range
In the high frequency range, the excitation frequencies are respectively 260 and 370 Hz. When the test signals exist the amplitude error of +5% and the phase error of +1°, the comparison of the identification accuracy of the two test methods is shown in Table 7.
The identification accuracy comparison of the two test methods in the high frequency range.

In the high frequency range, the single frequency excitation method can only identify one main parameter (main stiffness or main damping) with high accuracy at one frequency. The identification accuracy of the main stiffness and main damping of the dual-frequency excitation method is between that of the single frequency excitation method at the two frequencies, but the two main parameters can be obtained at one time with high identification accuracy. The identification accuracy of the cross stiffness and cross damping also becomes very poor.
Comparison of identification accuracy of both low frequency and high frequency excitation
In the low and high frequency range, the excitation frequencies are respectively 30 and 260 Hz. When the test signals exist the amplitude error of +5% and the phase error of +1°, the comparison of the identification accuracy of the two test methods is shown in Table 8.
The identification accuracy comparison of low frequency and high frequency excitations.

Through the combined excitation of high frequency and low frequency, the identification accuracy of the main stiffness and main damping coefficients may be improved, but the influence of the error of cross stiffness and cross damping is amplified, and the test results are unreliable.
In summary, the identification error of the main stiffness and main damping identified by the dual-frequency excitation method is basically the average of that of the single frequency excitation method at two frequencies. This can reduce the adverse effect of the improper selection of the test frequency of the single frequency excitation method to some extent, but the influence of the test error on the identification accuracy of the cross stiffness and cross damping is amplified, which makes the identification error of the cross stiffness and cross damping large and the test results unreliable.
Conclusion
Taking the bearing dynamic characteristics test bench as an example, a simulation evaluation method for the identification accuracy of the sliding bearing dynamic characteristics based on the forward and inverse dynamics problem of the bearing is proposed. The influence of the amplitude error and the phase error on the identification accuracy of the dynamic characteristics is analyzed. The results show that when there is only the amplitude error, the dynamic characteristic identification error is basically equivalent to the amplitude error. When there is only the phase error, the identification results of the main stiffness and cross damping identification are almost unaffected, but it has a great influence on the identification results of the cross stiffness and main damping. When there are both amplitude and phase errors, the influence on the identification accuracy of the dynamic characteristic coefficients is basically the superposition of the effects of two separate errors.
Based on the analysis of the influence of excitation frequency on the identification accuracy of dynamic characteristics, the traditional single frequency excitation method is improved. It is suggested that the dynamic characteristic test should be carried out respectively in the low frequency range and high frequency range (less than the rotor resonance frequency). The main stiffness and cross damping are the average of two tests, the main damping is the identification value in the high frequency, and the cross stiffness is the identification value in the low frequency.
The influence of excitation frequency on the identification accuracy of the single frequency excitation method and dual-frequency excitation method is compared and analyzed. When the dual-frequency excitation method is used to identify the dynamic characteristic coefficients, the identification error of the main stiffness and the main damping is basically the average of that of the single frequency excitation method at the two frequencies, but the dual-frequency excitation method makes the identification error of the cross stiffness and cross damping large.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This paper was supported by the National Natural Science Foundation of China (grant number 11802232), the National Key R&D Program of China (grant number 2018YFB2000505), the Scientific Research Program Funded by Shaanxi Provincial Education Department (grant number 18JK0569), and China Postdoctoral Science Foundation (grant number 2021MD703875).