
Abstract
In this paper, a high accuracy attitude tracking control is presented for a quadrotor unmanned aerial vehicle (UAV) under the model uncertainties and external unpredictable disturbances by using a robust feedback control method. First, the cascade attitude dynamics of a quadrotor UAV is derived with the lumped disturbances. Then, a backstepping adaptive modified robust integral of the sign of the error (RISE) control is designed to improve the robustness of the control system against the disturbances. For arriving high accuracy tracking under the disturbances, a prescribed performance control algorithm is employed in combination to hold the transient state performance where the convergence rate is faster than the prescribed value, and the maximum overshoot is less than the prescribed value. The stability analysis is carried out to prove that the presented controller could guarantee that the closed-loop system is asymptotically stable, and the tracking feedback errors can converge to an arbitrarily small value near zero. The superior performance of the proposed control method is illustrated in simulations against the nonlinear lumped disturbances, and the benefits of the proposed robust controller is corroborated by comparing with the existed controller.
Keywords
Introduction
The quadrotor UAVs can achieve autonomous flight, hovering, and backward flying. The quadrotor UAVs have been used in wide applications of civil and military fields due to the excellent flight performances. With these performances, the quadrotor UAVs could be qualified to different sorts of missions such as reconnaissance, rescue, delivery, and so on.1,2 Hence, several groups of researchers have developed a variety of linear and nonlinear control laws to hold the flight performance of the quadrotor UAV in application of different fields.3–5 In Zheng et al., 6 a second order sliding mode controller was suggested for a quadrotor UAV to perform asymptotic tracking control. In Sarabakha et al., 7 a fuzzy state-feedback controller based on the Takagi-Sugeno fuzzy model was designed to guarantee the stability of a quadrotor UAV. In Shirzadeh et al., 8 based on the visual servoing system, a vision-based control scheme was investigated for a quadrotor to achieve high moving target tracking performance. In Huo et al., 9 an attitude stabilization controller was designed for a quadrotor by using backstepping control law. In Torres et al., 10 a fuzzy state feedback controller based on Takagi-Sugeno technique was presented to stablilize a quadrotor. As is knows to all, each control algorithm has its advantages and shortcomings. For instance, the backstepping control approach easily deals with the cascade control model of the quadrotor UAV by recursive technique, but the backstepping control approach is lack to cope with perturbations to hold the robustness. The advantage of the sliding mode control strategy is of rejecting the uncertainties of control system, and has well robustness under disturbance, but the weakness is that the chattering phenomenon could not be eliminated by using the switching function. Hence, varieties of composite control schemes were suggested to obtain high control performance for complex control systems.11–15 The flight control system of the quadrotor UAV also is a complex control system which is nonlinearity, coupling, and particularly under-actuated.16–18 Hence, the compositions of various control strategies are presented for the quadrotor UAV. A backstepping sliding mode controller was carried out to making well trajectory tracking and ensure the stability for a quadrotor in Kacimi et al. 19 A fuzzy sliding mode controller was employed to guarantee attitude stabilization of a quadrotor, and a fuzzy approach was use to eliminate chattering in Corchado et al. 20 A second-order sliding mode control law combined with PID was design to improve attitude tracking performance and convergence rate for a quadrotor in Lee et al. 21 All of the aforesaid references focus on the control performance of the quadrotor by depending on the dynamic of the control system or ignoring the disturbances.
On the other hand, on account of the widespread disturbances including internal disturbances of control system and external random disturbances exist in the control system, the problem of robust disturbance rejection control has always been a research focus in the theory of control.22–25 The control system of quadrotor UAV is more susceptible to disturbances due to under-actuated and special structure. For stability performance of a quadrotor UAV under different types of the disturbances, a backstepping controller based on high-order extend state observer was designed in Shi et al. 26 In Castillo et al., 27 an attitude controller based on disturbance observer was presented for a quadrotor that guarantees tracking performance under aggressive attitude maneuvers and external disturbances. In Huang et al., 28 a vessel landing controller based on adaptive sliding mode control law was investigated for a quadrotor with parametric uncertainties. In Eliker and Zhang, 29 an adaptive backstepping fast terminal sliding mode controller was employed for a quadrotor UAV that is suffering from uncertain parameters and external disturbances. With the anti-disturbance control law, the control schemes of the aforesaid references have guaranteed the stability of control system. However, the transient performances of the quadrotor UAV have received few effort.
For improving the transient performances of control system, several schemes were carried in the theory and applied in a number of applications.30–32 In Nguyen and Chen, 33 a sliding mode controller combined with prescribed performance control law was designed for a positioning system to achieve high precision in the tracking. In Mobayen and Ma, 34 a finite-time composite nonlinear feedback controller was designed for a chaotic systems with external disturbances and parametric uncertainties which guarantees high performance synchronization. In Zerari and Chemachema, 35 an adaptive neural network controller combined with the prescribed performance technology was designed to overcome the unknown effects for continuously stirred tank reactor systems. Motivated by the aforesaid research results, an adaptive robust attitude controller integrated with the prescribed performance technology is presented to achieve high accuracy attitude tracking and improve the transient performance for a quadrotor UAV under the disturbances in this paper. Compared with the aforesaid literatures on quadrotor UAV, the principal theory contribution of this paper are summarized as follows:
Compared with the previous works, this paper aims to the point on the problem of the high accuracy robust tracking and the transient performance improvement for the quadrotor UAV with the unmodeled dynamics and external disturbances. For dealing with the mentioned question, an adaptive backstepping modified robust integral of the sign of the error control with the prescribed performance is proposed for improving attitude tracking performance of the quadrotor UAV.
The attitude stability of the quadrotor UAVs in previous works has been researched, but the transient performances of the quadrotor control systems are often neglected. In this paper, a prescribed performance function is employed for restrain the transient performances. Under the action of the prescribed performance technology, the control system can quickly recover from transient state to stable state during suffering from disturbances, and the control system of the quadrotor UAV also has faster convergence rate and smaller overshoot.
Considering the backstepping arithmetic is lack to cope with perturbations, the modified robust integral of the sign of the error control technique are combined for rejecting the disturbances to hold the better robustness in this paper. Compared with the previous RISE law, the modified adaptive RISE is better at reduce the chattering phenomenon duo to a hyperbolic function is employed to replace with the switching term, and an adaptive gain is proposed to compensate the internal and external disturbances by dynamic parameter adjustment.
The paper is organized as follows. The attitude dynamical model of quadrotor system is introduced in Section 2. The robust controller with the prescribed performance and the stability analysis of the proposed controller are given in Section 3. In Section 4, the numerical simulation results are given. Finally, a conclusion is drawn in Section 5.
Mathematical model of quadrotor attitude dynamics
The main characteristics of quadrotor UAV are the vertical takeoff, hovering and super maneuvering flight. The control system of the quadrotor UAV is susceptible to the uncertain disturbances during flight. Hence, during the quadrotor dynamics model established, the disturbances cannot be ignored. Many previous works have introduced the quadrotor modeling clearly. The attitude and fixed coordinate frames in Figure 1 are established to show quadrotor UAV attitude motion.

where
where

The inertial frame and body frame of quadrotor UAV.
Design of the attitude controller
To achieve a high accuracy attitude tracking, a robust attitude control design with prescribed performance is derived for quadrotor UAV under the disturbances. To elucidate the main idea of the controller design, the specific structure of adopted control scheme strategy is depicted in Figure 2.

Quadrotor UAV attitude control system structure.
Prescribed performance function
Define the tracking errors of the attitude Euler angles,

where
The quadrotor UAV tends to deviate from the reference command, while it is subject to the uncertain disturbances. The control system is changed from steady state to transient state, and the control performance declines rapidly. Hence, when the control system is suffering from the disturbances, the control scheme must have ability to guarantee that the transient state of the control system must be restrained for returning to the steady state quickly. For ensuring prescribed transient state and restraining bounded tracking error, the prescribed performance control scheme is employed as 36 :

where,
For unifying the control objectives, the output error transformation function is defined, which is able to equivalently transformed the constrained tracking error into the unconstrained error.

where

With the properties of the function

The time derivative of (6) is calculated as follows:

The formula (7) can be rewritten as follows:

where
Tracking control design
For arriving the control objective, the attitude tracking controller is presented for a quadrotor with disturbances, which parallels the backstepping control scheme.
Step1: Define the dynamic tracking output error as:

where
Based on (1), (8), (9), and taking the time derivative of (3), the formula (8) is rewritten as:

Based on (10),

where
Step 2: Derivating with respect to (9),

Substituting the second equation of (1) into (12), the formula (13) can be obtained as:

Defining the auxiliary tracking error

where
Substituting (13) into (14),

Based on (15), the proposed attitude tracking controller can be designed as follows:

For rejecting the lumped disturbance
where
For compensating the external disturbances, and reducing the constraint of the controller design where the uppers of disturbance and its derivatives are beforehand determinated, an adaptive law is employed for the modified RISE robust term

where
Substituting the controller (16) into (15),

Based on (14) and (17), derivative with respect to (19),

Stability analysis

Defined

Integral equation (22)

Based on (23), the following inequality can be obtained as follows:

Delay on the above set condition
Based on (21) and (25), it is obtained that the auxiliary function
Based on the Lyapunov stability theory, the following Lyapunov function is designed

where
The time derivative of (26) is given as

With the squares of the components of

Based on the assumed gains, the (28) can be rewritten as

where
Based on the (27) and (29), the
Thus, Theorem 1 is proven.
Simulation and analysis
Aiming at the system of the quadrotor UAV (1) and the controller (16), the proposed control scheme is demonstrated. The value of inertial matrix is
In order to validate the designed control scheme, the desired trajectory is selected as

The main gains of the proposed control are selected as:
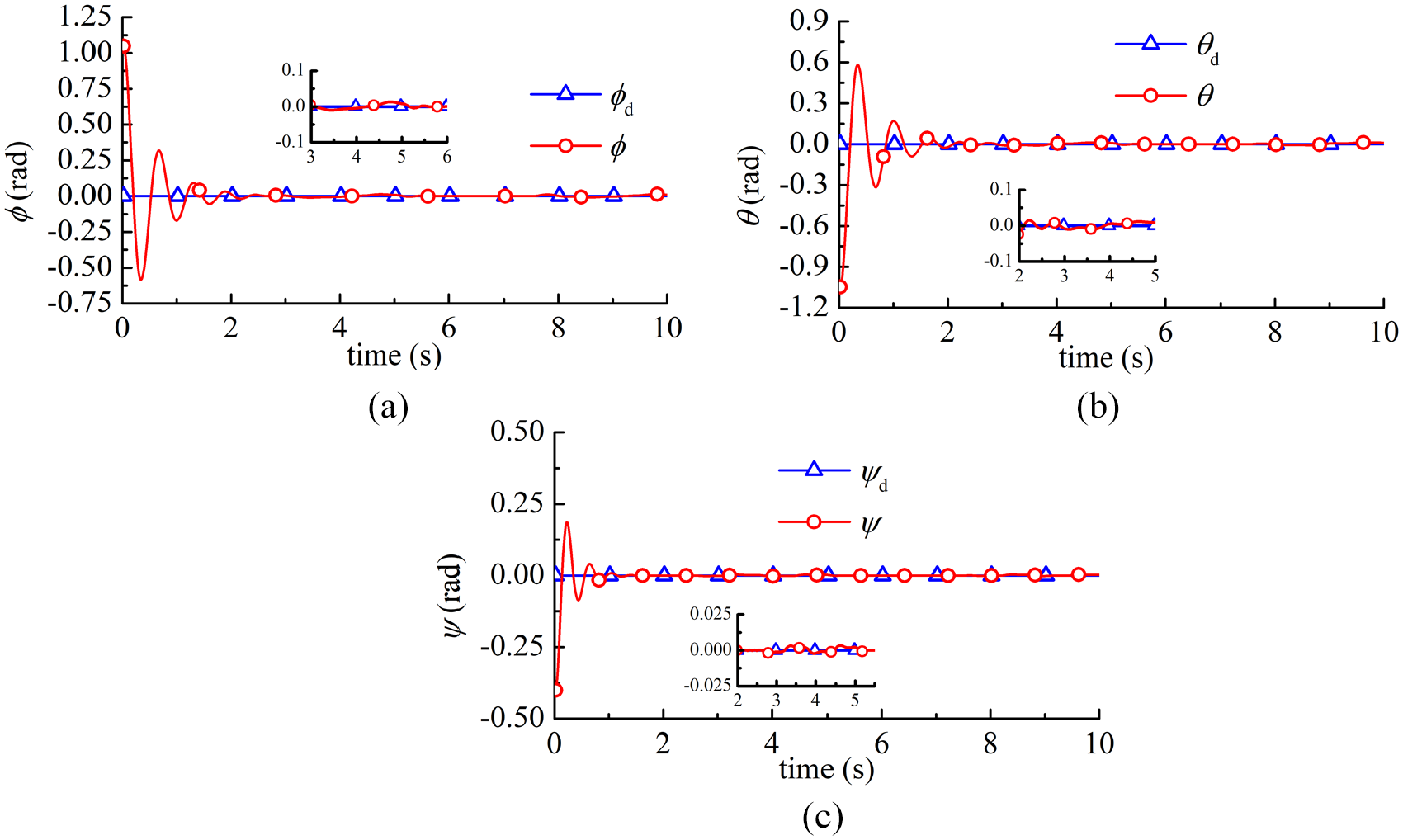
In Figures 3 to 6, the simulation results are shown by using the proposed control scheme. In Figure 3, the attitude angles tracking results are presented with the proposed controller. With the effect of the proposed controller, the three attitude angle values all can arrive the desired trajectory within around 1.6 s, and the overshoots are taken to zero nearly. Thus, the setting of the control objective can be achieved. In Figure 4, the attitude angular velocities of the quadrotor UAV are shown. The attitude angular velocities values are held around the zero after 1.6s, it is mean that the control systems reach the stable state under the action of the controller. The attitude tracking errors of the quadrotor UAV are shown in Figure 5. As the show, the three attitude angles tracking errors

Attitude angle tracking results of the quadrotor UAV with the proposed control scheme: (a) Euler angle
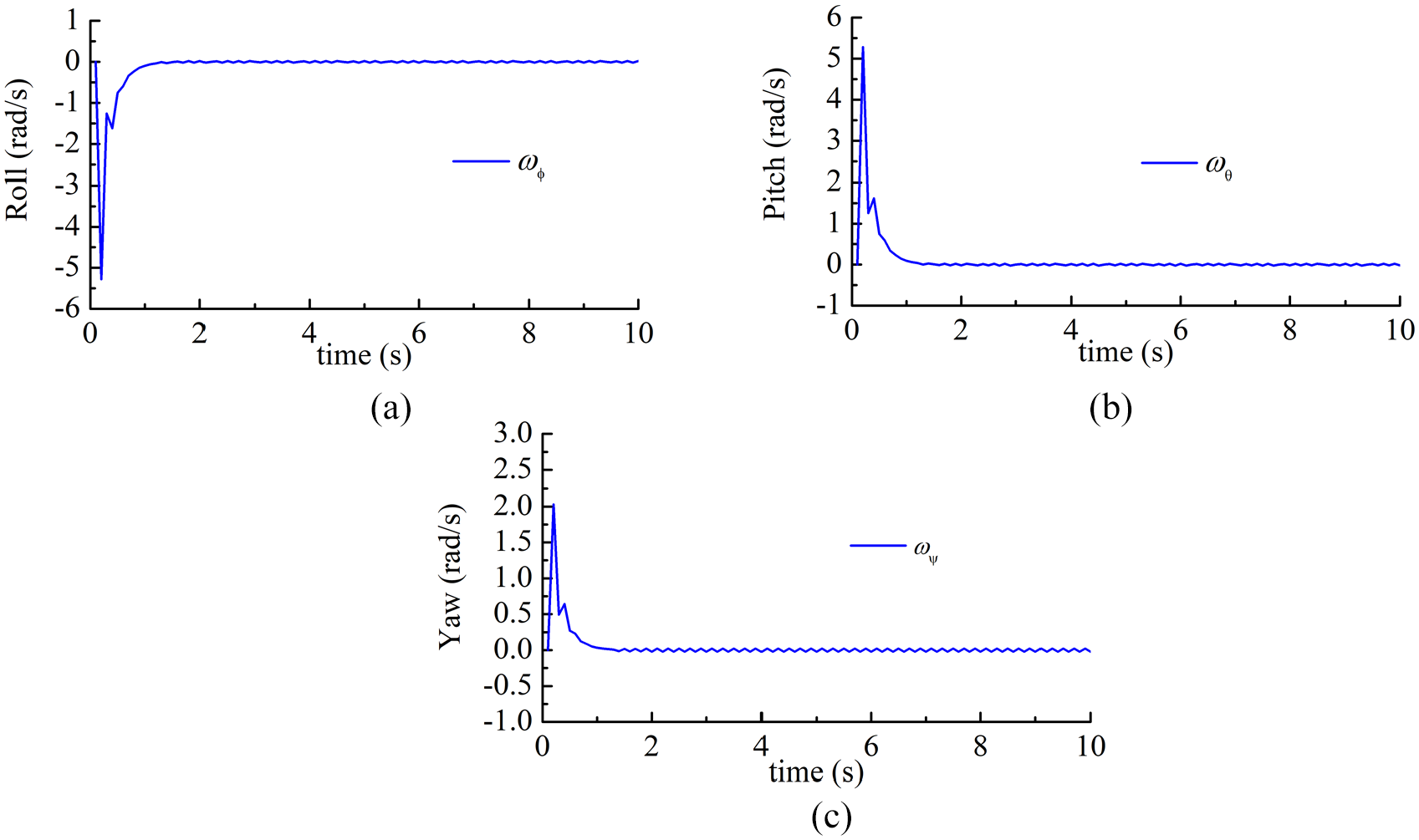
Attitude angular velocity of the quadrotor: (a) angular velocity

Attitude angle tracking errors of the quadrotor UAV bounded by performance function: (a) tracking error

The control inputs of the quadrotor UAV: (a)
In addition, for validating the robustness and advancement of the proposed control scheme, a backstepping sliding mode controller in Almakhles
37
and a traditional RISE-PID controller are carried out respectively for comparison. The quadrotor UAV with the traditional RISE-PID controller or the backstepping sliding mode controller suffering from the aforementioned same disturbances
Attitude angle tracking results of the quadrotor UAV with the RISE-PID control scheme: (a) Euler angle

Attitude angle tracking results of the quadrotor UAV with the backstepping-SMC control scheme: (a) Euler angle
Conclusion
In this study, a backstepping adaptive modified RISE feedback controller with the prescribed performance is proposed for high precise attitude tracking of a quadrotor UAV under the model uncertainties and external disturbances. For guaranteeing the transient performance of the control system under the disturbances, a prescribed performance function is employed for imposing the constraints on the attitude Euler angle tracking errors. Under the influence of the prescribed performance functions, the tracking errors can obtain the better transient properties with quicker convergence rate and minimum overshoot, and transient performances is evidently improved to against the disturbances. For improving the robustness, the backstepping control law combined with adaptive modified RISE are presented for attitude tracking. The stability analysis and the numerical simulation results have verified to the effectiveness of the proposed control strategy. It reveals that the proposed controller has better tracking performance than traditional RISE-PID controller or backstepping sliding mode controller. The primary of the future improve work is to devise adaptive finite-time robust tracking controller to guarantee the transient performance for a quadrotor UAV subject to parameter perturbation, time-delay and full states saturation.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported in part by the National Natural Science Foundation of China (grant number 51875093), and in part by Fujian Province Education Department Project (grant number JAT190565), and in part by Putian Science and Technology Project (grant number 2020G005), and in part by Putian University Project (grant number 2019011).