
Abstract
An improved extended state observer is designed to eliminate the influences of speed control for a permanent magnet synchronous motor. The improved extended state observer is designed based on a new nonlinear function. This function exhibits better continuity and derivability than previously available functions and can effectively reduce the high-frequency flutter phenomenon. The nonlinear dynamics, model uncertainty, and external disturbances of the permanent magnet synchronous motor speed control system are extended to a new state. The improved extended state observer is utilized to observe this state. The overtime variation of the permanent magnet synchronous motor speed control system can be predicted and compensated in real time by the improved extended state observer. Therefore, the improved extended state observer, which is designed based on the new nonlinear function, can eliminate the disturbances on the permanent magnet synchronous motor speed control system. Finally, simulation experiments are performed and results show that the permanent magnet synchronous motor speed control system with improved extended state observer exhibits better performances.
Keywords
Introduction
Speed control of the permanent magnet synchronous motor (PMSM) is the core of the PMSM control system. Controlling the speed of PMSM is conducted under complicated industrial situations. Therefore, small interferences will result in serious errors. Thus, the control system needs a control strategy with stronger anti-interference ability. The control strategy based on an improved extended state observer (ESO) does not depend on the precise model of a control object, and the disturbances of the system can be eliminated in real time by the improved ESO. Moreover, the control quantity can be compensated for promptly. Therefore, this control strategy has a stronger anti-interference ability. The control strategy based on the improved ESO, which was proposed by Han, 1 was used in this study.
Extensive research on the control strategy based on ESO for PMSM speed control has been conducted locally and internationally, and the research has demonstrated several achievements. For example, Hebertt et al. 2 presented an ESO for the angular velocity trajectory tracking task on a substantially perturbed PMSM and disturbances, such as time variations, the presence of unknown, load-torque inputs, and unknown system parameters were observed. Du et al. 3 applied a linear active disturbance rejection controller based on ESO for sensorless control of internal PMSM. The high performance of position estimation was achieved using line ESOs. Compared to a conventional sliding-model observer, the phase delay and speed chattering were obviously reduced. A sensorless estimator based on the technique of the ESO is constructed to create rapid and accurate speed identification. 4 Liu and Li 5 developed an improved speed control method, called the predictive functional control (PFC)+ESO method, to optimize the control performance of the PMSM. In the improved speed control method, ESO is introduced to estimate lumped disturbances and add a feed-forward compensation item based on the estimated disturbances to the controller. A composite control method, that is, the extended-state-observer-based control method, is employed to ensure the performance of the PMSM closed-loop system. The ESO can estimate both the states and the disturbances simultaneously, so the composite speed controller can use a corresponding part to compensate for the disturbances. 6 A sliding mode and active disturbance rejection control based on ESO was employed to regulate the speed of a PMSM. This proposed control scheme ensures speed control accuracy and improves the robustness and anti-load disturbance ability of the system. 7 However, noise of the speed control for PMSM was not eliminated sufficiently when the differentiation was estimated. Some ESO performances, such as the frequency-domain performance, the measurement noise restrain performance, and the absolute stability, were studied and analyzed.8–14 However, the parameters of the studied ESO were extensive to set; they did not provide specific setting rules. Furthermore, ESO is widely used in many industrial occasions. For instance, Kang et al. 15 proposed a robust tracking controller for a wheeled mobile robot with unknown skidding and slipping, and the controller was designed based on a generalized ESO. Mokhtari et al. 16 used an ESO to estimate the state and the unknown aerodynamic disturbances of a coaxial-rotor unmanned aerial vehicle. Ma et al. 17 proposed an ESO according to the slow convergence and control input chattering phenomenon in traditional nonsingular terminal sliding mode control. Cai et al. 18 designed an ESO based on the back-stepping theory to enhance the control ability of rotor current and the fault ride-through capacity of a doubly-fed induction generator. Guo and colleagues19,20 designed a fuzzy active disturbance rejection controller based on ESO and improved the performances of a system. A weight-transducerless rollback mitigation strategy, which adopts an enhanced model predictive control with ESO for speed-loop, was proposed to attenuate the car sliding of the gearless elevator installed with an ordinary resolution encoder. 21 Yang et al. 22 designed an ESO control scheme and used it on the trajectory tracking. An active disturbance rejection controller with an adaptive ESO was adopted in air–fuel ratio control in gasoline engines. 23 A high-order ESO-enhanced controller was proposed to address the problem of velocity and altitude tracking for a hypersonic flight vehicle with strong nonlinearity, parameter uncertainty, and external disturbance. 24 Sun et al. 25 used an ESO applied to the fast terminal sliding mode control for swing nozzle of anti-aircraft missile. Luis et al. 26 described an adaptive control design based on ESO to solve the trajectory tracking problem of a Delta robot with uncertain dynamical model. Zhu et al. 27 used ESO to estimate the external disturbances and uncertain items of the model of airship horizontal model, and the dynamic feedback was compensated in real time. An adaptive ESO-based active disturbance rejection control was proposed to address the uncertainties, both in the plant and in the sensors. 23 However, the ESO used in the aforementioned works was traditional one and was designed based on a nonlinear function fal. The traditional ESO cannot effectively eliminate the high-frequency flutter of a system because the nonlinear function is ideal. The function is continuous but non-derivable. Therefore, designing an improved ESO based on a new nonlinear function is crucial to eliminate the high-frequency flutter of the system.
This study proposes an improved ESO based on a new nonlinear function, and a control strategy based on the improved ESO is designed. The control strategy is applied to the speed control system of the PMSM. Simulations are conducted in the PMSM control system for the cases that adopts proportional–integral (PI), traditional ESO, and the improved ESO control strategy. Finally, the simulation results are discussed.
Control model
The schematic diagram of the mathematical model of PMSM is shown in Figure 1.
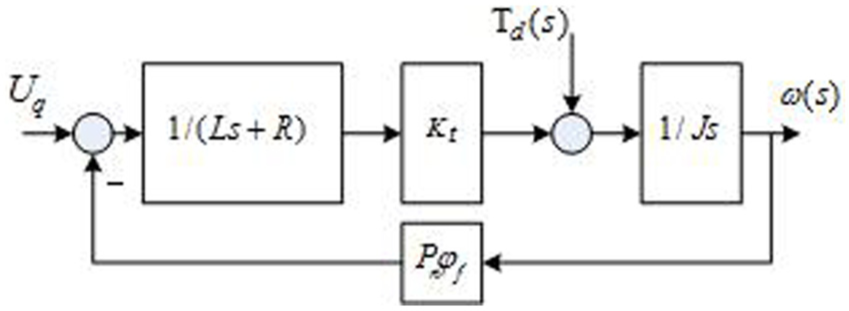
Mathematical model schematic diagram of PMSM.
In the model,
The transfer function between

The following equation can be obtained by equation (1)

where
Several definitions are given as
Equation (3) can be obtained according to the expression of

Equation (4) can be obtained by equation (3)

where
Design of improved ESO for PMSM
Improved ESO design
The design of the improved ESO for the PMSM speed control can be performed by equation (4).
Assuming that

where f is regarded as the disturbance of the system, and the definition

The improved ESO of the PMSM speed control system can be designed as follows
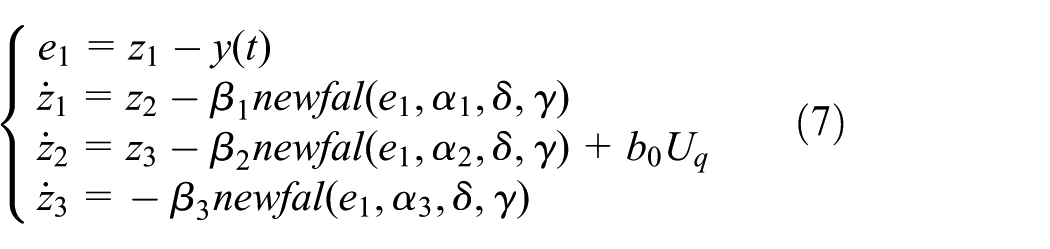
where
A proportion differentiation (PD) controller and a compensation device of the total disturbance is designed as follows

where v is the given signal.

Structure chart of controller based on improved ESO for PMSM speed control system.
Calculation of nonlinear function for improved ESO
The calculation of the nonlinear function is the core of the improved ESO design. The nonlinear function was first calculated as a

The expression of the

The

Given that
Simulations are performed on the three nonlinear functions, and results demonstrate that the
Convergence and absolute stability analysis
Convergence analysis
The nonlinear parts of the improved ESO are divided into many areas to analyze the convergence of the improved ESO. All areas are replaced by piecewise linear functions. The convergence of the entire area can be ensured when the convergence of each area is ensured. This study used the linear expression
In this paper, h is defined as the bandwidth of system. The relationship between β1,β2,β3 and h is expressed as β1 = 3h, β2 = 3h2, β3 = h3. Therefore, the following expressions can be obtained.

The errors are defined as follows


The following expressions can be obtained as follows

This study selected y and

Therefore, the improved ESO has good convergence and estimating ability.
Absolute stability analysis
In the rotor reference frame, speed-loop model of PMSM can also be expressed as follows

where B is the friction coefficient,

The ESO of speed-loop control system can be designed as follows

The compensation device is designed as follows

where
While ignoring the total disturbance influence, the following expression can be obtained by equations (19) and (21)

Some definitions are given such that
The following expression can be obtained by equations (20) and (21)

Some definitions are given such that
According to equations (22) and (23), the following expression can be obtained
Some definitions are given such that

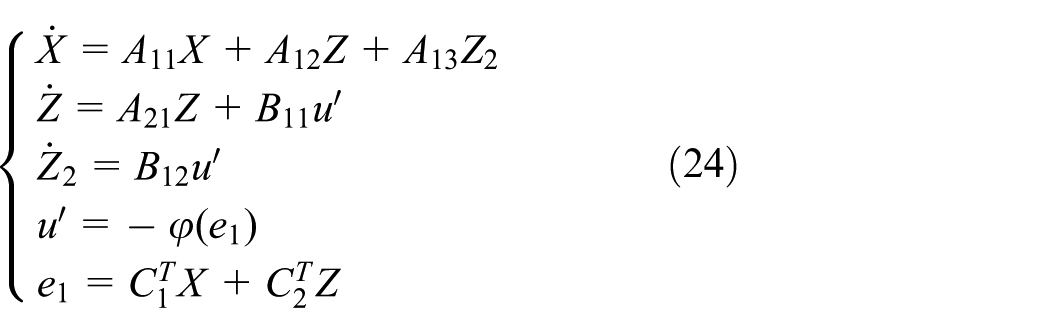
The Lurie system general expression for equation (25) is as follows

where
The entire principle diagram of the PMSM speed control system based on the improved ESO is shown in Figure 3.

Principle diagram of the PMSM speed control system based on improved ESO.
Simulation experiments and discussions
This section conducts simulation experiments based on the PI control strategy, a traditional ESO control strategy, and the improved ESO control strategy. The improved ESO is designed based on the new nonlinear function newfal, and the traditional ESO is designed based on the traditional nonlinear function fal. The parameters of the experiment PMSM are given in Table 1. The parameters of the traditional ESO and the improved ESO are the same parameters, which are given in Table 2.
Parameters of experiment PMSM.

Parameters of ESO.

First, simulations are performed to verify the performance of the improved ESO. The input current is chosen as

Tracking curves of improved ESO.
Second, simulations are performed when the PMSM starts without load. Three given speeds of 1, 1000, and 2750 r/min are applied on the PMSM at 0 s, respectively. The speed response curves are shown in Figure 5. The figure shows that the improved ESO control strategy has a shorter adjustment time and smaller overshoot amount than the PI control strategy and the traditional ESO control strategy. Figure 5(a) demonstrates that the overshoot amount of the improved ESO control strategy is 9.92% less than that of the traditional ESO control strategy and 14.89% less than that of the PI control strategy.

Speed response curves in the case that PMSM starts without load.
Third, simulations are conducted when external load disturbance is suddenly applied on the PMSM. The speed response curves are shown in Figure 6. In Figure 6(a)–(c), the initial speeds of the PMSM are 1, 1000, and 2750 r/min. At 5 and 2 s, three different external load disturbances of 0.5, 200, and 1500 r/min are applied on the PMSM, respectively. The simulation results demonstrate that the improved ESO control strategy has smaller response curve fluctuation, shorter recovery time, and smaller load disturbance influence than the traditional ESO control strategy and the PI control strategy. Figure 6(a) demonstrates that the overshoot amount of the improved ESO control strategy is 8.62% less than that of the traditional ESO control strategy and 10.21% less than that of the PI control strategy. The recovery time of the improved ESO control strategy is 1.23 s less than that of the traditional ESO control strategy and 2.65 s less than that of the PI control strategy.
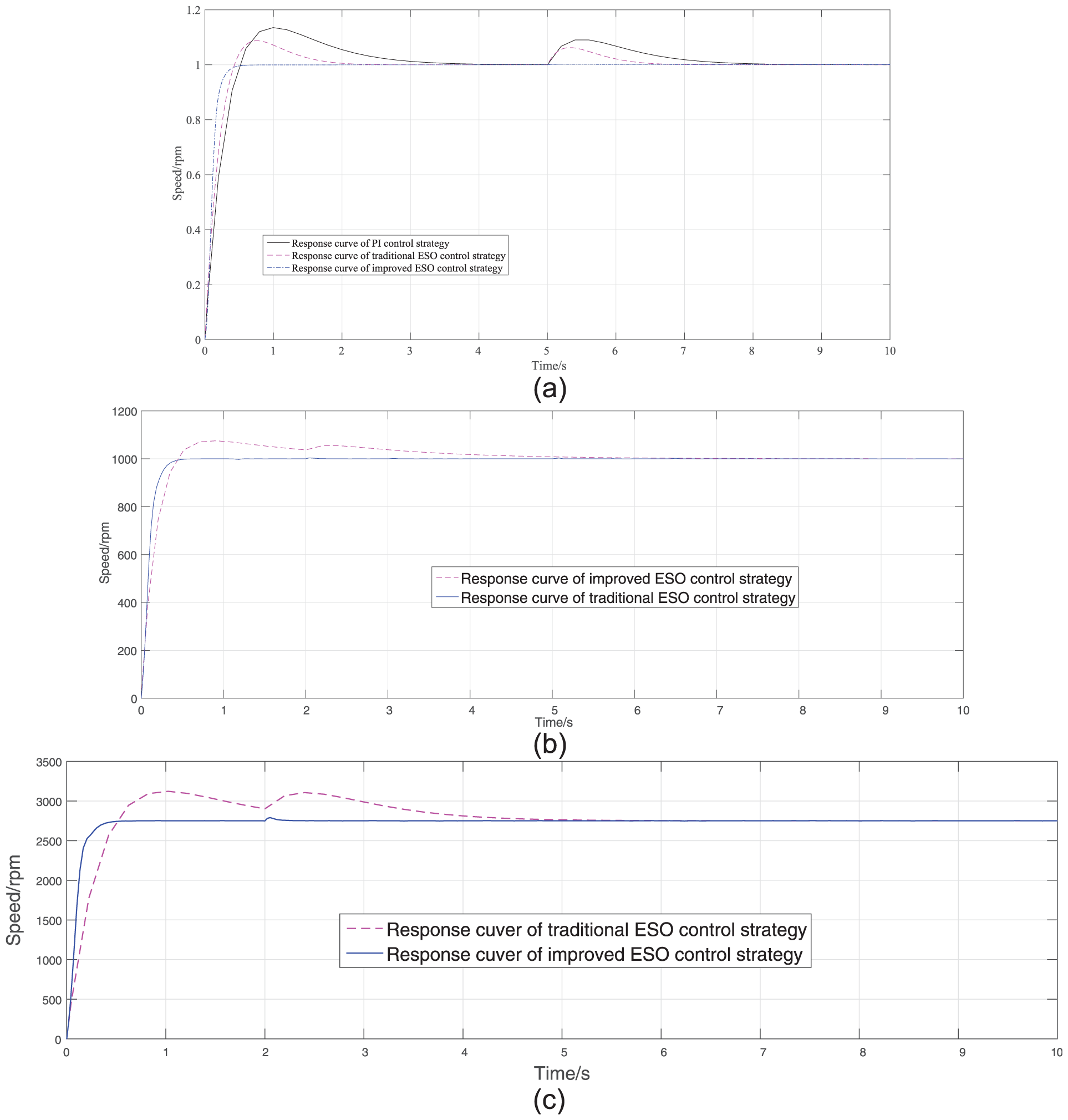
Speed response curves in the case that external load disturbance is suddenly applied on PMSM.
Fourth, simulations are conducted when the PMSM speed changes suddenly. The initial PMSM speed is 1 r/min, which decreases to 0.5 r/min at 5 s. The speed response curves are shown in Figure 7. The figure shows that the improved ESO control strategy has smaller response curve fluctuations and a better recovery capability than the traditional ESO control strategy and the PI control strategy when the PMSM speed changes suddenly. The simulation results demonstrate that the amount of overshoot of the improved ESO control strategy is 9.13% less than that of the traditional ESO control strategy and 14.58% less than that of the PI control strategy. The response time of the improved ESO control strategy is 1.63 s less than that of the traditional ESO control strategy and 2.87 s less than that of the PI control strategy.

Speed response curves in the case that PMSM speed changes suddenly.
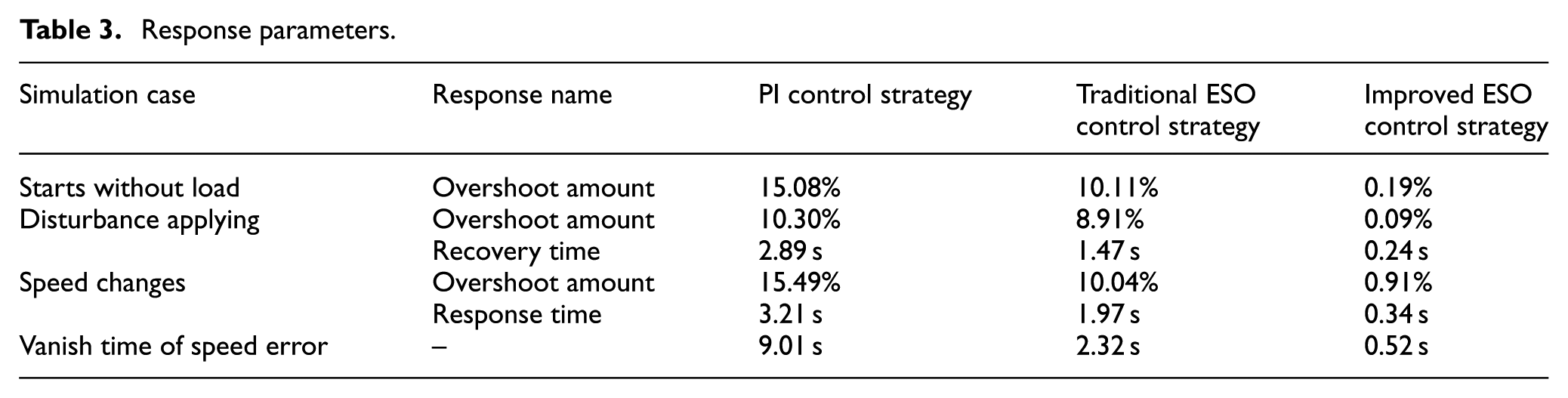
Fifth, simulations are performed for the speed error. The speed error response curves are shown in Figure 8. The figure shows that the improved ESO control strategy has shorter error vanish time than the traditional ESO control strategy and the PI control strategy. The simulation results demonstrate that the error vanish time of the improved ESO control strategy is 1.80 s less than that of the traditional ESO control strategy and 8.49 s less than that of the PI control strategy. The detailed parameters for the above-mentioned four simulation cases are presented in Table 3.

Response curves of speed error.
Response parameters.
Finally, a white noise signal is applied on the PI control strategy, traditional ESO control strategy, and improved ESO control strategy to verify their elimination capacity for the measurement noise, respectively. The input signal is chosen as step signal,
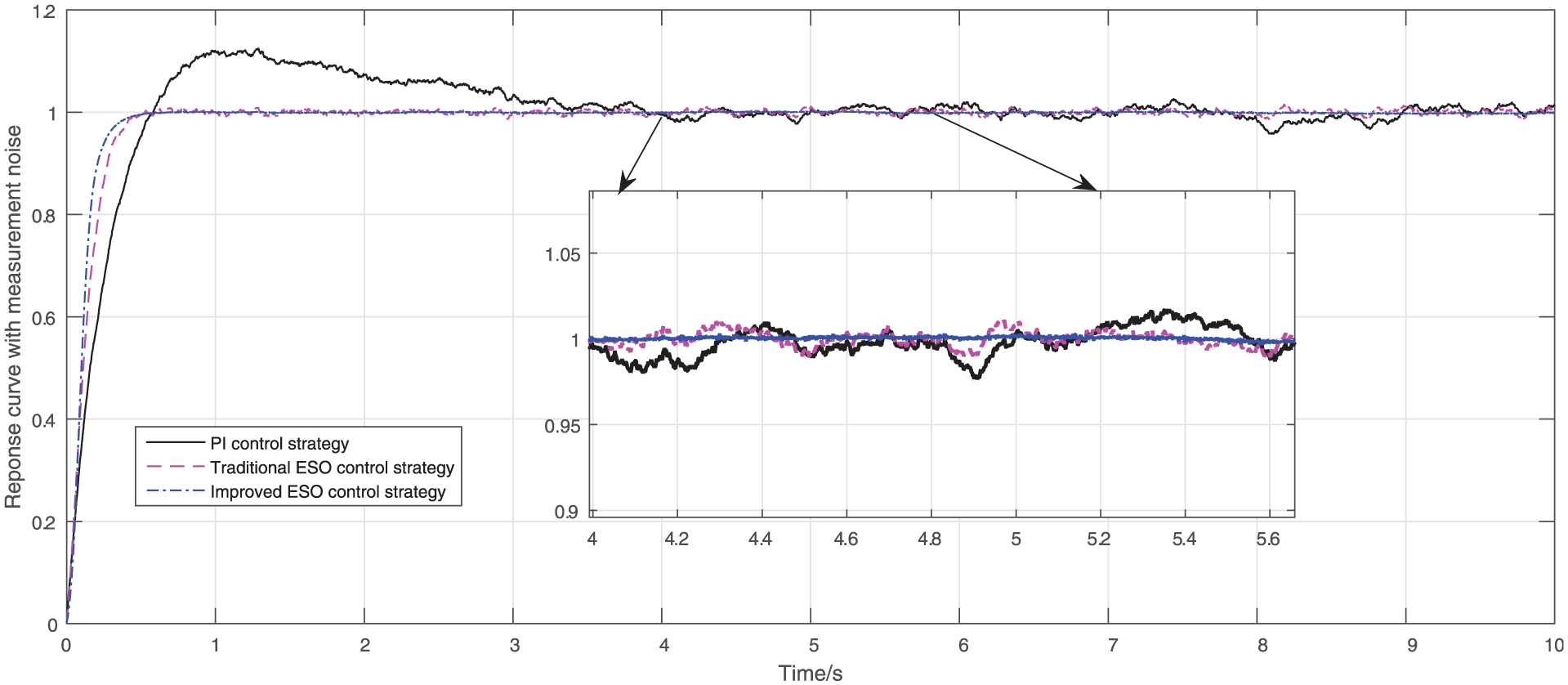
Output of PI control strategy, traditional ESO control strategy and improved ESO control strategy with white noise.
Conclusion
This study introduces an improved ESO control strategy for PMSM speed control based on a new nonlinear function. The non-differentiable and discontinuous characteristics of the nonlinear function of the traditional ESO nonlinear state error feedback are addressed using the improved ESO. The high-frequency flutter phenomenon is reduced significantly. Simulations were performed, and the results indicate that the system with the improved ESO control strategy exhibits better dynamic performance, static performance, and robustness than the system with the traditional ESO control strategy or PI control strategy. In future studies, the proposed design technique will be extended to the improved ESO control strategy of current and position controls.
Footnotes
Appendix 1
Acknowledgements
The author is grateful to the anonymous reviewers for their helpful comments.
Handling Editor: Ivo Bukovský
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by the Key Project of Natural Science by Education Department of Anhui Province (grant no. KJ2015A316) and Open Research Fund of Anhui Province Key Laboratory of Detection Technology and Energy Saving Devices (grant no. 2017070503B026-A02).