
Abstract
In this paper, a novel adaptive attitude tracking control method is investigated to enhance tracking performance and robustness for a quadrotor unmanned aerial vehicle (UAV) against the modeling uncertainties and external disturbances. First, the attitude dynamics of a quadrotor UAV based on the modified Rodrigues parameter (MRP) is derived. Then, an adaptive dynamic surface technique with robust integral of the sign of the error (RISE) control approach are designed to improve the tracking performance and robustness of the quadrotor attitude control system suffering from the uncertainties and disturbances. A prescribed performance function is employed to improve the tracking performance of the quadrotor UAV by restraining the tracking errors range. The stability analysis proves the presented control scheme can guarantee all the close-loop control system signals are bounded and control system is uniformly ultimately bounded. Simulation results are carried out to demonstrate the superior and effective performance of the presented control method.
Keywords
Introduction
Quadrotor UAV has four rotors with symmetrical distribution and simple mechanical structure. Quadrotor UAV has the characteristics of vertical take-off and landing, fixed hover and super maneuvering flight, and it has been applied in various fields of military and civilian. However, the quadrotor UAV is a typical underactuated system, and it is susceptible to disturbances in flight.1,2 For high flight performance, a variety of control schemes have been designed and developed for the quadrotor UAV.3–5
The tracking problems of quadrotor UAV were widely drawn attention from lots of researchers by designing various control schemes including proportional-integral-derivative (PID),6,7 liner quadratic regulator, 8 feedback linearization, 9 and so on.10–12 The control performances of linear controller is poor when the quadrotor UAV is suffering from aggressive maneuvers operation or unknown disturbances.13,14 Sliding mode control, which is able to reject and eliminate the disturbances, was developed for quadrotor UAV.15,16 In Zheng et al., 17 a second order sliding mode controller was designed to track the position and attitude of a quadrotor. 17 In Reinoso et al., 18 a sliding mode control was employed to hold maintaining stability of a quadrotor under different operating scenarios. 18 In Wang and Wan, 19 a sliding mode attitude controller based on proportional integral observer was designed for a quadrotor UAV to improve the robustness. 19 In Xuan-Mung and Hong, 20 a robust backstepping saturated controller based on an extended state observer was carried out for a quadrotor UAV to solving the trajectory tracking problem. 20
For the robustness of the control system subjecting to modeling uncertainties and external disturbances, some adaptive control schemes have been attracted a great interests of researchers to deal with modeling uncertainties and external disturbances for the quadrotor UAV.21–23 In Moussa and Mohamed, 24 an adaptive nonsingular fast terminal sliding mode tracking controller was designed for a quadrotor UAV. 24 In Barghandan et al., 25 an adaptive fuzzy sliding mode controller was carried out for attitude stabilization of the quadrotor UAV. 25 In fact, the problems of the nonparametric and parametric uncertainties need to be taken into account simultaneously in the trajectory tracking of the quadrotor UAV.26,27 For this purpose, An adaptive global fuzzy sliding mode controller was developed for a quadrotor UAV. 28 In Wang et al., 29 an adaptive robust backstepping controller and a global sliding mode controller was developed respectively for attitude stabilization and position tracking of the quadrotor UAV. 29 An adaptive backstepping horizontal controller was designed to solve trajectory tracking problem for a quadrotor UAV under uncertain parameters. 30
Based on the above literatures and existed researches, the backstepping control and sliding mode control are the popular and common control arithmetic for quadrotor UAV.31,32 The backstepping control is highly effective to deal with the cascaded structure of the quadrotor UAV, and the sliding mode control is adept at rejecting the disturbances.33–35 To take advantage of their strengths, lots pf researchs were carried out by combining backstepping control with sliding mode control, and the robustness of the proposed control approaches was obvious improved.36–38 In Moussa and Mohamed, 39 an adaptive backstepping fast terminal sliding mode controller was developed for a quadrotor UAV under the parametric uncertainties and external disturbances. 39 In Basri, 40 an adaptive backstepping sliding mode controller was designed for stabilizing and tracking of quadrotor UAV. 40
According to the above literatures, it is obtained that the tracking problems of the quadrotor UAV under the disturbances were improved. Nevertheless, the backstepping control and sliding mode control have obvious disadvantages. The backstepping control has the problem of item number expansion during the derivation of the virtual controller, and the sliding mode control has chattering phenomenon with switching function. The dynamic surface control can avoid the number expansion problem of the backstepping control by using first-order filter which calculates the virtual controller. The continuous robust integral of the sign of the error control approach can remarkably accommodate for smooth disturbances and realize asymptotic stability.
Motivated by the above discussions, the dynamic surface control (DSC) approach combine with the robust integral of the sign of the error (RISE) are designed for a quadrotor UAV attitude control system under the disturbances to improve the tracking performance in this paper. Compared with the aforementioned works, the principal theory contributions of this paper are summarized as follows:
Compared to pre-existing works, the purpose of this paper aims to improve the problem of the robust tracking performance for a quadrotor UAV attitude control system under modeling uncertainties and external disturbances. To deal with the problem, an adaptive dynamic surface robust integral of the sign of the error controller with the prescribed performance is designed to achieve high attitude tracking performance for the quadrotor UAV.
For reaching the high tracking performance of the quadrotor attitude control system, the transient performances are significance for holding the stabilization. A prescribed performance function is designed to hold the transient performance of control system in this paper. With the prescribed performance, the control system can quickly return from the transient state to the stable state, and the track errors can be limited in the predetermined ranges, and the precision of tracking performance can be hold.
For highly effective to deal with the cascaded structure of the quadrotor UAV, the dynamic surface control approach is used to avoid the problem of the expansion of the differential terms of the backstepping control. For rejecting the uncertainties and external disturbances and avoiding the chattering phenomenon, the robust integral of the sign of the error control scheme is combined to achieve high tracking performance, which can outstandingly reject the smooth disturbances and achieve asymptotic stability. An adaptive function is carried out to compensate the errors between the RISE term and the disturbances, which can reduce the efforts of the feedback gains of the RISE.
The paper is organized as follows. The quadrotor attitude dynamic based on the MRP is presented in Section 2. In the Section 3, the designed procedure and the stability analyze of the present controller are presented. The numerical simulation results are carried out in the Section 4. Finally, a conclusion is drawn in the Section 5.
The attitude dynamics of the quadrotor UAV based on the MRP
The quaternion often is used to describe the attitude dynamics of the aircraft, and it has applied to the practical projects. The quaternion has much advantages such as high computing precision, overcoming the singularity in the calculation and so on. The quaternion can be described as follows:

where
The lacks of the quaternion which is used to describe attitude dynamics are that the four elements of the quaternion have constraints, and the elements are not independent of each other. Only three independent Euler angles are needed to determine the position of the three-dimensional space, hence, there is redundancy in attitude calculate by using the quaternion. For achieving three independent parameters to describe the attitude, the modified Rodrigues parameter is presented and defined as follows:

where
The attitude dynamics of the quadrotor UAV based on the modified Rodrigues parameter is presented as follows:

where
Define the auxiliary function

The time derivative of (5) is given as follows:

Multiply both sides of the second equation of (3) by

Based on (5) and (6), the (7) can be rewritten as follows:

where
Defining
where
Control design
Prescribed Performance transformation
Defining the tracking reference value

For ensuring that the tracking error

where
There is constraint on the prescribed performance condition (11) that make the calculation complicated. To avoid the problem, the attitude tracking error of the quadrotor can be designed by using an equivalent unconstrained prescribed performance condition as follows:

where

The properties of the function

Based on (12) and (13), then transformed error

The time derivative of (14) can be calculated as follows:
The attitude control system (9) can be rewritten by replacing the first equation of (9) with corresponding equation (15) as follows:
Tracking control design based on the RISE-DSC
In this section, an adaptive robust attitude tracking control approach based on RISE-DSC is proposed. The detail design processes are presented as follows:

Differentiating
Defining the Lyapunov function

The time derivative of (19) can be calculated as follows:
For guaranteeing the Lyapunov function

where
The dynamic equation of the low pass first-order filter with the output

where
The filter error can be obtained as follows:

Differentiating (23), the equation can be obtained as follows:
Designing the auxiliary function as follows:
where
Based on the (25), the equation (24) can be rewritten as follows:


Differentiating (27)
where

where
Defining the Lyapunov function

Differentiating (30)

For guaranteeing the Lyapunov function

where

For showing the design process clearly, the structure chart of the presented control approach strategy is depicted in Figure 1.
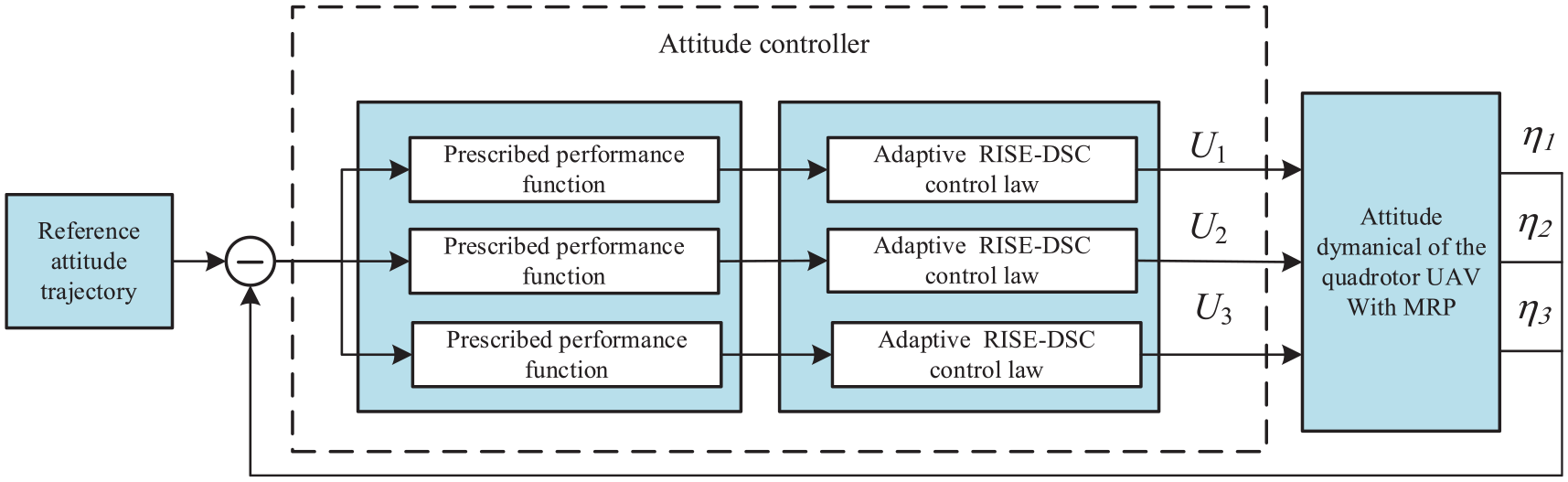
The structure graph of the quadrotor UAV attitude control system.
Stability analysis
Defining the bound closed sets as follows:
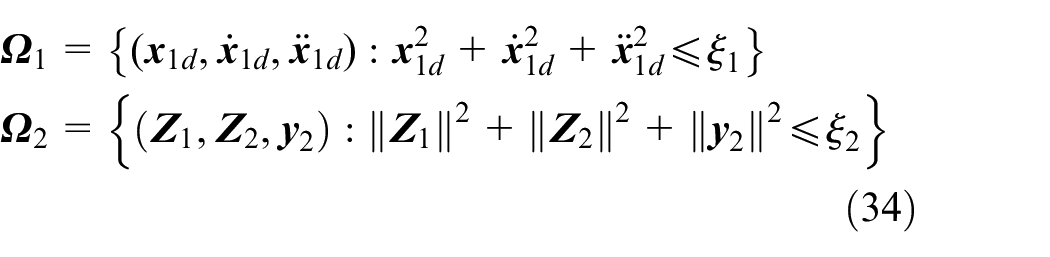
where

where

where
When
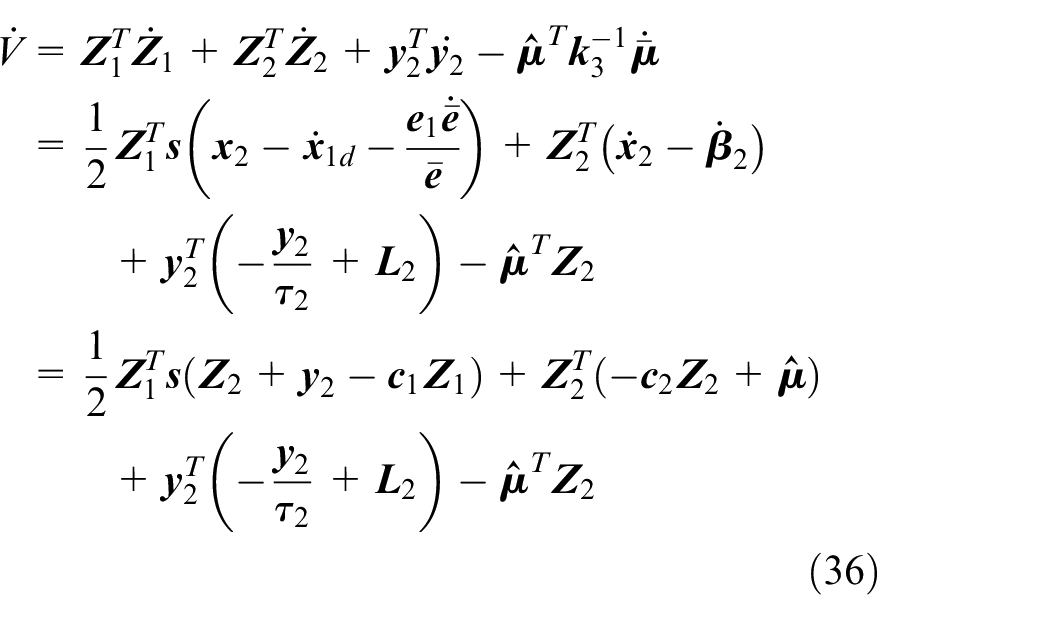
For clarity and simplify. Differentiating (28), the following equation can be obtained as follows:
The follow inequation can be obtained by Young’s inequality
Let

Substituting (37) into (36), the follow inequation can be obtained:
where
When
Thus, all close-loop system signals are bounded, and tracking error
This proof is completed.
Simulation and analysis
For verifying the effectiveness and superiority and the proposed control scheme, some number simulation results are carried out. The desired trajectory of the modified Rodrigues parameters of the quadrotor UAV attitude is chosen as:
The performance functions are designed respectively as
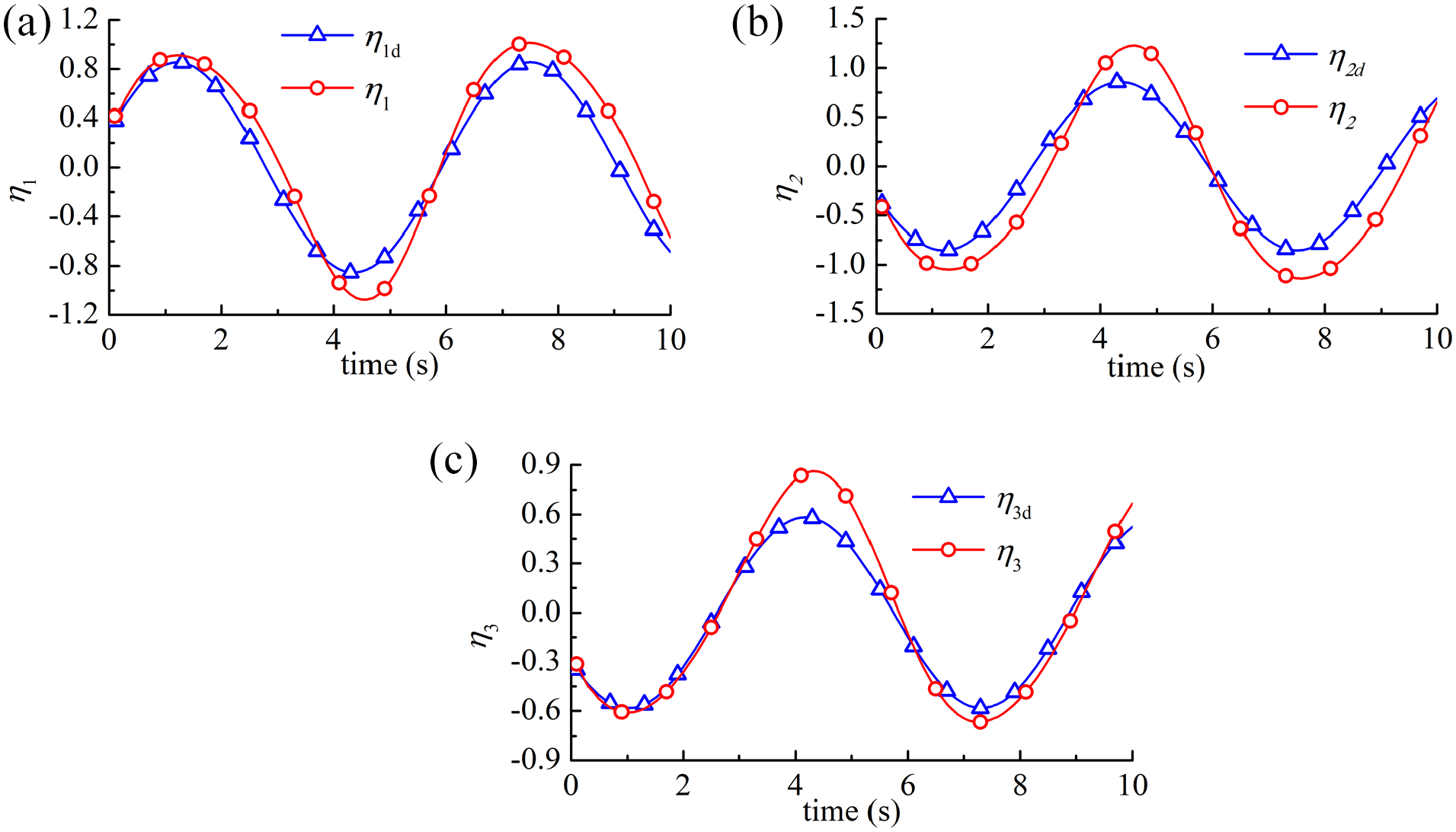
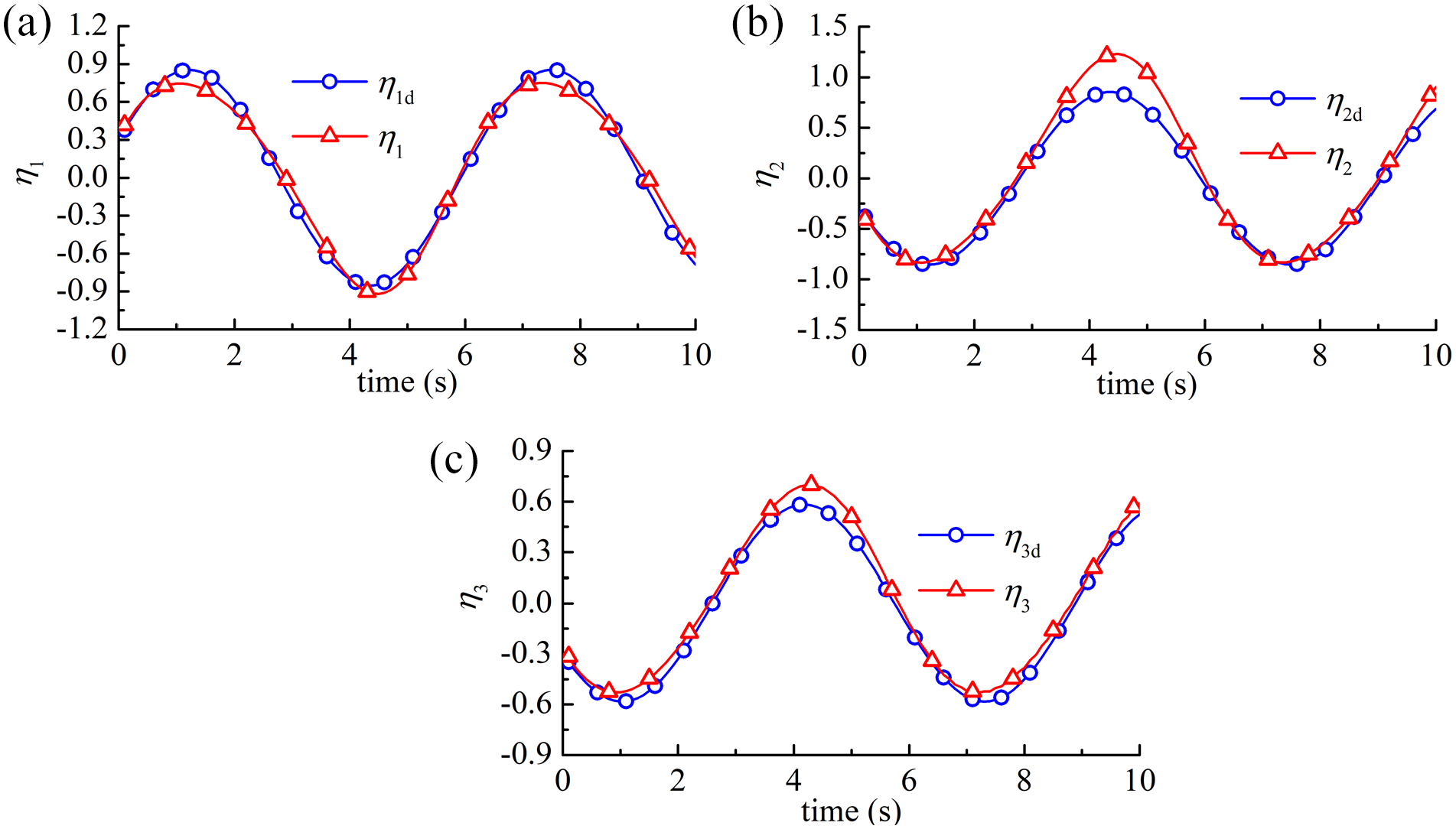
In Figures 2 to 5, the simulation results are carried out by using the proposed controller. In Figure 1, the tracking results of the modified Rodrigues parameters of the quadrotor attitude are presented by using the proposed controller. As shown from the figures, the three output values of the quadrotor attitude control system can quickly track the desired trajectory. In Figure 3, the tracking errors of the modified Rodrigues parameters are presented. With the presented controller, the tracking errors can be limited between the performance function
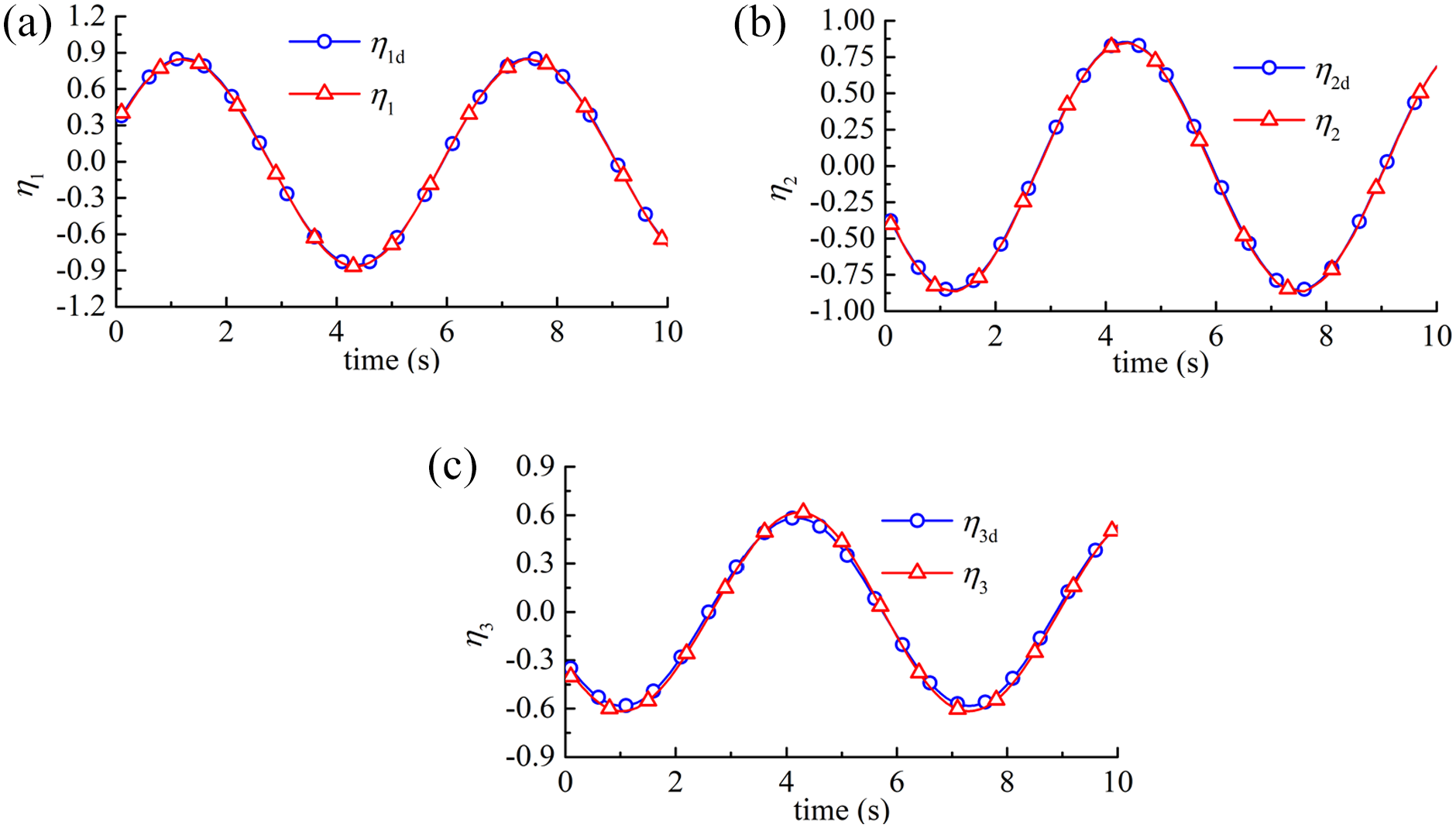
The tracking results of the modified Rodrigues parameters of the quadrotor attitude: (a) the tracking result of
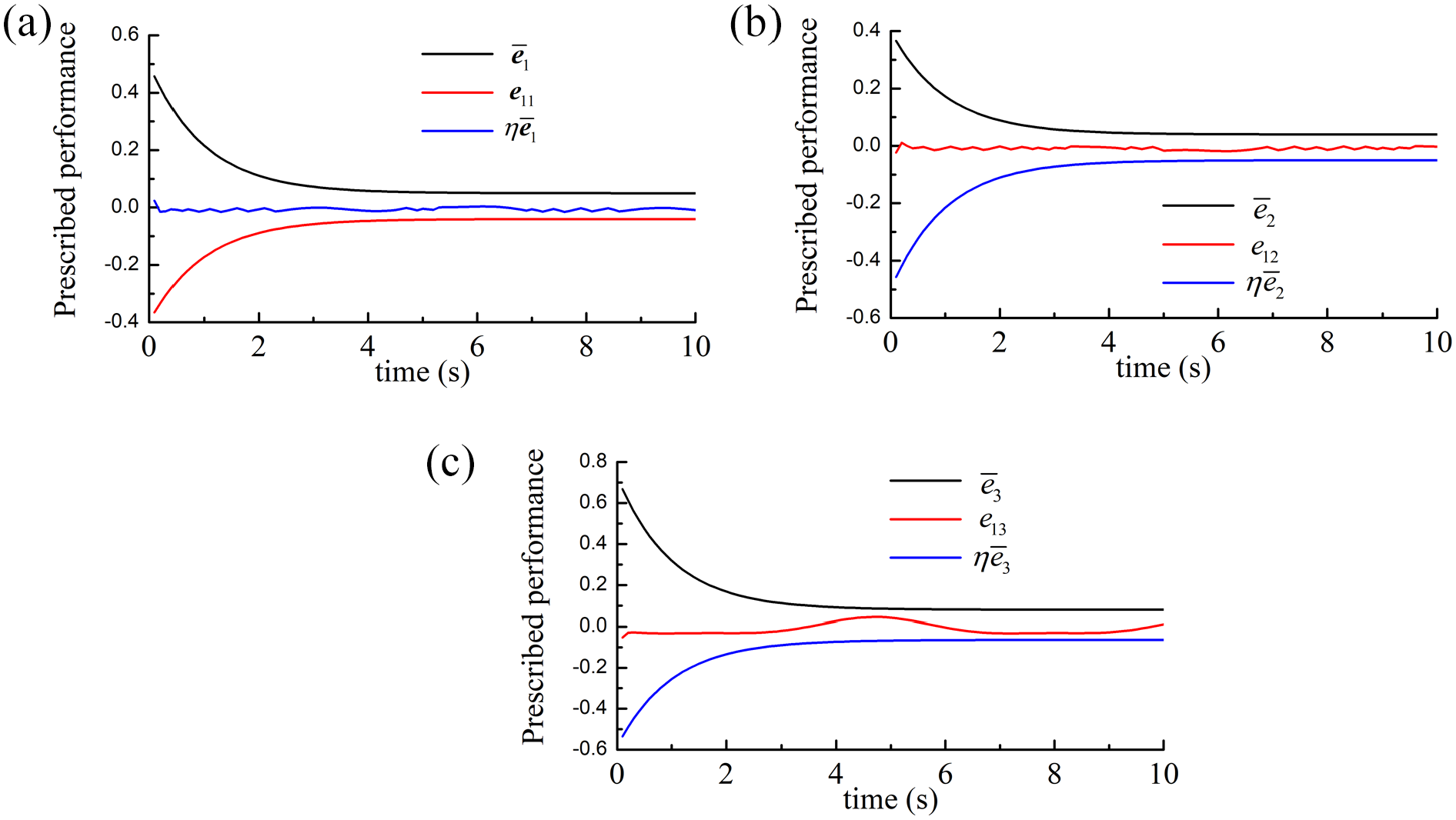
The tracking errors of modified Rodrigues parameters bounded by performance function: (a) tracking error
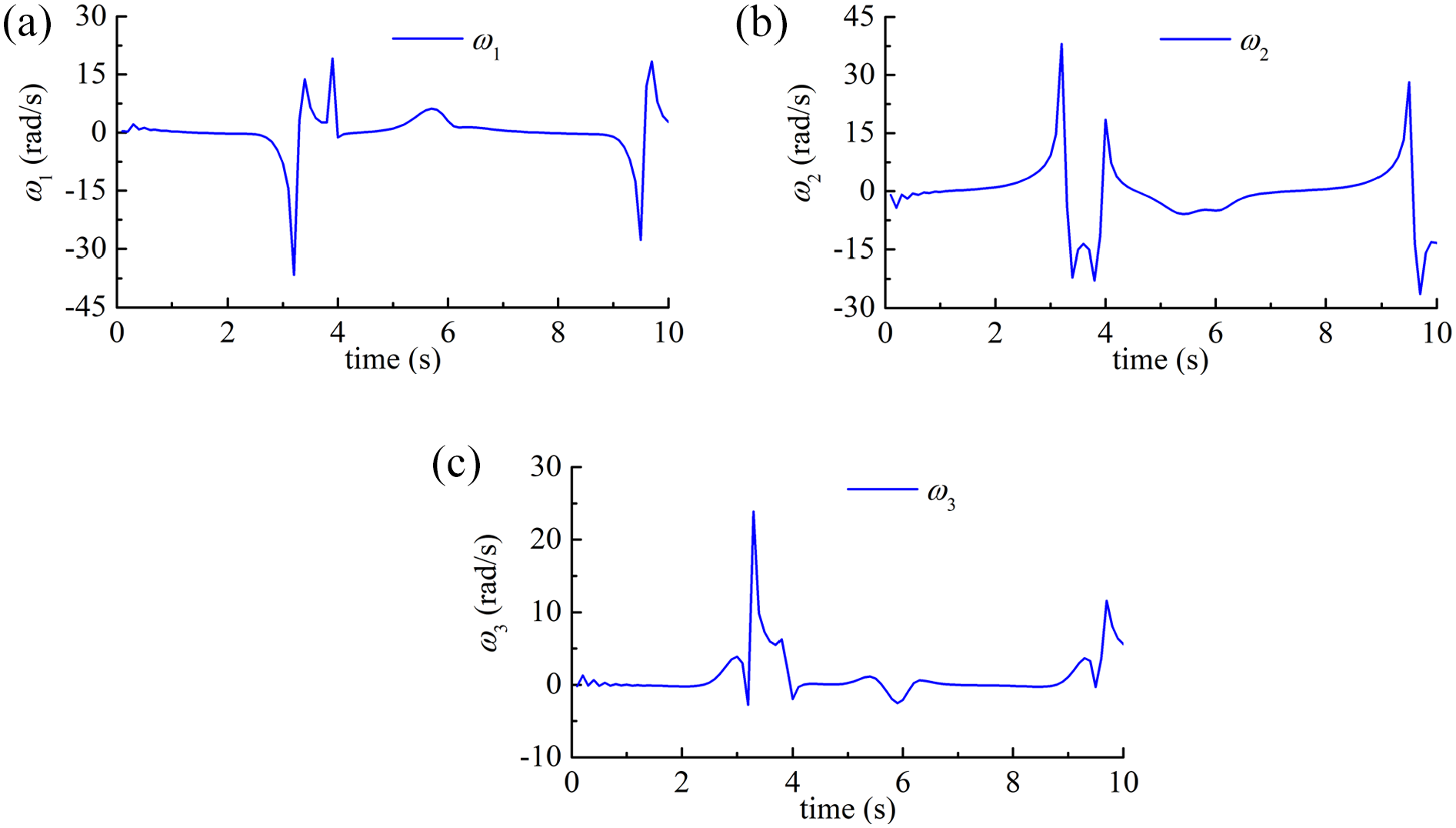
The angular velocity of quadrotor attitude: (a) angular velocity
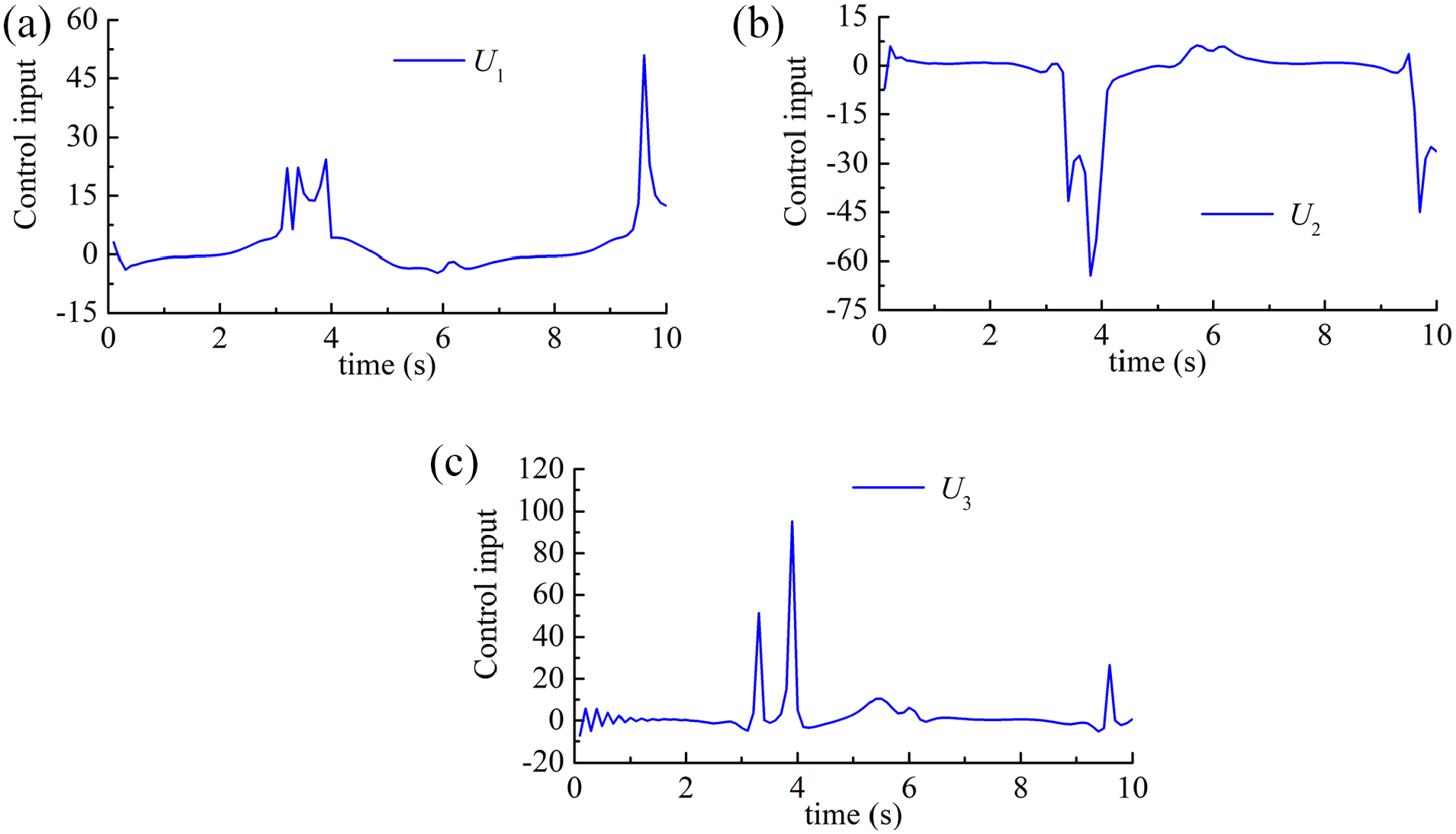
The control input of the quadrotor attitude: (a)
In addition, for showing the superiority of the tracking and robustness performances of the proposed control scheme, comparisons with a traditional dynamic surface controller (DSC), a traditional sliding mode controller (SMC) and a DSC combining with SMC for the quadrotor attitude control system are carried out. The same disturbances
The tracking results of the modified Rodrigues parameters with traditional DSC: (a) the tracking result of
The tracking results of the modified Rodrigues parameters with traditional SMC: (a) the tracking result of
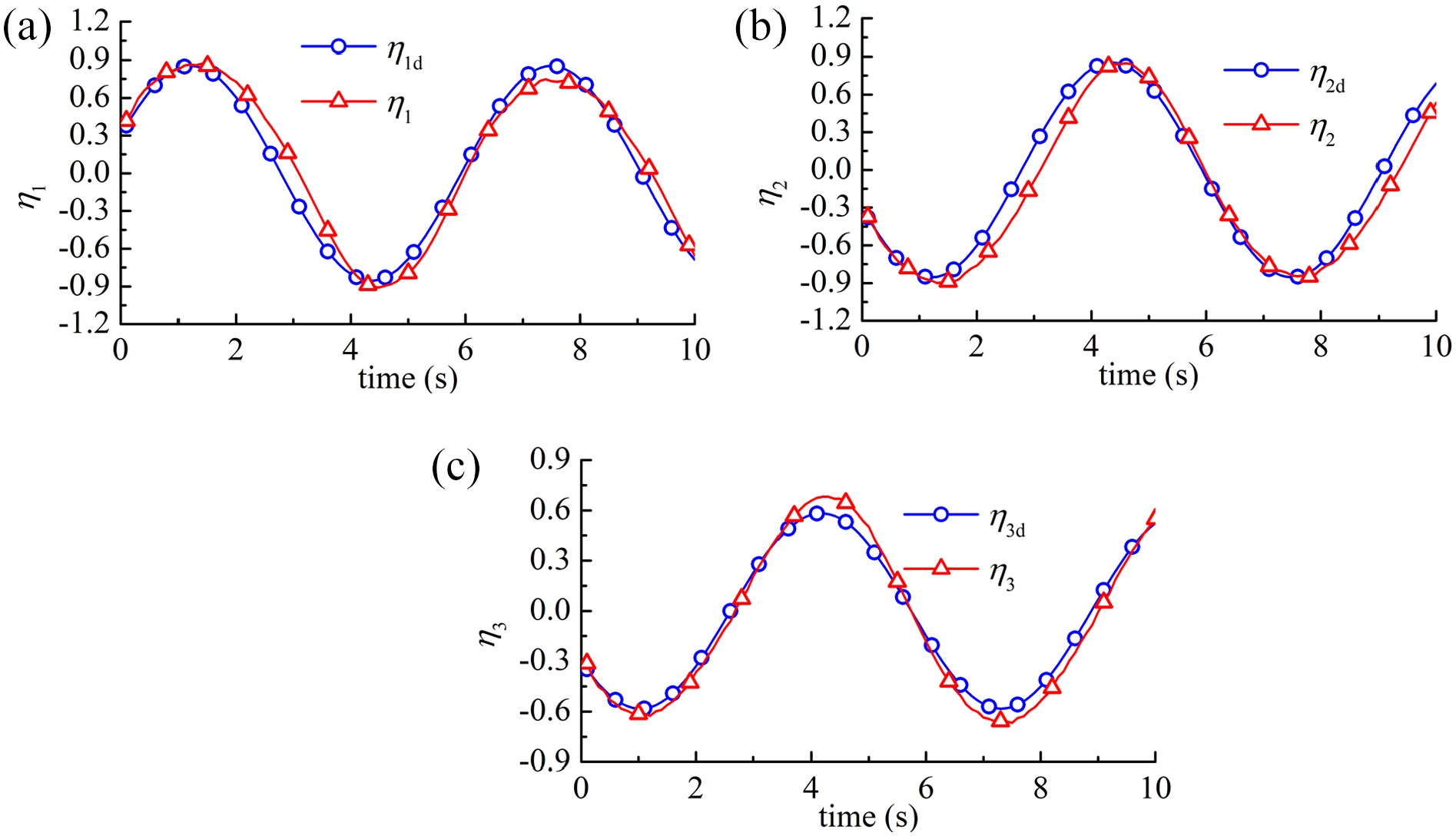
The tracking results of the modified Rodrigues parameters with SMC-DSC: (a) the tracking result of
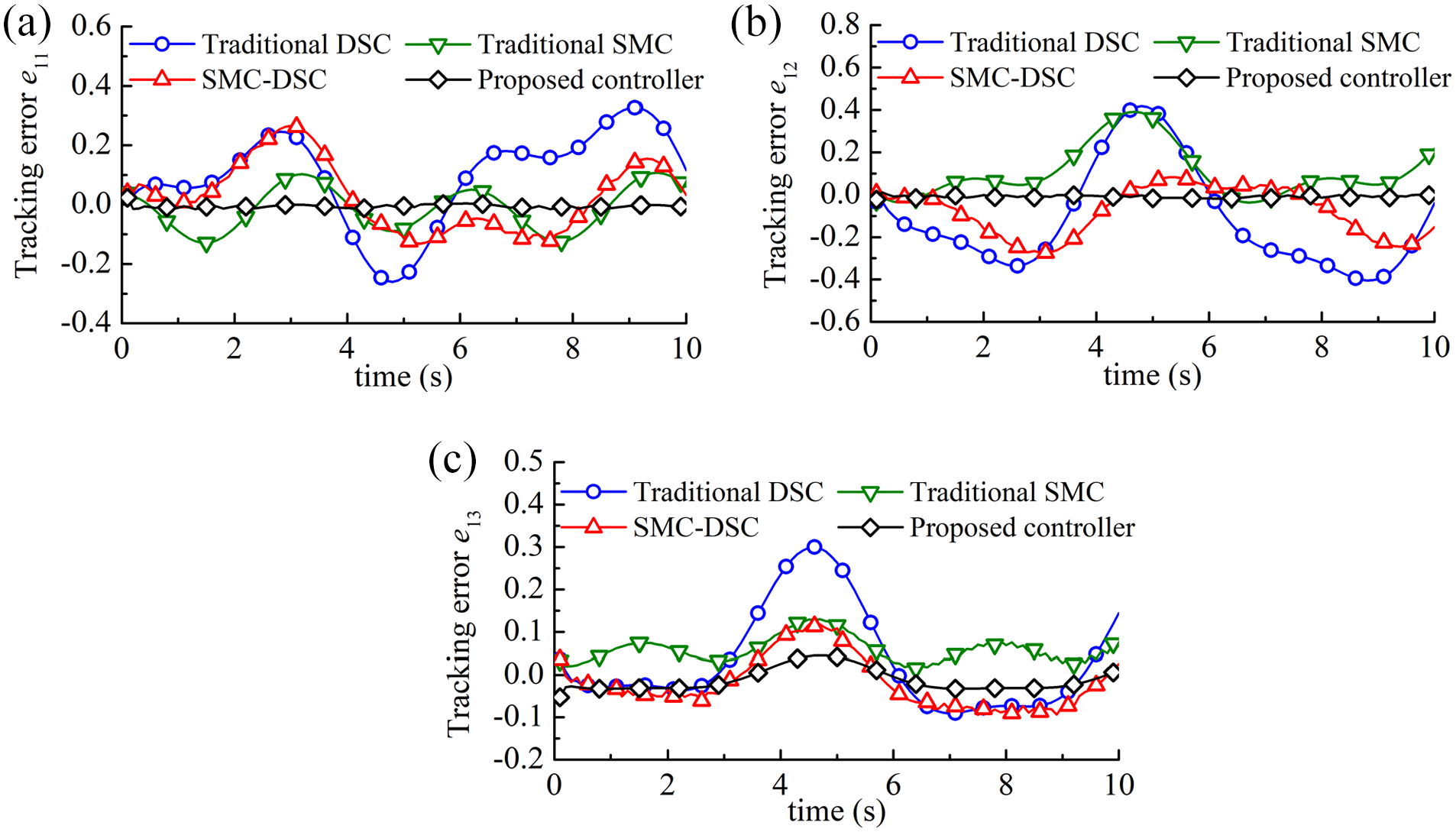
The comparison of tracking error with different control schemes: (a) comparison of tracking error
Conclusion
In this paper, an adaptive dynamic surface robust integral of the sign of the error control approach with the prescribed performance function is presented to improve the tracking performance of a quadrotor attitude control system surfing from the modeling uncertainties and external disturbances. The dynamic surface control law combined with the RISE are designed to improve the tracking performance and robustness for attitude control system of quadrotor UAV, and an adaptive function are designed to eliminate the errors between the RISE term and the disturbances, and a prescribed performance function are employed to improve the tracking performance of the control system by constraining the attitude tracking errors. The stability analysis and the simulation results have verified to the surprise and effective performance of the presented control strategy.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported in part by the National Natural Science Foundation of China (grant number 51875093), and in part by National Natural Science Foundation of Fujian Province, China (grant number 2021J011109), and in part by Fujian Province Education Department Project (grant number JAT190565), and in part by Putian Science and Technology Project (grant number 2020GP005), and in part by Putian University Project(grant number 2019011).