
Abstract
Magnetic levitation planar motor has the characteristics of no friction loss, fast dynamic response, and real-time change of transportation track according to the demand. Therefore, a kind of magnetic levitation planar motor based on logistics transportation system is designed, which can meet the transportation needs of the logistics system through any combination of unit modules. Firstly, based on the mechanical model of magnetic levitation float in Halbach permanent magnet array magnetic field, establishing the thrust and torque model of maglev float. Secondly, according to the force/current relationship, considering the influence of uncertain parameters and load disturbance on the system, the decoupling control model of six degree of freedom motion system of magnetic levitation planar motor is established. Thirdly the adaptive contraction backstepping (ACB) controller is derived that can eliminate the uncertain disturbance of the nonlinear model and realize the real-time control of the system. The simulation and experimental results demonstrate that the method has expected response speed, strong robustness, and good dynamic tracking performance. Applying it to the logistics transportation system described in this article and has a good control effect.
Keywords
Introduction
Modern logistics plays a significant role in regional economic development. With the development of modernization and intelligent technology, the field of logistics transmission is changing. For example, the Production and Logistics Research Institute (BIBA) of the University of Bremen in Germany invented the modular universal cell conveyor belt “Celluveyor.” Its basic module was a logistics transmission unit composed of a regular hexagon, which could be combined arbitrarily according to the needs. The system controlled the rotation speed and direction of each module could transfer the goods according to the expected trajectory. However, Celluveyor has vibration problems when transporting goods, and cannot transport irregular or fragile items. Magnetic levitation planar motor (MLPM) has the advantages of no friction loss, fast dynamic response, and good stability.1,2 Its combination has the characteristics of Celluveyor, faster speed, and lower energy consumption. 3 It can transfer irregular or fragile items. In this device, each magnetic levitation planar motor is a unit module. Through the arbitrary combination of modules, it can realize the transportation requirements under different working conditions. This modular, decentralized integration new logistics system is the development direction of modern logistics transmission technology.
Applying MLPM in the field of logistics transportation has higher requirements for its control rapidity and stability. Lin designed the conventional PID control algorithm to the maglev control, the system response speed was not ideal, and the float could not achieve rapid levitation. Besides, the system had weak robustness. When the internal parameter perturbation or external interference, the system state would deviate from the equilibrium point.4,5 Kou used ADRC to estimate the comprehensive disturbance of the system and compensate for the system in time. Compared with PID control, ADRC had good dynamic and robustness in a wide speed range. 6 Huang et al. 7 introduced the linearized feedback robust controller into the electromagnetic levitation system to ensure stability. However, the results showed that there were large overshoots and oscillations in the transient response of the system, which made it hard to implement in the real-time control of the magnetic levitation device.8–11 Zhang linearized the maglev system at the equilibrium point. Designed an adaptive sliding mode controller with an integral sliding mode surface to realize the tracking of square wave and sine wave signal.11,12
The above methods are hard to meet the requirements of dynamic and steady-state performance of the logistics transmission system under time-varying conditions. The backstepping design method 13 is a method of system identification and model building, which has nice rapidity,14,15 no overshoot under ideal conditions, and meets the requirements of system dynamics.16–18 Besides, the integration of backstepping control and contraction control does not need to linearize the system at the equilibrium point, which is helping solve the modeling problem when the system parameters are not clear.
In this article, the thrust and torque model of the magnetic levitation planar motor is established to realize the decoupling of control variables with six degrees of freedom. Based on the force characteristics of the maglev float, the decoupling control model of the magnetic levitation planar motor is established considering the uncertain parameters of the model, and the external load disturbance. An adaptive contraction backstepping (ACB) controller for the MLPM decoupling model is designed. The method can realize the adaptive motion control of the magnetic levitation planar motor. The simulation results demonstrate that this method has expected response speed, strong robustness, and good dynamic tracking ability.
Structure and system modeling of magnetic levitation planar motor
Principle of magnetic levitation planar motor
The moving coil MLPM studied in this article consists of stator and float. 19 The MLPM structure is shown in Figure 1. The float is a moving coil structure, which is composed of four coil groups. 20 The coil group consists of three coils. The two-dimensional Halbach permanent magnet array can provide three-dimensional distribution of the magnetic field. The two-dimensional Halbach magnetic array is composed of main magnetic steel and secondary magnetic steel. 21 The main magnetic steel is square, and the secondary magnetic steel is rectangular.22,23 The magnetization direction is parallel to the horizontal planar. The thickness of the main magnetic steel and the auxiliary magnetic steel is the same. The magnetization intensity is identical, and the magnetization is uniform. 24 The electrified coil in the magnetic field can generate both vertical and horizontal electromagnetic forces. Providing the levitation and driving force of the magnetic levitation planar motor.
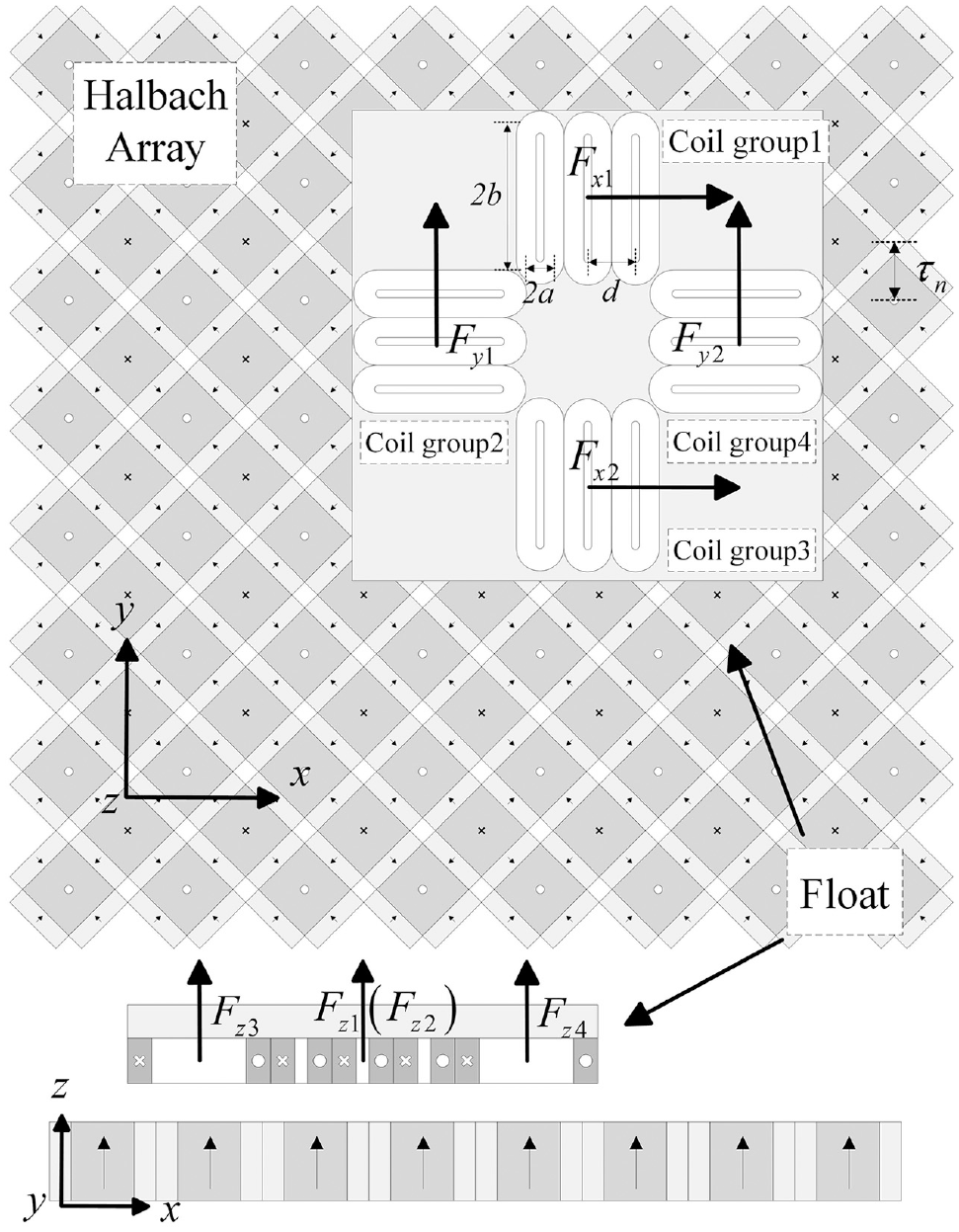
Structure of magnetic levitation planar motor.
In Figure 1, the width and length of coils are defined as 2a and 2b. The polar distance of the Halbach magnetic array is defined as
Mathematical model of magnetic levitation planar motor
The mathematical model of MLPM is established by using the coil group as the basic driving unit. The spatial magnetic induction

Where Bx, By, and Bz are the flux components along the three directions of x, y, and z. B0 is the effective amplitude of the first harmonic of the flux density when z = 0, and
Where

Fx 1, Fy1, and Fz1 are the thrust of coil group 1, and KFx is the thrust influence coefficient considering the characteristics of coil diameter, thickness, and other factors, d is the center distance between two adjacent coils. The torque of the coil group in the Halbach permanent magnet array can be described as follows:



Where Tx1, Ty1, and Tz1 are the torque of coil group 1, and KTx and KTa represent the torque influence coefficient considering the characteristics of coil diameter, thickness, and other factors.
Application of magnetic levitation planar motor in logistics transmission
Celluveyor has vibration during transportation and cannot transfer fragile goods. At the same time, the design of the conveyor belt makes it impossible to transport irregular shaped goods. MLPM has no appeal problem, and the block design enables it to transport irregular shaped goods through arbitrary combination behavior, as shown in Figure 2.

Planar motor transport irregular and fragile goods.
The float driven by the current has a fast response speed. Through the reasonable distribution of force and current, each MLPM can realize 6-DOF motion. The upper computer takes MLPM as the smallest module, which can meet the requirements of high-precision transportation of modern logistics. Three MLPM cooperative movement as shown in Figure 3. Because MLPM is independent of each other, the next design takes one MLPM as the research object.

Three MLPM cooperative movement.
Force/current model of magnetic levitation planar motor
As shown in Figure 1, coil groups 1 and 3 provide x-direction thrust components, coil groups 2 and 4 provide y-direction thrust components. All four coil groups can provide the z-axis vertical thrust components. The coil group of the float is taken as the driving unit, and the resultant force of z-axis is expressed as Fz = Fz1 + Fz2 + Fz3 + Fz4, the resultant force of the x-axis and y-axis is expressed as Fx = Fx1 + Fx2, Fy = Fy1 + Fy2, the coil torque is expressed as Tz = −lx1Fx1 − ly2Fy2 + lx3Fx3 + ly4Fy4, Tx = lx1Fx1 + lx2Fx2 − lx3Fx3 − ly4Fy4, Ty = −ly1Fy1 + ly2Fy2 +lx3Fx3 − ly4Fy4. Where Fx, Fy, Fz, Tx, Ty, Tz are the thrust and torque of the whole float, lx, ly represents the x-direction force arm and y-direction force arm from the action point of each thrust component to the mass center of the float.
After determining the thrust distribution method of the coil group, the current is applied to each coil to obtain the required thrust component. The current distribution method is related to two parameters, one is the number of coils in the coil group, which is defined as N, and the other is the center distance d of two adjacent coils in the coil group. The principle of the force/current model in the x-axis direction is the same as that in the y-axis direction. The electromagnetic force direction is different. Therefore, the x-axis is taken as an example for illustration.
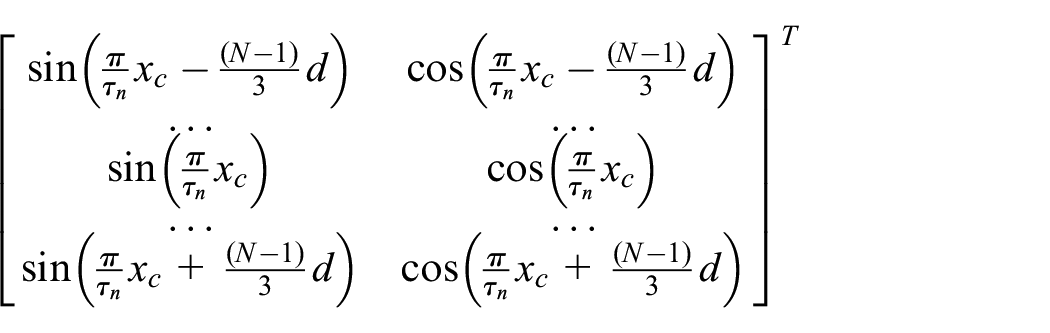
As shown in Figure 4, set the center position coordinate of the central coil in the coil group as (xc, yc, zc), and use this to represent the position of the coil group in the global coordinate system. Coil group 1 with N coils, N is odd. The position coordinates of each coil in the coil group are (xc, yc, zc), (xc + d, yc, zc), and (xc + (N − 1) d, yc, zc).
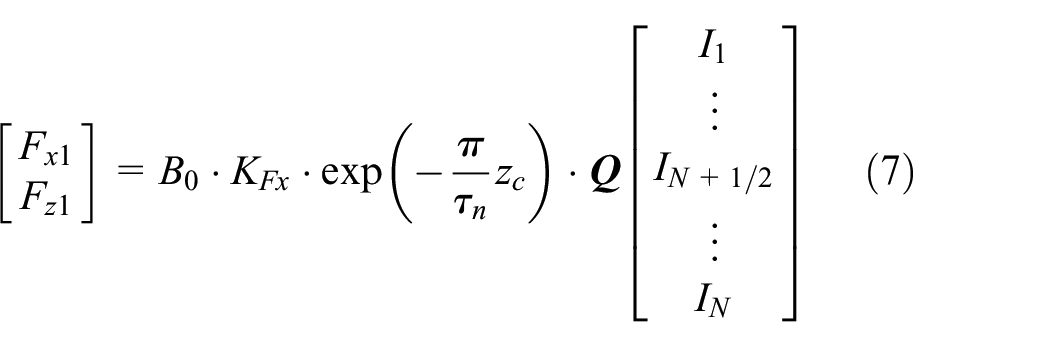
Where I1, I2, and IN represent the current applied to the coil in the group, with the same amplitude. Fx1 and Fz1 are the thrust components of the x and z axes provided by the coil group.

Structure diagram of the coil group.
The equivalent current matrix required for thrust is as follows:
Iq and Id are the equivalent current required to provide horizontal thrust component and vertical thrust component. Iq is called quadrature axis current, and Id is called direct axis current. Taking d as

Coil group 1 produces a horizontal thrust Fx1 along the x-axis. The torque Ty1 around the y-axis and Tz1 around the z-axis generated by distributed force on coil group 1 are not zero. When coil group 1 produces levitation force along the z-axis
Then the levitation force Fz1 in the vertical direction along the z-axis produced by coil group 1. The torque Tx1 around the x-axis and the torque Ty1 around the y-axis generated by the distributed force on coil group 1 are not zero.
Besides, if the horizontal thrust of coil groups 1 and 3 along the x and y axes are equal and opposite, they cancel each other. The torque around the x-axis and y-axis produced by the two groups of coils is zero, and the torque around the z-axis is the same and overlapped. At this time, the torque around the z-axis produced by two groups of coils is zero, and the torque around the y-axis and z-axis is zero by making the levitation force of coil groups 1 and 3 equal in the vertical direction of the y-axis and z-axis. The torque around the x-axis is the same and overlapped with each other. The float produces the torque around the x-axis.
Adaptive contraction backstepping control of magnetic levitation planar motor
Dynamic model of magnetic levitation planar motor
In addition to gravity, the force exerted on MLPM float includes the electromagnetic force between the permanent magnet array and the floating coil. The rigid disturbance is attributed to the load change, and the flexible perturbation is reduced to the damping term. The motion controller can suppress the disturbance force. In the process of establishing the MLPM dynamic model, the influence of gravity, and electromagnetic force on the system is considered. The dynamic model is

Where Fx, Fy, Fz, Tx, Ty, and Tz represent thrust and electromagnetic torque, hx, hy, hz, htx, hty, and htz represent the load force generated by rigid disturbance, m represents the mass of the float. Jx, Jy, and Jz represents the moment of inertia of the float around each rotation axis. x, y, z represents the translational displacement of the float in all directions.
Based on the dynamic model and formulae (3)–(6) of MLPM, establish the equation of the magnetic levitation planar motor.
Where
Design of adaptive contraction backstepping controller for MLPM
Basic principle of contraction theory
Consider the smooth nonlinear system as

The exponential convergence of the trajectory of state x with time can be analyzed by virtual displacement.
26
The virtual displacement represents the linear minuteness increment between two points at the same time in space, denoted as

Perform the state-dependent coordinate transformation in equation (14),

Where

The rate of change of the distance over time can be expressed as

Where

Where
The matrix measure to determine the contraction of the system is

If we define the distance

In the contraction analysis of the second-order closed-loop system, the fictitious displacement with layered connection can be expressed by equation (8). When

The control of x, y, z axes, and
Design of contraction backstepping controller
According to the dynamic equation of z-axis in formula (12)

Define the state variable as

Where
(1) The tracking error is defined as

The exponential convergence of the trajectory of state x1 with time is analyzed by virtual displacement. The virtual displacement represents the linear minuteness increment between two points at the same time in space, denoted as

The Jacobian matrix can be expressed as

To make the first subsystem contract to x1, that is, the Jacobian matrix

Therefore, the differential form of tracking error can be written as

(2) After deriving the auxiliary variable xs, get the formulae (25) and (26)

For the contraction backstepping control system, the virtual displacement state-space form of equations (27) and (28) can be expressed as

Let Jacobian matrix

(3) To ensure that xs can contract, the actual control value u can be designed as follows:

The control variable u is brought into (27) to make the eigenvalue
Design of adaptive contraction backstepping controller
In practical application, should not ignore the load disturbance and the uncertain parameters of the magnetic levitation planar motor. Therefore, it is classified as a disturbance term. The adaptive term is added to the control rate to eliminate it.
(1) Consider the dynamic model with disturbance and uncertain parameters

Where r is an uncertain parameter and q is a smooth bounded function.
(2) Consider that xt is the actual error value including uncertain parameters, expressed as
(3) Based on the contraction backstepping (CB) method, an adaptive controller is designed

Where

Where xs is considered to be the error reference value close to 0, so there is

Therefore,
Finally, the MLPM system model with uncertain parameters derived from the z-axis is

The state variable is extended to the input control of x, y, z, axes, and

Define the control quantity as

Uncertain parameters are updated to

Finally, as shown in Figure 5, considering the nonlinear motion model of magnetic levitation planar motor with uncertain parameters applied to logistics devices, the adaptive contraction backstepping (ACB) controller designed in this article can be described as follows:


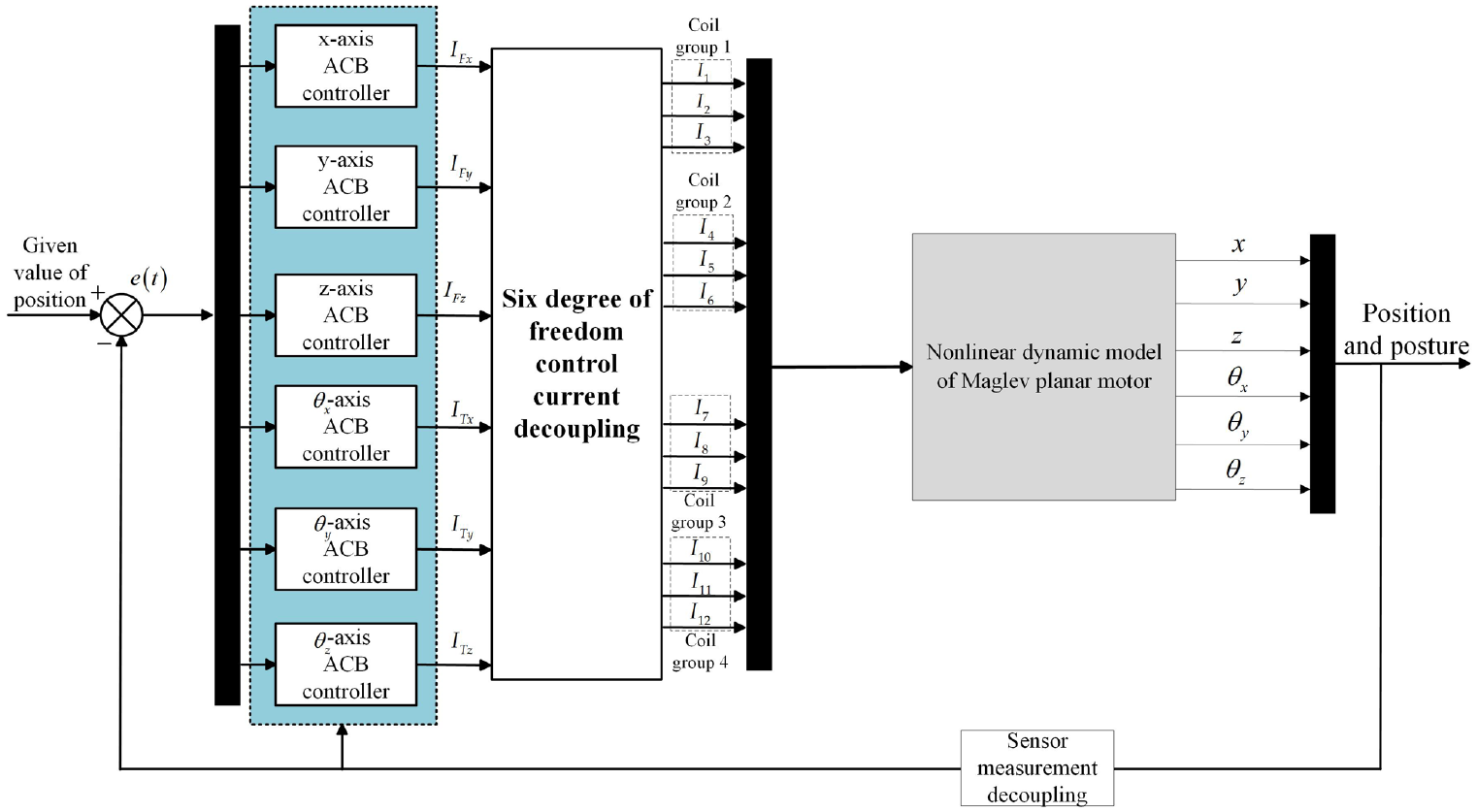
Decoupling block diagram of 6-DOF planar motor control.
Experimental verification
The correctness of the adaptive contraction backstepping controller is verified on the MATLAB software experimental platform. Simulate the start-up process, the initial state of the z-axis is set to 0, and the z-axis stable height is set to a fixed height of 5 mm. For the expected trajectory of the x-axis and rotation angle, due to the similarity of control, the horizontal motion and angular motion of the x-axis are carried out verification. 30 Figure 5 shows the z-direction closed-loop control model of MLPM.
The simulation experiment of the planar motor is shown in Figure 6. The parameters of the experimental platform are shown in Table 1.

Magnetic levitation control system based on adaptive contraction backstepping controller.
Parameters of magnetic levitation planar motor.

As shown in Figure 7 that when MLPM model parameters are uncertain, the stability time of traditional PID is 0.0043 s and the overshoot reaches 24%. The stability time of the ACB controller is 0.0025 s, which finally stabilizes at 5 mm without static error and overshoot. When 0.025 s, the system is subject to 10% external disturbance, and the fluctuation is 1 mm. The traditional PID controller is stable after 0.002 s, while the ACB controller is 0.0015 s stable, and its control performance is close to the ideal backstepping control.

(a) PID control z-axis height and (b) ACB control z-axis height.
Therefore, when the ACB control algorithm is used, MLPM can start quickly, track the desired trajectory state, and the change is kept in a small range. When the disturbance occurs in 0.025 s, the system has good anti disturbance ability. But the PID control algorithm has a general effect, with certain overshoot and response speed has a gap with ACB algorithm.
As shown in Figure 2, each MLPM can be suspended at a specific height when the logistics transmission system designed in this paper is used to lift the goods. The levitation height of MLPM1 is 6 mm, that of MLPM2 is 8 mm, and that of MLPM3 is 7 mm. The lifting time is 0.025 s. This working model can transport fragile and irregular shaped goods. It can be seen from the simulation Figure 8 that compared with the PID controller, the response speed under ACB control is fast, and the vibration suppression effect is good.

(a) PID controls three MLPM to lift irregular shaped goods and (b) ACB controls three MLPM to lift irregular shaped goods.
According to the comparison in Figure 9, the overshoot of the traditional PID controller for x-axis displacement and rotation radian is 25% and 28%, and the stabilization time is 0.0035 and 0.004 s. The stability time of the ACB controller is 0.002 and 0.018 s. Finally, it is stabilized at 5 mm and 1.5 mrad. At 0.015 s, adding the sine wave disturbance with the amplitude of 10% for 0.02 s, it can be seen that ACB in Figure 8 has a better suppression effect. ACB controller has better tracking performance, which can make the x-axis trajectory follow the desired trajectory. Its control performance is close to the ideal backstepping control and retains the nonlinearity of the system. The adaptive term has a good suppression effect on the uncertain parameters of the system. The tracking performance of traditional PID control is not as good as the ACB designed in this article, and its stability is poor.

(a) x-Axis displacement and x-axis displacement disturbance suppression and (b) x-axis angular motion and x-axis deflection disturbance suppression.
In the simulation environment, verify the preset trajectory output performance of the magnetic levitation planar motor system. The float motion trajectory in the three-dimensional space is shown in Figure 10. The preset trajectory in (a) is circular. It can be seen from (a) that ACB control has an excellent trajectory output effect on circular trajectory. The preset trajectory in (b) is a regular hexagon. It can be seen from (b) that the ACB control effect is still good.

(a) Three-dimensional trajectory of circular motion and (b) three-dimensional trajectory of hexagon motion.
As shown in Figure 11, a high-precision MEMS sensor is installed on the float to measure its actual motion trajectory. In the experimental platform, MPU9250, 16-bit data precision is used to collect the acceleration data of the x-axis and y-axis in real-time. Then the data is filtered and converted into displacement and fed back to the oscilloscope.

MLPM coil group and experimental platform.
Magnetic levitation planar motor moves according to the circular trajectory, as shown in Figure 12(a), where Sx and Sy represent the displacement of the x-axis and y-axis. Each grid of abscissa and ordinate represents the displacement of 0.3 m. In (b), the trajectory is decomposed into the x-axis and y-axis. Each grid of abscissa represents 1 s, and each grid of ordinate represents the displacement of 0.625 m.
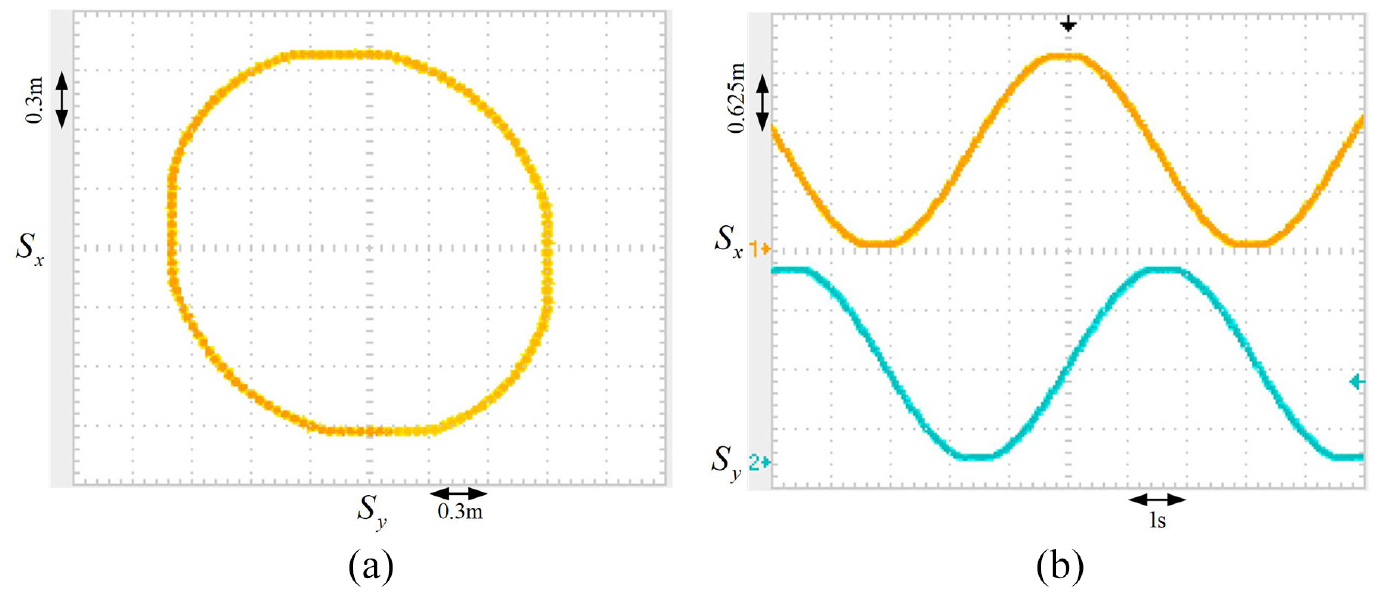
(a) Circular motion trajectory of magnetic levitation planar motor and (b) decomposition of circular motion trajectory.
To test the turning performance of the float of magnetic levitation planar motor. The float moves according to the hexagon track as shown in Figure 13, decomposes its motion trajectory to the x-axis and y-axis. The parameters of horizontal and vertical coordinates are the same as those in Figure 12.

(a) Hexagon motion trajectory of magnetic levitation planar motor and (b) decomposition of hexagon motion trajectory.
The experimental results show that the float can complete a circular motion with a circumference of 6.283 m in about 6 s. From the decomposition output of the motion trajectory of the x-axis and y-axis, the distance of 2 m float movement needs 3 s, the speed is about 0.6 m/s, and the dynamic response-ability is superior. The ability to output the preset trajectory is good. In the experiment of angle turning, the float completes a hexagon trajectory movement in about 6 s, and its turning process is fast, stable, and not overshoot. Finally, the float control experiment of the maglev planar motor proves that the device has ideal response speed, strong robustness, and good dynamic tracking performance. It is applied in the logistics transmission system described in this article and has a good effect.
Summary and prospect
In this article, the magnetic levitation planar motor is applied to the field of logistics transmission. Taking the model of the magnetic levitation planar motor as the object. Some research on its modeling and controller are made.
Taking the magnetic levitation planar motor model as the object, the mathematical model of thrust and torque of MLPM is analyzed. The current distribution strategy of the coil group and the force/current model is obtained.
According to the characteristics of the linear system, the adaptive controller is designed based on contraction theory. The error between the actual value and the estimated value of the uncertain parameter is limited in the region that meets the contraction characteristic.
Compared with the traditional PID control, the incremental stability analysis based on contraction theory makes the control system get rid of the dependence on the balance point. At the same time, it proves its robustness in the case of uncertain model parameters, which provides a new idea for the further application of magnetic levitation planar motor in logistics.
Footnotes
Acknowledgements
The authors are grateful to the participants of the project for their cooperation.
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by National Natural Science Foundation of China (51809128) and National Defense Basic Pre-research Program (jcky2017414c002).