
Abstract
In previous works, the perceived safety and comfort are currently not the principal objectives of all industries, especially robotics system. It might lead not to take psychological safety into consideration of adjusting robot behavior, hence, the human-robot interaction lacks of ease and naturalness. In this paper, a novel framework of human’s zones to ensure safety for social interactions in human-machine system is proposed. In the context of service robot in hospital, machine should not produce any actions that may induce worry, surprise or bother. To maintain the comfortable interaction, an algorithm to update human’s state into personal space is developed. Then, a motion model of robot is demonstrated with assumption of the reference path under segmentation. Dynamic Window Approach is employed for motion planning while Optimize Cost function searches the shortest path in a graph. To validate our approach, three test cases (without human-aware framework, with basic model of human’s zone and with extended personal space) are carried out in the same context. Moreover, three interactive indicators, for instance collision index (CI), interaction index (CII) and relative velocity of robot (Vr), are analyzed in different situations. Lack of human-aware framework, robot might break all thresholds and meet the potential collisions. While robot with basic model of human’s zone in its perception maintains the physically safe thresholds but not socially, it respects whole criterions in both physical constraints and social relations. As a result, our findings are useful for robot’s navigation in presence of human while the socially comfortable interaction is guaranteed.
Keywords
Introduction
In our era, the appearance of robots is presented in every aspects of human’s life. There are numerous applications using autonomous robot for instance engineering education, 1 food service robot, 2 delivery robot, 3 patrol robot, 4 assistive robot, 5 or entertain robot. 6 Most of these working environments are crowded and complex area which is difficult for the autonomous system. Once, a mistake in controlling, programming or operating occurs, the extreme casualty would effect on human. In this situation, human safety related to robot navigation could be divided into two sub-systems: (1) physical safety ang psychological safety. Obviously, the content of the first category is to sustain a safely closed distance to target for physical contact. The minimum space ought to be respected to avoid injuries. In the cyber meaning, psychological safety implies that the autonomous vehicle should not cause worry and unsafe feeling to human during its navigation and interaction.
Conventionally, in the aspect of physical contact, the robot navigation system considers a person as regular obstacle, and employ the techniques of collision avoidance. Several researches such cognitive mapper and planner, 7 vector field histogram, 8 dynamic window approach, 9 optimal velocity obstacles, 10 randomized kinodynamic planning, 11 collision state 12 have been completed in recent years. Though these works have been estimated that robot is able to generate its trajectories to prevent the physically undesired contact with human, none of them get in touch with psychological status of human and beyond the normally interaction. As a result, robot does not concern about human’s characters and social constraints.
To overcome the drawbacks of conventional navigation system in autonomous robot and improve its behavior in social interaction, it is necessary to define a framework for comfortable human safety which ensures not only physical but also psychological contact in sharing workplaces. The idea is formerly based on traditional navigation system, 13 and recent studies extended the impact of human’s character into the dynamic social zone. In Truong and Ngo, 14 the information from human or group of humans in several circumstances have been taken into account to enhance the zone spaces. Then the data of human-related zone is incorporated into motion planner to navigate from both static and dynamic obstacles. In the same issue, Chen et al. 15 suggested an efficient framework integrating task constraints and social conventions for path planning. The two-dimensional asymmetric Gaussian function is used to calculate the cost of points in social interaction space. Based on A-star algorithm, mobile robot passes human in a manner that makes safe feeling and relax mind. Through a series of these researches, the new trend to embed the navigation system with awareness-related-human becomes a hot topic in next years.
The reminder of this paper is constructed as follows. Section 2 carry out a brief view of previous works in the same domain. The problem statement is demonstrated in Section 3 to address the applicable situation, the main troubles and the scope of research. Section 4 proposed the modified model of safely and well-being human-interrelated framework. For a social context in hospital or healthcare service, the validation in simulation is denoted in Section 5. Some conclusions are expressed in Section 6 to discuss in future.
Related works
Generally speaking, the up-to-date human-aware navigation techniques could be arranged into two sub-classes such that navigation based on single human-state and group of human-state. The data from human-state or group of human-state is plentiful and diverse, for instance human position, orientation, type of motion and field of view. In initial stage, this information was utilized to develop a motion planning system. Later, it is incorporated into motion planner. The existing limitations still have an unexpected effect on mobile robot navigation system. In Zhong et al., 16 a model of the cooperative navigation between discrete decisions to navigate and behavior of human has been formed. Using Hamiltonian Markov chain Monte Carlo sampling to obtain the feature extractions and Voronoi graph to explore the space of robot’s trajectories, this method imitates the behavior of pedestrians or the natural variance of human’s movement. To extend this work with two additional blocks, such perspective placement and a trajectory planner, researchers 17 used human position, field of view and posture as input of motion generator. However, it lacks of human motion and data of human group in order to make a decision in navigation system. The autonomous robot, however, only could detect a solitary person circumstance and perceive the surrounding scene as 2D image. Nishitani et al. 18 recommended a sensitively human-centered navigation framework including human position and motion states. This research suggested six harmonious instructions in order to guide the mobile robot to guarantee a physically safety and socially interaction. Although they tried to perform the framework combining with human position and motion, there is no information for a group of persons.
In several years ago, only a few navigation systems for mobile robot have been studied by incorporating states of human or group of humans, yet almost researches are still in the early period of development. Shiomi et al. 19 mentioned an alerting algorithm for robot’s navigation in dynamic populated environments. Even though they tried to consider the concepts of personal space and the O-space, their limitation is to focus only a group of two persons. With their model, it is difficult to extend more than two humans in further study. More recently, developers 20 discussed about various sub-problems of socially path planning and applied two Gaussian functions to mix if group of humans is defined. To obtain a proper path rapidly, a matching square method is investigated in a personal space model for individual humans. However, this study only concerns on a standing human.
Problem statement
Traditionally, robot is permitted to navigate safely in real-world application if they deal with typical blocks encompassing perception, localization, motion planner and control.
21
Nevertheless, the mobile robot treats human as regular obstacle since it did not collect the human information and social constraints into navigation system. As a reason of that autonomous robot cannot certify the comfort and safe drive in presence of human. To augment the machining intelligence, robot must be capable to distinguish a person from other obstacles. recognize the featured characters of human from socio-spatio-temporal context. In Truong and Ngo,
22
for every detected passenger, the personal space as Figure 1 is represented as below Gaussian function. The
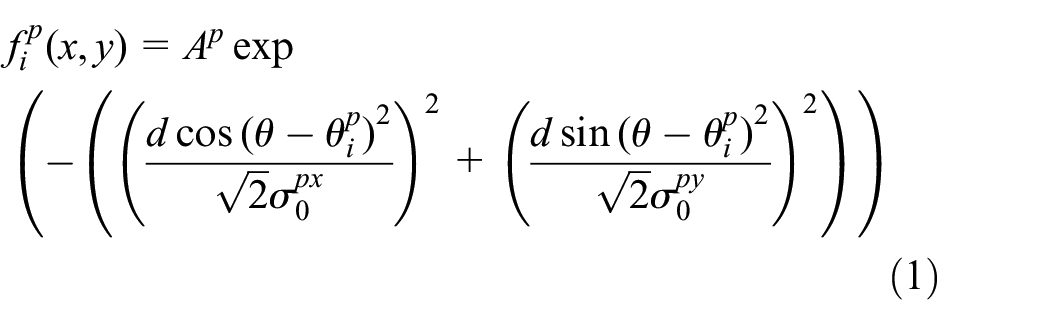



where

Socially and comfortably personal model in 2D (a) and 3D (b).
In the above equations, a personal comfort zone has been denoted in order to prohibit the robot from crossing the space and satisfies the requirement of relax feeling. Relative information of autonomous robot in respect to human’s pose is illustrated as Figure 2. In reality, robot not only navigates in front of a person, but also interacts with a group of humans. Based on the motion feature of coherent indicator, a socially practical scenario is presented as Figure 3. In clinical treatment, the overload of healthcare service is inevitable to suffer large number of patients. Especially, in the season of infectious disease, there are a lot of outpatients embracing elder persons or children. They often line up and wait for a long time in the corridor. 23 If this situation occurs in the developing country, it is more critical for doctors and nurses to check the public health. Reducing the waiting time of patients and idle time of doctors is considered as the crucial issue to improve the hospital management. In our era, smart hospital is a specialized term to indicate the applications of appropriate advanced technologies in clinical service. 24 Robust approach to recognize and support their patients become one of criteria to rate the quality service. In the effort to develop an approach for automatically serving the activities in hospital, assistive robot is one of highly autonomous solution for this context. This robot must work along the corridor of hospital, interact with citizens and carry out an advice to them. Since the interactive targets are elder people, children or teenager, the sick persons always reveal their worries, stresses or discomfort feeling when they react to autonomous machine. Even though robot appears with friendly and smiling interface, patients are still scared when mobile robot travel across them. Two aspects of robot behavior are (i) the expected action and (ii) determine the expected action by considering the spatial relationship. 25 The overall navigation strategy was driving straight toward the goal and either stop when the person and robot came close or drive on toward the goal and pass the path of person.
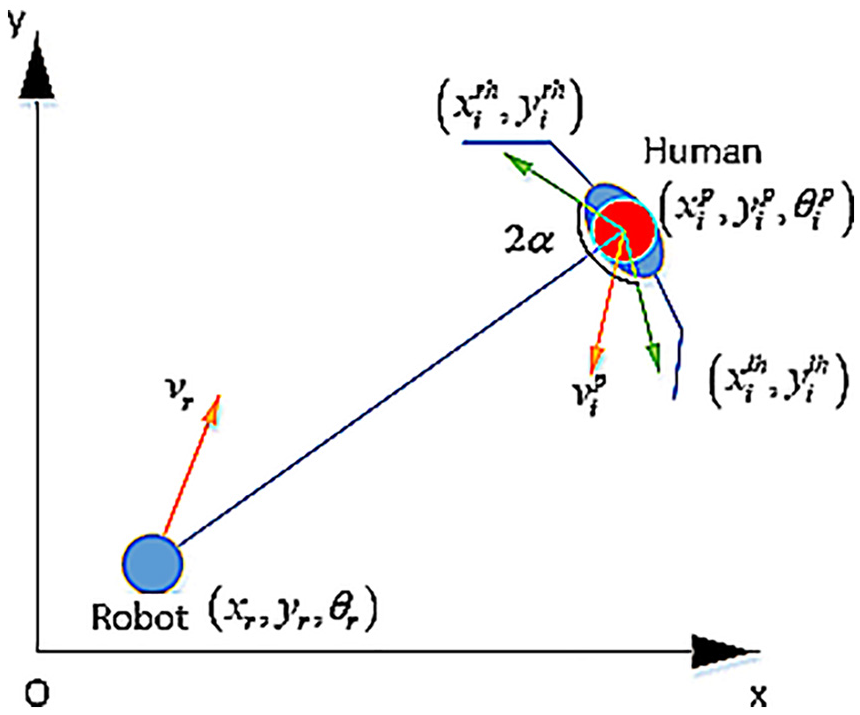
Relative relationship between human and robot.

The context of medical treatment in front of clinical service room: (a) one line up and (b) two line up.
However, this considerable case is very sensitive for the reason that ill-persons are easily vulnerable and have various diseases. Mobile robot could not pass the passages as normal format motion. It also must take human information (position, pose, modes of movement) and human states to decide the navigation action. Besides, the environment of hospital is rather different since it might contain a variety of viruses from defections’ patients. Maybe, robot becomes an intermediate object to transfer bacteria around the medical area and spread out them. 25 In the situation of Covid epidemic, social interaction is restricted and limited since viruses could exist on surface in several days. As a result, minimum distance between autonomous machine and human should be respected. Previous developments in social and comfort personal space reveal some limitations, for example it did not remark to health’s status in order to avoid the closing contact. In Bai et al. 26 and Cascella et al., 27 the report has announced that the distance to infectious patients should be two meters minimum. Because bacteria can go together with droplets if sick person cough out. There is a need to establish the social constraints in respect to infectious diseases for service robots in the field of healthcare.
Proposed approach
Generally, a new system structure of proposed approach in human-aware navigation for mobile robot is demonstrated as Figure 4. In detail, cyber world and physical world are separated into two blocks. In cyber framework, model of human’s zones, localization and motion planner are embedded to augment the cognitive machine. Owing to this part, autonomous robot is aimed at distinguishing humans from regular obstacles by extracting the socio-spatio-temporal characteristics. The improved personal space deriving from extended personal space and basic one plays a role as intelligent navigation. For motion planner, Dynamic Window Approach technique is requested to engage the smoother trajectory generator and collision avoidance. Above and beyond, the prediction of robot’s movement is mentioned into navigation framework.

The proposed structure of human-aware navigation framework and real-world environment.
In physical block, the real contact between robot and humans or object is specified. It contains various functional blocks such human detection including single person or group of humans, vibration-less motion control with asymmetric S-curve profile or robot’s actuator. In this paper, we concentrate on cyber framework to expand the socially and comfortably human-machine interaction.
Improved personal space
The notion of personal space was firstly introduced by Edward T. Hall
28
who depicted the subjective dimensions that surround each person and the physical distances they try to keep from other people, according to subtle cultural rules. In Truong and Ngo
14
studied the extended personal space which dimension and shape of surrounding environment for a human were represented by triplet
An algorithm of extended personal space.
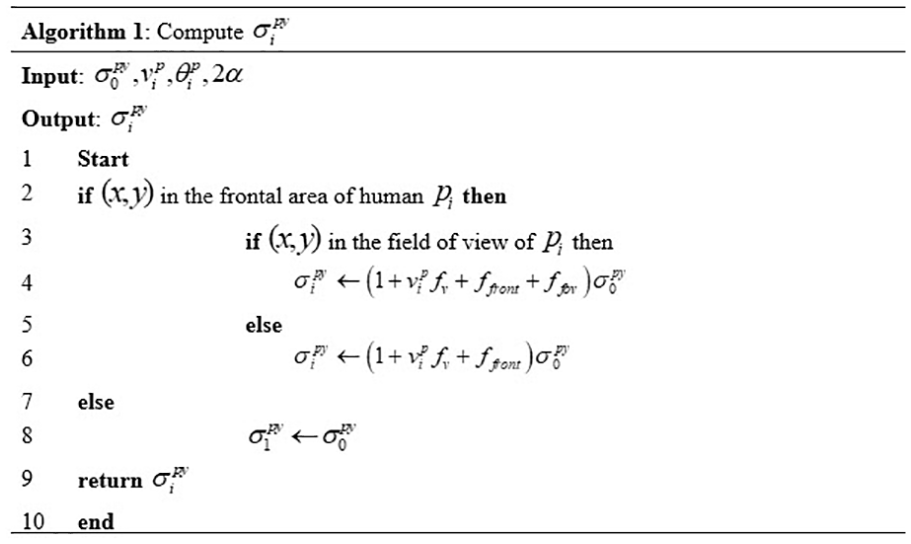
The overall structure of proposed personal space is featured as Figure 6. It is considered that human
Description of improved personal space algorithm.

Social and comfort personal space in the 2D contour projected cost map grid (left) and 3D (right): (a) non-model, (b)
Human interaction detection
In Hall,
28
there are seventy percent of citizens joining into social interaction group. As a result, it is necessary to detect human and group of humans in order to launch the rules of behaviors. In recent years, some strategies were advised to surpass these problems.29,30 In this work, graph-cut of F-formation (GOFF) is chosen to employ.
31
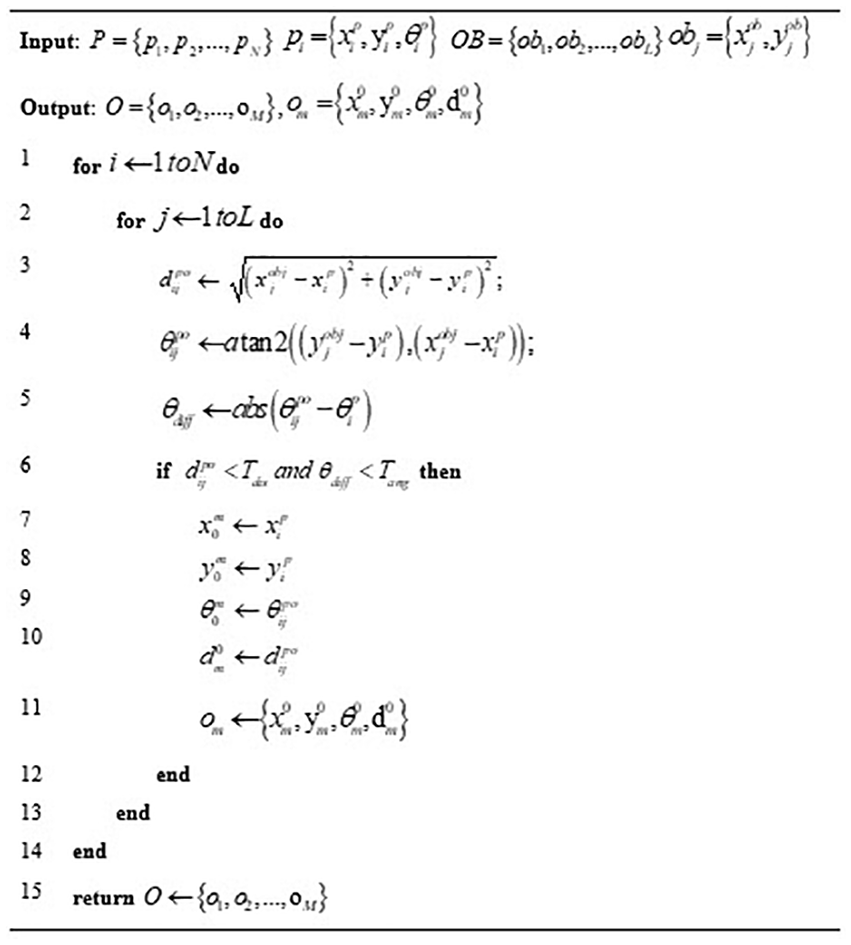
In the vicinity of robot, a set of humans
In addition, the combination with information of moving state helps to discover more suitable model in continuously dynamic environment except for pose and position of static standing person. Four main parameters related to characteristics of human
For modeling the interactive space, a method to find the central point and radius of interactive group. It is assumed that a set of group detection
Motion model of mobile platform
In this part, a motion model of robot is described with assumption of independent control of linear velocity and angular velocity. We consider that the trajectories of robot consist of series of segmented circle. It is convenient to notify the potential collision between obstacles and circular trajectory. Additionally, the reference path under segmentation supports Dynamic Window Approach in motion planning of robot. The kinematic configuration of mobile platform contains

with


In the case that


Thus, a relation of above parameters is written as

Implementation of dynamic window approach algorithm
Search space
To determine the velocity space, several rules are respected to efficiently implement.
32
In the Dynamic Window Approach scheme, only circular trajectory is available by a set of coefficients

2-D velocity space.
Also, the velocity constraint needs to be fluctuated in allowable range so that the physically safety in its hardware and generation of new path planning are warranted. The set of parameters

where
In Figure 9, the dynamic window technique limits the reasonable velocities to desired values in short time and ensures its movement with restricted acceleration. All curvatures outside of dynamic window space

With above given restrictions, the output result of searching space is

where

Dynamic window technique.
Optimize cost function
Typically, most of previous researches for the motion planning problem are applied A-star or Dijkstra in finding the shortest route between nodes in a graph. It picks the unvisited vertex with the lowest distance, then computes the distance through it to each unvisited neighbor and updates the neighbor’s distance if smaller.
33
The existing troubles which comprise non optimal result of heuristic function and require large memory, become a barrier to appear in widespread applications. In our paper, an optimize cost function

where
Initially, target heading

Description of optimize function.
Consequently, clearance function
Results of study
To verify the effectiveness of proposed approach, a test setting is built with model of mobile robot in healthcare service environment as Figure 11. The simulation scenario uses the motion planner in this research combining with human-aware navigation system. In the context of hospital, medical center or nursing home, there are huge moving persons including patients, relatives, elders or healthcare staffs. Generally, it is necessary to create a physical barrier in navigation for autonomous robot to avoid real-world collision. Moreover, most of them are sensitive and often appear in front of robot. Not only prevent the serious casualty but also warrant the comfort and relax interaction need to be considered since the sick person is easily stressed and the reaction of elders is too slow to keep away from crash. In detail, the indoor environment is a 2-D sharing space dividing into two areas:

Test scenario including human, obstacle, wall and group of humans.


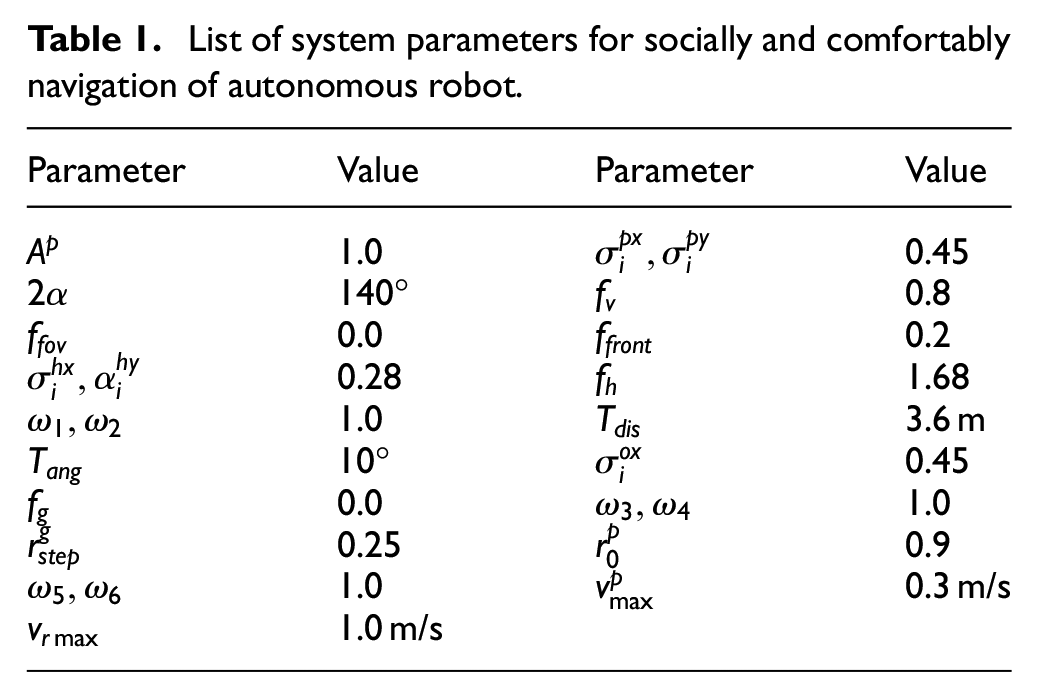
To navigate successfully, the gmapping Simultaneous Localization and Mapping (SLAM) method to construct the environmental grid map. Later, the localizing process is completed by Adaptive Monte Carlo Localization (AMCL) package. In this scene, traveler detection and tracking human work with laser scanner while digital camera on-site. Initially, the system parameters are set-up as Table 1 to satisfy not only the practical circumstance but also the model of socially and comfortably navigation. During the whole test, three principle parameters are monitored to determine the interaction status. CI returns the physical safety of human. For instance, if CI is less than 0.1 then the safe distance between robot and human is larger than 0.6 meters. Reversely, CI equals to 0.54 when robot enters the personal space and require 0.5 meters distance. CII measures the social interaction between human and interesting objects or human groups. In the case of multi-human, the central point is regarded as intersection zone and CII would reduce when autonomous vehicle moves far from it. The threshold of CII is approximately less than 0.15. Furthermore, the velocity (Vr) of mobile robot should be investigated when it navigates because the output performance of proposed approach depends on pose, position and vibration in further. These main parameters will be analyzed to carry out several indications, support the motion planner in generating the traveling trajectories.
List of system parameters for socially and comfortably navigation of autonomous robot.
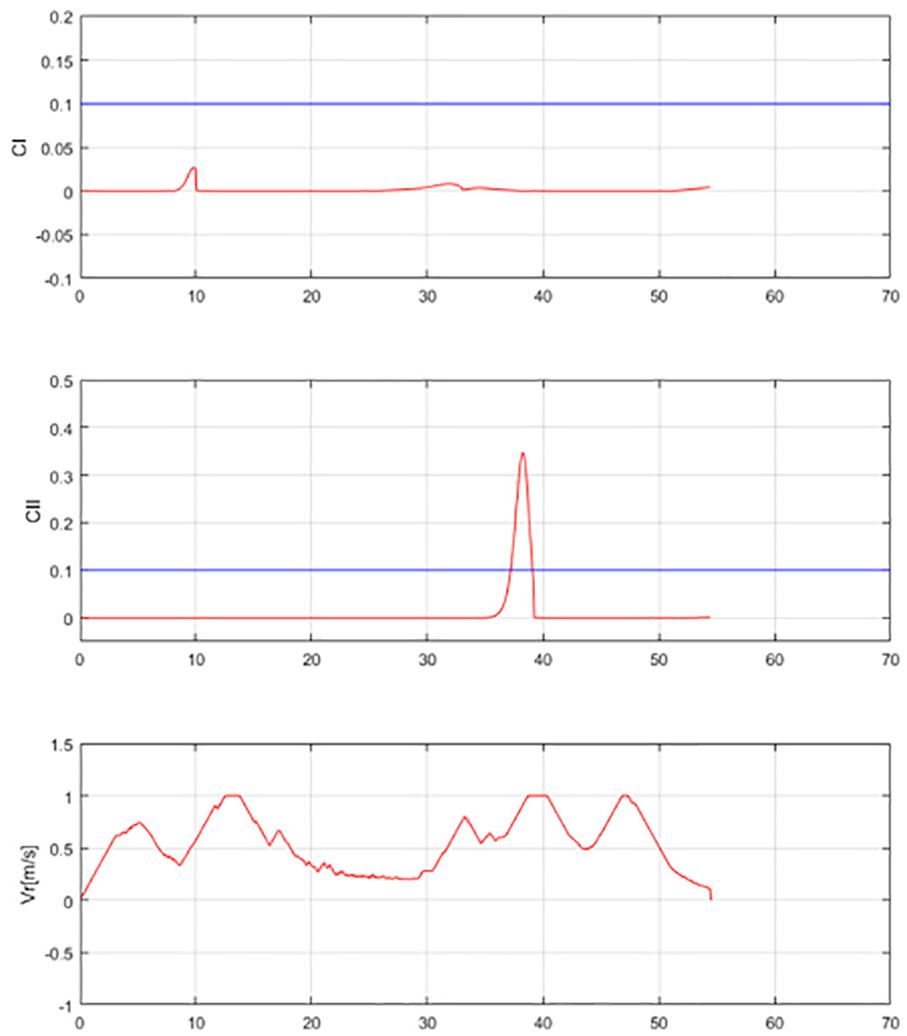
Conventionally, autonomous robot treats both human and an object as obstacles in Figure 12. Regardless of personal moving trajectory, robot reaches to the vicinity of human. At this moment, CI value is greater than 0.3 which violates the safe threshold as Figure 13. Particularly, in the scene of avoiding two standing humans, mobile robot travels at 0.8 m/s since it is not restricted by interactive space and does not need to maintain the safe distance. CII peaks at 0.9 when robot enters the personal space. It means that the robot’s navigation hinders the interactive process. In other way, it is effective to utilize Dynamic Window Approach so that robot nearly stops to wait for human’s moving, later it accelerates after passing and tends to target location where contacts to interactive space of three humans.
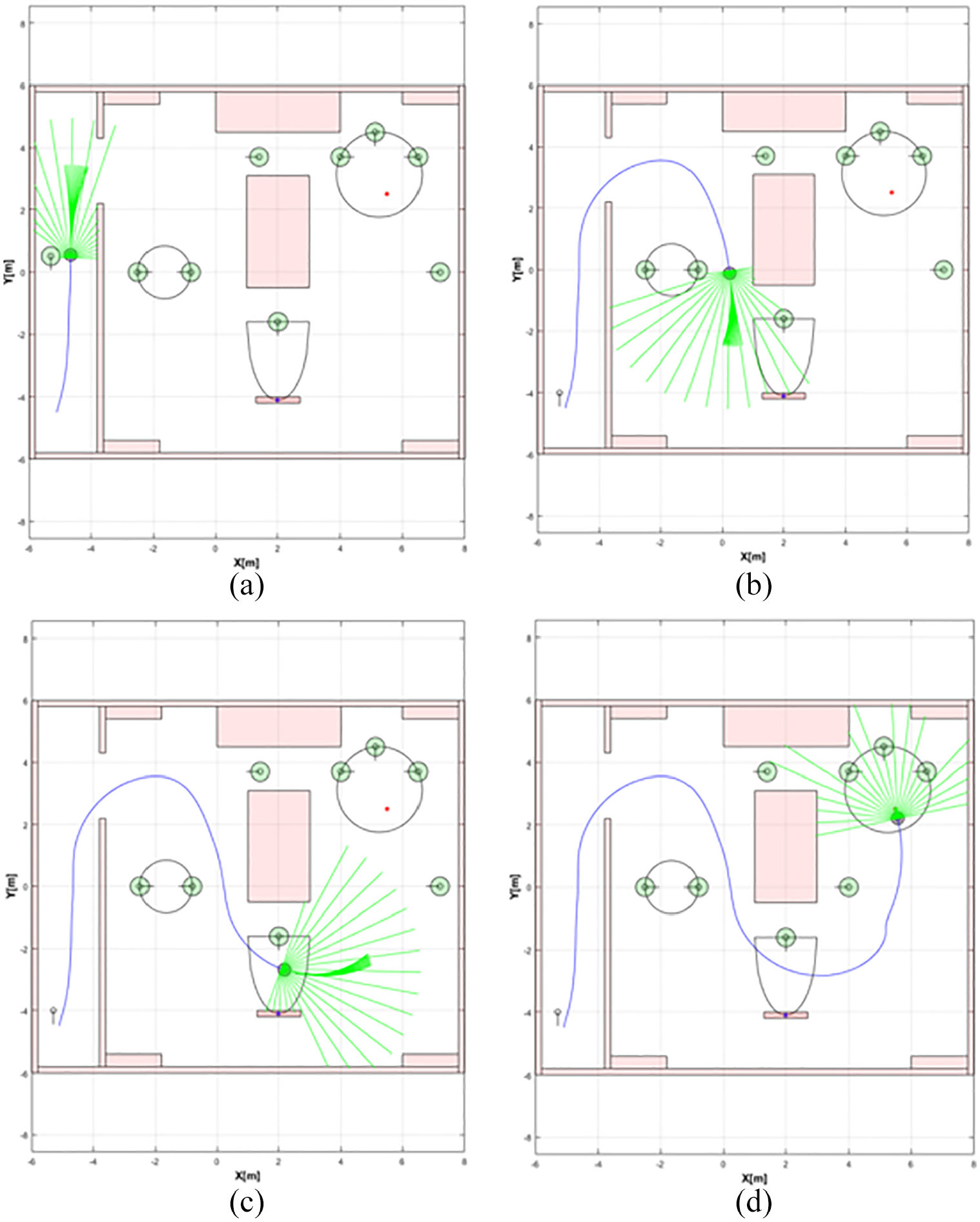
Graphical performance of mobile robot’s navigation without human-aware framework: (a) robot avoid collision with one person, (b) robot finds the free space between obstacle and human, (c) robot crosses the personal space of one person, and (d) robot violates the personal space of a group. (available at shorturl.at/hvCLV).

Result of mobile robot’s navigation without human-aware framework.
With respect to human’s state, the establishment of personal space and social interactions is considered in Figure 14. The robot’s behavior is significantly dissimilar owing to human-aware framework. Robot keeps away from human’s moving that contrarily travels in the same corridor, preserve proper distance with low CI value (<0.05). Far ahead, person

Graphical performance of mobile robot’s navigation with model of extended personal space: (a) robot passes one person, (b) robot navigates in front of two persons, (c) robot crosses the personal space of one person, and (d) robot stops before violating the personal space of a group. (available at shorturl.at/jGLRW).
Result of mobile robot’s navigation with model of extended personal space.
In combination of extended personal space and social interaction space to create the dynamic social zone, the graphical demonstration of robot’s navigation is shown in Figure 16. In this case, the result of treatment for standing person or human’s moving is equivalent to those in extended personal space. The differences in dynamic social zone are that social interaction space is taken into account. Consequently, these distinguished results exactly perform the interactive spaces in real-world scene. This navigation algorithm assists robot to prevent successfully the socially and comfortably interactive zone. It is clearly mentioned in the result with low values of indicators (

Graphical performance of mobile robot’s navigation with model of dynamic social zone: (a) robot passes one person, (b) robot navigates in front of two persons, (c) robot avoid crossing the personal space of one person, and (d) robot stops before violating the personal space of a group. (available at shorturl.at/gkEV2).

Result of mobile robot’s navigation with model of dynamic social zone.
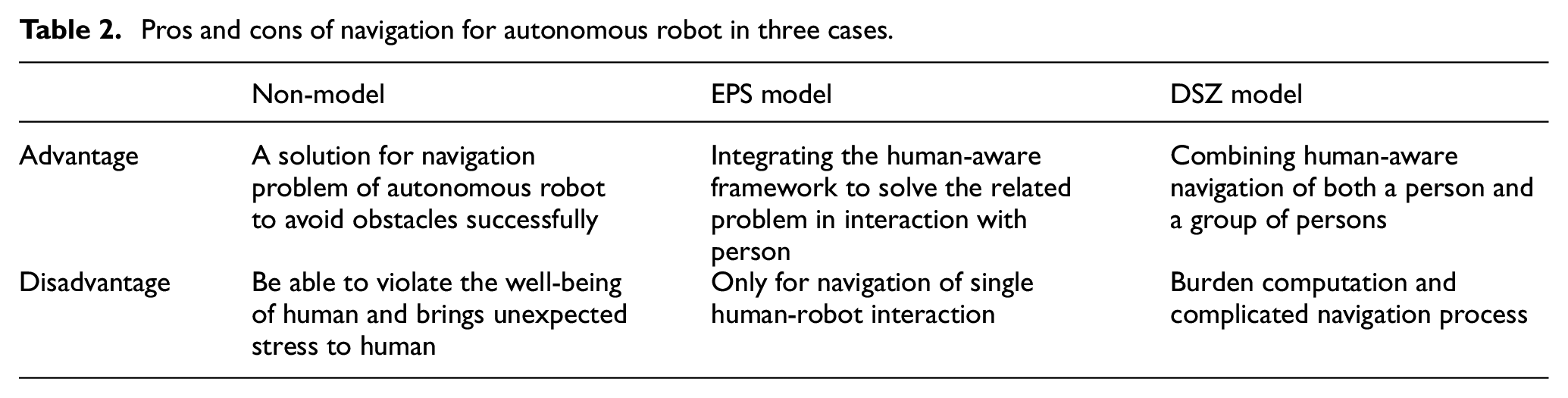
Through this study, it is crucial to indicate the differences among these models. Hence, in the same test scenario, three models have been validated respectively. The comparative performance of output indexes (CI and CII) is chosen to perform the different characteristics. In Figure 18, the results of CI index for the physically safe distance are shown in three cases. Without any model of human-aware framework, CI index is larger than 0.35. It also means that it is double times of safe threshold. If the human-aware navigation is implemented, value of CI is less than 0.05 which ensure the safe distance when robot works in vicinity of human. Similarly, Figure 19 specifies the performance of CII index among test cases. From these results of CII values, non-model is greater than threshold while the extended personal space model still exists highly. In superior case of dynamic social zone model, it is respected not to break the safe thresholds and guaranteed the safety and comfort of a person or a group of persons when autonomous robot approaches to. Table 2 shortly describes the comparative explanations among three models.

Comparative results of CI index for human-aware navigation of mobile robot using Dynamic Window Approach and Optimize Cost function in three test cases: non-model, extended personal space model, and dynamic social zone model.
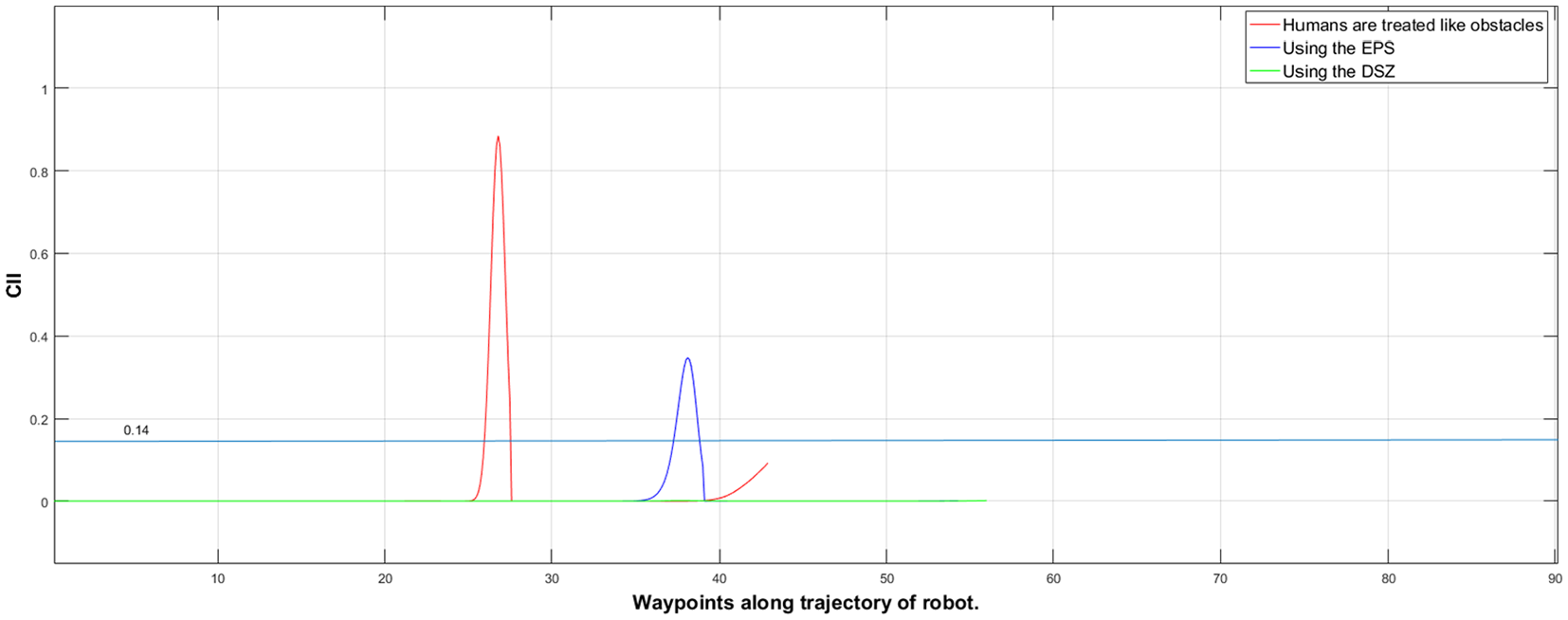
Comparative results of CII index for human-aware navigation of mobile robot using Dynamic Window Approach and Optimize Cost function in three test cases: non-model, extended personal space model, and dynamic social zone model.
Pros and cons of navigation for autonomous robot in three cases.
The implementation of proposed approach is described in Figure 20 which robot model is firstly built on Gazebo 34 and Robot Operating System (ROS) 35 integrated platform as Figure 20(a) and hardware platform is then experimented as Figure 20(b). Gazebo simulator provides several extremely useful functionalities in order to launch features and properties similar to a real-life environment such that sensing devices consisting of digital Kinect sensor and laser scanner with real-time simulated data that observed in the testing area, physical characteristics of mobile robot and environment, that is, frictions or inertial moment. In the laboratory tests, the multifunctional autonomous robot (MAR)36,37 is attached a digital camera Kinect and a laser scanner sensor. The powerful camera Kinect contains an infrared light projector, depth sensor, 640 × 480 pixels resolution of camera and a multi-array microphone. Laser scanner UGR-04LX-UG01 supports precise distance measurement up to 6 m in the angular field of view 240°.
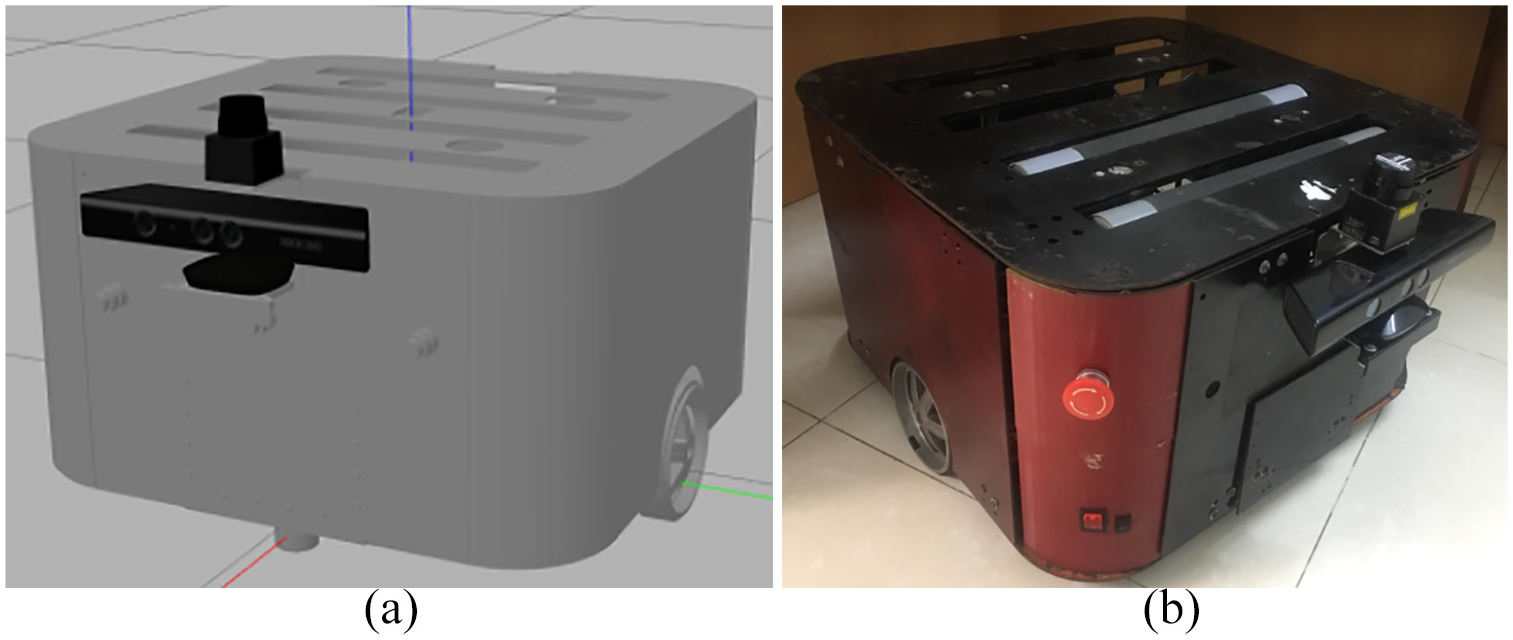
Realization of proposed approach: (a) 3D simulation and (b) practical implementation.
To examine and validate the feasibility of our human approaching framework, we have implemented and tested it on MAR mobile robot platform. Various test scenarios in an office-like environment to verify whether the mobile robot could evaluate and predict appropriate target, and then navigate safely, comfortably and socially to reach single person and a group of persons. In the first experiment, it is recommended to qualify the proposed framework when a human is stationary. The ROS-visualized scenario including the evaluated reaching method and path planning is presented in Figure 21(a). Also, the real-world test is resulted as Figure 21(b) in order to employ our approach into working area. As seen in these figures, MAR platform is successfully computed the reaching pose, and then driven to approach stationary human while avoiding the obstacle. In next experimental scenario, the effectiveness of the proposed framework is proved when humans appear in front of mobile robot. In Figure 22(a) and (b), the visualized results and practical results of reaching humans are shown respectively. Actually, there exist the tolerances of target location and target angle. The tolerance of two encoders attaching in wheels is 0.8° which causes to the robot navigation being biased to one side. Besides, the orientational shifting of the cost-map building technique using 2D laser scanner with angle resolution 0.352°. Thus, the robot did not perfectly approach the desired location because of its hardware specification. In short, these experiments demonstrate that our proposed reaching human framework is highly proper to enable the mobile robot to approach safely, socially and comfortably a human and a group of humans in the real-world applications.
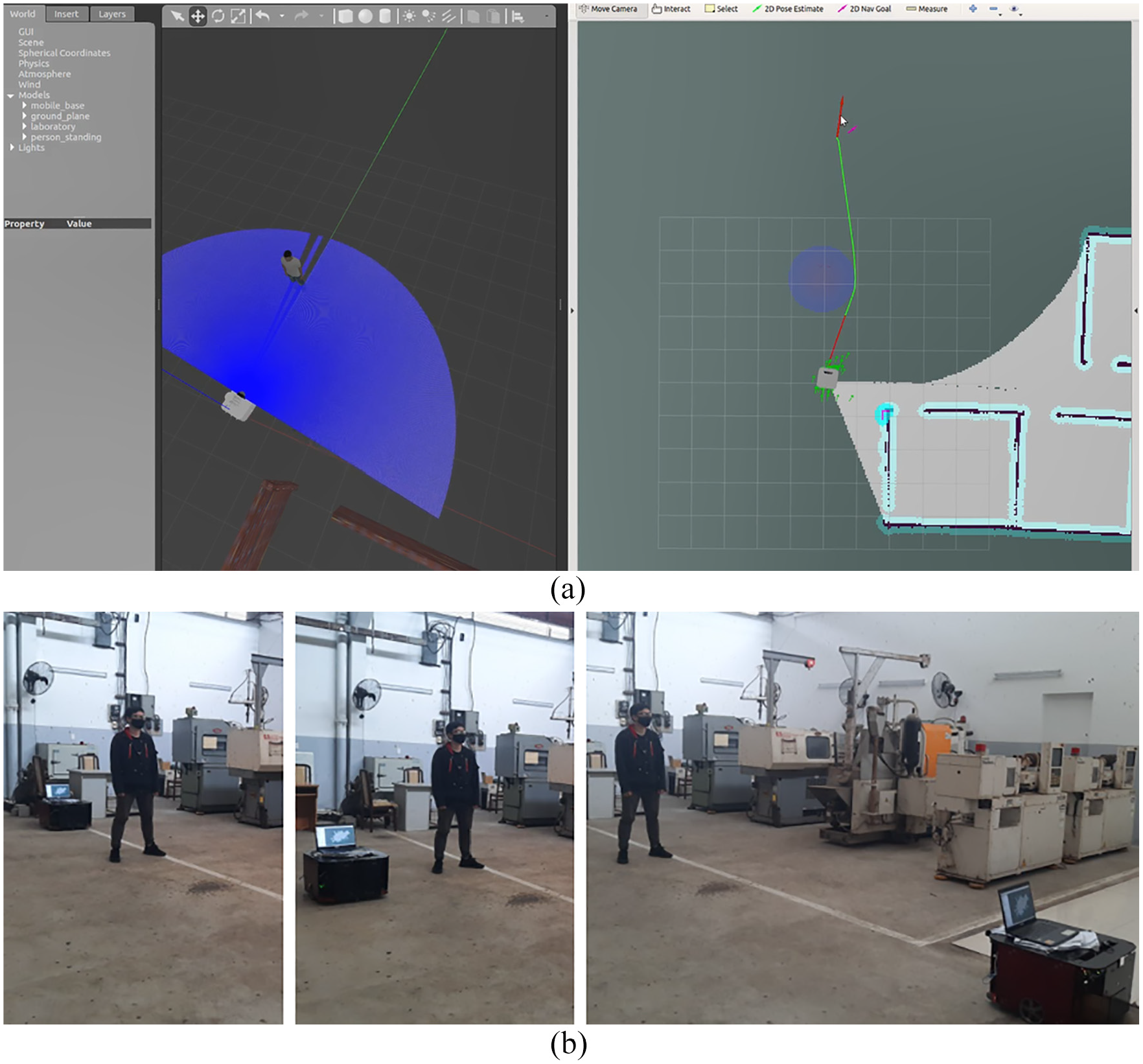
Human-aware navigation framework by Dynamic Window Approach and Optimize Cost function for single person: (a) snapshots of ROS visualization when robot in front of a human starts navigating and planning the motion trajectory and (b) experimental results of case 1 when robot reaches to stationary single human (available at shorturl.at/drwK5).

Human-aware navigation framework by Dynamic Window Approach and Optimize Cost function for a group of persons: (a) snapshots of ROS visualization when robot in front of humans starts navigating and planning the motion trajectory and (b) experimental results of case 2 when robot reaches to a stationary group of two humans (available at shorturl.at/imqP1).
Conclusion
In this paper, a novel comfortable safety framework using Dynamic Window Approach technique and Optimize Cost function for mobile robot in community’s environment is presented. Based on typical personal space, human-aware navigation system take account into human’s state to perform more proper and practical model in medical service area. The motion planner continuously generates the reference trajectory while laser-based method that employing the prediction of motion model, identifies human or a group of humans. The contributions of this research are that (i) human-aware navigation system using Dynamic Window Approach and Optimize Cost function is proposed instead of traditional methods, (ii) different impacts on three models are proved via three interactive indicators, and (iii) pros and cons of this navigation system in healthcare service are included.
It is believed that, to the best of our knowledge, this work is the first wide-ranging research in aspects of human-aware navigation for healthcare service. Future works are a must. In dynamic environment, chaotical phenomenon in robotics control should be considered. A vision-based technology to detect whether target human is normal health, patient or elder needs to be investigated. Besides, artificial intelligence could be implemented into cyber knowledge of robot to carry out more excellent performances.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is funded by Ho Chi Minh City University of Technology – VNU-HCM under grant number T-CK-2020-27. We acknowledge the support of time and facilities from Ho Chi Minh City University of Technology (HCMUT), VNU-HCM for this study.