
Abstract
Ankle push-off is defined as the phase in which muscle-tendon units about the ankle joint generate a burst of positive power during the step-to-step transition in human walking. The dynamic walking of a biped robot can be effectively realized through ankle push-off. However, how to use ankle push-off to balance the walking speed and energy efficiency of biped robots has not been studied deeply. In this study, the effects of the step length (the inter-leg angle is 40°, 50°, and 60°), torque and timing of ankle push-off on the walking speed and energy efficiency of biped robots were studied. The results show that when the step length is 50°, the push-off torque is 30 N· m and the corresponding push-off timing occurs at 43% of the gait cycle, the simulated robot obtains a highly economical walking gait. The corresponding maximum normalized walking speed is 0.40, and the minimum mechanical cost of transport is 2.25. To acquire a more economical walking gait of biped robots, the amount of ankle push-off and the push-off timing need to be coordinated. The purpose of this study is to provide a reference for the influence of ankle push-off on the motion performance of biped robots.
Keywords
Introduction
Quasi-statically stable walking
The walking speed and energy efficiency are important criteria to evaluate the versatility and economy of biped robots. For fully actuated biped robots, the zero moment point (ZMP) theory is usually used as the standard of stability control,1,2 and it maintains the center of pressure of the ground reaction forces on the stance foot strictly within the convex hull of the foot. 3 For example, one of the most representative biped robots is the Honda ASIMO, 4 which can realize complex movements such as walking, running and climbing stairs. In addition, HRP-2 and Johnnie are also included among the highly visible humanoids.5–7 However, their walking gaits are quite different from human dynamic walking, termed quasi-static walking. 3 The energy efficiency of the walking gait is usually quantified by the energetic cost of transport (COT), defined as the energy consumed to move a unit weight a unit distance. 8 The COT value of an adult human is approximately 0.20 during normal walking, 8 while the COT of the Honda ASIMO is approximately 3.2, 9 which is more than ten times that of normal human walking. Therefore, many researchers have attempted to improve the energy efficiency and dynamic walking characteristics of biped robots.
Dynamic walking
In 1990, McGeer proposed a new design and control scheme, namely, the passive-dynamic walker. 10 Compared with the mainstream fully actuated biped robots, which actively control the joints at every moment, the joints of passive-dynamic walkers are not controlled at any time. This kind of walker can realize humanlike gaits on a slope by gravity.3,9 Cornell University’s completely passive 3D biped robot was the closest to the human walking gait at that time. 11
Since passive-dynamic walkers can only walk on slopes and cannot change the walking speed, further application is limited. Therefore, researchers have attempted to study passive-dynamic walkers suitable for walking on flat ground. The new passive-dynamic walkers use simple actuation instead of gravity and can walk on level ground. The representative walker is the Cornell biped, weighing 13 kg. It is powered by electric motors with springs that drive ankle push-off. 9 The research results show that the COT is approximately 0.2 at a walking speed of 0.4 m/s, which is very close to that of humans. 9 In addition, a passive dynamic biped robot, named Denise, designed by Delft University of Technology uses pneumatic muscles to drive the hip joint. The knee joint is locked in the stance period and unlocked in the swing period. The ankle joint is completely passive. This robot can obtain an average walking speed of 0.47 m/s and a mechanical cost of transport Cmt of approximately 0.08.9,12 Both biped robots have proven that ankle push-off can effectively power the swinging leg, and this phenomenon also exists in human walking. However, in contrast to the normal walking speed of humans, the speed of these two biped robots is only half that of humans, and the speed cannot be changed within a certain range. This is because the Cornell biped walker only relies on the ankle joint to provide energy. Denise’s ankle joint is passively actuated. In addition, the passive knee joint also limits the walking speed of Denise.
Biped robots with ankle push-off
Humans can walk with low energy consumption and high performance, withstanding considerable disturbances and adopting a wide variety of different gaits. 13 They rely heavily on passive dynamics in walking and power the walking gait primarily through ankle push-off. 8 During normal walking, the vast majority (>85%) of the ankle push-off limb energy change contributes directly to the COM (the center of mass) energy change during push-off. 14 Ankle push-off mainly contributes to leg swing acceleration and COM acceleration.15,16 Therefore, researchers have attempted to improve the walking speed of biped robots using ankle push-off. In previous studies, the actuation modes of the ankle joint were divided into passive mode17,18 and active mode.13,19 Because the passive ankle joint cannot provide enough push-off thrust, the active ankle joint has become the main method to improve the walking speed. Kuo’s simulation analysis of a biped model indicated that the overall walking speed increases roughly with the square root of the push-off magnitude. 20
Hobbelen and Wisse 13 designed the planar biped robot Meta with hip and ankle joints actuated by electric motors. The effects of the amount of ankle push-off, upper body pitch and step length on the walking speed, energy efficiency and disturbance rejection were explored. The results show that the biped robot obtained walking speeds ranging from 0.24 to 0.68 m/s. Adjustment of the ankle push-off can change the walking speed of the robot. Studies usually quantify the walking speed as a dimensionless speed by the normalized Froude number. Meta’s normalized Fr changed from 0.1 to 0.28. Compared with the walking speed of humans (normalized Fr = 0.45), Meta’s speed is less than that of humans. Further speed increases are limited by the passive swing knee motion. In addition, ankle push-off starts when the leading leg lands and stops when the torque in the trailing ankle is zero in the prototype and simulation model of Meta. Kuo proposed that through ankle push-off with proper timing, considerable energy savings may be realized. At the proper time, push-off can reduce the velocity of the impact speed before the leading leg collides with the ground.8,21 Ankle push-off after leading leg impact has no obvious advantage over hip powering. 8 However, Meta’s ankle push-off occurs after the leading leg collision, which means that ankle push-off cannot be effectively used to improve the energy efficiency. Hereid et al. designed an underactuated 3D biped robot, DURUS, including 15 actuated degrees of freedom and two passive springs, which are fixed to and perpendicular to the bottom of each foot and reduce the energy loss during foot impact. The robot realized 3D flat foot walking and 2D heel-toe walking at speeds of 0.3 and 0.35 m/s, respectively, and the average energy consumption COT was 1.33. Compared with the COT of the humanoid biped robot ASIMO, the energy efficiency was significantly improved.19,22 However, the walking speed of DURUS is lower than that of humans.
How can ankle push-off be used to balance the walking speed and energy efficiency of the biped robot and to obtain a speed close to that of human walking? Humans choose a specific step size and frequency to obtain a specific walking speed with minimum metabolic energy consumption.23–25 Therefore, some researchers have tried to acquire inspiration and heuristics from human walking. Humans begin ankle push-off before heel strike of the leading leg, continuing positive work for the ankle even after heel strike and through most of the double support period. 26 Ankle push-off occurs at 45%–65% of the stride gait cycle at typical speeds,14,27 releasing more than 80% of the energy in a short period of time. Therefore, the ankle push-off generates a peak burst of positive power and presents a large explosive thrust. In summary, the torque amount and timing of ankle push-off are very important to improve the human walking speed and energy efficiency.
Ankle push-off includes two variables: the torque and timing of push-off. The step length is an important factor affecting the walking speed of the robot. Thus, the purpose of this study is to explore the influence of the step length, torque and timing of push-off on the walking speed and energy efficiency of biped robots and then to determine whether there is an optimal combination of torque and timing of push-off such that the biped robot can obtain a specific walking speed with the minimum energy consumption under a specific step length similar to humans. Therefore, the parameters that affect the walking speed and energy efficiency in this study are as follows: step length (inter-leg angle), push-off torque, and push-off timing (that is, push-off height).
This paper is organized as follows. Section 2 introduces the simulated robot model and controller framework. Section 3 introduces the calculation method for the performance criterion. The simulation results are described in section 4. A discussion and the conclusion of the results in this study are given in sections 5 and 6, respectively.
Methods
Model
In this study, a 2D biped robot is used as the simulation model. The biped robot has six degrees of freedom and includes a torso and two legs. The parameters of the mass distribution of the simulation model are shown in Table 1. To constrain the simulated robot in the sagittal plane, three degrees of freedom (one revolute and two prismatic) are added between the torso and the simulation environment. 28 Contact force and friction force are generated between the foot and ground by using the sphere-to-plane contact force module in MATLAB/Simscape. As shown in Figure 1, the black line indicates the trailing leg, and the gray line indicates the leading leg. The inter-leg angle θ determines the step length. 13 To describe the step length more intuitively, we will use the inter-leg angle to replace the step length. The hip and knee joints are actively actuated, and the ankle joint is actuated by the specific state machine. The torque magnitude and timing of the ankle push-off are determined by the specific state machine. When the ground reaction force of the trailing leg is greater than zero and the push-off height of the ankle joint of the swinging leg meets the condition of the specific state machine, ankle push-off begins, as shown in Figure 1(a). Then, the push-off torque of the state machine is applied to the ankle joint. When the ankle angle of the leading leg is greater than 20º, the torque of push-off becomes zero, as shown in Figure 1(b).
Parameter values of the simulation model.


Push-off height and push-off timing: (a) push-off begins and (b) push-off ends.
Controller
The walking robot is an event-driven dynamic system with intermittent discrete and continuous states.3,29 As in human walking, the hip and knee joints of the simulated robot have two movement states, flexion and extension. 17 The extension and flexion directions of the joints are shown in Figure 1(b). The state machine of hip and knee joints is shown in Figure 2, which is used to switch between movement states. 17 When the contralateral ground reaction force is greater than zero, the hip joint changes from flexion to extension, and the knee joint changes from extension to flexion and then to extension. The ipsilateral ground reaction force changes the state of the hip to extension.

State machine of hip and knee joints (adapted from Geng 17 ).
The controller diagram of the simulated robot is shown in Figure 3. The trajectories of hip and knee joints are planned using quintic polynomial curves. The motion range of hip joint flexion is from −θ/2 to θ/2, and the motion time is 0.5 s. The motion range of the knee joint is from 0 to φ, and the motion time is 0.25 s. The actual joint positions of the simulated robot are obtained using the transform sensor module in MATLAB/Simscape, and the motion of hip and knee joints is controlled by the PID controller according to the deviation between the planned desired position and the actual position of the joint. The state machine of the ankle push-off torque is used to control the torque curve of the ankle joint, as shown in Figure 3. The height of the ankle joint, hip position and ground reaction force are used to determine the beginning and ending timing of push-off. When the ankle angle is greater than 20º, the push-off ends, and the torque of the ankle joint becomes zero. After push-off, the ankle joint soon enters the swing period. To prevent the foot from scuffing the ground, the torque of the ankle joint uses the state machine of the swing phase, as shown in Figure 3. When the hip joint is in the range of −0.6θ to −0.4θ and the ground reaction force is greater than zero, the torque of the ankle joint is −15 N· m, and the foot starts to change from plantar flexion to dorsiflexion. When the ankle angle is less than −15º and the hip angle is less than 7º, the ankle torque changes from −15 to 5 N· m. When the ankle angle is greater than or equal to −10º and the hip angle is less than 7º, the ankle torque changes from 5 to −15 N· m. When the hip angle is greater than or equal to 7º, the ankle torque changes from −15 to 5 N· m. When the hip angle is in the range of 0.4θ–0.7θ and the ankle angle is greater than 5º, the ankle torque becomes zero. In brief, the ankle joint is actuated using a combination of passive and active actuation.
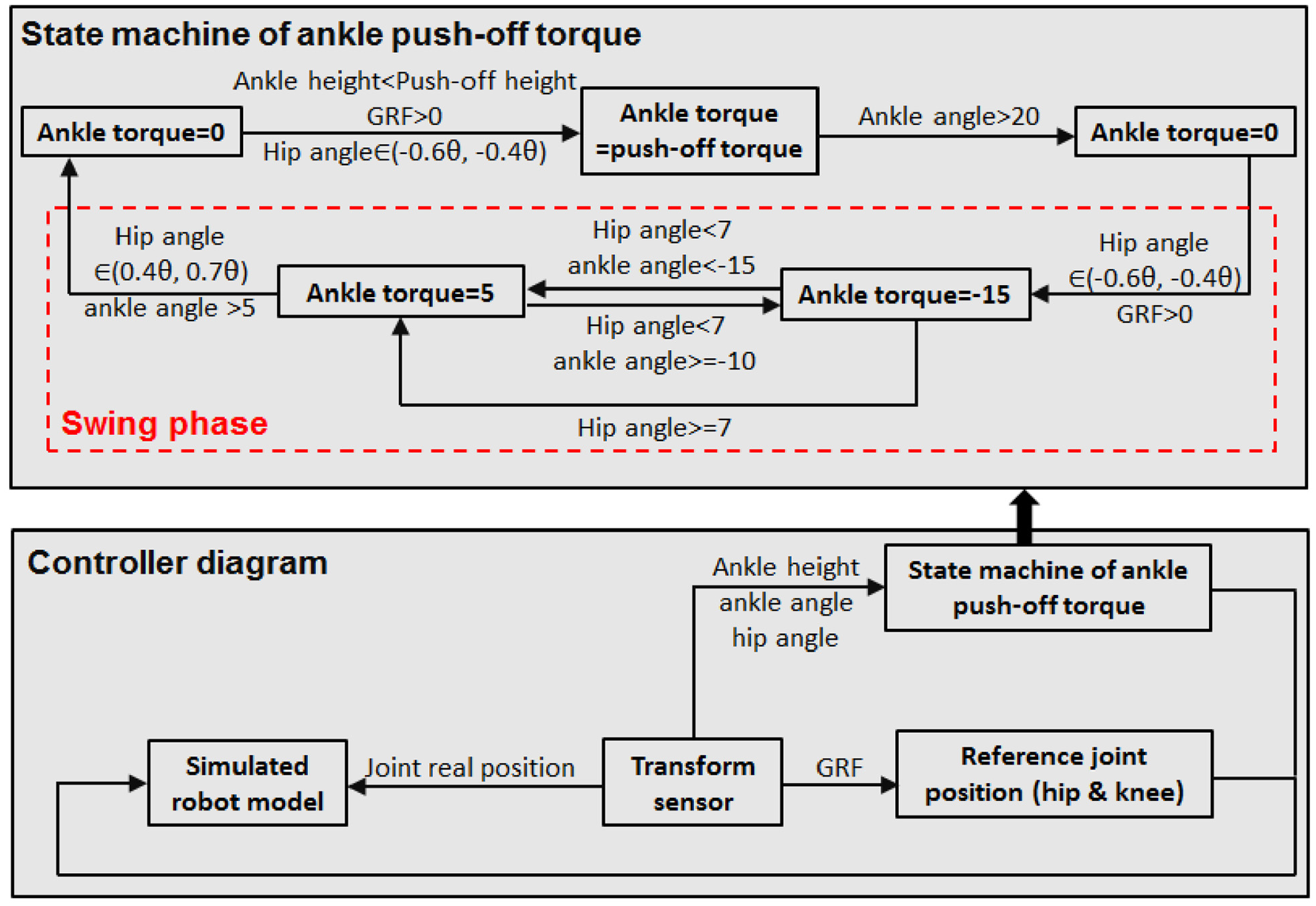
Controller diagram.
Performance criteria
To quantify the influence of the torque and timing of ankle push-off on the motion performance of the biped robot, the walking speed and mechanical cost of transport were taken as evaluation indexes in this study. Ankle push-off corresponds to the stage in which the output power of the ankle joint is positive at the end of the stance phase in human walking. 15 Therefore, the timing of ankle push-off is the moment when the output power of the ankle joint is positive in humans. Thus, the timing of ankle push-off for the simulated robot is the moment when the ankle torque starts to increase from zero. The push-off height is related to the push-off timing. The higher the push-off height is, the earlier the push-off timing. In addition, to study whether the dynamic characteristics of the biped robot are similar to those of humans, the Froude number was used as an evaluation index of dynamical similarity. 30
Normalized walking speed
Normalization with the square root of the leg length ensures that walkers of different heights can be compared fairly. 13 In this study, we quantify the walking speed as a dimensionless speed by the normalized Froude number, that is normalized walking speed:

Here, v is the walking speed, g is the acceleration of gravity, and l is the leg length.
Mechanical cost of transport
The energy use of a walking gait is quantified by the specific cost of transport. This dimensionless number gives the amount of energy that the biped uses per distance traveled per weight of the walker. In this study, the amount of energy used by a walker can be defined as the mechanical energy. 13 Thus, the mechanical cost of transport cmt is calculated by:

where T is the movement time of the robot,
Dynamical similarity
The Froude number (Fr) has been used to describe the dynamical similarity of legged locomotion over a wide range of animal sizes and speeds on earth. 29

Results
The solver ode23 in MATLAB/Simulink was used to analyze the simulation model. The control frequency of the simulation experiment is 500 Hz and the fixed step is 2 ms. The joint angle q, joint torque
Walking speed and mechanical cost of transport
For inter-leg angles θ (that is, step lengths) of 40°, 50°, and 60°, the normalized walking speed and mechanical cost of transport of the robot at different torques and heights of push-off are shown in Figure 4. When the inter-leg angle is 50° and 60°, the normalized walking speed increases with increasing height and torque of push-off, but the mechanical cost of transport does not change significantly. When the inter-leg angle is 40° and the push-off torque is 20 and 21 N· m, the normalized walking speed increases suddenly with increasing push-off height, which is caused by the advance of the push-off timing. Increasing the step length by increasing inter-leg angle θ increases the area of the steady-stable gait. When the inter-leg angle was 40°, 50°, and 60°, the torques and heights of push-off were recorded at two normalized walking speeds (V = 0.37 and 0.40), as shown in Table 2. When the inter-leg angle is 40° and the combination of ankle push-off is T21H12 (that is, the push-off torque is 21 N· m, the push-off height is 12 cm, and the corresponding push-off timing occurs at 33% of the gait cycle), the robot achieves a maximum speed of 1.17 m/s, a normalized speed of 0.37 and a mechanical cost of transport of 2.19. When the inter-leg angle is 50° and the push-off combinations are T30H20, T41H14, and T44H13, the maximum speed of the robot is 1.24 m/s, and the corresponding normalized speed is 0.40. When the inter-leg angle is 60° and the corresponding push-off combinations are T32H26, T33H24, T34H23, T35H22, T36H21, T37H20, T40 H18, T43H17, T46H16, T59H14, and T64H13, the maximum normalized speed is 0.40. When the inter-leg angle is 60°, the smallest mechanical cost of transport is 2.95, and the corresponding push-off combination is T32H26.
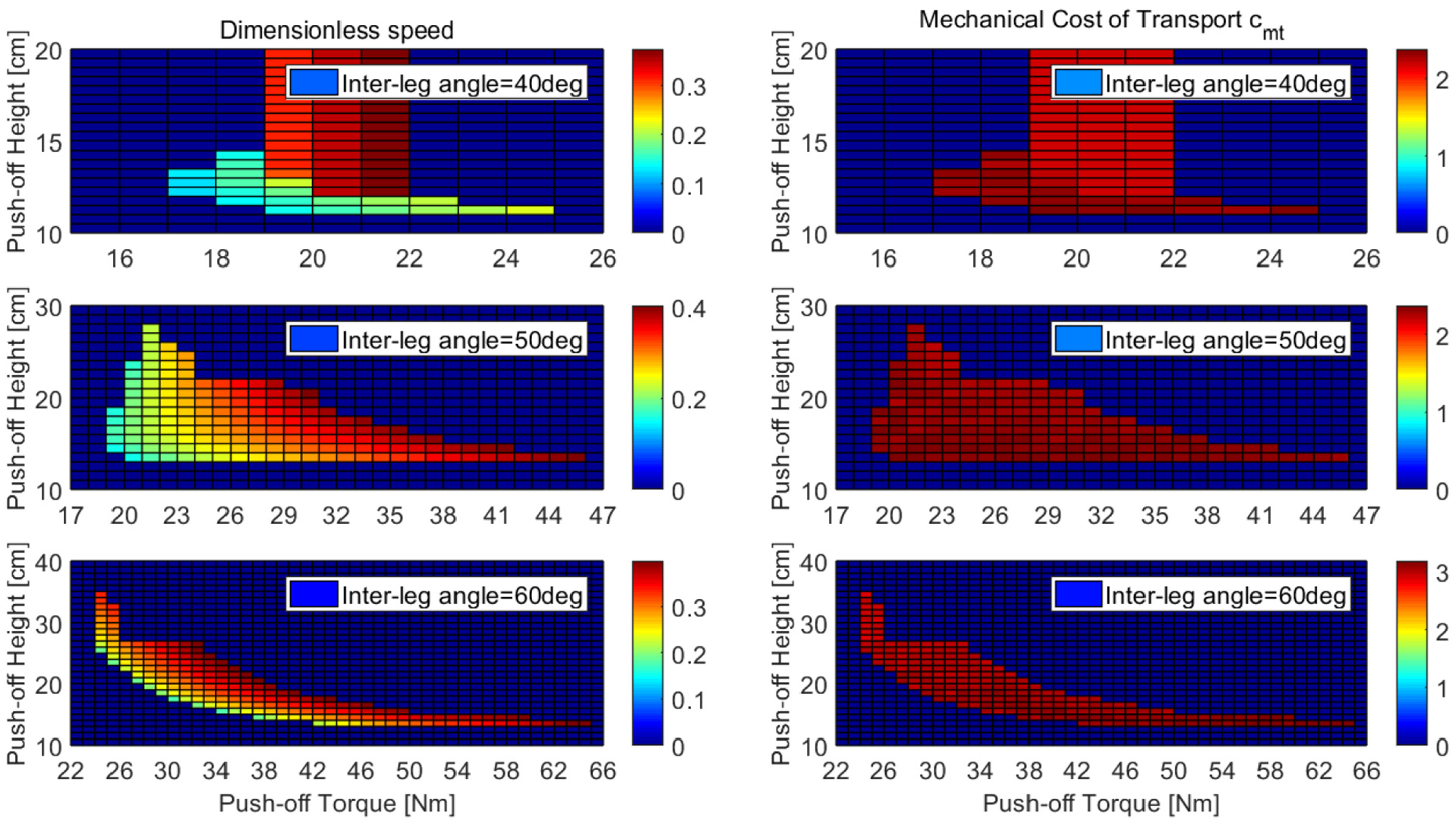
Normalized walking speed and mechanical cost of transport with variation of three actuation parameters: push-off torque, push-off height and inter-leg angle θ.
Combination of ankle push-off and mechanical cost of transport corresponding to the maximum normalized walking speed at different step lengths (θ = 40°, 50°, and 60°).

Effect of the step length
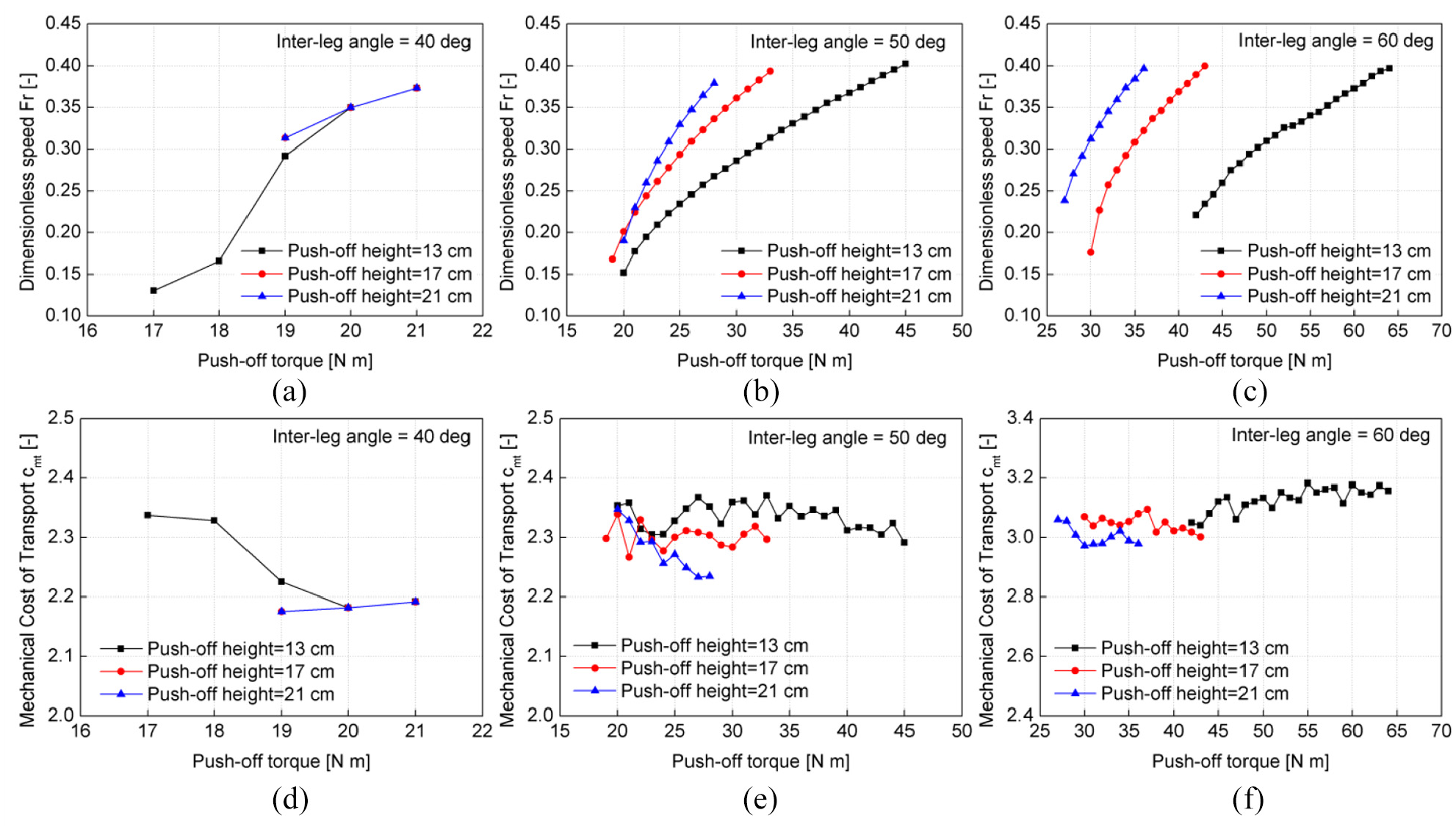
Figure 5 summarizes the walking speed and mechanical cost of transport at different step lengths (θ = 40°, 50°, and 60°). When the push-off height is 13, 17, and 21 cm, the walking speed increases with increasing push-off torque, and the variation range of normalized speed is 0.13–0.40. However, the change trend of the mechanical cost of transport is relatively stable with increasing push-off torque at equal push-off height. When the inter-leg angle (that is, step length) is 60°, the mechanical cost of transport is significantly greater than that at the other two step lengths, and the mechanical cost of transport increases with increasing step length at equal push-off height. 13 Therefore, it is not economical to obtain a specific speed using a larger step length.

Normalized walking speed at push-off height equals: (a) 13 cm, (b) 17 cm, (c) 21 cm, mechanical cost of transport at push-off height equals (d) 13 cm, (e) 17 cm, and (f) 21 cm.
Effect of the push-off height
The normalized speed and mechanical cost of transport at different push-off heights (H = 13, 17, and 21 cm) are presented in Figure 6. Increasing the push-off torque increases the walking speed. When the step length is 50° and the push-off torque is greater than 21 N· m, the speed increases with increasing push-off height at equal push-off torque, which also shows that advance of the push-off timing is helpful for improving the walking speed, as shown in Figure 6(b). When the step length is 60°, the push-off torque decreases with increasing push-off height at equal walking speed, as shown in Figure 6(c). The mechanical cost of transport decreases as the push-off height increases. At the same walking speed, when the push-off height is 13 cm, the mechanical cost of transport is the highest among the three push-off heights, indicating that if the push-off timing is too late, then the ankle joint needs a larger push-off torque to provide energy during the step-to-step transition, as shown in Figure 6(e). Therefore, coordination between the torque and timing of push-off may provide an economical gait for biped robots.
Normalized walking speed at inter-leg angle equals: (a) 40°, (b) 50°, (c) 60°, mechanical cost of transport at inter-leg angle equals (d) 40°, (e) 50°, and (f) 60°.
Comparison of push-off combinations
The plantarflexor muscles and tendons acting about the ankle joint are the primary generators of a burst of positive power during the step-to-step transition in human walking, termed ankle push-off. 15 Ankle push-off occurs at 45%–65% of the gait cycle, releasing more than 80% of the energy within a short time and doing work of approximately 31.9 J. 31 Therefore, the ankle joint generates a large thrust to accelerate the COM. 16 Thus, which combinations of torque and timing of ankle push-off can enable the robot to obtain a walking speed close to that of humans with lower energy consumption?
At different step lengths
The normalized speed of humans is approximately 0.45 during normal walking. 29 The results show that when the step length is 50° and 60°, the robot obtained a maximum normalized speed of 0.40, which is close to that of humans. We choose two combinations of push-off that correspond to the minimum mechanical cost of transport at the two step lengths. One is T30H20 (that is, the push-off torque is 30 N· m and the push-off height is 20 cm) at θ = 50°, and the other is T32H26 (that is, the push-off torque is 32 N· m and the push-off height is 26 cm) at θ = 60°. For the same walking speed, the mechanical cost of transport corresponding to the step length of 50° is smaller than that at the step length of 60°, and the mechanical costs of transport are 2.25 and 2.96. Next, comparative analysis of the two combinations of push-off will be conducted to explore the reasons why a small step length is more energy saving than a large step length at equal walking speed.
Figure 7 shows the angle, torque, and power curves of the hip, knee, and ankle joints during one gait cycle. When the step length is 50° and 60°, the corresponding normalized walking speed is 0.40. The output power of the hip and knee increases significantly with increasing step length. The ankle power is relatively close at the two different step lengths. For step lengths of 50° and 60° and a normalized walking speed of 0.40, the joint work during one gait cycle is presented in Figure 8. Both the hip work and knee work increase significantly from θ = 50° to θ = 60°. During one gait cycle, there is no significant difference in the ankle work at the two step lengths. When the step length is 50°, the ankle work for the two legs is 42.20 and 41.93 J. When the step length is 60°, the ankle work for the two legs is 44.61 and 45.11 J, as shown in Figure 8 and Table 3. The reason for the larger energy consumption at the step length of 60° is that the hip and knee joints consume more energy than those at the step length of 50°, which leads to an increase in the overall energy consumption of the simulated robot.

Angle, torque and power of joints during one gait cycle.

Joint work during one gait cycle.
Joint work at different push-off combinations at equal normalized walking speed (V = 0.40).

At equal step lengths
When the normalized speed was 0.40 and the step length was 50°, the mechanical cost of transport for three different push-off combinations was analyzed. The push-off combinations are T30H20 (that is, the push-off torque is 30 N· m and the push-off height is 20 cm), T41H14 (that is, the push-off torque is 41 N· m and the push-off height is 14 cm) and T44H13 (that is, the push-off torque is 44 N· m and the push-off height is 13 cm), and the corresponding mechanical costs of transport are 2.25, 2.30, and 2.32, respectively. Figure 9 and Table 3 show the joint work during one gait cycle under the three mechanical costs of transport. The work of the hip and knee has slight differences at equal step length. However, with increasing push-off torque and decreasing push-off height, the ankle work and the mechanical cost of transport increase gradually.

Joint work during one gait cycle at three different mechanical costs of transport.
For a normalized walking speed of 0.40, the angle, torque and power of the ankle joint during one gait cycle at the three different mechanical costs of transport are shown in Figure 10. The motion trends of the ankle joint are basically similar during one gait cycle at the three different mechanical costs of transport. During the ankle push-off phase, the ankle joint changes from flexion to extension, and the ankle angle increases significantly. However, the trends of the torque and power of the ankle joint are obviously different. When the mechanical cost of transport is 2.25 and the corresponding push-off combination is T30H20, the timing, ending and duration of push-off are at 43%, 60%, and 17% of the gait cycle, respectively. When the mechanical cost of transport is 2.30 and the corresponding push-off combination is T41H14, the timing, ending and duration of push-off are at 48%, 60%, and 12% of the gait cycle, respectively. When the mechanical cost of transport is 2.32 and the corresponding push-off combination is T44H13, the timing, ending and duration of push-off are at 49%, 60%, and 11% of the gait cycle, respectively. By comparison, it is found that as the push-off torque increases, the timing of push-off is delayed, and the output power of the ankle joint increases, resulting in an increased mechanical cost of transport at equal walking speed. Therefore, in terms of trade-offs between the walking speed and mechanical cost of transport, when the step length is 50° and the push-off combination is T30H20, the simulated robot obtains the most economical walking gait.

Angle, torque and power of the ankle joint during one gait cycle at three different mechanical costs of transport.
Comparison of dynamical similarity
In this study, the Froude number Fr corresponding to the most economical walking gait of the simulated robot is 0.16, whereas the normal value of the adult human’s Fr is 0.20.29,32 The simulated robot shows a certain degree of dynamical similarity, but it still needs to be further improved. Figure 11 shows the curves of the ground reaction force of the simulated robot and a human during a gait cycle at normal walking speed. The trend of the ground reaction force of the simulated robot is similar to that of the human. The first peak in the ground reaction force is caused by the leading leg of the simulated robot impacting the ground. The ankle push-off of the simulated robot occurs at 43%–60% of the gait cycle, and the ankle push-off of the human occurs at 45%–65% at normal walking speed. The ankle push-off phase of the simulated robot is close to that of humans. Under the action of the ankle push-off, the ground reaction force of the simulated robot appears to have a similar peak to that of humans.
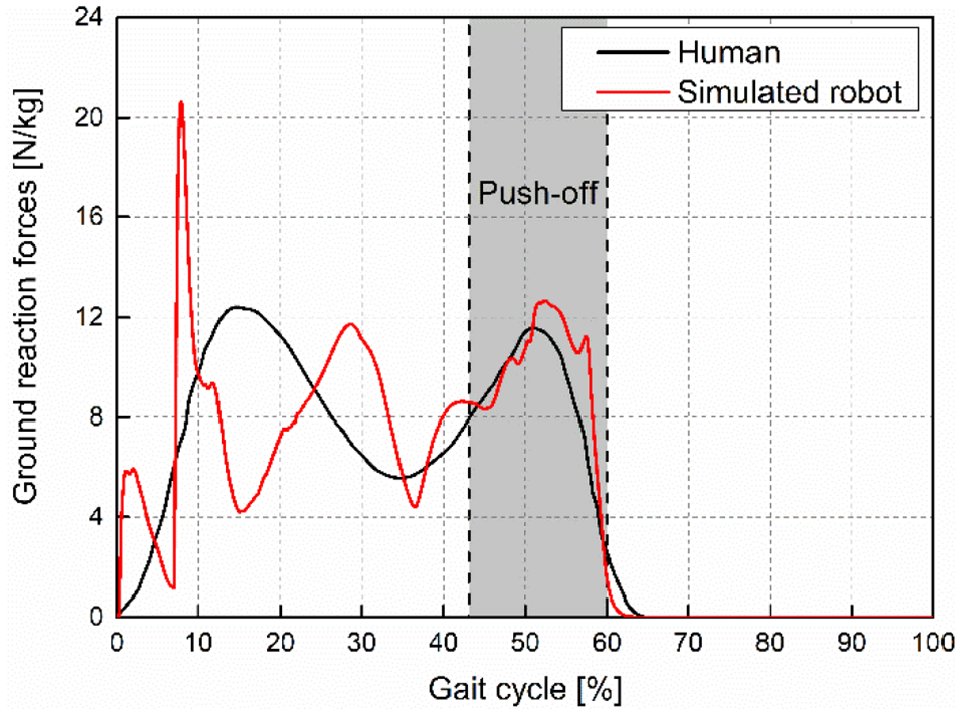
Ground reaction force of the simulated robot (red line) and a human (black line) during one gait cycle at normal walking speed.
Discussion
Walking speed
When the inter-leg angle is 40° and the push-off torque is 20 and 21 N· m, the walking speed suddenly increases with increasing push-off height. When the push-off torque is 20 N· m and the push-off height increases from 11.8 to 11.9 cm, a sudden increase in walking speed is observed, and the normalized speed changes from V = 0.20 to V = 0.35. The results show that this is due to the advance of the push-off timing (from 48% to 31% of the gait period) and the increase of the push-off duration (from 9% to 27% of the gait period), which result in ankle push-off providing more kinetic energy for the swinging leg and accelerating the COM of the simulated robot.
Zelik and Adamczyk 15 suggested that ankle push-off primarily contributes to both leg swing and COM acceleration during human walking. Ankle push-off increases the kinetic energy and speed of the trailing push-off limb. Because the limb is a part of the body COM, ankle push-off also accelerates the speed of the COM. In this study, when the step length is 50° and 60°, the walking speed also shows an increasing trend with increasing push-off torque at equal push-off height, indicating that the ankle push-off can effectively improve the walking speed of the biped robot.
Mechanical cost of transport
The ankle power is produced by the triceps surae (soleus and medial and lateral gastrocnemius) and other extrinsic foot muscle–tendon units about the ankle joint.15,33,34 The Achilles tendon is stretched and stores energy when the shank rotates around the ankle joint during the stance period. The peak power generated by ankle push-off is due partly to elastic recoil of the Achilles tendon within a short time.35–37 In addition, the deformation of soft tissue can absorb and dissipate the energy in collision and impact during walking. Soft tissues also release substantial energy to the body by elastic rebound. 27 For example, DURUS, a large-scale humanoid biped robot, was designed with a spring flexible structure of the ankle to store and release energy. 19 Its energy efficiency has been improved during walking tests. However, there is no compliance structure about the ankle joint in this study, and the energy lost in collision during walking cannot be effectively stored. Therefore, the energy efficiency of the simulated robot has not been significantly improved.
Kuo 8 concluded that humans rely mainly on passive limb dynamics and power their walking gait primarily with ankle push-off. Humans begin push-off before heel strike of the leading leg near the terminal stance (at 45%–65% of the stride cycle), continuing positive work about the ankle joint even after heel strike and through most of the double support period. 26 In this study, both the hip and knee joints were controlled at all times to track the planned trajectory. Only the ankle joint was passive during the early stance and late swing phase. The simulated robot does not make full use of passive dynamics, and its energy consumption is not significantly reduced. Furthermore, Kuo 8 presented that with proper timing of ankle push-off, considerable energy savings may be realized. In this study, when the step length is 50° and the normalized walking speed is greater than 0.30, the earlier the timing of ankle push-off at equal speed is, the lower the energy consumption. The mechanical cost of transport increases with delay of the push-off timing. Therefore, coordination of the torque and timing of ankle push-off is critical to improve the energy efficiency.
Hobbelen and Wisse 13 suggested that the mechanical cost of transport increases with increasing step length, which is due to the increasing amount of positive work during the step-to-step transition. More work also needs to be done to change the direction of the COM of the robot.21,26,38 In this study, the mechanical cost of transport increases with increasing step length under different combinations of ankle push-off, indicating that it is not economical to obtain a specific walking speed through a larger step length.
Balance between the walking speed and mechanical cost of transport
Kuo 8 studied the trade-offs between economy and versatility in dynamic walking biped robots. It is also considered that the main energy loss in dynamic walking is caused by the leading leg collision with the ground. The energy loss for each step is proportional to the square of the speed and the square of the inter-leg angle, so the energy consumption increases with increasing inter-leg angle (that is, step length). The strategy of ankle push-off could effectively push upward on the center of mass, thus reducing the leg speed before collision and the loss of energy. In addition, ankle push-off before heel strike is four times more energy efficient than push-off after heel strike.39,40 The biped robot Meta started the ankle push-off after the leading leg impact, and the mechanical cost of transport was not reduced. In this study, when the step length is 50° and the normalized walking speed is greater than 0.30, the earlier the push-off timing is at the same speed, the lower the mechanical cost of transport, which indicates that the appropriate timing of push-off can effectively reduce the mechanical cost of transport.
Moreover, the foot length and radius of curvature of the foot have a significant effect on energy loss. Setting springs in the hip joint can improve the energy economy. In this study, to study the influence of ankle push-off on the walking speed and mechanical cost of transport, a hip with springs and curved feet were not designed for the simulated robot. In the future, we could try to design robots with compliance springs to further improve the energy economy.
Dynamical similarity
The gaits of biped robots being dynamically similar to those in human walking can better help us understand the biomechanics of human walking.13,29 In this study, the simulated robot shows a certain degree of dynamical similarity to the human. This indicates that ankle push-off is helpful for improving the dynamic characteristics of biped robots. The passive limb dynamics will later be considered to acquire a highly economical walking gait.
Comparison between the simulation robot and physical biped robot
The effect of ankle push-off on the walking gait of the physical robot showed that the ankle movement pattern is significantly different from that of humans. 28 The ankle angle of the human data during a normal walking speed increases first at 50% of the gait cycle and then decreases at 65% of the gait period. However, the ankle angle in the literature 28 basically remains stable at the late stage of the gait cycle. The compliant ankles with soft bidirectional rotational springs were used to push off the biped robot. Because the springs cannot provide a sufficient driving torque for the ankle, the movement pattern of the ankle joint of the robot is also quite different from that of humans. It also further suggests that the passive ankle push-off does not effectively provide the ankle joint with a similar movement pattern to humans. In our study, the ankle joint of simulation biped robot has shown the similar movement pattern to humans using the active ankle push-off.
In addition, the Cornell Ranger is a four-legged knee-less biped robot with actuated hip and ankle joints. This biped walked 65.2 km in about 31 h with a total cost of transport (TCOT) of 0.28, which is very similar to human’s TCOT of 0.3. The normalized walking speed of Ranger is about 0.17. The normal value of the adult human’s normalized speed of 0.45. Ranger’s speed is smaller than that of humans. This may be due to that further speed increases are limited by the knee-less and the appropriate step time. 41 In order to balance the walking speed and energy efficiency of the biped robot, the actuated knee joint, the amount and timing of ankle push-off may be needed. In this study, the normalized walking speed of the simulated robot is 0.40, which is similar to the human’s speed.
Conclusion
In this study, we focused on the effects of the step length, torque and timing of ankle push-off on the walking speed, energy efficiency and dynamical similarity. When the inter-leg angle (that is, step length) is 40°, 50°, and 60°, the walking speed increases with increasing push-off torque. However, the mechanical cost of transport does not change significantly. Increasing the step length by increasing inter-leg angle
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the project of National Key R&D Program of China (No. 2018YFC2001300), National Natural Science Foundation of China (Nos. 91848204, 91948302, and 51675222).