
Abstract
The triceps surae muscle serves as the primary power source for ankle push-off during normal walking and contributes to improved gait economy. However, insufficient power output from the muscles around the ankle joint leads to increased metabolic cost. In this study, a pneumatically driven biarticular knee-ankle exoskeleton robot was designed based on the biomechanical principles of ankle push-off, employing artificial pneumatic muscles to mimic the synergistic actuation characteristics of the soleus and gastrocnemius muscles. Using the indirect calorimetry device K5, assistance performance experiments of the exoskeleton were conducted under different walking speeds (0.2, 0.4, and 0.6 m/s), slopes (level ground, 5° uphill, and 5° downhill), and assistance parameters (low, medium, and high magnitude). The results showed that compared with walking unpowered exoskeleton, medium-intensity (2.25 bar) assistance reduced the metabolic cost by approximately 22% (2.23 ± 0.47 W kg−1) during walking at 0.2 m/s on level ground. During walking at 0.6 m/s on a 5° uphill slope, high-intensity (3.0 bar) assistance reduced the metabolic cost by approximately 15% (4.08 ± 1.04 W kg−1). The effectiveness of assistance varied significantly across terrains under the same assistance intensity. This study provides valuable insights into the exoskeleton adaptability used on diverse terrains and the bionic design of exoskeletons.
Introduction
Survival of the fittest through continuous evolution and learning has enabled the human beings to develop a highly adapted skeletal muscle system 1 and nervous system 2 that are optimized for locomotion. These systems allow adaptation to diverse terrains and facilitate energy-efficient movements such as, walking, running, and jumping. Among these, walking represents the most commonly adopted gait for low-speed locomotion in human beings. 3 Researchers have analogized the walking process using an inverted pendulum model, 4 indicating that it has the characteristics of low metabolic cost and good gait economy. However, for outdoor professionals, such as soldiers engaged in long-distance marches and scientists conducting jungle expeditions, geological surveys, or wildlife research, excessive energy consumption and subsequent muscle fatigue still significantly limit the mobility range of human motion. Therefore, the researchers tried to assist humans in medium and long distance walking through exoskeleton robotics to reduce metabolic energy consumption,5–7 with the goal of making walking easier and achieving some results.
As a robot that can provide protection, support, and assistance functions for wearers, exoskeleton robots have been used in industries, 8 medical, 9 military,10,11 and other fields. For healthy humans, exoskeletons can reduce the metabolic cost of walking to below that of normal walking by assisting joint locomotion. 12 Research shows that during normal walking, the gastrocnemius and soleus muscles around the ankle joint have a burst power output during the ankle push-off at the end of the stance phase, and their output power accounts for more than 80% of the entire center of mass of the body, 13 producing a peak moment and peak power of 3–4 times compared to the hip and knee joints,14,15 which contributes the greatest contribution to walking. Therefore, ankle exoskeleton robots have become a focus of research. For example, Collins et al. 5 developed an unpowered ankle exoskeleton by imitating the calf muscles and Achilles tendon to provide assistant power to the ankle joint during ankle push-off. It uses a combination of a passive tension spring and a clutch mechanism to hold a spring as it is stretched and relaxed by ankle movements during walking, which stores elastic potential energy and releases it at a suitable gait phase. The results showed that wearing the exoskeleton reduced the metabolic cost of walking by 7.2% ± 2.6%. The ankle exoskeleton developed by Hu et al. 16 and Chen et al. 17 was based on the passive assistance of a series-parallel spring and verified the feasibility of the exoskeleton. However, the amplitude of the assistance torque provided by the spring is relatively small, and the assistance effect needs to be improved.
Compared with the passive assistance method, the active actuation mode can provide greater assistance torque. 18 Collins et al. developed the active ankle exoskeleton powered by driven rope based on “human in the loop” and data-driven method in 2017 19 and 2022, 20 respectively. Compared with the unpowered exoskeleton, the unilateral ankle exoskeleton optimized torque mode reduced the metabolic cost by 24.2% ± 7.4%. Compared with walking without the exoskeleton, the latter can reduce metabolic energy cost by 17% ± 5% after walking in an outdoor environment for a certain distance. During normal human walking, many skeletal muscles follow a certain coordination pattern to stabilize joints and propel the body forward, 21 but the above-mentioned exoskeleton robot drives relatively single. Asbeck et al. 22 at Harvard University developed a flexible fabric wearable exoskeleton driven by motor-actuated cables. It uses the synergistic enhancement effect of the lower limb joints to actively assist plantar flexion movement of the ankle joint and passively assist the hip joint. However, the cable driving mode commonly used in exoskeletons is quite different from the self-driven characteristics of the human skeletal muscle system. There are problems such as long force transmission path and single assist direction, which leads to low driving efficiency and weak support and assistance capabilities, which leads to reduced assist effect.
Normal walking of the human beings is essentially completed by skeletal muscles under the control of the central nervous system. 23 The skeletal muscle system is characterized by high driving efficiency and strong explosive power, which play a variety of roles during locomotion, such as “motors, brakes, springs and struts.” 4 Thus, some researchers have developed soft exoskeletons that mimic the performance of human skeletal muscles. The muscles around the ankle joint and the Achilles tendon store elastic potential energy and release mechanical energy during the gait cycle. It has short pinnate muscle fibers and long compliant series tendon muscles that are well-suited for low-energy locomotion. For example, Harvard University designed and developed two representative pneumatically driven flexible exoskeletons. The former connects both ends of the muscles to various “anchor points” to transmit the driving force through hooks. However, the switching control system adopted by this system results in a mismatch between the maximum output torque and joint requirements, thereby failing to significantly reduce the metabolic cost. 24 The latter adopts a design scheme of four pneumatic muscles, which mimics the morphology and functionality of the biological muscle-tendon-ligament structure. The results showed that the prototype was capable of generating an ankle range of motion of 14° dorsiflexion and 13° plantarflexion. 25 However, the assisting experiments have not yet been reported. In addition to assisting the ankle joint when walking on level ground, researchers have developed an ankle exoskeleton to assist joints for uphill walking, which uses pneumatic muscles to assist plantar flexion. The results show that compared with the unpowered exoskeleton, the powered exoskeleton can reduce the metabolic cost by more than 10%. 26 Nevertheless, the synergy characteristic between the soleus and gastrocnemius muscles is difficult to imitate in the mentioned pneumatic exoskeleton.
To sum up, the existing ankle exoskeleton driver parts are mostly worn near the calf gastrocnemius muscle, and the assist area is relatively fixed. The calf gastrocnemius muscle is a biarticular muscle that spans the knee and ankle joints. Therefore, factors such as the starting position and spatial arrangement of the gastrocnemius muscle and the coordinated driving of the soleus and gastrocnemius muscles are also considered in the design of the ankle exoskeleton, which is expected to further reduce the metabolic cost during walking. Studies have shown that the soleus and gastrocnemius muscles synergistically drive the output peak power to ankle push-off during walking. The ankle push-off can not only support plantar flexion of the ankle joint, but also help change the direction of the body’s center of mass and push the body forward.27,28 Pneumatic artificial muscles (PAMs) are soft and flexible linear pneumatic actuators, that are lightweight, can generate substantial contraction force and explosive power, and have actuation characteristics similar to those of human muscles. Therefore, these characteristics are widely used in pneumatic ankle exoskeleton robots.26,29,30
This study presents a biarticular knee-ankle pneumatic exoskeleton designed by mimicking the coordinated driving mode and muscle spatial position arrangement of the soleus and gastrocnemius muscles. Three PAMs were used to mimic the gastrocnemius and soleus muscles, which were driven to improve driving assistance and reduce the metabolic cost of walking. In addition to simulating the driving characteristics of the triceps surae, optimal assistance parameters (such as assistance timing and power) are crucial for further reducing the metabolic cost. To determine the impact of exoskeleton assistance power on walking metabolic cost, the metabolic cost of humans with biarticular knee-ankle pneumatic exoskeleton under different assistance magnitudes was studied. The study of assistance parameters will help better understand the assistance mechanism of the biarticular knee-ankle pneumatic exoskeleton.
The overall goal of this study is to explore the effects of assistance magnitude on joint kinematics and metabolic cost of human beings with the biarticular knee-ankle pneumatic exoskeleton during locomotion at different walking speeds and terrains by mimicking the synergistic actuation of the gastrocnemius and soleus muscles. The remainder of this paper is organized as follows: Section “Methods” introduces the hardware and software compositions, such as the mechanical structure of the ankle exoskeleton, sensor system, and control methods. Section “Results” primarily analyzes the metabolic cost of humans using the exoskeleton. Section “Discussion” discusses the experimental results of ankle exoskeleton-assisted walking and summarizes the limitations of the study and future directions of research. Finally, Section “Limitations and future work” presents the conclusions of this paper.
Methods
Exoskeletons
The triceps surae muscle, composed of the soleus and gastrocnemius muscles, serves both as the primary muscle supporting upright standing and a key stabilizer for locomotion gait. As the main power source for human ankle push-off, it plays a crucial role in walking. The soleus muscle primarily maintains stability between the lower leg and foot during standing, ensuring postural balance and joint stabilization, whereas the gastrocnemius muscle mainly provides the propulsive force required for the body to move forward. Based on engineering bionics technology, this study designed a biarticular knee-ankle exoskeleton robot that imitates the calf triceps surae. The exoskeleton robot weighs approximately 2.1 kg and consists primarily of a leg-mounted frame, artificial pneumatic muscles, and a foot bottom mechanism, as shown in Figure 1. The arrangement of the pneumatic muscles mimics the distribution of the triceps surae: two outer muscles imitate the gastrocnemius muscles, with their upper ends fixed to the frame above the knee joint, whereas the medial muscle imitates the soleus muscle, which is fixed to the frame below the knee joint. All three pneumatic muscles converge at the heel and the pneumatic muscles are connected to an air pump, achieving assistance for ankle joint plantar flexion through contraction of the pneumatic muscles under inflation pressure. The footplate mechanism of the exoskeleton is primarily constructed from an aluminum alloy. To protect the human knee joints and ensure wear comfort, the exoskeleton was fixed to the lower thigh and upper calves through flexible fabric Velcro straps, which can facilitate the wearing of humans of different heights. Additionally, to prevent the fixing frame above the knee joint from falling off due to stress, a shoulder strap was provided. To prevent the fixed mechanism above the knee joint from dislodging under load, shoulder straps were set.

Schematic diagram of biarticular pneumatic knee-ankle exoskeleton: (a) Bionic design of the ankle exoskeleton, (b) The sensing system consisting of an encoder and plantar pressure sensors, The control system consisting of the control hardware and proportional pressure regulating valve and (c) The ankle exoskeleton prototype.
Subjects
The plantar flexion range of the ankle joint is 30°–50°, and the dorsal extension range is 20°–30°, so the structural design of the exoskeleton must be accommodated as much as possible. According to the literature, 31 the corresponding range of peak ankle torque during normal walking is 1.4–1.9 N m/kg. Assuming an ordinary adult weight of 65 kg, the corresponding peak biological ankle torque ranged from 91.0 to 123.5 N m. The required assistance torque mentioned in Galle et al. 29 was about approximately 50%–80% of the peak ankle torque. In this study, the assistance torque was selected as 50% of the peak ankle torque, resulting in a pneumatic muscle torque output of approximately 45.5–61.8 N m. With the designed mechanical structure lever arm of 0.074 m, the pneumatic muscles need to provide a total force ranging from 614.9 to 834.6 N. Based on the required assistance magnitude and the wearer’s lower leg dimensions, two artificial pneumatic muscles from FESTO, Germany, were selected. The models are DMSP-10-251N-RM-RM and DMSP-10-126N-RM-RM (Festo, Esslingen, Germany). The outer diameter of the pneumatic muscle was 10 mm, and the length was 251 and 126 mm. The pneumatic muscles with a length of 251 mm were configured as the medial and lateral gastrocnemius of the exoskeleton, and the pneumatic muscle with a length of 126 mm was configured as the soleus of the exoskeleton.
The push-off timing significantly impacts the walking economy. Appropriate push-off timing can enhance gait efficiency, thereby reducing the energy cost. To determine the assistance timing of ankle push-off during walking, and acquire the intention of human locomotion, and determine the assistance timing of the biarticular pneumatic knee-ankle exoskeleton, this study designed a pressure insole. As shown in Figure 1, three FSR402 resistive membrane pressure sensors were fixed on the heel, forefoot, and thumb of the insole. By collecting the sole pressure sensor data, the plantar pressure changes during the complete gait cycle were determined. According to the change trend of plantar pressure, the heel was judged to be in the toe-off or heel-strike phase. In addition, to obtain the motion curve of the human ankle joint, an absolute value encoder (SA100, WHEELTEC Co. Ltd., Guangdong, China) was equipped at the ankle joint, with an angular resolution of 0.09° and a linear error of less than ±0.35°. By testing the angle change of the ankle joint, it is possible to further analyze whether the motion of the human ankle joint is restricted after wearing the exoskeleton.
Based on the STM32F102 control board, a control program was developed to drive the biarticular pneumatic knee-ankle exoskeleton. The plantar pressure and ankle joint angle during walking were obtained by collecting data from plantar pressure sensors and ankle joint encoders. When the heel pressure decreased to zero, the forefoot and toe pressures were greater than zero, and the ankle joint angle began to gradually increase, the push-off timing of the ankle joint exoskeleton was obtained. The assistance ended when the toe pressure reached zero. The air pump (DC2081-1200W) pressure was set to P to determine the magnitude of assistance. The STM32 control board was used to send control commands (0–10 V analog signal linearly corresponding to 0–P MPa) to the proportional pressure regulator valve (VPPE-3-1-1/8-6-010-E1, Festo, Esslingen, Germany). The pneumatic muscle was actuated by controlling the solenoid valve (VUVS-L25-M32C-MD-G14-F8, Festo, Esslingen, Germany). Muscle contraction assisted the ankle joint exoskeleton, ultimately achieving control over the assistance magnitude. During the experiment, the assistance magnitude was adjusted by setting different voltage values, thereby altering the assistance amplitude of the exoskeleton.
Two healthy female participants (age 21.3 ± 2.2 years, weight 69.8 ± 9.2 kg, height 1.62 ± 4.9 m) participated in the study. They had no previous experience walking with exoskeletons, but they had experience with treadmill walking. All participants gave written informed consent and the protocol was approved by the ethical committee of the Chinese PLA General Hospital (Protocol number: S2025-519-01). Two participants sequentially performed warm-up exercises before the trial. First, the participants warmed up on a treadmill at normal walking speed for 3 min without wearing the exoskeleton, followed by a 1 min rest. Next, the participants wore the exoskeleton without actuation and walked on the treadmill for 3 min to adapt to the weight of the device, and then rested for another minute. Subsequently, the exoskeleton was activated, and the participants walked on the treadmill for 3 min to adapt to the assistance provided by the exoskeleton, after which they rested for 1 min. Through repeated training, the participants became accustomed to walking both with and without exoskeleton assistance before formally commencing the exoskeleton assistance effectiveness evaluation experiment.
Data collection and analysis
The exoskeleton assistance performance test platform was mainly composed of a COSMED K5 portable gas metabolism analyzer (COSMED K5, Co. Ltd., Rome, Italy) and a three-dimensional force measurement gait analysis treadmill (FIT5 V5, Bertec Co., USA). Based on the experimental test scheme of pneumatic ankle exoskeleton-assisted performance, during the entire experiment, the participants wore a K5 portable gas metabolism analyzer, as shown in Figure 2. The participant wore the biarticular pneumatic knee-ankle exoskeleton on the left leg and the walking speed and slope were controlled using three-dimensional force gait analysis. Through the exoskeleton control system, assistance parameters for different assistance timing and magnitude combinations were determined. Using the K5 gas metabolism analyzer, metabolic cost data in the two situations of level ground, 5° uphill, and 5° downhill, as well as different walking speeds (0.2, 0.4, and 0.6 m/s), with the exoskeleton powered-on (5, 7.5, and 10 V, corresponding to the air pressures of 0.15, 0.225, and 0.3 MPa, i.e. 1.5, 2.25, 3 bar) and exoskeleton powered-off. According to the theoretical force-contraction rate relationship curve of Festo’s pneumatic muscles, the assistance magnitudes were estimated to be approximately 3.75, 7.5, and 15 N m, respectively. In this study, we selected two participants with approximate height, weight, and age who had never used an exoskeleton before to minimize variability caused by differences in sample conditions. Regarding equipment usage, the K5 portable metabolic respiratory analyzer was rigorously calibrated before each experiment. After wearing the exoskeleton, we ensured training methods and durations remained consistent to reduce environmental and equipment-related variability. In future work, we will optimize the structure and control system of the exoskeleton prototypes, and plan to increase the sample size by selecting about 10 participants for in-depth analysis of exoskeleton assistance performance.

Experimental scene setup: (a) The treadmill can control the walking speed and adjust the ground slope, The shoulder straps are connected to the upper part of the exoskeleton to prevent it from falling off under force and (b) The participant wore a biarticular pneumatic knee-ankle exoskeleton on left leg and carried a K5 portable gas metabolism analyzer.
The K5 portable gas metabolism analyzer can record the O2 consumption and CO2 emissions of the test participants in real time during testing. Using equation (1), 32 the metabolic cost EE per unit time during walking can be calculated, thereby further analyzing the assistive performance of the biarticular pneumatic knee-ankle exoskeleton.

V O 2 (L/min) represents oxygen consumption, and V CO 2 (L/min) represents carbon dioxide production. Because each subject’s body weight differed, to facilitate the comparison of metabolic cost levels, the metabolic expenditure EE (kcal/min) was divided by body weight (kg) for normalization. After normalization, the metabolic cost per unit body weight Ekg (W/kg) was obtained.
First, the gait cycle was divided based on pressure sensor data from the heel, forefoot, and toe positions. Specifically, two consecutive heel strikes of the same foot were defined as a single gait cycle, which sequentially included the stance and swing phases. Owing to the limitations of the exoskeleton structure, the participants walked slowly after wearing it. During treadmill walking, the toe and forefoot often contacted the ground before the heel; therefore the gait cycle was defined from the toe strike to the next toe strike, as shown in Figure 3. Data from three consecutive gait cycles were selected, normalized, and analyzed to examine the effects of terrain, walking speed, and assistance magnitude on ankle joint motion and metabolic cost while wearing the exoskeleton.

Movement state of the ankle joint during the gait cycle: (a) The toes were about to touch the ground during the early stance, (b) The forefoot touches the ground, (c) Entire sole makes contact with the ground, (d) The lower leg and foot are at right angles during the mid-stance period, (e) Late stance phase, heel preparing to lift off, (f) Propulsion phase, heel lifts off, and power generation begins during the push-off stage, (g) The forefoot lifts off the ground, (h) Toe lifts off, power generation ends and (i) The toes prepare to touch the ground again.
Results
The effect of exoskeletons on ankle joint movement
The changes in the ankle joint angles of humans wearing exoskeletons under different motion scenarios (level ground, 5° uphill, and 5° downhill), walking speeds (0.2, 0.4, and 0.6 m/s), and assistance magnitudes (1.5 bar corresponding to low-intensity assistance, 2.25 bar to medium-intensity assistance, and 3.0 bar to high-intensity assistance) were shown in Figure 4. The results indicate that when walking on level ground and 5° uphill terrain wearing the exoskeleton, the trends of ankle joint angle changes vary significantly with different assistance magnitudes after. In contrast, during 5° downhill walking at the same speed, the trend of ankle joint angle changes remained largely similar across different assistance magnitudes. As walking speed increases, the fluctuations amplitude of ankle joint angle also increases. Therefore, the influence of assistance magnitude on ankle joint angles was more significant on level ground and 5° uphill terrain, whereas it remained relatively stable during 5° downhill walking.
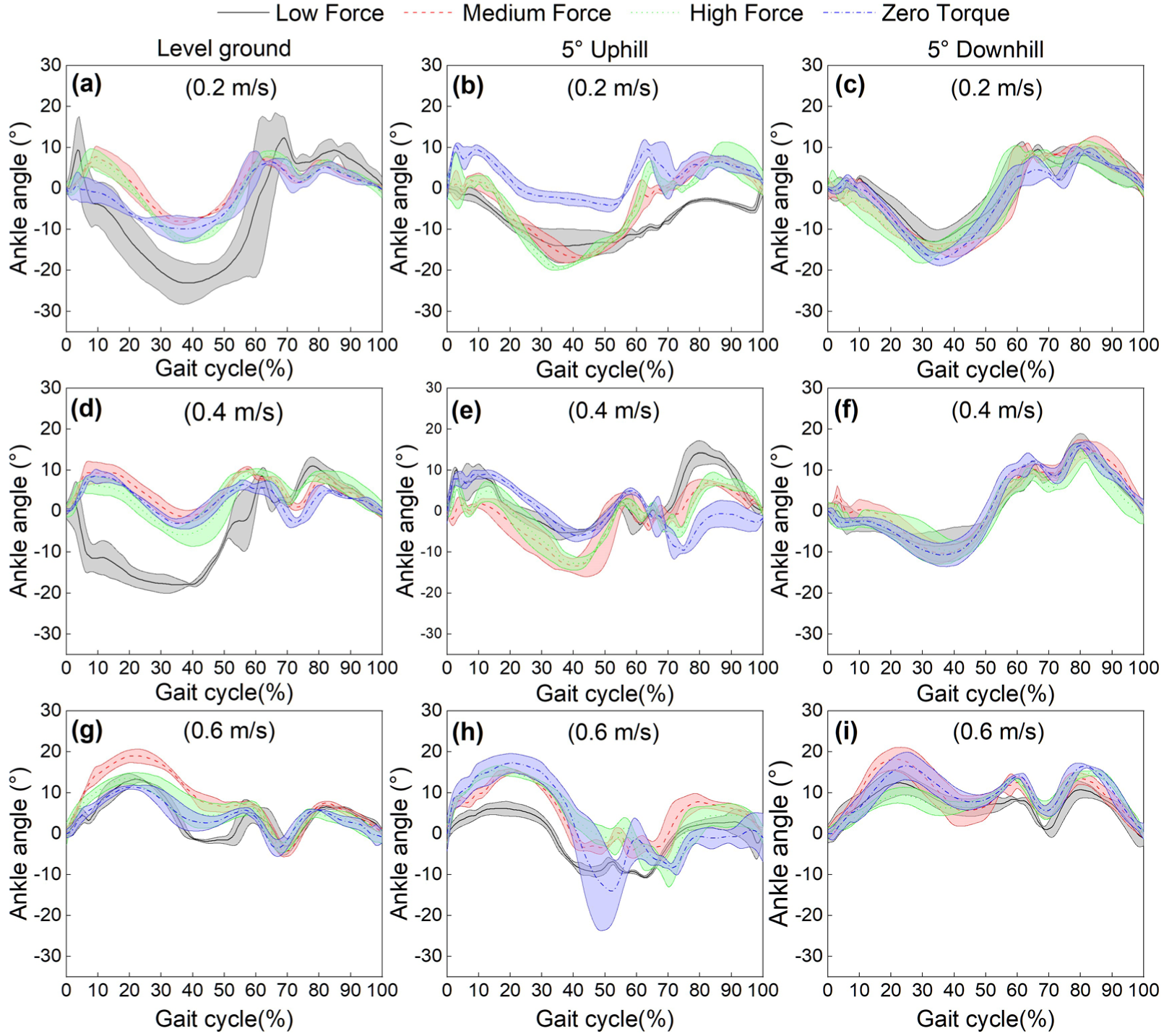
Changes in ankle joint angles of the participants. The motion scenarios included level ground, 5° uphill, and 5° downhill, with walking speeds of 0.2, 0.4, and 0.6 m/s, respectively. The assistance magnitudes provided by the exoskeleton were 1.5 (low-intensity assistance), 2.25 (medium-intensity assistance), and 3.0 bar (high-intensity assistance): (a) Angle joint angles on level ground at walking speed of 0.2 m/s. (b) Angle joint angles on 5° uphill terrain at walking speed of 0.2 m/s. (c) Angle joint angles on 5° downhill terrain at walking speed of 0.2 m/s. (d) Angle joint angles on level ground at walking speed of 0.4 m/s. (e) Angle joint angles on 5° uphill terrain at walking speed of 0.4 m/s. (f) Angle joint angles on 5° downhill terrain at walking speed of 0.4 m/s. (g) Angle joint angles on level ground at walking speed of 0.6 m/s. (h) Angle joint angles on 5° uphill terrain at walking speed of 0.6 m/s and (i) Angle joint angles on on 5° downhill terrain at walking speed of 0.6 m/s.
On level ground, when the participant walking at a speed of 0.2 m/s without exoskeleton assistance, the ankle joint exhibited approximately 10° plantar flexion during the early stance phase (0%–40% of the gait cycle). Subsequently, during the mid-stance phase (40%–65% of the gait cycle), the ankle joint demonstrated approximately 16° dorsal extension. Subsequently, the heel lifts off. During the period from the late stance phase to the early stage of ankle push-off (65%–75% of the gait cycle), the ankle joint showed a slight plantar flexion of approximately 5°. This is succeeded by toe-off and the transition into the swing phase (75%–100% of the gait cycle). During this phase, the ankle joint performs a slight dorsal extension to adjust the posture in preparation for the early touchdown stage of the next gait cycle, as shown in Figure 4(a).
Compared to the exoskeleton powered-off, under low-intensity assistance (corresponding to 1.5 bar air pressure), the range of motion of the ankle joint significantly increased to approximately 35°. In contrast, under medium- and high-intensity assistance, the ankle joint range of motion exhibited smaller fluctuations. When the walking speed increased to 0.4 m/s, under medium-intensity and high-intensity assistance, the change trend of ankle angle was similar to that of the exoskeleton powered off, that is, during the touching period (0%–60% of the gait cycle), the motion range was approximately 10°, as shown in Figure 4(d). However, under low-intensity assistance, the change trend of ankle angle is significantly different from the unassisted conditions, which was manifested as plantar flexion at the beginning of the touchdown (0%–40% of the gait cycle), and then dorsal extension begins at the end of the touchdown (40%–60% of the gait cycle). During the swing period, the ankle motion range was small, and the overall range of motion was approximately 25°.
When the walking speed further increased to 0.6 m/s, the participant wearing an exoskeleton maintained a similar trend in ankle joint motion across different assistance intensities, as shown in Figure 4(g). On level ground, compared to the powered-off condition of the exoskeleton, when the walking speed was 0.6 m/s and under high-intensity assistance (corresponding to 3.0 bar air pressure), the variation curve of the ankle joint angle demonstrates a similar tendency. During the stance phase, the ankle joint angle firstly increased and then subsequently decreased. During the ankle push-off phase, it exhibited a slight increase followed by a decrease. During the swing phase it returned to the initial contact angle.
On 5° uphill terrain, when the walking speed was 0.2 m/s and the exoskeleton was powered off, the ankle joint showed a slight dorsal extension in the early stage of touchdown (0%–10% of the gait cycle), and then gradually turned to plantar flexion until the dorsal extension occurred again in the end stage of touchdown (50%–60% of the gait cycle). During the swing period, the joint readjusts to adapt to the next gait cycle, as shown in Figure 4(b). Under the three assistance modes, the movement modes of the human ankle joint were similar. The plantar flexion of the ankle joint in the early stage of touchdown (0%–40% of the gait cycle) was approximately 20°. The dorsal extension began at the end of touchdown (40%–60% of the gait cycle), and the greater the assist intensity in the early stage of swing (60%–80% of the gait cycle), the greater the aid strength and the greater movement range of the ankle joint. When the walking speed was increased to 0.4 m/s, the trends of ankle angle were similar regardless of whether the wearable was in the three assistance modes, which were manifested as alternate movements of dorsal extension and plantar flexion, as shown in Figure 4(e). When the walking speed was 0.6 m/s, the range of motion of the ankle joint during the stance period was large under the exoskeleton powered-on, approximately 30°. However, under the three assist modes, the range of motion of the ankle joint was relatively close, approximately 15°, as shown in Figure 4(h).
On 5° downhill terrain, the movement trends of the ankle joints of the human body remain similar regardless of the walking speed and assistance mode, as shown in Figure 4(c). Specifically, when the walking speeds were 0.2 and 0.4 m/s, the ankle joint was plantar-flexed firstly, followed by dorsal extension and slight fluctuations during the single gait cycle. When the walking speed increased to 0.6 m/s, as shown in Figure 4(i), the movement sequence of the ankle joint first became dorsal extension (0%–20% of the gait cycle) and then plantar flexion (20%–40% of the gait cycle). Subsequently, the human body progresses to the terminal phase of the stance and swing stages. The ankle joint maintains the soles of the feet off the ground via plantar flexion, which ensure the stability of the foot posture during the initial phase of the touch stage in the subsequent gait cycle.
Analysis of the metabolic cost
On level ground, 5° uphill, and 5° downhill, the metabolic cost results of participants at different walking speeds (slow walk represents 0.2 m/s, normal walk represents 0.4 m/s, fast walk represents 0.6 m/s) under five conditions: wearing ordinary shoes (No exoskeleton), wearing the exoskeleton powered-off, wearing the exoskeleton in low-intensity assistance mode (1.5 bar), wearing the exoskeleton in medium-intensity assistance mode (2.25 bar), and wearing the exoskeleton in high-intensity assistance mode (3.0 bar) are shown in Figure 5. Light gray represents wearing the exoskeleton powered-off, dark gray represents wearing ordinary shoes, red represents the low-intensity assistance mode, blue represents the medium-intensity assistance mode, and green represents the high-intensity assistance mode. As shown in Figure 5, compared to wearing ordinary shoes, wearing exoskeletons did not reduce the metabolic cost, regardless of whether it assisted or not. Under different terrains and walking speeds, the metabolic cost of the human body when wearing ordinary shoes was lower than the energy consumption when wearing exoskeletons. Among them, when walking at normal speed on level ground, the metabolic cost was the lowest (1.52 ± 0.44 W kg−1). When walking quickly in 5° uphill terrain, the metabolic cost was the highest (2.37 ± 0.43 W kg−1). Compared with the level ground and 5° uphill, the metabolic cost under different walking speeds and assistance modes was relatively lower on the 5° downhill terrain.

The metabolic energy cost when walking at low, normal, and fast speeds under five conditions. A zero torque represents the exoskeleton powered off. No exoskeleton represents the condition without an exoskeleton and wearing ordinary shoes. Low force represents the exoskeleton in the low-intensity assistance mode (corresponding to 1.5 bar). Medium force represents the exoskeleton in the medium-intensity assistance mode (corresponding to 2.25 bar). High force represents with exoskeleton in high-intensity assistance mode (corresponding to 3.0 bar): (a) The level ground, (b) The 5° uphill terrain and (c) The 5° downhill terrain.
On the level ground, compared to walking with an unpowered exoskeleton, during slow walking at a speed of 0.2 m/s, low-intensity assistance corresponded to a 9% reduction in metabolic cost, medium-intensity assistance corresponded to a 22% reduction, and high-intensity assistance resulted in a 23% increase in metabolic cost, with corresponding values of 2.59 ± 0.60, 2.23 ± 0.47, and 3.51 ± 0.49 W kg−1, respectively, as shown in Figure 3(a) and Table 1. During normal walking at a speed of 0.4 m/s, as the assistance magnitude increased, the metabolic cost gradually decreased, with a 21% reduction under high-intensity assistance mode, corresponding to values of 3.32 ± 0.83, 3.10 ± 0.38, and 2.95 ± 0.56 W kg−1, respectively. During fast walking at a speed of 0.6 m/s, the metabolic cost increases by 32%, 27%, and 4% under low-, medium-, and high-intensity assistance, respectively.
The metabolic cost under different assistance modes.

Values are presented as mean ± standard deviation. Zero torque represents an assistance magnitude of 0; No exo indicates walking without an exoskeleton, low-intensity mode corresponds to an assistance magnitude of 1.5 bar; medium-intensity mode corresponds to 2.25 bar; and high-intensity mode corresponds to 3.0 bar.
On the 5° uphill terrain, when walking with an unpowered exoskeleton, as the walking speed increased, the metabolic cost exhibited a rapidly increasing trend, as shown in Figure 3(b). The corresponding metabolic costs were 2.59 ± 0.42, 3.38 ± 0.84, and 4.81 ± 0.75 W kg−1, respectively. Compared walking with exoskeleton powered-off, no reduction in metabolic cost was observed during walking at slow and normal speeds, under low, medium, and high-intensity assistance conditions. However, during fast walking, under the medium intensity and high intensity assistance conditions, the metabolic costs were 4.17 ± 0.98 and 4.08 ± 1.04 W kg−1 respectively, reduced by 13% and 15%.
On the 5° downhill terrain, when walking with an unpowered exoskeleton, as the walking speed increased, the metabolic cost showed a slight increasing trend, as shown in Figure 3(c). The corresponding metabolic costs were 1.95 ± 0.31, 2.03 ± 0.45, and 2.27 ± 0.28 W kg−1, respectively. Compared walking with exoskeleton powered-off, when walking at slow and normal speeds, the metabolic cost was not reduced under low-, medium-, and high-intensity assistance. However, during fast walking, medium-intensity assistance reduced the metabolic cost by 3% to 2.21 ± 0.45 W kg−1. In contrast, under the low-intensity and high-intensity assistance conditions, the metabolic cost increased by 7% and 11%, respectively, to 2.43 ± 0.40 and 2.51 ± 1.04 W kg−1, respectively.
Compared walking with exoskeleton powered-off, during slow-speed walking on level ground, the metabolic cost corresponding to medium-intensity assistance was 2.23 ± 0.47 W kg−1, representing a 22% reduction. During fast walking on the 5° uphill terrain, the metabolic cost under high-intensity assistance was 4.08 ± 1.04 W kg−1, showing a 15% decrease. During fast walking on the 5° downhill terrain, the metabolic cost corresponding to medium-intensity assistance was 2.21 ± 0.45 W kg−1, reflecting a 3% decrease. Compared with walking without an exoskeleton, walking with a powered exoskeleton did not reduce the metabolic cost, regardless of whether assistance was provided.
Discussion
The comfort and safety of human beings wearing an exoskeleton is one of the indicators for evaluating the performance of the exoskeleton. The exoskeleton should not limit the freedom of joint movement or hinder the normal movement of the human body. In this study, when the human wore the biarticular knee-ankle exoskeleton, the impact of assistance magnitude on the ankle joint angle was more significant on flat ground and 5° uphill, while it was relatively stable at 5° downhill. This may also be attributed to the fact that human movement is significantly influenced by gravitational potential energy when descending a slope. Additionally, in this study, compared with the level ground and 5° uphill, the exoskeleton assistance magnitude had less impact on the metabolic cost when walking downhill, as shown in Figure 5(c). Studies have shown that compared with walking on level ground, the support moments during walking on uphill and downhill slopes significantly increase. When walking on uphill, the hip extensor moment was mainly increased. When walking on downhill, it mainly originated from the knee extensor moment. 33 It indicated that there were obvious differences in the hip, knee, and ankle moment patterns of the lower limb when walking uphill and downhill and on level ground. The study revealed that compared with level walking, joint moments do not increase uniformly during uphill and downhill walking, and these three gait patterns are not governed by the same control strategy. The single-joint exoskeleton was difficult to meet the assistance needs on different grounds. In the future, it may be possible to develop exoskeleton assistance strategies for adaptive terrain.
In addition to level ground, the ankle plantar flexor muscles play a significant role during uphill walking. The results indicated that although the increase in muscle activity, joint torque, and joint power was primarily concentrated around the hip and knee joints, the contribution of the ankle joint was also notably enhanced.34,35 Sawicki and Ferris developed a pneumatic ankle exoskeleton, and experiments demonstrated that compared to unassisted walking, metabolic cost was reduced by 11% when walking at a speed of 1.25 m/s on a 10% slope (approximately 5.71°), with a metabolic power value of 6.55 ± 0.19 W kg−1.33,36 In this study, compared with walking unpowered exoskeleton, when participants walked uphill at a 5° slope with a speed of 0.6 m/s while wearing the exoskeleton under high-intensity assistance conditions, the metabolic cost was 4.08 ± 1.04 W kg−1, representing a 15% reduction in the metabolic cost. As shown in Figure 5(b), during walking on uphill, the metabolic cost gradually decreased as the assistance amplitude of the ankle exoskeleton increased. This further confirms the effectiveness of the exoskeleton in assisting ankle plantar flexion and validates the practical utility of the biarticular pneumatic knee-ankle exoskeleton in this study.
The triceps surae generates power output through ankle push-off, which effectively reduces energy loss caused by the collision of the leading leg during walking, thereby lowering metabolic energy consumption and showing good gait economy. However, when ankle push-off work decreases, the energy loss during the collision between the leading leg and the ground increases, resulting in a higher metabolic energy expenditure during walking. 37 For assistive exoskeletons, an appropriate assistance magnitude helps reduce metabolic energy expenditure. However, assistance is not necessarily more effective when increased. As explicitly stated in Robertson et al., 38 “more is not always better.” This phenomenon was also observed in the present study. When walking on level ground at 0.2 m/s, as the amplitude of the assistance increased, the metabolic cost tended to first decrease and then increase. Compared with walking unpowered exoskeleton, the metabolic cost under medium-intensity assistance was 2.23 ± 0.47 W kg−1, representing a 22% reduction. In contrast, under high-intensity assistance, the metabolic cost was 3.51 ± 0.49 W kg−1, showing a 23% increase. Therefore, to achieve an optimal assistance effect, it is necessary to accurately select the appropriate assistance mode and determine the appropriate assistance intensity based on specific needs under different walking speeds and motion scenarios. This approach will reduce the metabolic cost more efficiently and significantly improve the economy of the walking gait.
To analyze the potential mechanism of the phenomenon that “higher levels of assistance do not always reduce metabolic costs,” the mismatch of human-exoskeleton system interaction and the disruption of natural muscle coordination were analysis. At the level of human-exoskeleton system interaction mismatch, when the assistive timing, torque magnitude, and force application direction of the exoskeleton do not match the natural movement pattern of the human body, even if the assistance intensity is increased, it will prompt the subjects to consume additional energy to adjust the movement trajectory. 39 When the assistance parameters of the exoskeleton deviate from the human neuro-muscle control logic, the assistance force changes from “energy-saving support” to “motion interference,” and additional metabolic consumption is required to offset the mismatch effect. Furthermore, individual differences may exacerbate the degree of interaction mismatch. When the exoskeleton adopts a high-assistance mode, the mismatch effect is intensified if the user’s muscle coordination specificity is not fully considered. The user must adapt to the exoskeleton structure through neuromuscular regulation (such as adjusting step frequency and length), thereby increasing adaptive effort and metabolic costs. For instance, a latest research 40 published in Nature in 2024 proposed an exoskeleton controller design framework based on learning simulation. This framework bridges the gap between simulation and reality by combining dynamically aware musculoskeletal and exoskeleton models and applying data-driven reinforcement learning methods. It has found that the application of this method can reduce the metabolic energy consumption rate of human walking by 24.3%. In terms of the disruption of natural muscle coordination, the human body has developed an efficient collaborative muscle working mode over a long period of evolution, such as the orderly activation and relaxation of the quadriceps, hamstrings, and gastrocnemius muscles during gait. The high assistance of exoskeletons may disrupt this inherent coordination: on the one hand, the intervention of auxiliary force may inhibit or interfere with the normal activation of core muscles; on the other hand, some muscles need to shift from an “active force” state to a passive state of “resistance/adaptation assistance,” which leads to a decline in muscle synergy efficiency and an increase in metabolic costs. For instance, some studies have found through muscle synergy analysis that there are significant differences in the muscle synergy effect of exoskeletons on patients with multiple sclerosis and stroke. The improvement in walking ability may be attributed to the reduction in the neural activation. 41
In addition, Galle et al. established a functional relationship between metabolic energy consumption and assistance parameters while wearing a single pneumatic muscle-driven ankle exoskeleton. The results showed a binary quadratic functional relationship between assistance timing, assistance magnitude, and metabolic energy consumption. Specifically, when the assistance timing was 42% of the gait cycle and the average sum of the assistance magnitudes for both legs was 0.4 W kg−1, the metabolic cost decreased by 21.4% ± 5.6% compared to the unassisted state. 30 Additionally, Philippe et al. indicated that biarticular knee-ankle-foot exoskeletons are more energy-efficient than mono-articular exoskeletons, with a 12.8% decrease in metabolic energy consumption. 42 In this study, when participants walked on level ground at normal speed while wearing a unilateral knee-ankle exoskeleton with high-intensity assistance, their metabolic energy cost decreased by 21%, demonstrating a similar assistance effect to the findings of Galle et al. Notably, as the participants in this study wore the exoskeleton on only one leg, it can be hypothesized that metabolic energy consumption could be further reduced if both legs were equipped with exoskeletons.
Limitations and future work
The ankle joint is a multi-degree-of-freedom composite joint that plays a crucial role in gait, such as walking, running, and jumping. Based on the synergistic actuation characteristics of the gastrocnemius and soleus muscles, which primarily contribute to ankle push-off, this study presents the design and assistance performance analysis of a biarticular exoskeleton. The experimental results showed that the metabolic cost decreased under specific conditions compared with walking with an unpowered exoskeleton. However, our study had some limitations, such as sample size, driving pressure, and walking speed. The experimental sample size was relatively small, with only two participants. The driving air pressure of the biarticular knee-ankle exoskeleton was set to only 0.3 MPa, limited by the experimental conditions. Additionally, because the participants had no prior experience wearing exoskeletons, the tested walking speed was relatively low.
One of the primary limitations of this study was its inclusion of only two participants. The small sample size may significantly affect the evaluation of metabolic costs and is highly sensitive to the inter-individual differences. Therefore, further discussion on the impact of a limited sample size on research outcomes holds significant value. Firstly, regarding statistical robustness, owing to substantial metabolic variations among individuals, the evaluation of metabolic costs is influenced by physiological characteristics such as age, weight, cardiopulmonary function, energy metabolism efficiency, exercise habits, and gait patterns. Significant inherent differences between individuals lead to insufficient statistical power in small sample sizes, making it difficult to effectively exclude random errors from the results. Consequently, it is challenging to comprehensively reflect the overall conditions, thereby affecting statistical robustness. Secondly, the individual characteristics of small sample sizes cannot represent broader populations or cover various potential influencing factors, making it difficult to generalize the research findings to larger study groups. Both participants in this study were female, which only reflects specific individual response characteristics and cannot support conclusions about group-level metabolic costs, thus affecting the generalization of the results. Finally, owing to the limited sample size, this study could not capture inter-individual heterogeneity in exercise strategies or verify the consistency of the impact of terrain characteristics on metabolic costs across individuals. The interaction between individuals and terrain was not fully reflected in the small sample, resulting in incomplete explanations of the dependence of metabolic cost on terrain and limiting in-depth exploration of regulatory factors under different terrains. In summary, the limited sample size was the primary limitation of this study. The constraints on statistical robustness, result generalization, and interpretation of terrain dependence clarify the applicable boundaries of our findings. Future research will expand the sample size, increase the number of measurement repetitions, and introduce individual characteristic moderators to reduce interference from individual differences. This will further validate the universal patterns of metabolic cost dependence on terrain and provide more reliable theoretical support for applications such as outdoor energy planning and terrain design optimization.
In future work, we will upgrade the exoskeleton and conduct power-assisted performance tests at faster walking speeds. To further improve walking efficiency, the composition and function of the ankle joint must be understood in exoskeleton design. As one of the complex joints of the human body, the ankle joint directly interacts with the ground, and its remarkable adaptability to complex terrains deserves attention. The subtalar joints are responsible for the varus, valgus, and rotational movements of the ankle joint, which help maintain balance when walking on uneven ground and are an important part of the exoskeleton that assists the body in walking. 43 We could consider increasing the degree of freedom of the pneumatic ankle exoskeleton to assist ankle movement in multiple degrees of freedom, thereby enhancing the adaptability of the ankle exoskeleton to complex terrain. The subtalar joint is responsible for the rotation of the inversion and eversion of the ankle joint, enabling balanced walking in humans and aiding in balance maintenance when walking on uneven surfaces. It is a crucial component of balance training during exoskeleton-assisted walking. 43 Future designs should consider increasing the degrees of freedom in pneumatic ankle exoskeletons to assist ankle movements across multiple axes, thereby enhancing their adaptability to complex terrains. To enhance the adaptability of biarticular knee-ankle exoskeletons across diverse terrains, future work may involve the design of an adaptive control system by referring to human-machine collaborative multi-level and multimodal control strategies and related algorithms.44,45 This approach addresses the body’s adaptive assistance needs on various surfaces, including level ground, slopes, and stairs, aiming to reduce metabolic energy costs while significantly improving walking gait economy and efficiency.
Conclusions
In this study, a biarticular knee-ankle exoskeleton driven by pneumatic artificial muscles was designed and manufactured by mimicking the biomechanical characteristics of synergistic actuation in the gastrocnemius and soleus muscles of human beings. Using the portable metabolic respiratory analyzer K5, researchers analyzed the metabolic cost of two participants with powered and unpowered exoskeletons under different assistance magnitudes across various terrains and walking speeds. The results showed that compared to walking with an unpowered exoskeleton, when walking at 0.2 m/s on level ground, medium-intensity assistance reduced the metabolic cost by up to approximately 22%, and the corresponding value was approximately 2.23 ± 0.47 W kg−1. When walking rapidly on the 5° uphill terrain, the metabolic cost under high-intensity assistance was 4.08 ± 1.04 W kg−1, resulting in a 15% reduction. When walking rapidly on the 5° downhill terrain, the corresponding metabolic cost under medium-intensity assistance was 2.21 ± 0.45 W kg−1, a decrease of approximately 3%. The study also found that on level ground, selecting appropriate assistance magnitudes proved more effective for reducing metabolic cost, whereas greater assistance magnitudes appeared more beneficial for uphill walking. When walking on downhill terrain at different speeds, the metabolic cost varies slightly regardless of the assistance magnitude and whether the exoskeleton is powered on or off.
Footnotes
Handling Editor: Aarthy Esakkiappan
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported in part by the National Natural Science Foundation of China (No. 52405328) and Youth Independent Innovation Science Foundation Supporting Project of the Chinese People’s Liberation Army General Hospital (No. 22QNFC122).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.