
Abstract
In recent years, breast cancer incidence has increased year by year, which makes research on treatment methods critical. Intervention surgery is a new development in breast cancer treatment. However, the operation is complicated and lasts for a long time. The doctor’s operation can no longer meet clinical needs. The breast intervention robot has the characteristics of minimal invasiveness, operability, and high flexibility so that it can compensate for the shortcomings of traditional interventional surgery. The combination of the robotic system and medical imaging technology is an important means to determine the lesion location and plan the puncture path. This article mainly reviews the breast intervention robot under image navigation. Based on existing literature, image navigation methods are divided into MRI, ultrasound, and CT for the introduction. First, we summarized the principles and technologies associated with materials, sensors, and actuators used in the MRI-guided breast intervention robot. In particular, the actuation is analyzed and compared in detail. Subsequently, the ultrasound-guided and CT-guided breast intervention robots are introduced. After that, we discuss the image-guided positioning technology. Finally, we summarize the research progress and trends in the future development of breast intervention robots under image navigation.
Introduction
Breast cancer is the most commonly diagnosed cancer in women and the leading cause of cancer deaths among them. Statistics indicate that the incidence of breast cancer is increasing year by year. 1 In 2018, approximately 2.1 million cases of female breast cancer were diagnosed worldwide, accounting for one-quarter of the total number of female cancer cases. 2 Traditional breast tumor treatment methods include classical radical mastectomy, modified radical mastectomy, mastectomy, etc.3–5 These methods damage the breast function of patients, result in aesthetic problems, and have typically slow recovery times. The recently developed interventional therapy is an emerging diagnosis and treatment method that integrates medical imaging technology and clinical treatment. With the help of medical imaging technologies, doctors use puncture needles, catheters, guide wires, and other medical equipment to perform interventional surgery on the lesion. Medical imaging technology is a tool to help doctors observe the operation process better. The main medical image guidance methods for diagnosing breast diseases are mammography, CT, ultrasound, and MRI. Mammography is the main method for breast cancer screening and detection, which successfully reduced breast cancer mortality. 6 CT has high application value in tumor diagnosis. Ultrasound imaging has become an indispensable medical imaging method with its excellent economic benefits and real-time capabilities. Among the current clinical imaging methods, MRI has the highest sensitivity for detecting breast cancer and is the preferred breast tumor imaging method. 7 It has become an auxiliary diagnostic method for specific patient populations. 8 Medical imaging is of great significance to the diagnosis and treatment of early breast cancer, and provides more possibilities for minimally invasive surgery. Breast interventional surgery is minimally invasive, and requires highly skilled and experienced doctors. Small wounds pose difficulties for surgeons and may result in residual diseased tissue and even damage normal tissue. Moreover, the operation process is often complicated and lengthy, which is not easy for diagnosis and targeted treatment. In addition, breast tissue has strong fluidity, and the internal tissue properties vary greatly. For different patients, the organizational structure is also very different. All of these make it more difficult to analyze, diagnose, and treat breast diseases. The data of minimally invasive breast surgery show that the long operation time and complicated operation process lead to high labor intensity of doctors, which affects the quality of the operation and reduces the accuracy of the operation. 9 With the development of medical technology, people are pursuing more sophisticated breast treatment methods.
In recent years, with the continuous development of artificial intelligence, the application of robotics in the medical field has become more and more extensive.10,11 The robots have the ability to work in a narrow space, good stability, and high efficiency, which are difficult for humans to achieve, so they can replace the doctor to complete more sophisticated clinical operations.12–15 Human-computer interaction is realized while improving the accuracy of robot surgery. Larson et al.16–18 proposed an MRI-guided robotic system for minimally invasive breast biopsy. It is used in a closed nuclear magnetic instrument. The computer system controls the robot to adjust the position of breast tissue and probe in real time (Figure 1(a)). Mallapragada et al. 19 developed a robotic system using a hybrid control method. It controls the displacement of breast tumors in real time by applying external forces (Figure 1(b)). Yang et al.20–22 designed a master-slave surgical system that can perform breast biopsy under continuous MRI imaging. The robot is remotely operated. The main robot provides an intuitive operation platform for doctors. Experiments show that the driven robot can meet MRI compatibility and safety (Figure 1(c)). Jia et al. 23 designed a novel double tendon-sheath transmission robot system under MRI environment. They compensate the friction and hysteresis caused by the long-distance transmission, and the precise control of the robot is realized (Figure 1(d)). The new Stormram series robotic system was developed by Groenhuis et al.24–30 for breast biopsy (Figure 1(e)).
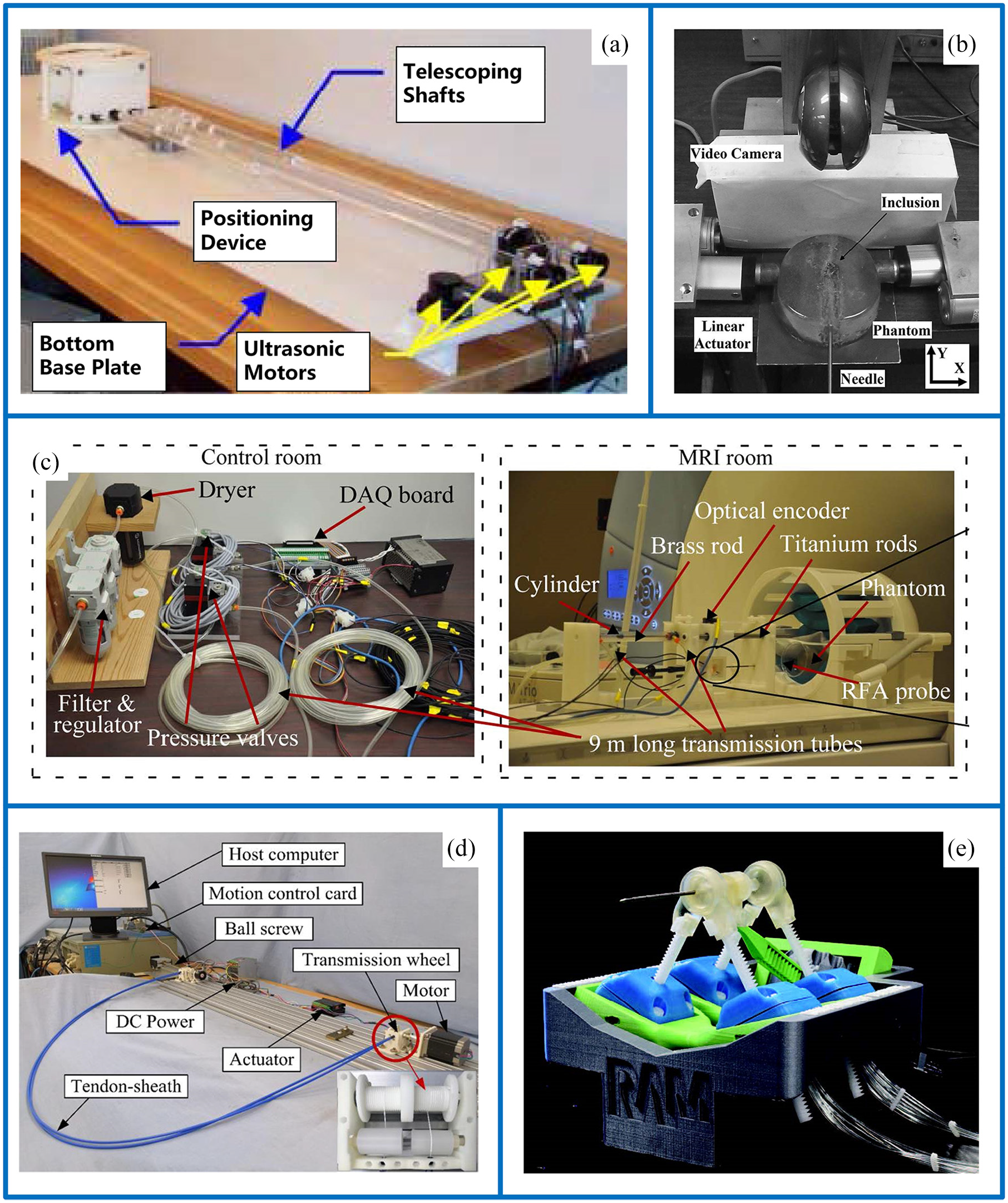
The breast intervention robot currently developed: (a) overview photograph of the device for breast biopsy, (b) robot-assisted real-time tumor manipulation for breast biopsy, (c) 1-DOF MRI compatible pneumatic system, (d) experimental setup of tendon-sheath transmission system, and (e) MRI compatible biopsy robot Stormram 3.
At present, the main medical image guidance methods of breast intervention robots are MRI, ultrasound, and CT. This article mainly introduces the principle and technology of breast intervention robot guided by these three imaging methods. As the design of the robot is limited by the MRI environment, the materials, sensors, and actuations are introduced in detail. Among them, the actuations are divided into four categories. They are introduced and compared in detail. Image-guided positioning technology is one of the key research directions for breast intervention robots. This article summarizes and discusses it. Finally, the research progress and future development trends of breast intervention robots are summarized.
Development history and basic structure of breast intervention robot
Development history
As early as the 1980s, robotics was applied to surgery. The researchers completed the neurosurgery biopsy operation with the help of industrial robotic platforms. 31 Since then, more scholars and research teams have devoted themselves to the study of medical robots. In the 1990s, minimally invasive surgical robots attracted more attention. In 1999, Intuitive Surgical released the Da Vinci surgical robot system. And it was officially put into use in 2000. 32 Kaiser et al. 33 introduced the first MRI-guided interactive surgical robot system for breast biopsy and treatment in the same year. After that, great progress has been made in the research and development of breast intervention surgery system (Table 1).
The typical breast intervention surgery robots and their advancements for applications.

Due to the limitation of technical conditions, the design of the robot structure and control system was inadequate in the early stage. Therefore, most of them only stay in the development stage. 45 It is vital to improve the accuracy and safety of the surgery, which makes the breast intervention robot reach the level of clinical application. On the one hand, according to the characteristics of breast fluidity, the robot structure (breast stabilization device, end-effector, and robot body) is designed to limit the displacement of the lesion point and reduce the needle-tissue deviation. 46 On the other hand, it is necessary to improve the navigation and control system to identify and precisely puncture the lesion location.
System framework, operation procedure, experiment and device
System framework
The breast intervention robot system is usually composed of navigation system, breast fixation device, robot body (the manipulator and end-effector), and control system. The navigation system is mainly used in preoperative localization and path planning, and guides the puncture process during the surgery. The breast fixation device cooperates with the robot body to realize a more stable puncture process. The mechanical arm controls the end-effector to adjust the needle entry point and angle according to the control signal. The control system is the core of the whole robot system, which controls the breast intervention robot comprehensively.
Operation procedure
Before the operation, the image acquisition, segmentation, and reconstruction were carried out on the diseased tissue. The navigation system locates the target point and plans the puncture path. The robotic arm guides the end-effector to puncture according to the preoperative path planning. The navigation system tracks and detects the end-effector in real time to reach the target point. The sensor feeds back the joint rotation angle and joint displacement information, so that the control system can adjust the robot’s pose in time. During the whole operation, puncture path planning and robot puncture posture adjustment are the main factors to ensure the therapeutic effect. This is mainly because of the fluidity and anisotropy of breast tissue. The tissue shape and needle-tissue force change, so it is difficult to achieve precise puncture. Figure 2 shows the overall structure of the breast intervention robot system.

The overall structure of the breast intervention robot system.
Experiment and device
Researchers have conducted various experiments and tests on breast intervention robots. Jiang et al. 37 proposed an adaptive proportional-integral-derivative control theory with friction compensation for breast biopsy puncture robots, with an in vitro experimental error of 0.68 mm. Park et al. 40 developed a breast biopsy puncture robot guided by magnetic resonance images. The experiment shows that the maximum error is 0.86 mm. Lu et al. 44 developed a new MRI-guided breast intervention robot and conducted an in vitro model experiment. The robot positioning error is 0.37 mm.
Although the intervention robots have different degrees of advantages over free-hand puncture, this technology is still in the laboratory phantom experiment and animal experiment stage, and has not yet entered clinical applications and come to product level. The reason may be that the puncture errors of most puncture robots do not meet the requirements of the specific puncture operation. With the increase of autonomous function of breast intervention robots, the challenge to regulatory rules is also increasing. In the future, the supervision of breast intervention robots will be more and more strict.
MRI-guided breast intervention robot
Introduction to MRI-guided breast intervention robot
In 1977, Professor Raymond Damadian of New York University led the team to obtain the first human magnetic resonance imaging using the medical MRI equipment they developed. 47 From then on, the application of magnetic resonance imaging in the medical field has developed rapidly. In the 1980s, as a new type of medical imaging technology, MRI was formally used in clinical diagnosis. MRI technology has become more and more mature in recent years. It is widely used to diagnose important organs, such as brain, 48 cardiovascular system, 49 breast,7,50 and lung. 51 It has become an important means to guide clinical treatment.
MRI is to apply radio frequency pulses of a certain frequency to the human body in static magnetic field. The hydrogen protons in the human body are excited and magnetic resonance occurs. In the imaging process, ionizing radiation will not be produced, and doctors and patients will not be harmed by radiation. Compared with other imaging methods, MRI has excellent soft tissue resolution. Multi-directional and multi-sequence medical images can provide accurate geometric feature information of breast tissue. MRI has outstanding advantages in the diagnosis and treatment of breast lesions. MRI has high detection sensitivity, which is of great significance for the early detection and diagnosis of breast diseases. 52 However, the principle and method of magnetic resonance imaging are rather special. Magnetic and conductive materials in MRI equipment will cause image distortion. The operation process cannot be wholly completed in the MRI equipment. 53 Usually, the image of the lesion tissue is collected in the MRI equipment. The puncture point and puncture path are planned. Then, the patient was removed from the imaging device for interventional therapy. During the movement, the breast tissue will be displaced. The needle-tissue force will cause the tissue deformation during the puncture, which will change the lesion position and puncture path, so it is necessary to compensate for the tissue deformation. 30 Traditional surgical methods are difficult to locate accurately at a time so that the surgical process may be repeated many times. This method reduces the efficiency and accuracy of puncture and makes patients suffer more pain.
The robot system has been widely used in minimally invasive surgery. Robot system has better accuracy, flexibility, and repeatability in performing minimally invasive surgery. The introduction of MRI-guided interventional robot system simplifies the complicated traditional operation process. The whole operation is carried out in the MRI equipment, which is beneficial to real-time positioning and monitoring of lesion location. Kaiser et al. 33 developed the first MRI-guided interactive surgical robot for breast intervention. Since then, many research groups and teams have conducted research on MRI-guided breast intervention robots. Regarding the fluidity of breast tissue, the research and development of MRI-guided breast stabilization devices has also made some progress.54–60 Figure 3 shows several MRI-guided breast stabilization devices.
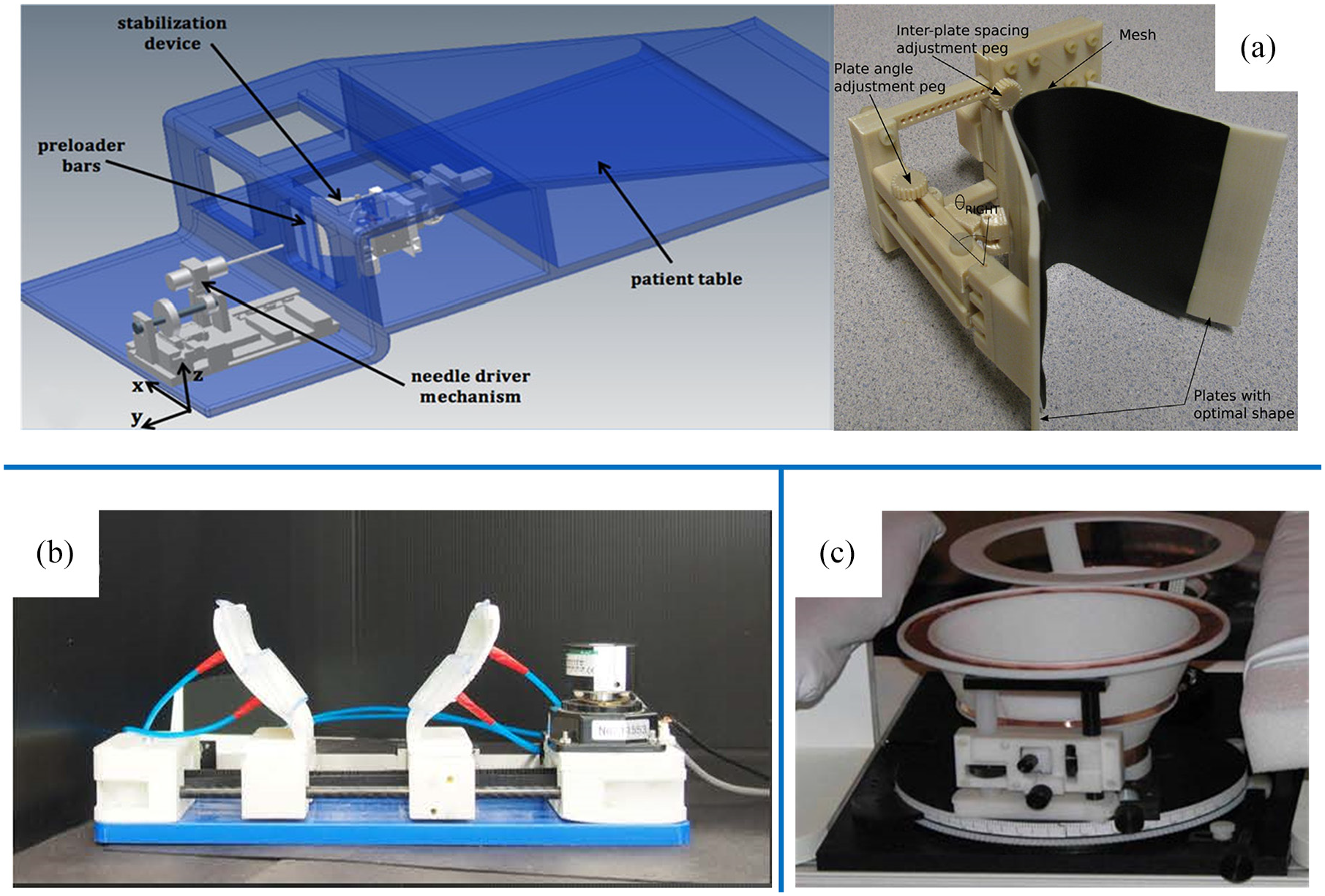
Several typical breast stabilization devices: (a) MRI-guided pneumatic stabilization device for breast biopsy (The device is comprised of two pneumatically actuated support plates. It would stabilize the biopsy target movements during needle insertion.)54,55 (b) MRI-guided breast stabilization device (The mechanism is actuated by a piezoelectric motor and multiple pneumatic bladders. The developed system is MRI-compatible.) 56 (c) The stabilization device for biopsy and treatment equipment (This device has six degrees of freedom. When the device and patient are in the scanner hole, its movement and probe insertion are remotely controlled.) 57
MR-guided breast intervention robot technology and principle
Material
The materials and components used in the MRI environment must be MRI compatible. The use of magnetic and conductive materials affects the imaging quality and cannot guarantee the safety of doctors and patients.
Influence of magnetic materials
MRI equipment has a uniform main magnetic field. If ferromagnetic and paramagnetic materials are near the imaging equipment, the uniformity of the main magnetic field will be affected, resulting in image distortion and artifacts. On the other hand, magnetic resonance equipment has strong magnetism, and the magnetic field produces a strong attraction to the magnetic materials inside. Therefore, intervention robots containing magnetic materials and components in the MRI environment can generate higher force and torque, which can cause serious injury to doctors and patients.
Influence of conductive materials
The conductivity of materials is another major factor affecting the quality of MRI imaging. With the rapid change of the gradient magnetic field, the conductive equipment inside the MRI equipment generates induced electromotive force, which forms eddy current. Eddy current is essentially a current that decays with time. The magnetic field generated by the eddy current has a reaction to the original magnetic field, causing local magnetic field distortion and image distortion. Eddy currents also produce thermal effects and cause a series of safety issues. Currently, MRI-guided breast intervention robots use materials with good MRI compatibility, such as titanium alloy, copper, aluminum, high-strength plastic, and high-performance composite materials. The ideal MRI compatible material should have perfectly matched magnetic susceptibility and conductivity. In addition, the design of the breast intervention robot needs to have a certain degree of rigidity and strength, which is taken into consideration when selecting materials and components.
Sensor
The sensor is a very important detection element in the robot system and plays a key role in the feedback control. Most of the existing sensors cannot be used in MRI equipment. They work by converting the measured physical quantity into an electrical signal. The transmission of electrical signal interferes with magnetic resonance imaging. Few MRI-compatible sensors have been developed and applied, and they still interfere with MRI. Sensors used in breast intervention surgery robots have higher requirements for sensitivity and functionality. The sensors are mainly displacement sensors and force/torque sensors that work by transmission and conversion of the optical signal. The displacement sensor feeds back linear and angular displacement information so that the control system can adjust the robot’s pose in time. The optical encoder is the main displacement sensor used in MRI-guided breast intervention robots. The robot uses the optical encoder to obtain the error between the reference and actual puncture position. 37 Iranpanah et al. 54 developed a breast stabilization device that consists of two support plates. Two incremental optical encoders are used in the device to measure the angle of support plates. The resolution of the optical encoder is low, causing the joint tracking error not to converge. The encoder with high resolution can better ensure the puncture accuracy. Liu et al. 43 used an optical fiber encoder to obtain the angular displacement information of the robot’s rotational degrees of freedom. The data is transmitted to the control system, which contributes to the error compensation. In breast intervention robot, it is very important to control the needle-tissue force. Doctors monitor the operation in real time through the feedback information provided by force/torque sensors. Yang et al. 35 and Tan et al. 61 developed an MRI-compatible fiber optic force sensor, which can calculate the needle-tissue force by sensing the intensity of the reflected light signal. The calculated value can reflect the degree of deformation of the breast tissue.
Actuation
Limited by the high-intensity magnetic field, the actuation of the MRI-guided breast intervention robot cannot use the traditional electromagnetic induction motor. We not only consider the output power and transmitted torque of the driver, but also MRI compatibility. 62 We summarize the driving methods of MRI-guided breast intervention robots that have been developed, which are mainly divided into four driving methods, piezo-ultrasonic actuation, pneumatic actuation, hydraulic actuation, and electromagnetic actuation see Figure 4 for several typical driving modes of breast intervention robot.

Several typical driving modes of breast intervention robot: (a) double tendon-sheath transmission device for MRI-guided breast intervention robots, 37 (b) cable transmission for MRI-guided breast intervention robots, 42 (c) sectional view and principle of pneumatic motor, 25 (d) pneumatic actuation, 66 (e) hydraulic actuation, 21 and (f) the electromagnetic motor. 46
Piezo-ultrasonic actuation
Piezo-ultrasonic actuation has been widely used in various medical devices, especially for the development of MRI equipment. The motor is made of non-magnetic piezoelectric ceramic material. The inverse piezoelectric characteristics and mechanical vibration are used for energy conversion. The motor has good MRI safety and compatibility. 63 The working principle will not produce electromagnetic interference and noise. Breast interventional surgery has high requirements for puncture accuracy. Piezo-ultrasonic actuation provides excellent control accuracy for breast intervention robots, achieves precise puncture and improves surgical results. However, the motor housing contains magnetic materials, which can still cause image distortion. To solve this problem, the existing breast intervention robots mostly use piezo-ultrasonic actuation for long-distance transmission. The motor is usually placed at a distance of about one meter from the device, that is, the isometric distance of magnet. 34
There are many transmission methods for piezo-ultrasonic actuation. Cable transmission and tendon transmission are the most commonly used transmission methods. The cable transmission is a commonly used transmission method for medical robots. It has good performance and good weight-length ratio, which can reduce the motion inertia and make the operation process more stable. Zhang et al. 42 designed an MRI-guided breast intervention robot system, which uses a remote drive mode of cable transmission. Because the piezo-ultrasonic actuation is placed outside the MRI equipment, the robot structure can be designed more compact, which helps the robot to adapt to the narrow workspace. An MRI-guided breast biopsy robot was introduced by Liu et al. 43 The robot is designed as a 3-DOF compact robot, which is driven by piezo-ultrasonic motor through cable transmission. In the research on the transmission method of minimally invasive surgical robots, the tendon transmission gets more attention. Jiang et al. 37 developed a 5-DOF high-precision robotic system with tendon transmission for breast intervention. In the transmission process, the accuracy of the piezo-ultrasonic actuation will be affected by friction and many other factors. Do et al. 64 propose a new dynamic friction model and backlash hysteresis nonlinearity for a pair of TSM to deal with these problems. Qi et al. 65 establish a modified capstan equation including bending rigidity and nonlinear friction to analyze the transmission characteristics of a cable-pulley system. The influence of transmission friction loss on the surgery precision has always been a problem that scholars are committed to research and improvement. Another limitation is that piezo-ultrasonic motors are expensive and difficult to obtain, which increases the cost of surgery.
Pneumatic actuation
In addition to the piezo-ultrasonic actuation, the pneumatic actuation is another driving method frequently used in breast intervention robots. The pneumatic actuation uses compressed air as the transmission medium. The pressure energy is converted into mechanical energy to drive the robot. The medium viscosity is very small, so the transmission process is less affected by resistance. It is not easy to produce transmission loss. The pneumatic actuation has good MR compatibility and transmission accuracy, so it has more applications. Groenhuis et al. 25 developed a linear pneumatic stepping motor, which can be controlled relatively by using a standard pneumatic valve manifold. It does not need a position feedback system. The motor is miniaturized to be installed in a 45 mm spherical joint. A more compact 5-DOF Stormram 2 robot is built on the basis of the joint. A 5-DOF pneumatic puncture robot is designed by Zhao et al. 66 Most breast intervention robots use pneumatic actuation with the remote transmission. The long transmission process affects the force and torque output to the actuator. Pneumatic actuation is a driving method which is very suitable for the MRI environment. It is an important task to improve transmission mode in the future.
Hydraulic actuation
Both hydraulic actuation and pneumatic actuation belong to fluid driving. And the working principle of hydraulic actuation is similar to that of pneumatic actuation. Hydraulic transmission has many advantages, such as smooth transmission, easy control, overload protection, and not being affected by magnetic fields, The application of hydraulic actuation in MRI-guided breast intervention robots is less than that of piezo-ultrasonic actuation and pneumatic actuation. The flow resistance and friction loss generated during the transmission process are relatively large, mainly because the transmission medium is liquid and has relatively high viscosity. It is easy to cause the insertion direction of the end-effector to deviate. Lister et al. 21 designed a breast RFA robot with tactile feedback function, which is a 1-DOF needle driver. The robot adopts hydraulic actuation. However, due to liquid leakage, cavitation, and other factors, experimental results are not ideal. At present, the application of hydraulic actuation in breast intervention robot is still under further development. The leakage of hydraulic oil, friction loss and many other issues still need to be considered. Sakaino et al. 67 propose an EHA model that reflects oil leakage and static friction. To eliminate the necessity for complicated leak identification, oil leakage is estimated using two encoders. Then, the effect of static friction is suppressed using feedback modulators (FMs). Whitney et al. 68 presented a unique fluid-based transmission using pre-loaded antagonist rolling-diaphragm cylinders. Rolling diaphragm-sealed cylinders provide leak-free operation without the stiction of a traditional sliding seal.
Electromagnetic actuation
Traditional electromagnetic induction motors are not allowed to be placed near MRI equipment, because it will affect image quality and it is very dangerous for strong magnetic equipment to be placed in MRI environment. In MRI environment, electromagnetic induction motor is connected to the robots through the driving shaft and transmission line. Zhang et al.38,69 discussed and analyzed the transmission methods of several MRI-guided breast intervention robots, and finally selected electromagnetic motors for long-distance transmission. The non-magnetic structure and the 7-DOF compact Cartesian mechanism make it safe to run in the MRI scanner. Lu et al. 44 use electromagnetic motors as the driving method. The motion control experiment is carried out, and the robot positioning error is 0.37 mm. Although this method can ensure safe operation, the long-distance transmission increases the transmission time, reduces the transmission efficiency and affects the accuracy of operation.
Electromagnetic actuation is a cost-effective and important driving method in the research of minimally invasive robots. However, the actuation is relatively less used because of the poor MRI compatibility. Table 2 shows the comparison of driving methods.
Comparison of driving methods.

Introduction to ultrasound-guided breast intervention robot
Ultrasound imaging is a non-invasive, harmless, convenient, and intuitive medical imaging method with good real-time imaging capabilities and cost-effectiveness, see Figure 5 for several typical ultrasound guided breast intervention robots. 70 The working principle of ultrasound imaging is that the ultrasonic sound beam is reflected in the human body to obtain medical image signals. The imaging system obtains medical images of human tissues and organs by receiving and processing the signals. Till today, ultrasound imaging is still widely used in clinical diagnosis and has high value for disease prevention, diagnosis, and treatment. Due to the special structural characteristics of breast tissue, breast interventional surgery must cooperate with imaging methods that can realize precise guided puncture. Ultrasound has superior real-time imaging capabilities, which provides a foundation for the extensive application of interventional ultrasound technology in breast pathological diagnosis and treatment.

Several typical ultrasound-guided breast intervention robots: (a) the tip part of the needle insertion manipulator; experimental setup of in vitro experiment, 96 (b) robotic image-guided breast intervention system (1. Manipulation mechanism; 2. US image acquisition system; 3. needle guidance system), 78 (c) experimental setup (The setup uses the hybrid control architecture to coordinate real-time tumor operations and ultrasound imaging.), 77 (d) image-guided breast intervention robot system, 97 and (e) the needle device (A laser sensor on the device measures the needle position.) 83
Traditional ultrasound-guided breast surgery is performed by doctors manually. The doctor judges the insertion angle and distance based on the image information detected by the ultrasound probe and years of surgical experience. During the operation, the doctor needs to restrict the fluidity of breast tissue, adjust and insert the puncture needle, and continuously observe the ultrasound imaging display. If the target point is not in the ultrasound imaging plane, the doctor needs to manually adjust the probe’s position until the target point returns to the plane. 71 The fatigue caused by repeated operations for a long time leads to the doctor’s hand vibration, which will make the puncture path deviate and reduce operation quality. In addition, breast tissue is soft, uneven, and easily deformed. Traditional methods rely too much on doctors’ clinical experience and skills. The repeatability of the operation is low, the process is time-consuming, and it is difficult to ensure the accuracy of the operation.
The robotic system can accurately track and manipulate the ultrasound probe and end-effector, 72 so robotic surgery is the most ideal way for ultrasound-guided interventional surgery. In the past few decades, robotic systems have been integrated with ultrasound imaging technology, 73 which has greatly facilitated breast cancer discovery and treatment. The ultrasound-guided breast intervention robots perform minimally invasive surgery, which has little side effects during and after the operation. It is a very good treatment method. HIFU robot is a non-invasive treatment method. And it is another promising tumor treatment technology. 74 However, this method has some disadvantages such as skin burns, long treatment time, and incomplete ablation. It is better to treat smaller tumors with HIFU robots. Minimally invasive surgery is better for large tumors, because it is a radical operation. On the other hand, the HIFU robot system does not have an instrument or device to detect the change of body temperature in real time. Generally, the HIFU treatment equipment only uses ultrasound for image guidance. 75 Nuclear magnetic guidance is available, but not real-time. At present, researchers have done more research on ultrasound-guided breast intervention robots. Huang et al. 71 developed a robotic system for breast biopsy and treatment. Mallapragada et al.19,76–80 proposed an ultrasound-guided robot system and developed the novel sensorless contact detection technology and the hybrid control method. The robot system can control the tumor position in real time. The control system coordinates the ultrasound imaging system and the robot system in an effective way. Chen et al. 81 and Zhao et al. 82 designed a preloading technique to control the tumor position in real time. Welleweerd et al. 83 designed an ultrasound-guided end-effector. The system is used for three-dimensional ultrasound image acquisition and needle biopsy of breast tissue. Tanaiutchawoot et al.84–86 developed a breast biopsy navigation system that includes an optical tracking system and a passive robotic needle holder. And they developed its path generation algorithm and graphical user interface. Nowadays, scholars are more popular to study MRI-guided breast intervention robots. Although ultrasound is inferior to MRI in image detection capabilities. Its characteristics, such as, rapid imaging, real-time, and easy to popularize, make it an irreplaceable imaging method for breast tissue.
Nowadays, automatic breast ultrasound technology is more and more used in robot and image technology, which is a very promising development direction in the future. Automated breast ultrasound (ABUS) plays an important role in the clinical diagnosis of breast cancer. 87 Combined with the robot, it will be easier for breast interventional therapy. High frequency sensors are used to provide a large field of view and produce high-resolution images, which can cover most of the breasts in one scan. Computer aided testing software greatly shortens the interpretation time and improves the work efficiency and quality accuracy of ABUS. ABUS has an important influence on the detectability of breast lesions and the differentiation of benign and malignant lesions. Many companies and institutions develop ABUS devices, such as the Siemens Acuson S2000, GE Invenia, and the iVu Sofia ATUS system.88,89 Future prospects include the integration of radiomics and deep learning in the further development of ABUS. 90
Introduction to CT-guided breast intervention robot
CT has high application value in tumor diagnosis and has been widely used in clinical. CT scans the cross-sectional anatomy and can accurately detect small differences in the density of different tissues. CT has the high-density resolution, so soft tissue imaging is clear. And it is good for imaging of overlapping tissues. However, CT imaging equipment produces a large amount of radiation, which is not good for doctors’ health. The robot system is not affected by radiation, so it is more suitable for working in a CT environment. Masamune et al. 91 introduced a prototype of an image-guided robot system, including a 7-DOF passive installation arm, a remote motion center robot and an electric needle-insertion device. The system can accurately insert percutaneous needles into the target point under CT guidance. In order to achieve remote robotic interventional surgery, Kim et al. 92 proposed a 2-DOF compact and light end-effector. The needle actuator is CT compatible and easy to sterilize. Bricault et al. 93 and Zemiti et al. 94 introduced a new robotic system designed to perform abdominal and thoracic punctures under CT or MRI guidance. They developed corresponding segmentation and registration algorithms to position the robot on images from CT or MRI equipment for this system. Specific control loops are used to verify the motion and position of the robot. Based on the LPR robot designed by Zemiti et al., Hungr et al. 95 proposed an MRI and CT compatible interventional radiology robot that can be installed on the patient.
CT imaging equipment is more expensive, and the amount of radiation is much higher than that of ordinary X-ray. 98 Therefore, it should be used reasonably on the basis of understanding its characteristics.
Image guided positioning technology
MRI
MRI is the three-dimensional imaging technology that provides rich medical imaging information for breast interventional surgery. MRI can outline the boundary of the tissue more accurately. Through image acquisition and three-dimensional reconstruction, the breast tissue is projected into the virtual environment, so that doctors can have a clear concept of the spatial location of the lesions.
The lesion location is unclear and the puncture path deviates, which leads to incomplete removal of lesion tissue and secondary disease. Before the operation, the image was collected to determine the lesion location, and the MRI visible markers were marked on the target points. The image segmentation, reconstruction, and physical space registration are performed. 99 The real-time dynamic update of intraoperative MRI can track the target point, which is beneficial to correct the puncture path in time.
Yang et al.36,100 developed an MRI compatible master-slave surgical system. The system identifies the target point and the insertion point through continuous MRI and establishes a feasible trajectory to guide the puncture needle to the target point accurately. The navigation system is designed by Park et al. 40 They use C++ language to develop visualization and control software. The visualization software shows the projection path of the needle incision. The feedback control loop and control algorithm are set up to reduce the error. The current system is independent of the MRI control workstation. Therefore, this method cannot achieve real-time tracking. Groenhuis et al. 26 used an algorithm based on geometric correction and binary scanning to extract reference points. After further processing the constructed tree diagram, the puncture needle can be identified based on the relatively constant cross-sectional area shape. Chan et al. 39 proposed an IGAR robot that can plan the puncture path and accurately guide the end-effector.
US
The ultrasound probe must be in close contact with the skin surface, otherwise, it is difficult to ensure acoustic coupling. If the lesion position moves out of the imaging plane, imaging will not be possible. In addition, the morphology of the breast tissue is prone to change, which is not conducive to image acquisition and registration. In order to better detect the edge area close to the image, Mallapragada et al. 78 used the Otsu method to estimate the image gray threshold. The change of the threshold value reflects the contact state of the ultrasound probe with the skin surface. They designed a positioning ultrasonic detection system and robust image acquisition technology. In this technique, the target is automatically searched and recovered by means of strong search strategy. 79 Nelson et al. 97 developed a volumetric breast ultrasound scanner. In order to reduce speckle and improve the definition of the lesion boundary, horizontal scanning is used to obtain high-quality images with spatial composite.
The ordinary ultrasound imaging is the two-dimensional image. It is difficult to measure the target position truly and stably. 84 The obtained coordinate parameters cannot reflect the space problem well. The three-dimensional image is established based on two-dimensional ultrasound imaging, which can image any cross section. Liang et al.101,102 analyzed the feasibility of three-dimensional and four-dimensional ultrasound-guided breast biopsy robot. Poulin et al. 103 verified 3D ultrasound-guided robot system. The ultrasonic probe operated by the robot can produce accurate 3D ultrasonic volume reconstruction. Welleweerd et al. 104 used ultrasonic transducer to track the target point, and input tracking parameters into the SAIP control algorithm to drive the robot. The visual servo algorithm corrects the contact position of the probe according to the confidence map. Ayob et al. 105 established a mathematical model with the idea of expressing breast characteristics and proposed a trajectory algorithm that can be used for breast biopsy under the guidance of 3D ultrasound.
In addition, one of the reasons why scholars prefer to study MRI is that ultrasound images are difficult to distinguish between dense tissues and tumors. However, ABUS technology based on deep learning is currently a very cutting-edge field. Yap et al. 106 propose an end-to-end deep learning method for breast ultrasound lesion recognition. The use of ultrasound imaging to detect breast lesions is considered to be an important step in a computer-aided diagnosis system. 107 ABUS can combine deep learning and convolutional neural network (CNN) to distinguish benign and malignant breast masses. 108 Vakanski et al. 109 proposed a breast tumor segmentation method in ultrasound images that combines visual saliency and deep learning models. Yap et al. 110 proposed a method for breast ultrasound lesion detection using deep learning methods, and studied three different methods: LeNet based on patch, U-Net, and transfer learning method with pre-trained FCN-Net.
CT
CT is an image-guided method with outstanding advantages. It has developed into a mature image guidance technology. The tomographic images generated by CT can better assist in locating target points and planning the puncture path. A 6-DOF automatic robots was designed by Yanof et al. 111 Doctors can interactively formulate the path in the pre-scanned image space. The information is sent to the robot controller. The needle holder moves along a collision-free trajectory and stops at a position proportional to the planned insertion position and angle. The robot cooperates with the scanner to realize automatic registration. Taillant et al. 112 introduced a novel light robot architecture for puncture. The system performs interventional CT/MRI procedures. And they developed a new method to locate robots by using only one slice containing frame and Delrin strip.
CT scanning time is fast, imaging is clear, and soft tissue resolution is relatively good. There are not many CT applications in breast intervention robots at present, and this research has great room for development.
Image positioning guidance technology is a combination of medical imaging technology, artificial intelligence, computer technology, and other multiple technologies to classify, predict, or locate the focus of the disease. The application of medical imaging technology has significantly improved the level of early diagnosis of breast cancer. With the application of artificial intelligence (AI) in the medical field, researchers have turned their attention to designing efficient intelligent computer-aided detection and diagnosis systems, using image processing and computer vision (CV) technology to predict the prognosis of breast diseases.113,114 Otherwise, the research of machine learning and deep learning algorithm models will better assist breast intervention robots in the future.
Conclusions and future trends
Medical robots have been a hotspot in the research field of robotics in recent years. With the integrated development of robotics and clinical surgery, standardized intelligent medical equipment is widely used in clinical examination and treatment. As a new type of minimally invasive surgery equipment, breast intervention robot needs to be improved in its operation mode and performance. Most breast intervention robots are still in the research phase and have not actually been applied to clinical treatment. The selection of image-guided method is the key to determining the lesion location and planning the puncture path. Image-guided technology plays a vital role in preoperative treatment planning and intraoperative real-time guidance. MRI is the most important image guidance method for breast intervention robots, but there are still many problems in the development of robot systems under the MRI environment. In the strong magnetic environment, the application of materials, sensors, and actuations are greatly restricted. The current solution is to select and develop MRI-compatible materials and components. The research of sensors is very important to achieve precise control of robots. Fiber optic sensors have superior MRI-compatibility and are widely used in breast intervention robots currently being studied. The main driving methods of MRI-guided breast intervention robots are piezo-ultrasonic actuation, fluid actuation, and electromagnetic motor actuation. Among them, piezo-ultrasonic actuation and pneumatic actuation are the main driving methods used in the robot. In the past few decades, the combination of robotics and ultrasound technology has promoted the development of diagnosis and treatment of breast diseases. The stable probe manipulators and needle guidance devices have always been the focus of research. The diseased tissue out of the imaging plane and the doctor’s hand tremor will reduce the sampling quality. The ultrasound-guided breast intervention robot can avoid sampling errors through precise tracking and control. In addition to MRI and ultrasound, CT is another important guidance method for minimally invasive robots. CT has excellent imaging characteristics. However, radiation can still harm patients.
In the future, breast intervention robots will develop in a more minimally invasive, intelligent, and precise direction. A more compact and flexible breast intervention robot is designed to meet the needs of surgery. The existing device provides technical reference for future research and development. Precise positioning of the diseased tissue and reasonable path planning are the keys to surgery. It is necessary to improve the integration of image navigation system and breast intervention robot system, so as to improve the efficiency and quality of breast surgery effectively. It has become an inevitable trend to promote efficient integration between systems, and finally realize the coordinated development of man-machine thinking.
Footnotes
Handling editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Reserve Leader Funding Project of Leading Talent Echelon of Heilongjiang Province of China (Grant No. 2501050628).