
Abstract
Medical steerable needles can follow 3D curvilinear trajectories to avoid anatomical obstacles and reach clinically significant targets inside the human body. Automating steerable needle procedures can enable physicians and patients to harness the full potential of steerable needles by maximally leveraging their steerability to safely and accurately reach targets for medical procedures such as biopsies. For the automation of medical procedures to be clinically accepted, it is critical from a patient care, safety, and regulatory perspective to certify the correctness and effectiveness of the planning algorithms involved in procedure automation. In this paper, we take an important step toward creating a certifiable optimal planner for steerable needles. We present an efficient, resolution-complete motion planner for steerable needles based on a novel adaptation of multi-resolution planning. This is the first motion planner for steerable needles that guarantees to compute in finite time an obstacle-avoiding plan (or notify the user that no such plan exists), under clinically appropriate assumptions. Based on this planner, we then develop the first resolution-optimal motion planner for steerable needles that further provides theoretical guarantees on the quality of the computed motion plan, that is, global optimality, in finite time. Compared to state-of-the-art steerable needle motion planners, we demonstrate with clinically realistic simulations that our planners not only provide theoretical guarantees but also have higher success rates, have lower computation times, and result in higher quality plans.
1. Introduction
Steerable needles are highly flexible medical devices able to follow 3D curvilinear trajectories inside the human body, reaching clinically significant targets while safely avoiding critical anatomical structures (Alterovitz et al., 2005; Cowan et al., 2011; Park et al., 2005; Webster et al., 2006). Compared with traditional rigid medical instruments, steerable needles can reduce a patient’s trauma, increase safety, and provide minimally invasive access to previously inaccessible targets. Steerable needles have been considered for a wide range of diagnostic and treatment procedures including biopsy, drug therapy delivery, and radioactive seed implantation for cancer treatment (Abolhassani et al., 2007).
Direct manual control of steerable needles can be unintuitive and impractical for human operators due to the nonholonomic constraints on the needle’s 3D motion and the cluttered nature of anatomical environments. Thus, automation is critical to harnessing the full potential of these needles and enabling physicians to maximally leverage their steerability and ability to accurately and precisely reach targets. To automate steerable needle procedures, physicians first obtain a medical image (such as a computed tomography (CT) or magnetic resonance imaging (MRI) scan) of the relevant anatomy, from which we can segment (manually or automatically) the relevant anatomy, including the target to reach and obstacles to avoid. The next key ingredient to the automation of steerable needle procedures is motion planning, which requires computing feasible motions to steer the needle safely around the anatomical obstacles and to the target. Examples of scenarios of lung and liver biopsies are shown in Figure 1 (top).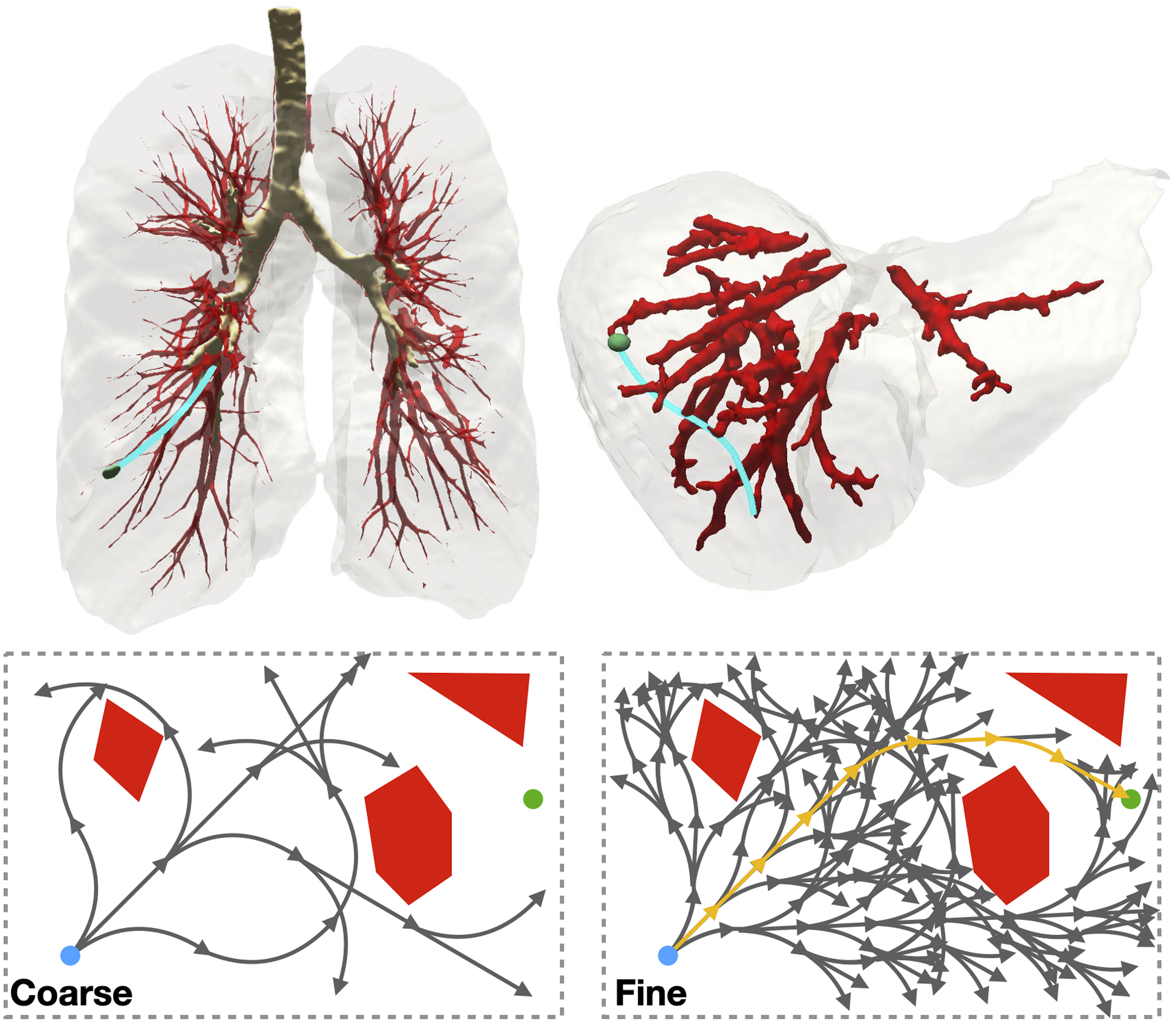
For the automation of medical procedures to be clinically accepted, it is critical from a patient care, safety, and regulatory perspective to certify the correctness and effectiveness of the algorithms involved in procedure automation. To this end, a motion planner should first guarantee that it will compute a solution, when one exists, in finite time, or notify the user that no solution exists. Moreover, the computed solution should strive to maximize patient safety, which can be quantified using metrics such as minimizing trajectory length (Favaro et al., 2018), maximizing clearance from obstacles (Agarwal et al., 2018; Kuntz et al., 2015; Strub and Gammell, 2021; Wein et al., 2008), and minimizing damage to sensitive tissue (Bentley et al., 2021; Fu et al., 2018). Thus, a motion planner for steerable needles should be complete, that is, find a solution plan in a finite number of steps, if one exists, and ideally should be optimal, that is, ensure that the returned plan has a cost (for a given cost metric) that is close to the global optimum. Unfortunately, no previously developed motion planner for steerable needles offers a formal guarantee on completeness, let alone optimality.
Although various motion planners have been proposed for steerable needles, those planners do not have theoretical guarantees for either returning a solution (Duindam et al., 2010; Favaro et al., 2018; Hauser et al., 2009; Patil et al., 2014; Pinzi et al., 2021; Seiler et al., 2012; Van Den Berg et al., 2010; Xu et al., 2008) or returning a solution that terminates within a clinically reasonable distance of the target (Liu et al., 2016) when a solution exists. Some prior motion planners for steerable needles do aim to optimize motion plan cost but they lack global optimality guarantees (Favaro et al., 2018; Favaro et al., 2021; Liu et al., 2016; Pinzi et al., 2019). Some sampling-based planners are known to be both complete and optimal, albeit those properties are usually proven only for an asymptotic regime where the number of samples tends to infinity (Hauser and Zhou, 2016; Karaman and Frazzoli, 2011; Kleinbort et al., 2018, 2020; LaValle and Kuffner Jr, 2001; Li et al., 2016; Salzman and Halperin, 2015; Solovey et al., 2020; Sun et al., 2015). Thus, it is unclear what should be the number of samples necessary to achieve those guarantees in practice. Recent work has developed optimality guarantees for finite sampling, although those results cannot be currently applied to steerable needles as they deal with holonomic systems (Dayan et al., 2021; Tsao et al., 2020).
Providing completeness and optimality guarantees for a steerable needle motion planner is challenging in part because motion planning for steerable needles in 3D with curvature constraints is at least NP-hard (Kirkpatrick et al., 2011; Solovey, 2020). This challenge inspires us to consider variants of completeness or optimality relevant to medical applications. Some variants that only offer asymptotic guarantees, such as probabilistic completeness and asymptotic optimality (LaValle, 2006), are not useful for needle steering since these guarantees only hold as computation time increases to infinity, but medical applications typically require guaranteeing the planner’s behavior within a finite time.
In this paper, we focus on specific types of guarantees relevant to real-world medical applications: resolution completeness (LaValle, 2006) and resolution optimality (Barraquand and Latombe, 1993; Pivtoraiko et al., 2009). Generally speaking, a resolution characterizes the discretization of some space (e.g., state space, configuration space, action space, and time). An algorithm is resolution complete if there exists a fine-enough resolution with which the algorithm finds a plan in finite time when a qualified solution exists, and otherwise correctly returns that no such plan exists. An algorithm is resolution optimal if it is resolution complete and if, when it does return a motion plan, the plan’s cost is guaranteed to be within a desired approximation factor of the cost of a globally optimal qualified motion plan. We illustrate at the bottom of Figure 1 an example showing searches with different resolutions for needle steering.
1.1. Contribution
In this paper, we first present Resolution-Complete Search (
Our overall contributions include (i) carefully defining the motion primitives (Frazzoli et al., 2002) used by our planners, which are specifically tailored to our domain of 3D steerable needles (Section 4.1.1); (ii) introducing a set of domain-specific optimizations that improve the efficiency of the algorithm while maintaining resolution completeness and resolution optimality (Section 4.3); and (iii) providing a proof to show the resolution completeness and optimality of our methods (Section 5).
We demonstrate the performance of our planners in two clinically realistic scenarios where the needle should reach a target while safely avoiding obstacles (e.g., blood vessels). In the setting of (i) lung biopsy, the needle is deployed through a bronchoscope and must steer through the lung parenchyma (the tissue of the lung outside the bronchial tubes) and in the setting of (ii) liver biopsy, the needle is deployed into the liver through its anterior surface and must steer through the liver tissue. We compare in simulation our planner with several other steerable needle planners and demonstrate experimentally that
This work is the integration and extension of two conference papers (Fu et al., 2021b, 2022) where we introduced
2. Related work
Steerable needles have many different designs, including bevel-tip flexible needles (Cowan et al., 2011; Webster et al., 2006), symmetric-tip needles (DiMaio and Salcudean, 2003), needles with curved stylet tips (Okazawa et al., 2005), needles with tendon-actuated tips (Qi et al., 2014), programmable bevel-tip needles (Ko et al., 2011; Secoli and Rodriguez Y Baena, 2016), and fracture-directed waterjet steerable needles (Babaiasl et al., 2020). In this paper, we focus on bevel-tip flexible needles but our approach can be easily applied to any mechanical design as long as the major kinematic constraint to consider is the curvature of the needle trajectory.
2.1. Motion planning for steerable needles
Early work studied planning and control for steerable needles in the 2D plane (Alterovitz et al., 2007; Asadian et al., 2011; Bernardes et al., 2012; Reed et al., 2011). To fully utilize the capability of steerable needles, later work began to focus more on needle steering in 3D environments. Duindam et al. (2010) used inverse kinematics for planning but the planner was tested only with simple geometrically shaped obstacles and provides no theoretical guarantees.
Other planners built upon the probabilistic completeness guarantees of sampling-based methods such as the Rapidly-exploring Random Tree (
To avoid dealing with curvature constraints directly in the
Liu et al. (2016) proposed the Adaptive Fractal Tree (
Other methods focus on accounting for uncertainties during needle insertion but do not account for completeness (Hauser et al., 2009; Pinzi et al., 2021; Seiler et al., 2012; Van Den Berg et al., 2010). To summarize, to the best of the authors’ knowledge, none of the existing steerable needle planners provide provable guarantees on the planner’s completeness.
2.2. Resolution-complete motion planners
Generally speaking, an algorithm is resolution complete if it generates a plan to the goal whenever a solution exists at the maximal resolution and returns failure otherwise (Barraquand and Latombe, 1991). This property guarantees that given a predefined maximal resolution, the algorithm terminates in finite time and provides a deterministic result.
Barraquand and Latombe (1993) proposed a planner for single/multi-body mobile robots with nonholonomic constraints. They formally proved the planner is guaranteed to generate a solution path when the discretization of the search parameters is fine enough. This approach was later extended by Lindemann and LaValle (2006) to suggest a multi-resolution approach for 2D car-like robots. Both these works (Barraquand and Latombe, 1993; Lindemann and LaValle, 2006) serve as the algorithmic foundations of the planner we present in this paper.
Sampling-based planners (such as
2.3. Resolution-optimal motion planners
Resolution optimality earned little attention, possibly due to being rather complex to analyze mathematically, particularly for nonholonomic systems. Consequently, many planners developed for nonholonomic systems focus on asymptotic optimality instead (Gammell and Strub, 2021; Hauser and Zhou, 2016; Li et al., 2016; Shome and Kavraki, 2021).
The previously mentioned method of Barraquand and Latombe (1993) for resolution-complete planning with nonholonomic constraints is optimal with respect to the number of reverse maneuvers in the plan. Pivtoraiko et al. (2009) proposed the idea of motion planning using state lattices for field robots. Their state lattices planner is resolution optimal since the search is optimal for a graph of some resolution and the discrete state grid approximates the continuous space as resolution increases. Ljungqvist et al. (2017) later extended Pivtoraiko et al. (2009) for a general two-trailer system in 2D. They used a two-point boundary value problem (2pBVP) solver to generate a set of motion primitives connecting 2D grid points.
The aforementioned planners can be used to plan for 2D nonholonomic robots, but none account explicitly for the challenges of planning with curvature constraints in 3D. (The latter case is particularly challenging not only because of the higher dimensional search space but also because of the absence of boundary-value solvers.) Additionally, these planners are designed for large-scale workspaces (where the minimum radius of curvature is relatively small compared to the scale of the workspace), making them unsuitable for tasks where a high level of precision is required, such as for steerable needles.
3. Problem definition
In this work, we consider steerable needles that operate in a 3D workspace
We also need to consider the kinematics of the steerable needle. We specifically consider steerable needles that are highly flexible and have an asymmetric tip (e.g., a bevel) (Alterovitz et al., 2005, Cowan et al., 2011, Park et al., 2005, and Webster et al., 2006); the asymmetric tip exerts asymmetric forces on the tissue in front of the needle tip, and the high flexibility enables the needle to curve substantially at maximum curvature κmax as it moves through the tissue. Furthermore, rotating the needle axially at its base changes the direction of the needle’s asymmetric tip, enabling the needle to change its direction of steering. See Figure 2 for an illustration. The kinematics of a bevel-tip steerable needle. The needle can be inserted (characterized by ℓ) and axially rotated at its base (characterized by θ).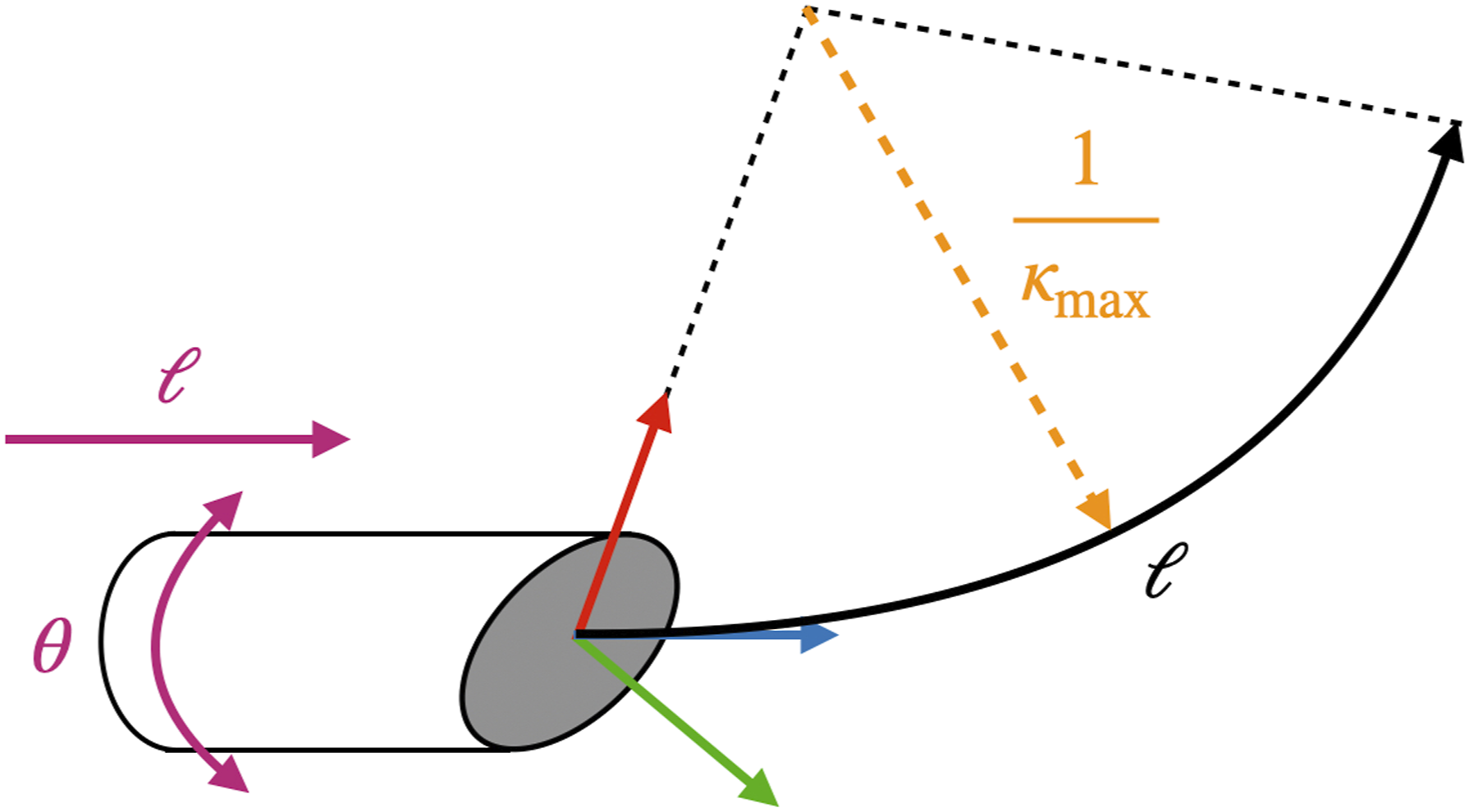
We say a motion plan is (kinematically) feasible if it never exceeds the maximum curvature κmax. A valid motion plan for the needle is both collision-free and feasible. We also assume there exists a resolution describing the smallest interval or precision of the achievable motions, which may be limited by the physical system’s hardware (e.g., motor, encoders, and controller) and its interaction with the environment. For the steerable needle application in this paper, we determine this finest resolution by considering the hardware’s ability to measurably change the steerable needle tip’s position and orientation in tissue, which includes parameters such as the minimum insertion distance and rotational direction change per controller time step, as defined in Section 4. Considering real-world effects such as torsional wind-up of the needle shaft during actuation, the control resolution of the needle tip is coarser than the control resolution of the needle base where motors directly apply controls. Thus, we are not using minimal motions of the motors. Instead, we consider the minimal motions the tip of the needle can perform. We assume there exists a lower-level controller capable of controlling the tip to the desired pose, as is common in needle-steering systems (Ertop et al., 2020; Rucker et al., 2013).
We are now ready to state two different problems considered in this work. The first problem calls for computing a valid motion plan for a given case while the second problem is formulated as an optimization problem with respect to the cost of a motion plan.
3.1. Steerable needle motion planning problem
A steerable needle motion planning problem is defined as the tuple
(i) σ is valid, (ii) σ(0) = (iii) trajectory length ℓ ≤ ℓmax, (iv) ‖Proj(σ(ℓ)) − pgoal‖2 ≤ τ.
As we show in our discussion (Section 5), for any given instance of Problem 1, under some mild assumptions, there exists some fine-enough resolution Rmin = (δℓmin, δθmin) (corresponding to the needle’s insertion and axial rotation, respectively) for which our proposed planner,
3.2. Optimal steerable needle motion planning problem
To evaluate the quality of a motion plan, we consider a configuration-based cost function

An optimal steerable needle motion planning problem is defined as an optimization problem, denoted by a tuple

subject to the same four conditions as in Problem 1.
Similarly, we will show in Section 5 that for any given instance of Problem 2, under some mild assumptions, there exists a fine-enough cutoff resolution Rmin = (δℓmin, δθmin) for which our proposed planner,
4. Method
In this section, we first describe the resolution-complete needle planner
4.1. Resolution Complete Search
Given our motion-planning problem, our needle planner builds a search tree
A key aspect of our search method (which is similar in nature to other search-based planners like Lindemann and LaValle (2006)) is to use a set of motion primitives defined using multiple resolutions. Instead of expanding each node in our search tree using the entire set of motion primitives, we start with coarse motion primitives and use finer motion primitives as the search progresses. Thus, we start (Section 4.1.1) by describing the parameters required to define a motion primitive. After that, we continue (Section 4.1.2) to detail a hierarchy of motion primitives together with an ordering that will be used in our search algorithm. We then describe our search algorithm in detail (Section 4.1.3) and elaborate on the method we use to handle “similar” states, also known as duplicate detection (Du et al., 2019) (Section 4.1.4).
4.1.1. Motion primitives
Motion primitives, introduced by Frazzoli et al. (2002), have been used in many motion planners (Islam et al., 2019, 2020; Lindemann and LaValle, 2006; Ljungqvist et al., 2017; Pivtoraiko and Kelly, 2011). In our setting, the motion primitives are a set of predefined kinematically feasible local motions. Roughly speaking, a motion primitive defines with what curvature the needle curves, how far the needle steers, and in which direction (see Figure 3). Since for each motion primitive, the curvature κ is explicitly defined, a motion primitive is guaranteed to be kinematically feasible as long as κ ≤ κmax. A motion primitive is a circular arc defined as 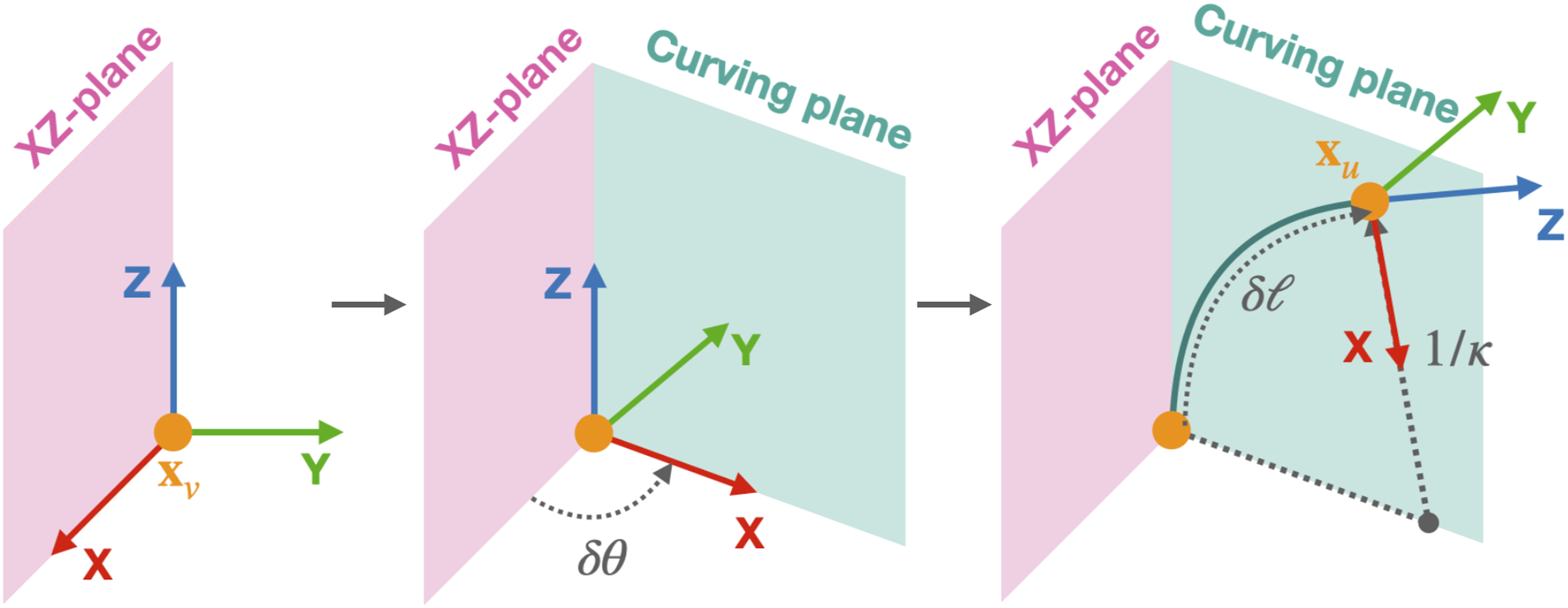
More formally, to steer from configuration
Using motion primitives allows pre-computing intermediate configurations and thus saving computation efforts during planning by transforming these configurations to the frame defined by
In the following sections, we show how δℓ and δθ are gradually refined by the algorithm. In contrast, we keep a fixed set of curvatures, {0, κmax}, for all motion primitives. As we will see (Section 5), this does not hinder the guarantees provided by our approach. Moreover, as we demonstrate in our experiments (Section 6), these primitives, coupled with our planners, allow us to efficiently compute paths for non-trivial instances where other planners fail.
4.1.2. Motion primitive hierarchy
Our algorithm uses a sequence of motion primitives, whose resolution changes from coarse to fine. The coarsest motion primitives are defined by parameters δℓmax and δθmax. In our implementation and examples (e.g., Figure 4), we have that δθmax = π/2 and δℓmax > 0 is a user-given parameter. Visualization of length and angle levels. 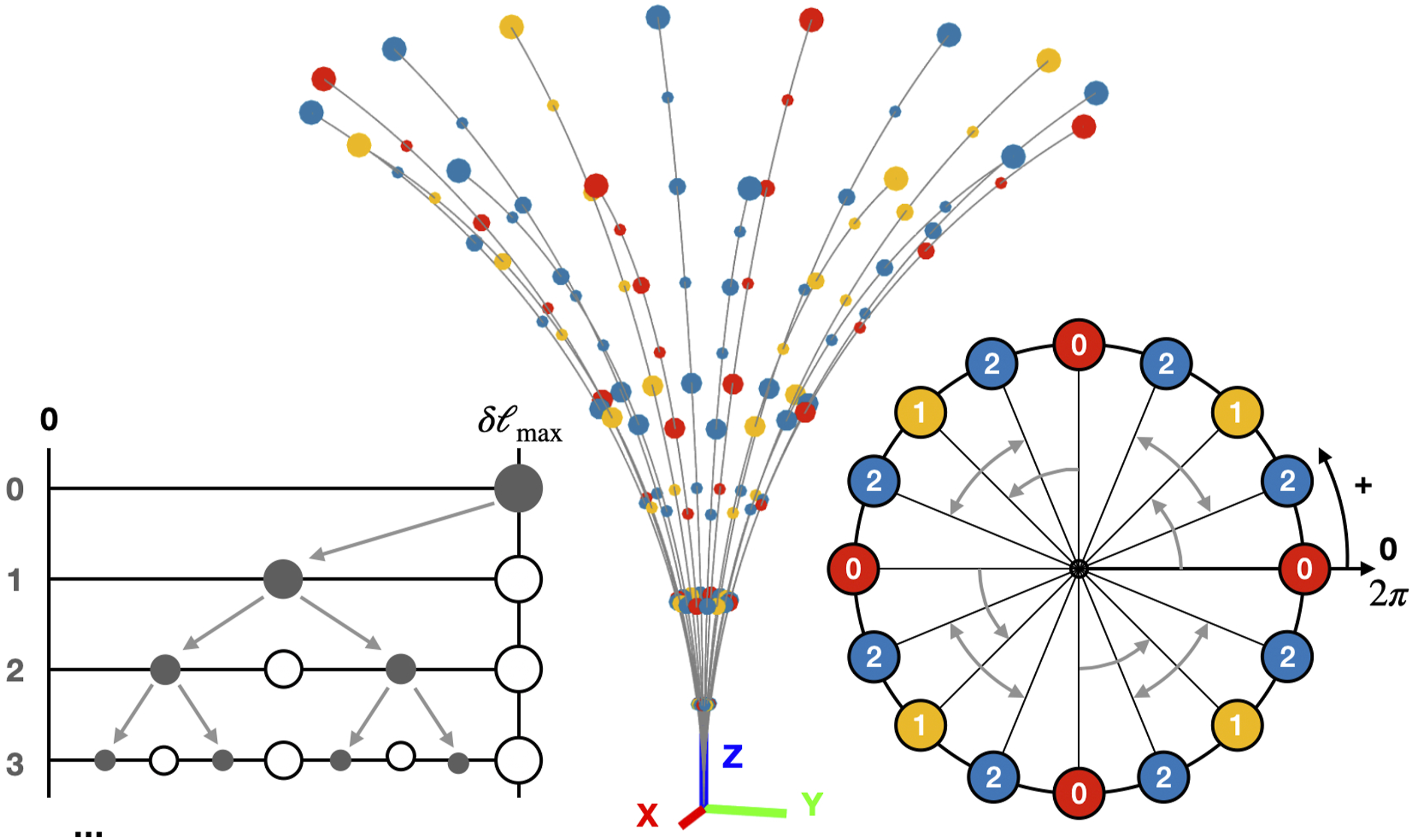
Since

For a motion primitive


Note that when refining a motion primitive with
Similar to Lindemann and LaValle (2006), our search algorithm expands nodes according to a node’s rank. Rank captures both the depth of a node in the search tree and the fineness of resolution along the branch connecting the node from the root. We define the rank of the root node to be zero, the rank of any other node v is recursively defined as: Nodes of the first four ranks. We use motion primitives with κ = 0 (straight lines) and κ = κmax (arcs with maximum curvature).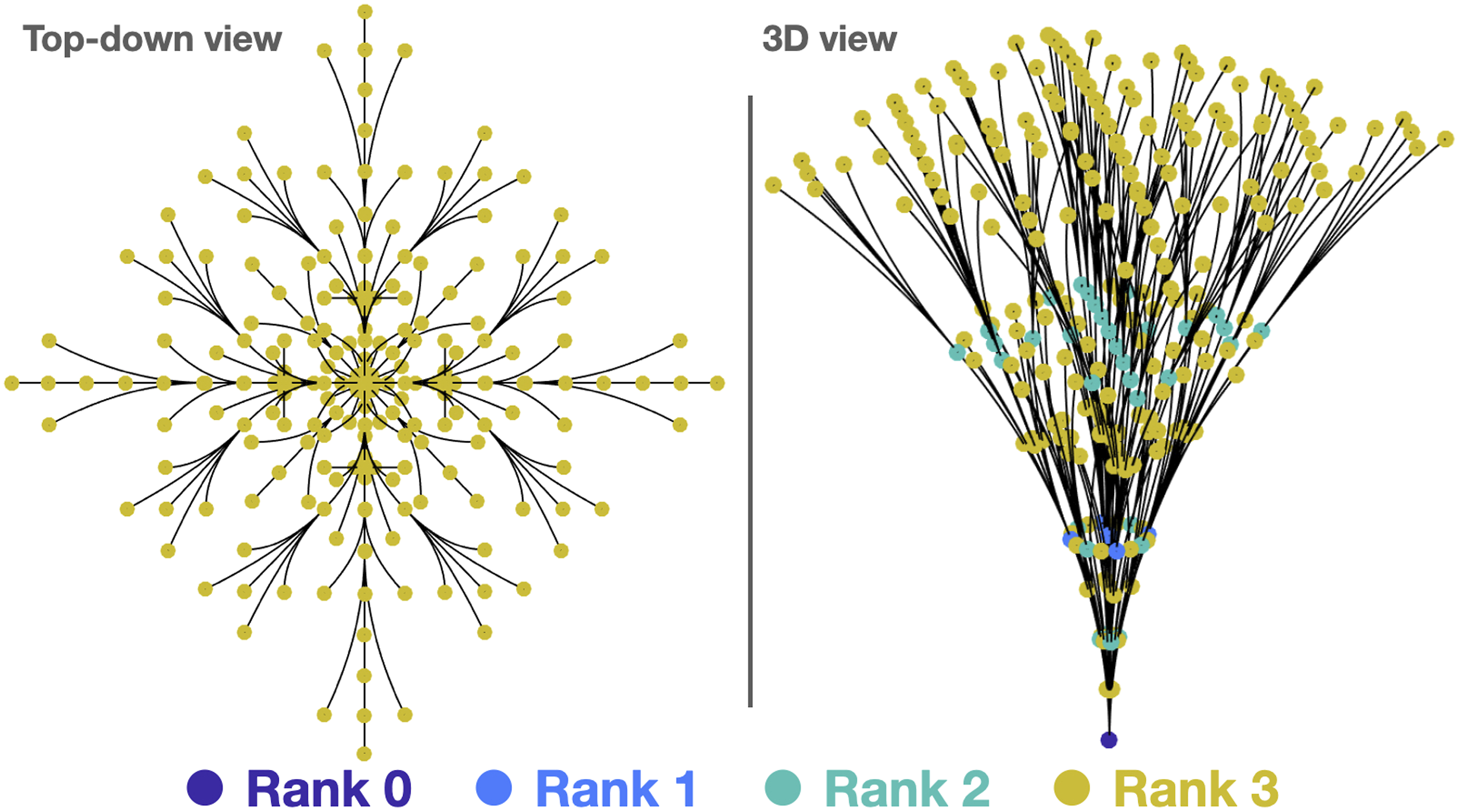

4.1.3. Algorithm description
We run an
Alg. 1 shows the pseudocode of our
Algorithm 1 ResolutionCompleteSearch (RCS)
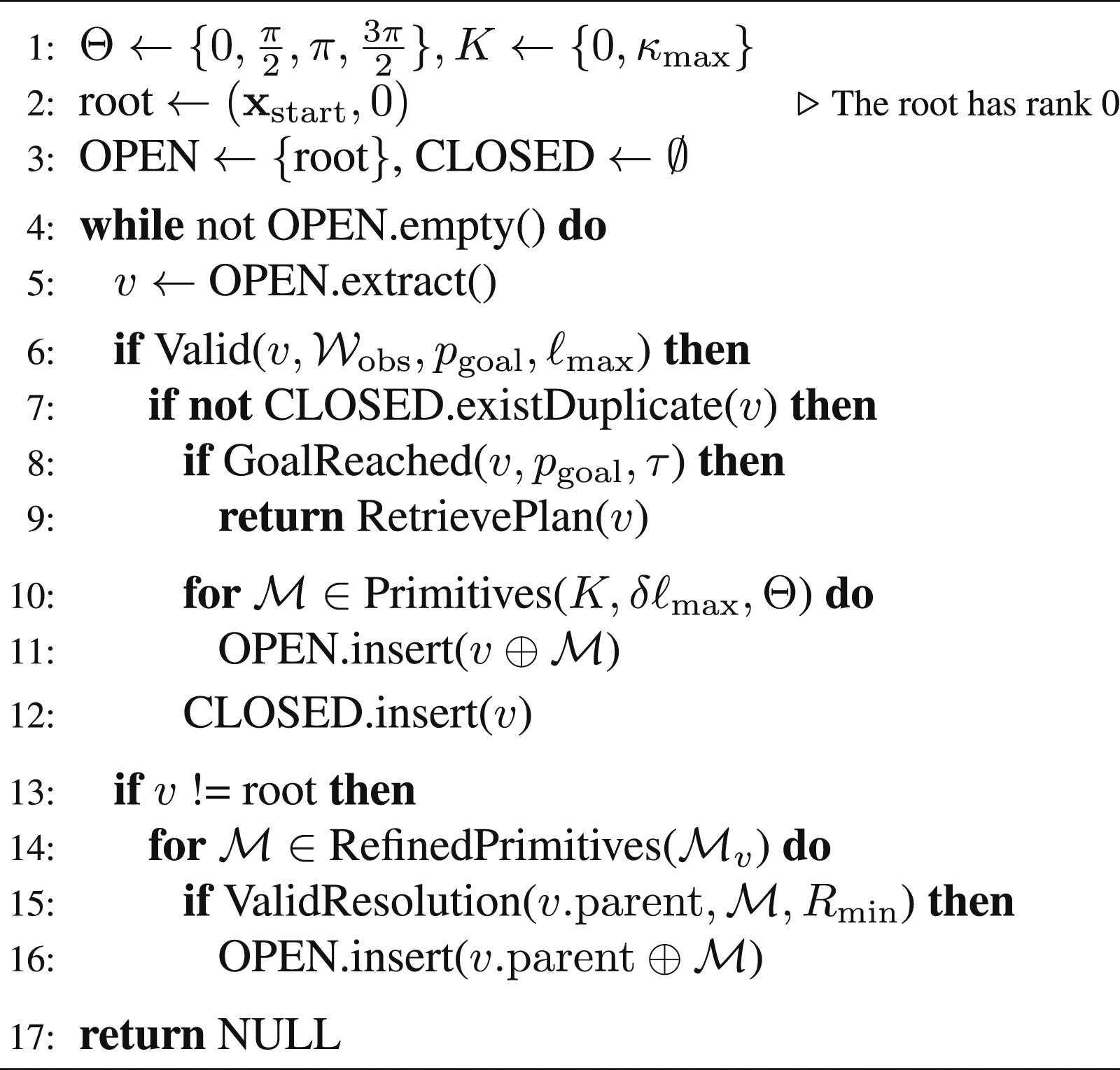
Only at this point (Alg. 1, line 6) the extracted node is validated. This is also known as lazy validation (Hauser, 2015; Mandalika et al., 2019). Validation of node v involves ensuring that: (i) the circular-arc trajectory connecting v.parent and v should be collision-free; (ii) the trajectory from the root to v is not identical to another node that only needs equal or coarser motion primitives to get to; and (iii) the accumulated trajectory length should not exceed the maximum insertion length ℓmax.
An invalid node will be rejected and discarded. For a valid node v, we further check if there exists any similar configuration in the CLOSED set in order to avoid considering equivalent or highly similar configurations (Section 4.1.4). A valid node without a similar configuration is accepted, expanded, and added to the CLOSED set (Alg. 1, lines 10–12). The search terminates if the associated configuration of the accepted node satisfies the goal tolerance.
In our search algorithm, only the coarsest child nodes are added to the OPEN list during the initial expansion of a node (Alg. 1, lines 10–11). But additional child nodes, created with finer motion primitives, are added when the coarse child nodes are extracted from the OPEN list (Alg. 1, line 16). More specifically, when node v is extracted, we refine its extending motion primitive
As specified in Section 3, for a physical needle-steering robot, there exists some smallest interval or precision of the achievable motions, which induces the minimal insertion and axial rotation δℓmin and δθmin, respectively. We term Rmin = (δℓmin, δθmin) as the cutoff resolution and stop adding refined nodes when the extending motion primitive
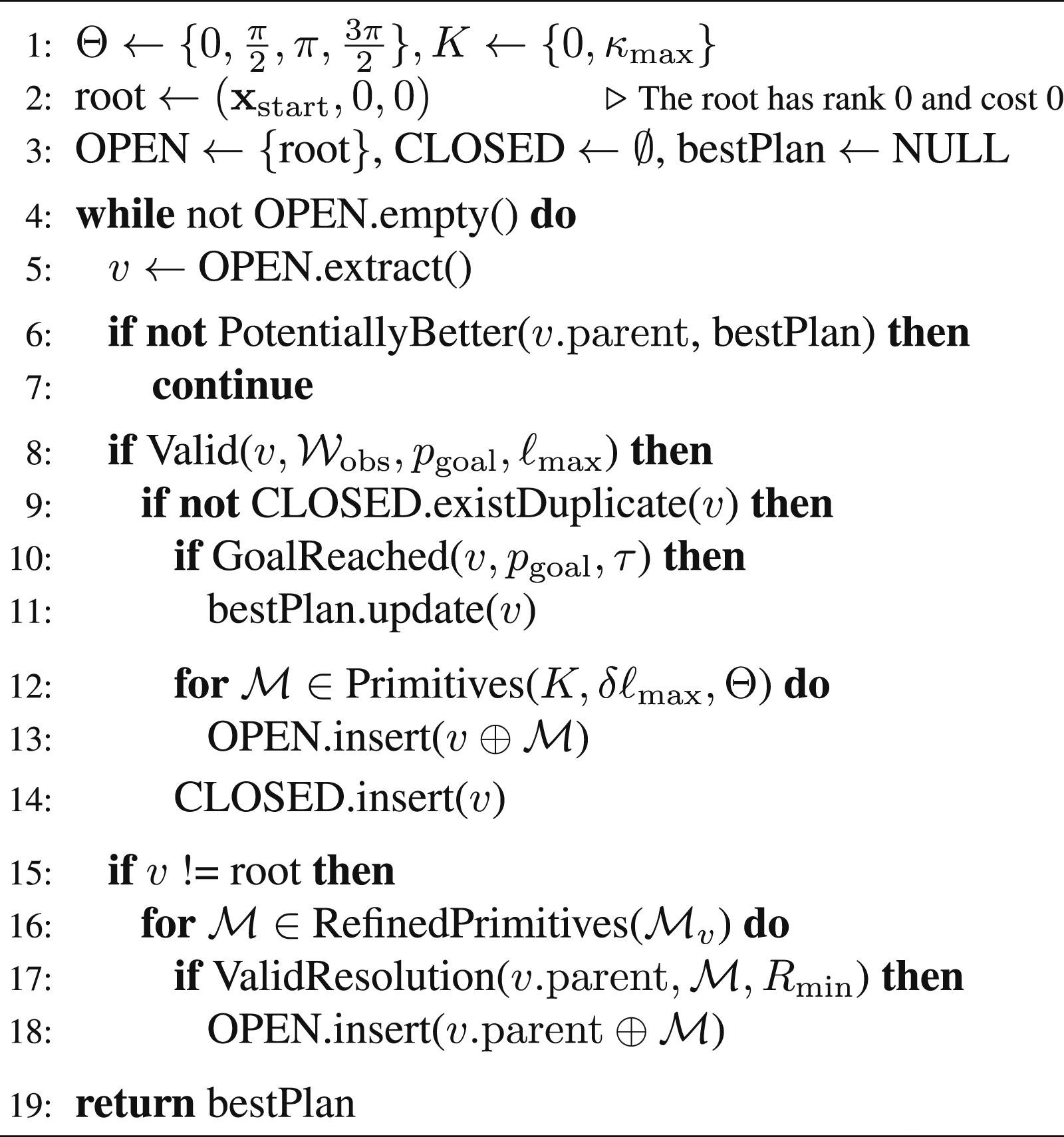
Algorithm 2 RCS*
4.1.4. Duplicate detection
To avoid re-expanding nodes with the same or highly similar configurations multiple times, search-based planners often employ duplicate detection (Du et al., 2019) that prunes so-called “duplicate” nodes. To prune duplicate nodes and enable the planner to rapidly explore the entire C-space, we reject a node if there already exists a similar configuration in the search tree (Alg. 1, line 7). More formally, we reject node v with configuration

4.2. A resolution-optimal version of RCS (RCS* )
Since
Similar to
We first introduce the essential differences that guarantee the resolution optimality of
4.2.1. Termination criteria
In
4.2.2. Cost-aware duplicate detection
Similar to
In Section 5, we determine the value of dsim. Note that in
4.2.3. Cost-aware node ordering
As is mentioned above,
In each iteration of
4.2.4. Node pruning
In addition to the node validation conditions in
4.2.5. Open node skipping
Since f(·) is only the secondary metric for ordering nodes in the OPEN list, it is possible that a node with a higher f(·) value is processed before a node with a lower f(·). Thus, when a node is extracted from the OPEN list, we first check whether the parent node still leads to a better motion plan (Alg. 2, line 6). Denote by C* the cost of the best plan found so far. Any node v in the search tree is not promising if
4.3. Domain-specific optimizations
We now describe several optimizations used to further speed up the planners.
4.3.1. Early pruning by testing for goal reachability
We can prune away nodes that, due to curvature constraints, cannot be part of a path that reaches the goal (see Figure 6 for a 2D illustration). The curvature constraint defines so-called “unreachable regions” of a node and testing if the goal pgoal belongs to a node’s unreachable region can be done efficiently (see Figure 6). Such nodes are pruned away and are not expanded.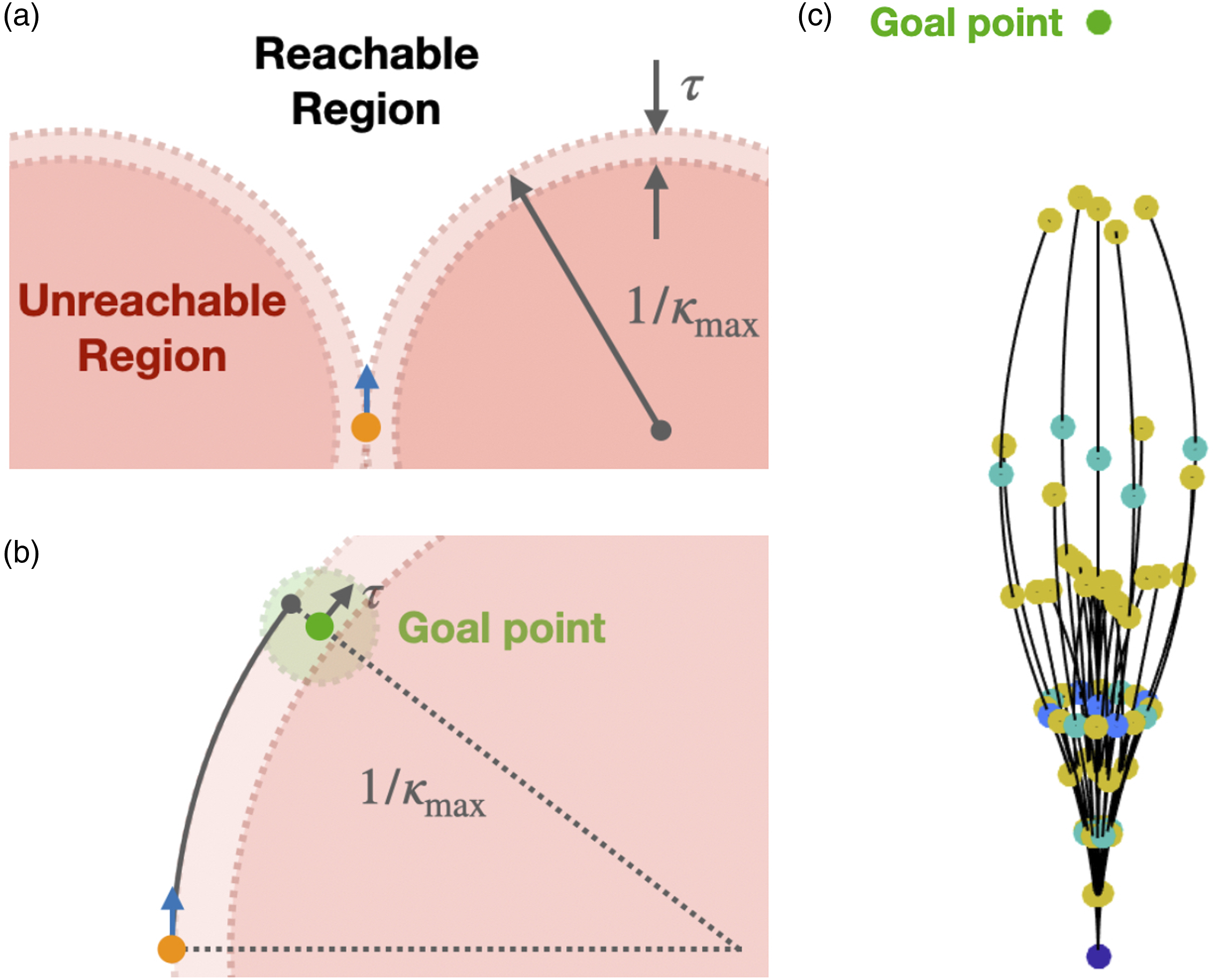
However, recall that we allow some goal tolerance τ. Thus, instead of requiring the goal point to be inside a node’s reachable region, we only require that the distance between pgoal and the boundary of the reachable region is smaller than τ.
Note that in our setting, the needle tip cannot (physically) turn more than 90° as the needle might buckle and shear through the tissue, so we discard such motions. Thus, we do not need to account for a needle entering the unreachable region due to a “U-turn.”
4.3.2. Direct goal connection
For each node v that is added to the search tree with corresponding configuration
If pgoal lies outside the reachable region of
4.3.3. Inevitable collision avoidance
We try to account for inevitable collisions (LaValle, 2006) to eliminate potential nodes that are bound to lead to collisions as they are expanded. In particular, for a given vertex v and the goal point, a “region-growing” process is performed from A 2D illustration of the approximated reachable workspace. The kinematically forward-reachable workspace is shaded red (a 3D version can be obtained by rotating the region around the tangent vector at 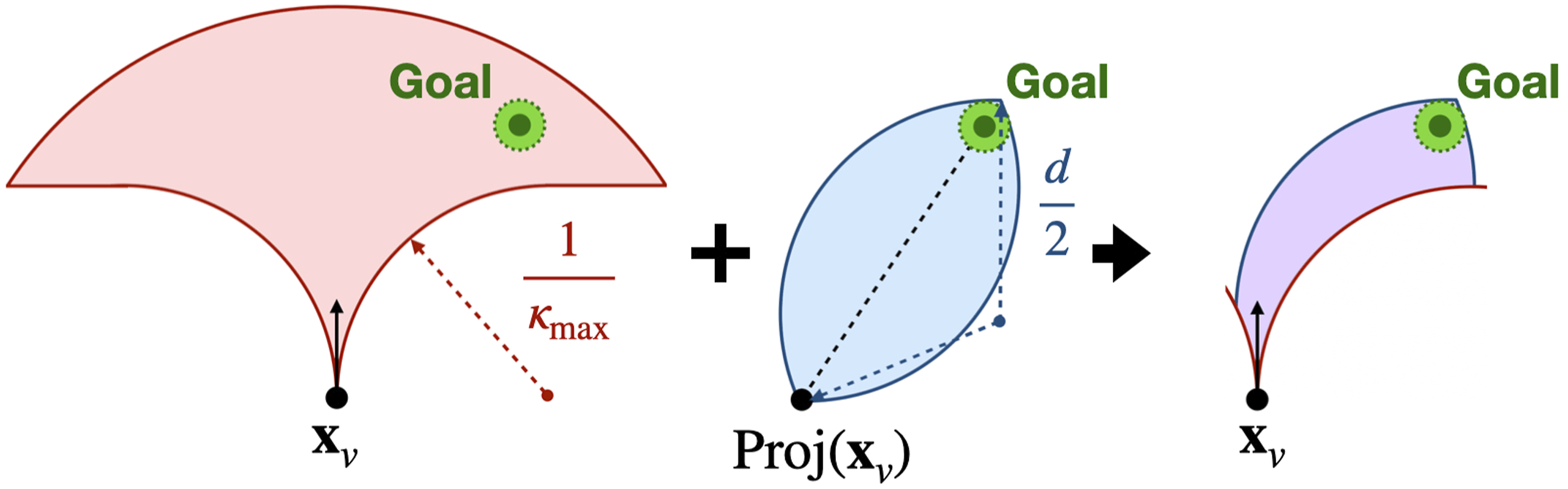
We mention that due to (i) maximum curvature constraint, (ii) maximum turning angle constraint (the needle would shear or buckle when turning over π/2), and (iii) maximum insertion length constraint, the kinematically forward-reachable workspace for a given needle configuration is a trumpet-shaped volume rooted at the current needle position (see Figure 7, left).
Additionally, a position in the workspace is potentially feasible only when there exists some orientation with which the goal region is forward reachable while the start point is backward reachable, considering the maximum curvature constraint. This defines the olive-shaped feasible workspace (see Figure 7, middle) since for any position outside the region, there is no orientation that is valid.
In the case that the goal is not reached by the grown region, v is considered to have an inevitable collision and thus to be invalid. Several examples are provided in Figure 8. Inevitable collision check allows us to efficiently identify and discard invalid branches. However, compared to previously mentioned optimizations, such inevitable collision checks can be computationally expensive and is an underestimation of the real inevitable collision. Thus, we only perform inevitable collision check when a direct goal connection fails, indicating there exist obstacles blocking the way toward the goal region. We also keep a record of states that successfully passed the inevitable collision check and skip the check when a nearby node has already passed the check, allowing us to sparsely check for inevitable collisions. 2D illustration of example cases for inevitable collision check. The connected region is shaded yellow, obstacle voxels are shaded pink. This is an underestimation of inevitable collisions so even if the goal is determined as reachable in the check, it is not guaranteed that a valid motion plan to the goal exists.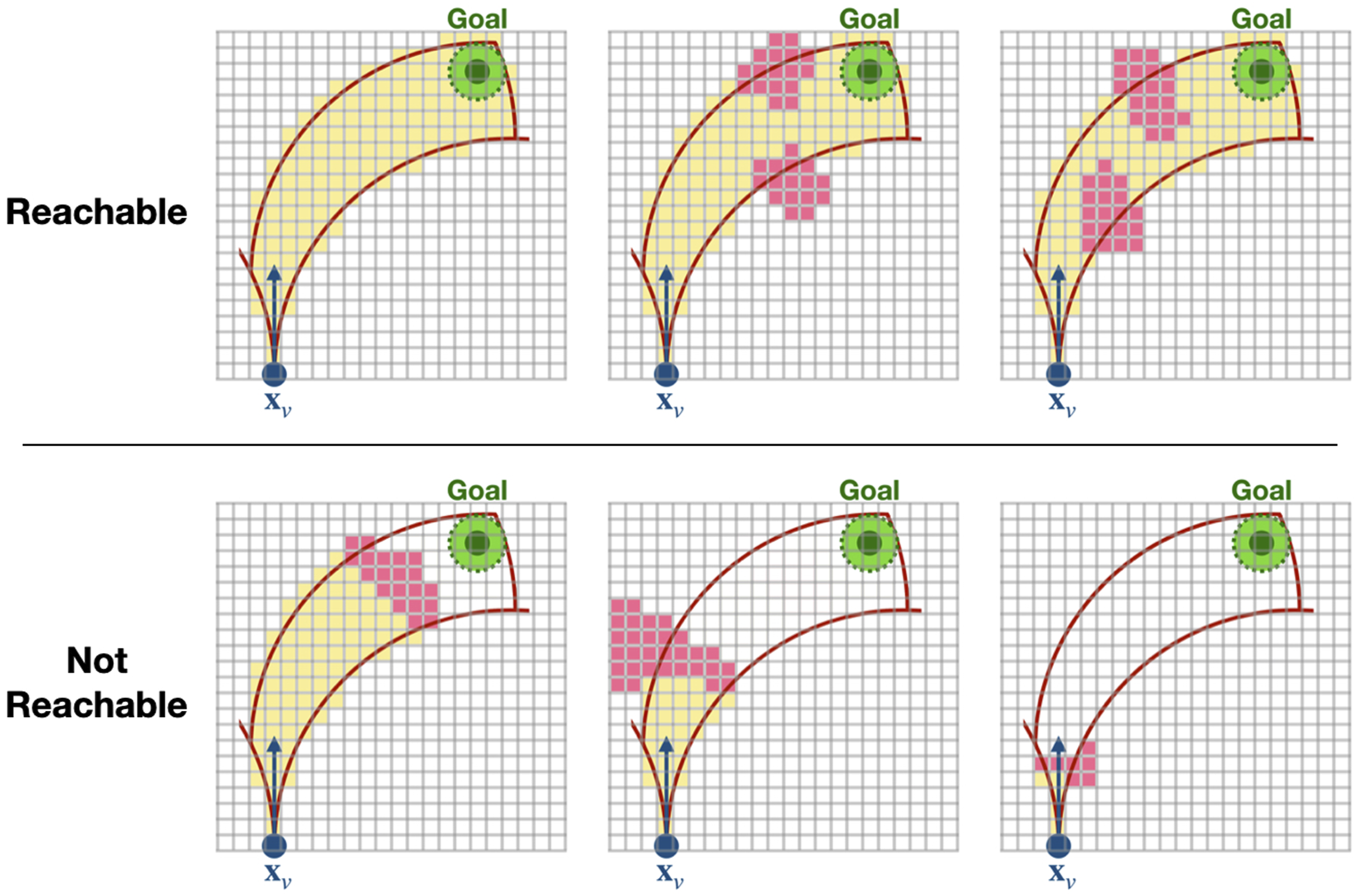
4.4. Parallelism
Our algorithms can be easily parallelized. One of the most time-consuming tasks in our search algorithm is processing a node after it is extracted from the OPEN list (namely, evaluating whether the path to this node is collision-free, and computing the relevant motion primitives for its parent node and the corresponding new nodes). To this end, we implemented a multi-threaded version of the algorithm where each thread is tasked with processing a node extracted from the OPEN list. This enables processing nodes in parallel while maintaining the correctness of the algorithm by adding standard locking mechanisms to the shared data structures (i.e., OPEN list and CLOSED set).

5. Theoretical guarantees
We study the theoretical properties of our proposed algorithms, namely,
5.1. General resolution-related definitions
We now introduce some general definitions of resolution, resolution completeness, and resolution optimality. These general definitions will help in understanding later discussions specific to
Resolution. Resolution is a finite set of parameters R = (r0, …, r
n
), where each r
i
∈ R characterizes the discretization of some dimension in some space (e.g., state space, configuration space, action space, and time), and a smaller number indicates a finer resolution on that dimension. We say that resolution
Resolution completeness. For a general motion planning problem Δ, a planner is resolution complete if when a so-called qualified solution to Δ exists, there exists some resolution Rmin such that running
Resolution optimality. For a general motion planning problem Δ, a planner
Clearly, the above definitions are more general intuitions than specific definitions for the needle-steering problem. We need to define what a “qualified solution” is and what “running
5.2. Resolution completeness of RCS and resolution optimality of RCS*
When narrowed down to the specific case for our steerable needle planners, the notion of resolution completeness and resolution optimality can be informally stated as follows: (i) Resolution completeness implies that (ii) Resolution optimality implies that
Thm. 1 and Thm. 2 given below state our main theoretical contribution relating to resolution completeness and resolution optimality, respectively. Before stating the main theorems, we introduce some definitions that are essential to state the assumptions in the theorems. Recall that
First, we provide a formal definition of Lipschitz continuity of the steerable needle system, which is used in (
Primitive-based metric
where
In the above definition, note that changing the initial configuration
Lipschitz continuous. The system is Lipschitz continuous if there exists some constant L
s
> 0 such that for any

We then introduce the notions of robust and decomposable trajectories, as well as a well-behaved cost, which will be used to state the necessary conditions on the approximated motion plan σ and cost function
We provide two definitions that are used to characterize motion plans that our algorithms can approximate. The first definition is concerned with trajectories that are induced by a finite set of motion primitives (not necessarily the ones used by
Decomposable trajectory. Let
Robust trajectory. A trajectory
(i) it has γ clearance from obstacles, that is, (ii) its endpoint is within a distance of τ − γ to the goal point, namely, ‖Proj(σ(l)) − pgoal‖2 < τ − γ.
Here,
We then define the notion of a well-behaved cost which states that close-by configurations have similar costs and that there are bounds on the values that the cost can attain.
Well-behaved cost. A configuration-based cost function c is well-behaved if
(i) it is Lipschitz continuous, that is, (ii)
In such a case, we also say that the trajectory-based cost function
We are now ready to state our main theoretical results concerning resolution completeness and resolution optimality.
Resolution completeness. Let
Then
The following is a stronger property that is concerned not only with finding a solution but also with finding a “good” one.
Resolution optimality. Let
Then
The above theorems can be generalized to approximate general solution trajectories that are not necessarily decomposable. In particular, since any solution trajectory has bounded curvature, it can be approximated in terms of spatial proximity and solution quality to any desired level of accuracy using a sequence of circular arcs. The latter sequence yields by definition a decomposable trajectory. Such an approximation of bounded-curvature trajectories using circular arcs (also known as biarcs) has been extensively studied in 2D (Hoschek, 1992; Meek and Walton, 1995; Sabitov and Slovesnov, 2010). Extending this argument to the 3D case is rather technical and therefore deferred to future work.
In the following sections, we provide proofs for Thm. 1 and Thm. 2. Both proofs follow two main steps. We first show that a decomposable trajectory σ can be approximated by another plan σ
ɛ
that is composed solely of the motion primitives used by
5.3. Approximation of decomposable trajectories
We temporarily set aside the study of our algorithms’ behavior and prove the following basic result showing that any decomposable trajectory can be approximated to any desirable degree by a finite sequence of motion primitives with fixed curvatures (discussed in Section 5.3.1) and fixed resolution (discussed in Section 5.3.2).
Before stating the theorem, we introduce notions related to trajectory approximations. We provide a formal definition of the notion of piece-wise strict ɛ-approximation. We first define this notion for a single local “piece” in the following definition, and then extend it to trajectories consisting of several pieces.
Local strict approximation. For two trajectories
(i) (ii) (iii)
Piece-wise strict approximation. For two trajectories
(i) (ii) (iii) ∀i ∈ [0, n − 1], the sub-trajectory
Additionally, it will be convenient to introduce the notion of a finest set of motion primitives.
Finest set of motion primitives. Given a resolution R = (r
ℓ
, r
θ
), and a set of curvatures K, we define the finest set of motion primitives as

We now state the following theorem about trajectory approximation.
Let σ be a decomposable trajectory and let ɛ > 0 be some real value. If the system is Lipschitz continuous, there exists a fine resolution R(σ, ɛ) = (r
ℓ
, r
θ
) and a finite sequence of motion primitives MR(σ,ɛ) ⊆ M
fs
(R(σ, ɛ), {0, κmax}) such that σ
ɛ
≔σ(0) ⊕ MR(σ,ɛ) is a piece-wise strict ɛ-approximation of σ. Moreover, when we also consider a cost function, if c is a well-behaved cost (characterized with L
c
, cmin, cmax), then the trajectory cost satisfies
We break the proof of this result into the following steps. In the following discussions, we refer to the parameters of
5.3.1. Approximating arbitrary curvatures using duty-cycling
As a first step, we show that any decomposable trajectory σ can be approximated arbitrarily well by a finite sequence of motion primitives whose curvature is either 0 or κmax. We provide a justification of this property below.
When a bevel-tip needle is inserted without rotations, it follows a trajectory with curvature κmax. When the needle is inserted while applying axial rotational velocity that is relatively larger than the insertion velocity, it follows a straight line (i.e., of curvature zero). Minhas et al. (2007) introduced the notion of duty-cycling to approximate any curvature for bevel-tip steerable needles. Roughly speaking, combining periods of needle spinning (i.e., zero-curvature trajectories) with periods of non-spinning (i.e., maximal-curvature trajectories) enables the needle to achieve any curvature up to the maximum needle curvature. This idea is formalized in the following lemma.
Approximating arbitrary curvatures using duty-cycling. Let σ be a decomposable trajectory and let ɛ
d
> 0 be some real value. There exists a finite sequence of motion primitives M
D
in which every element has curvature κ ∈ {0, κmax} such that the trajectory σ(0) ⊕ M
D
is a piece-wise strict ɛ
d
-approximation of σ.
As the trajectory σ is decomposable, there exists a sequence of motion primitives 
Namely, the first motion primitive
We then decompose Illustration of approximating arbitrary curvatures using duty-cycling. 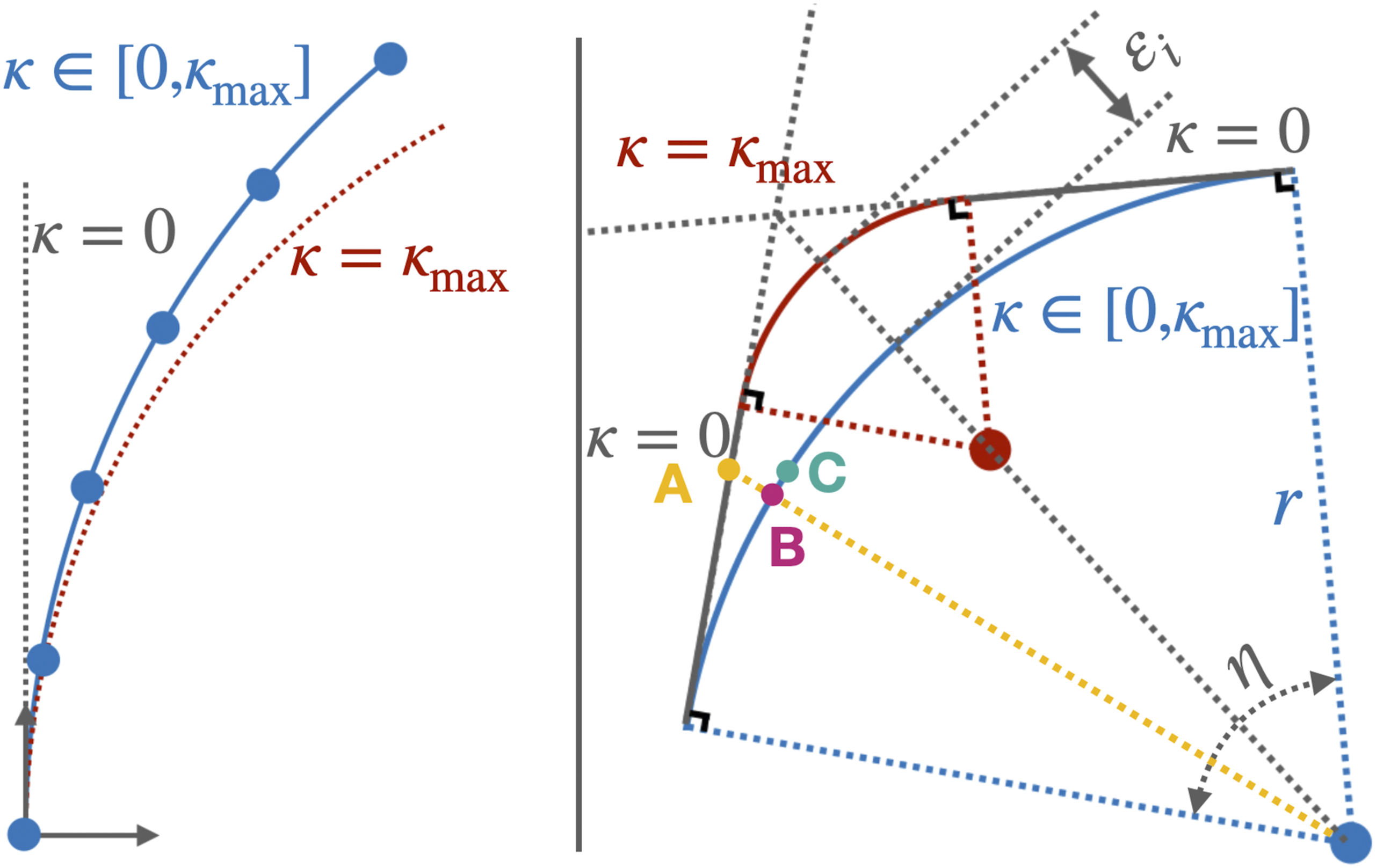
Let
5.3.2. Approximating curves using fixed-resolution primitives
After the previous step, a decomposable trajectory can be approximated by another decomposable trajectory with only 0 or κmax curvature, although the approximation might require different resolutions. Next, we further show that a decomposable trajectory can be approximated by fixed-resolution primitives.
Approximating curves using fixed-resolution primitives. Let σ be a decomposable trajectory and let ɛ
r
> 0 be some real value. If the system is Lipschitz continuous (Def. 5), there exists a fine resolution R(σ, ɛ
r
) = (r
ℓ
, r
θ
) and a finite sequence of motion primitives
To approximate each motion primitive 
Here, the first motion primitive
This is done for every motion primitive 
This is because given that both motion primitives have equal curvature, Illustration of the action distance between two motion primitives with the same curvature. Here, the shorter motion primitive lies in curving plane 1; thus, min{δℓ1, δℓ2} = OAcurv and |δℓ1 − δℓ2| = OCcurv − OAcurv = BCcurv. Meanwhile, the orientation difference between A and C satisfies dist∢(A, C) ≤ dist∢(A, B) + dist∢(B, C).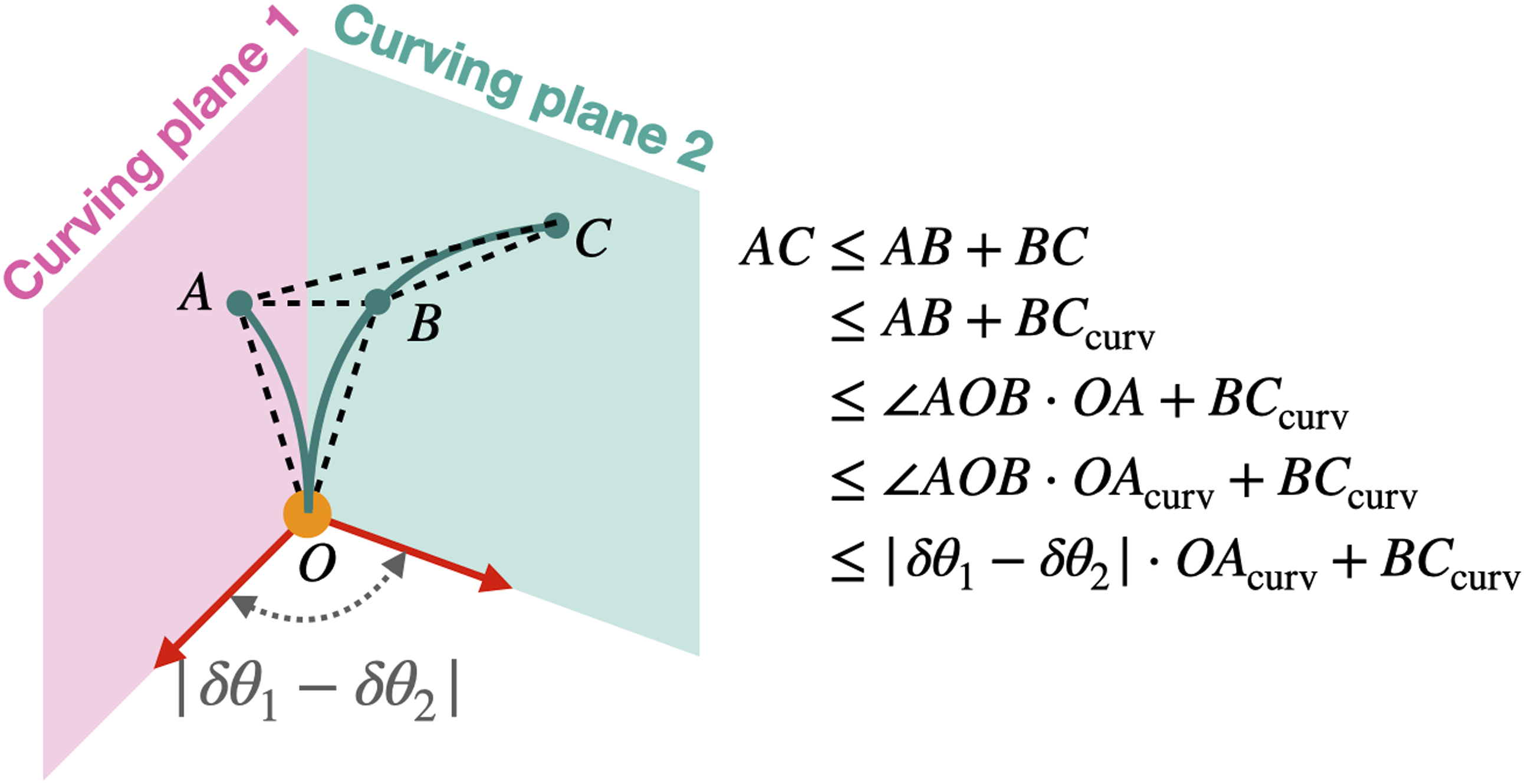
Since the system is Lipschitz continuous,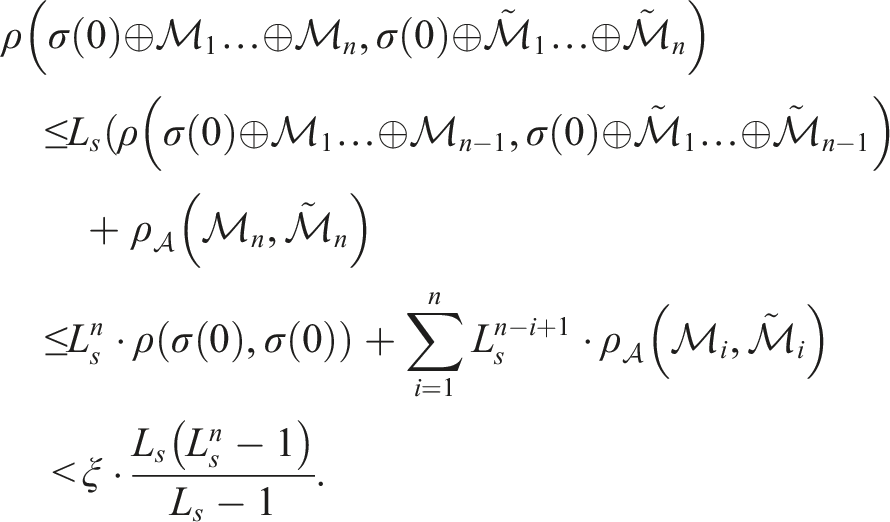
Thus, to ensure that
Having established Lem. 2, we can finalize the first part of Thm. 3. Namely, we carefully set ɛ d and ɛ r , so that the final result is a piece-wise strict ɛ-approximation.
Set
Note that by construction σ
d
is decomposable. Thus, according to Lem. 2, there exists a fine resolution R(σ, ɛ
r
) = (r
ℓ
, r
θ
) and a finite sequence of motion primitives
Finally, as
5.3.3. Similar cost for piece-wise strict approximations
To finish the proof of Thm. 3, we finally show that the approximation of σ also achieves a desirable cost.
Similar cost for local strict approximations. If a trajectory
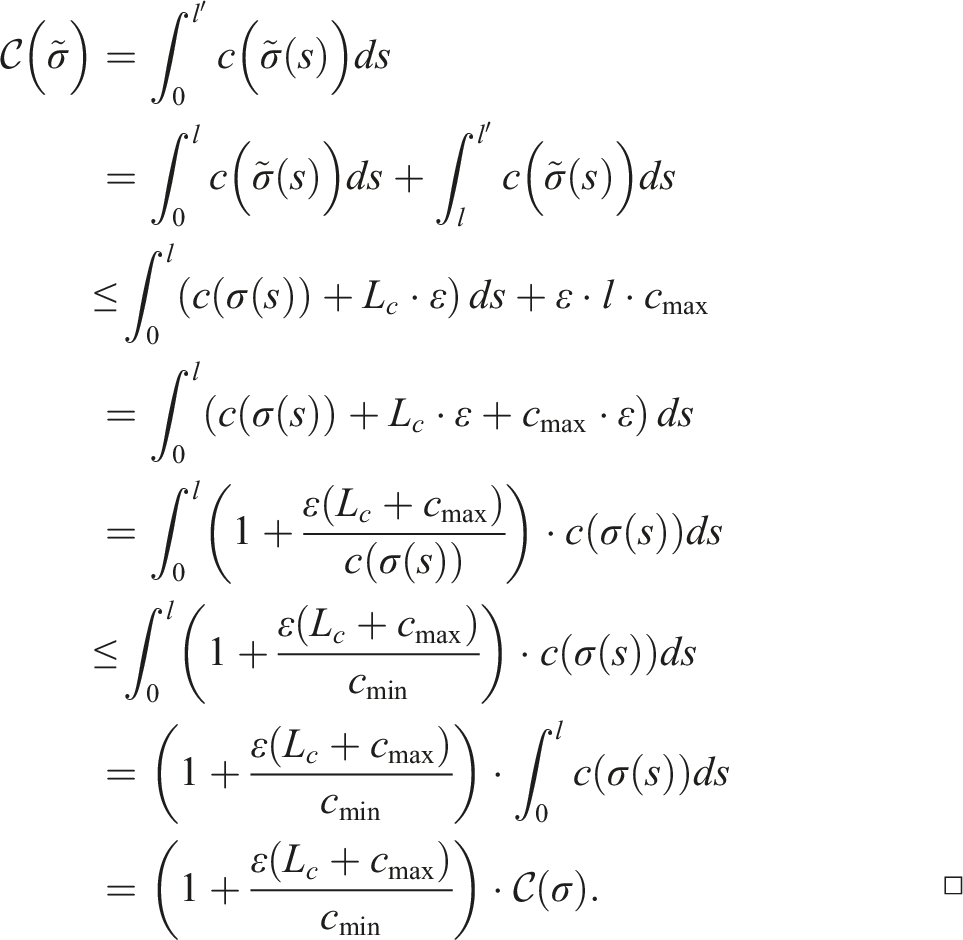
To conclude, if every piece of the sub-trajectory is bounded, the sum of costs of all pieces is then also bounded. Thus, if a trajectory
5.4. Proof of Thm. 1 and Thm. 2
We are in a position to complete the proof of Thm. 1 and Thm. 2. Since the proof for Thm. 2 follows a similar idea as the proof for Thm. 1, we first prove Thm. 1 and then add the essential part that is unique to Thm. 2.
To prove Thm. 1, we first consider a simplified version of
5.4.1. Resolution completeness of RCS_D
We show that Thm. 1 holds for
Let σ be a valid solution to problem Δ that is decomposable and γ-robust. Following Thm. 3, there exists a fine resolution R(σ, ɛ) = (r
ℓ
, r
θ
) and a finite sequence of motion primitives MR(σ,ɛ) ⊆ Mfs(R(σ, ɛ), {0, κmax}) such that σ(0) ⊕ MR(σ,ɛ) is a piece-wise strict ɛ-approximation of σ. In our algorithm, the resolutions are divided by half as the length level l
ℓ
and angle level l
θ
increase. Thus, there exists a fine-enough resolution
The search tree built with
Next, we take ɛ = γ/2 and show that σ
ɛ
is collision-free and satisfies the desired goal tolerance, which implies that
5.4.2. Accounting for pruning in RCS
Since
Since
If we run
Recall that (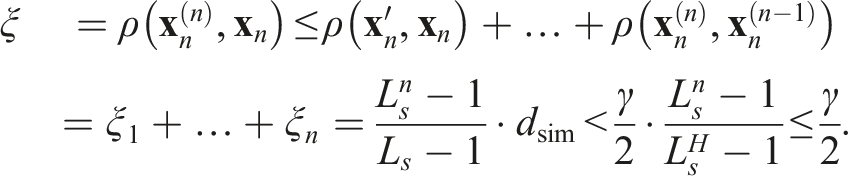
This implies that even in the worst case where all possible replacements happen, the final configuration A 2D illustration of configuration pruning. σ
ɛ
is shown as black nodes, the plan after 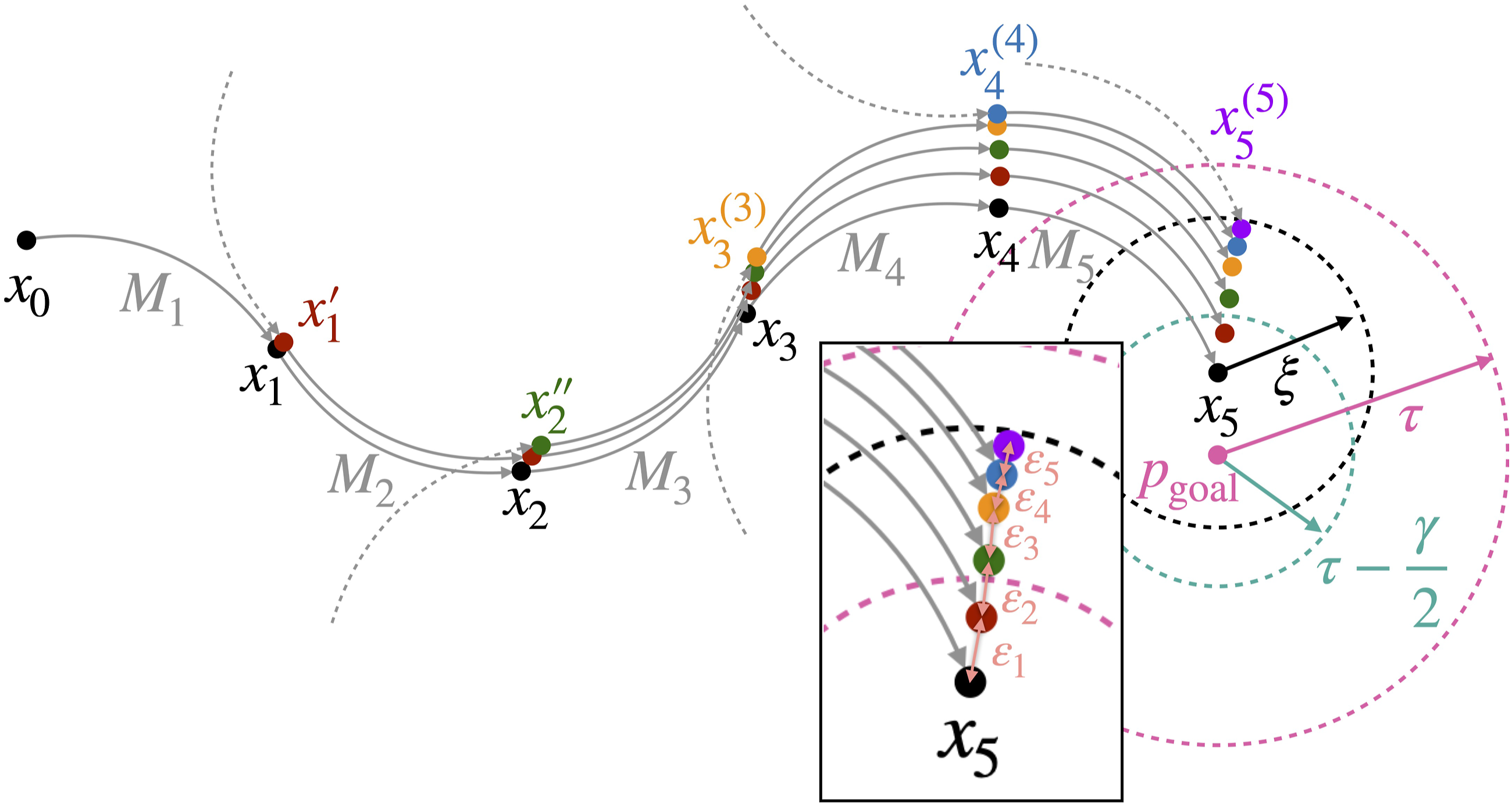
Additionally, we prove that when pruning happens for
To summarize, as long as the required conditions are satisfied,
5.4.3. Resolution optimality of RCS*_D
Similarly to the proof of
First, following the discussion in Section 5.4.1,
Similar to the discussion in Section 5.4.1,
5.4.4. Accounting for pruning in RCS*
The proof for this theorem follows the same idea as Section 5.4.2, so we only focus on cost approximation. Since the optimal trajectory σ* is curvature bounded, there exists some fine resolution R(σ*, ɛ) that can be explored by
Similar to Section 5.4.2, we denote the sequence of motion primitives that composes
We now consider the cost of 
It remains to bound the expression 
It remains to determine the value of ɛ to achieve a desired approximation factor of 1 + ɛcost. So far we required ɛ ≤ γ/2. To further guarantee that
To summarize, as long as the required conditions are satisfied,
6. Experiments
We evaluate our new motion planners for steerable needles using scenarios based on the medical tasks of lung biopsy and liver biopsy: (i) (ii)
The CT scans used in both experiments are from The Cancer Imaging Archive (TCIA) (Clark et al., 2013), a public medical image repository for cancer studies. The chest CT scan for lung biopsy scenario is from the Lung Image Database Consortium and Image Database Resource Initiative (LIDC-IDRI) image collection (Armato et al., 2011, 2015), while the abdomen CT scan for liver biopsy scenario is from the CT volumes with multiple organ segmentations (CT-ORG) dataset (Rister et al., 2019) We illustrate in Figure 1 (top) volumetric models of the relevant anatomy segmented from a CT scan. For the lung segmentation, we follow the method described in Fu et al. (2018). For the liver segmentation, we use the segmentation labels from the CT-ORG dataset for the liver region. The major blood vessels are also segmented using the method described in Fu et al. (2018).
6.1. Test case generation
To create test cases for planning, we randomly sample 50 collision-free start configurations for each scenario, and for each start configuration, we sample 10 collision-free goal points uniformly inside the kinematically forward-reachable workspace of the needle. Since we consider two different values for κmax (see Section 6.2), for each start configuration, two different sets of goal points are sampled. This is because with a larger κmax, the kinematically forward-reachable workspace would also be larger. Thus, each scenario has 1000 test cases in total, including 500 cases for each needle design.
More specifically, in the lung biopsy scenario, start configurations are sampled along the bronchial tube walls (i.e., points reachable by the bronchoscope from which the steerable needle can be deployed), and the goal points are sampled in the lung parenchyma (i.e., points in the tissue of the lung outside the bronchial tubes in which nodules requiring biopsy may occur). In the liver biopsy scenario, start configurations are sampled near the anterior surface of the liver (i.e., points where the liver is close to the abdomen skin from which the steerable needle can be deployed), and the goal points are sampled in the liver tissue (i.e., points in the tissue of the liver in which nodules requiring biopsy may occur). See Figure 12 for the scenarios and representative plans computed by Visualization of the anatomical environments and 10 representative plans for each scenario computed by 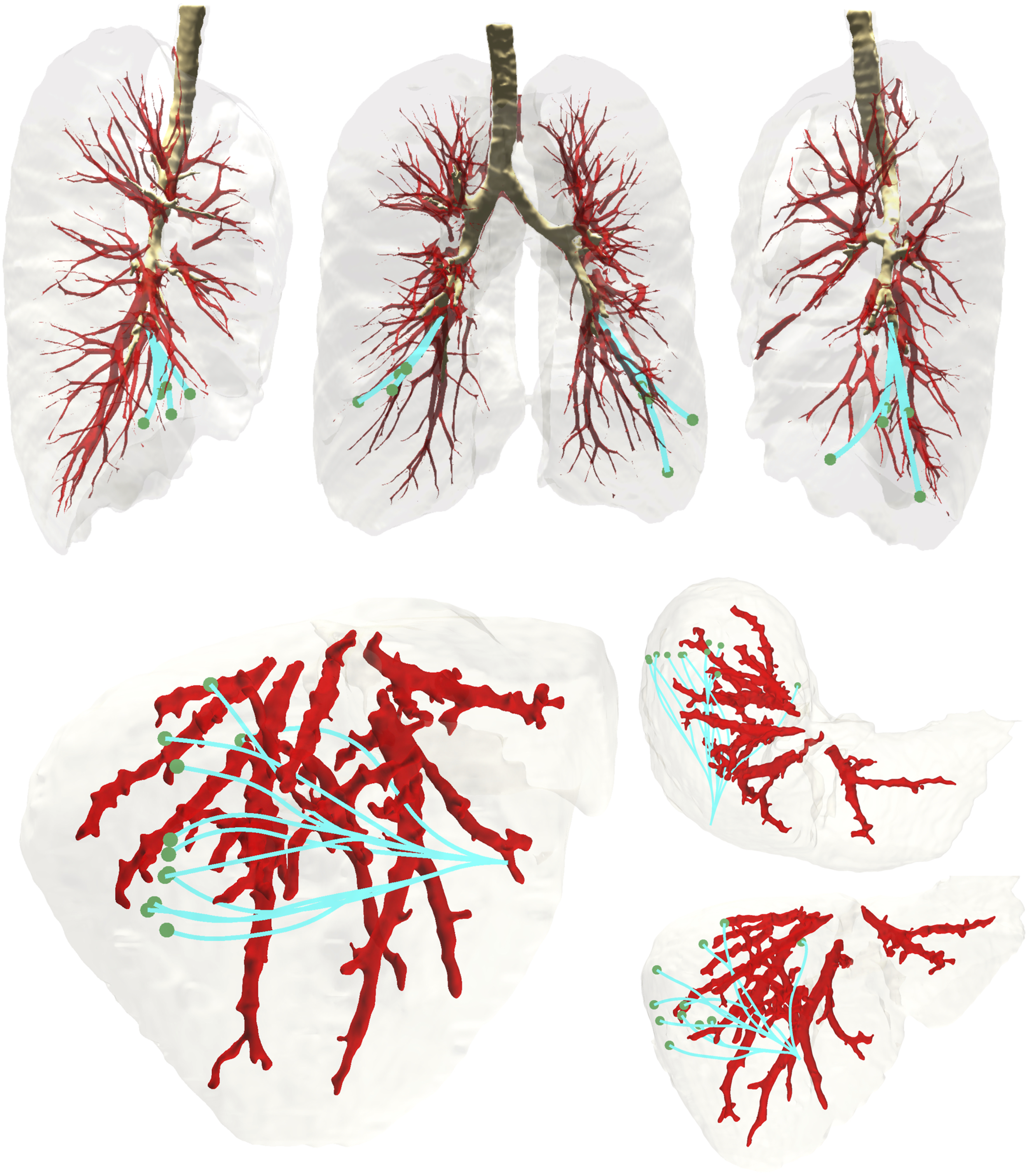
To avoid skewing the data with trivial test cases, we discarded test cases where the start configuration can be connected directly to the goal point with a collision-free arc. Additionally, we use inevitable collision check (mentioned in Section 4.3) to disallow cases where the start configuration has an inevitable collision deeming the problem unsolvable. Finally, note that it is not guaranteed that a valid plan exists for a test case.
6.2. Setups
We consider a steerable needle with two different maximum curvatures κmax = (100 mm)−1 and (50 mm)−1, both with a device diameter of 2 mm and maximum insertion length of 80 mm. The simulated workspace was reconstructed from preoperative CT scans where
We compare in simulation (i) (ii) (iii)
For our proposed planners
We also ran a search-based planner denoted as
All experiments were run on a dual 2.1 GHz 16-core Intel Xeon Silver 4216 CPU and 100 GB of RAM. All parallelizations were implemented with Motion Planning Templates (MPT) (Ichnowski and Alterovitz, 2019). All parallelized versions (including
6.3. Success rate comparison
We now present results pertaining to the success rate of the different algorithms. In our setting, the success rate is the ratio of solved cases among the set of 500 test cases. All planners other than
The results are shown in Figure 13. First, among Success rate as a function of computation time. All plots use logarithmic time axes.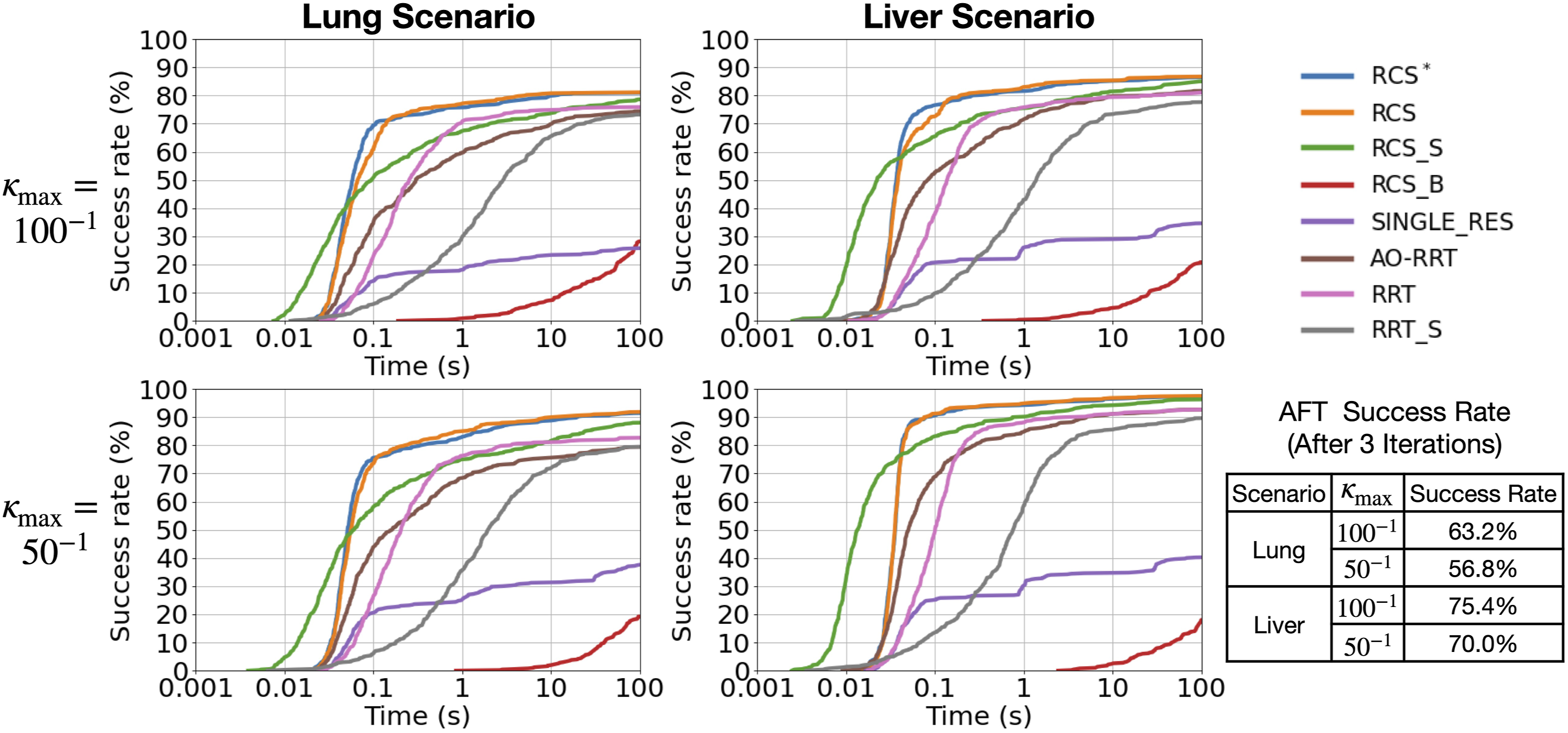
6.4. Plan quality comparison
We continue to compare plan qualities, considering three different well-behaved cost functions: (i) (ii) (iii)
For the lung biopsy scenario, we considered the cost functions of trajectory length and cost map (i.e., costs (i) and (ii), above). In contrast, for the liver biopsy scenario, we considered the cost functions of trajectory length and obstacle clearance (i.e., costs (i) and (iii), above). This is because the method for constructing a cost map in Fu et al. (2018) was designed specifically for the lung anatomy where plenty of small blood vessels exist. For liver anatomy, the cost map constructed using the same method is far less informative.
For this set of experiments, we only evaluated
For all cost functions, the cost of a plan may vary significantly between test cases. For example, trajectory length is affected by how far away the target lies relative to the start pose and cost map values are much higher when the needle is steering in a vessel-cluttered region. Instead of averaging across different test cases directly, for each test case, we compute the relative cost using the
The results are shown in Figure 14. We start our analysis by considering the trajectory length. For all four corresponding plots (for both the lung and liver and for both needle curvatures), the relative costs mostly lie between a factor of 1.01× and 1.04× the cost obtained via Plan quality comparisons. Without specification, a plot shows the relative cost (vertical axis) as a function of computation time (horizontal axis), where the time axis is logarithmic, solid lines show the average relative cost when compared to 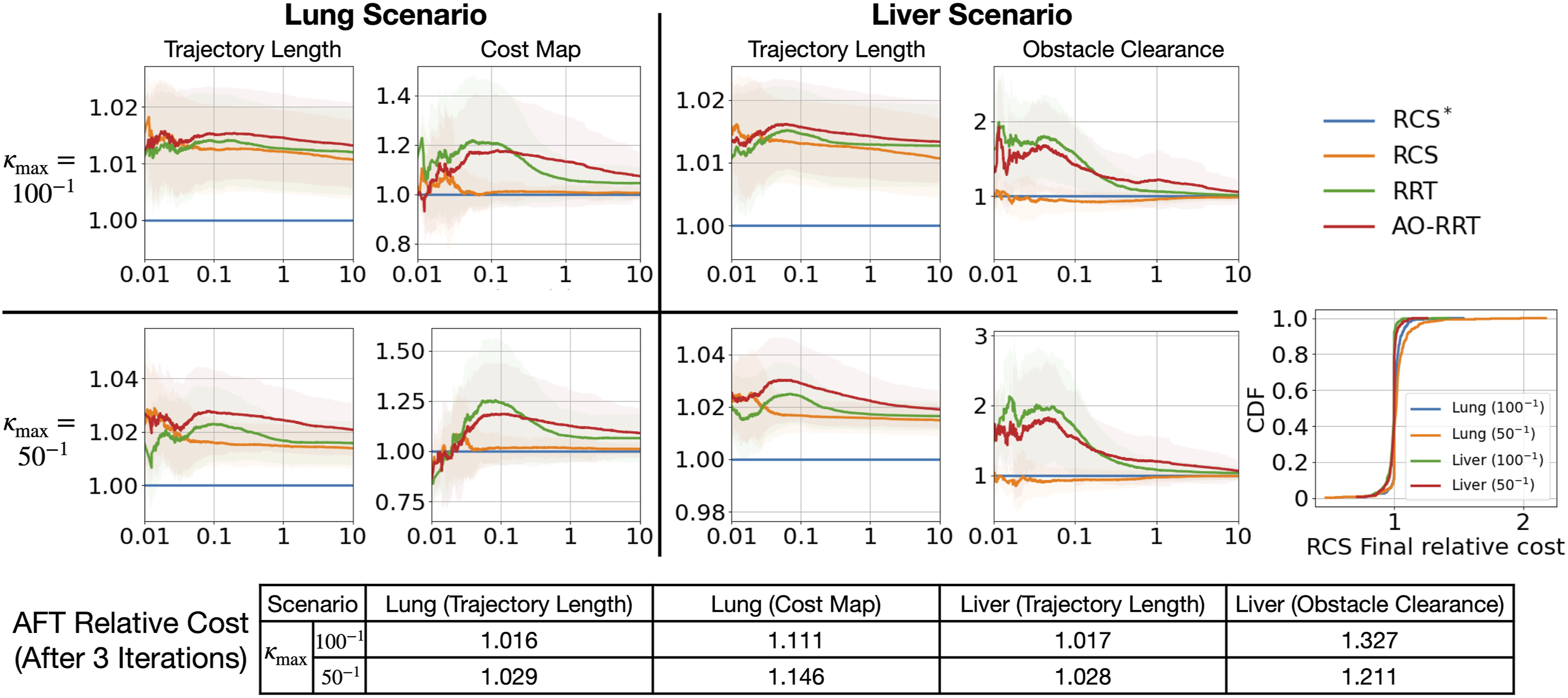
We continue our analysis by considering the cost map (representing tissue damage) evaluated in the lung scenario. Here,
We finish this part of the analysis by considering the obstacle clearance, evaluated on the liver scenario. Here,
We notice that
Finally, we also report the final relative cost for
6.5. Heuristic balancing in RCS and RCS*
In this section, we depict how our algorithms are affected by different parameter choices. We start by evaluating how our definition of rank (equation (4)) affects the behavior of
6.5.1. Evaluating the effect of rank on RCS
Recall that the rank of a node (equation (4)) allows
To depict this tradeoff, we consider the cost map metric for lung biopsy and evaluate 
Results, depicted in Figure 15, demonstrate that if resolution refinement is not penalized (a = 0), all resolutions are treated equally without prioritizing the coarse resolution, and both the success rate and plan quality are negatively affected. This suggests that using multiple resolutions is important and we should prioritize coarse resolutions. Comparing the performance of 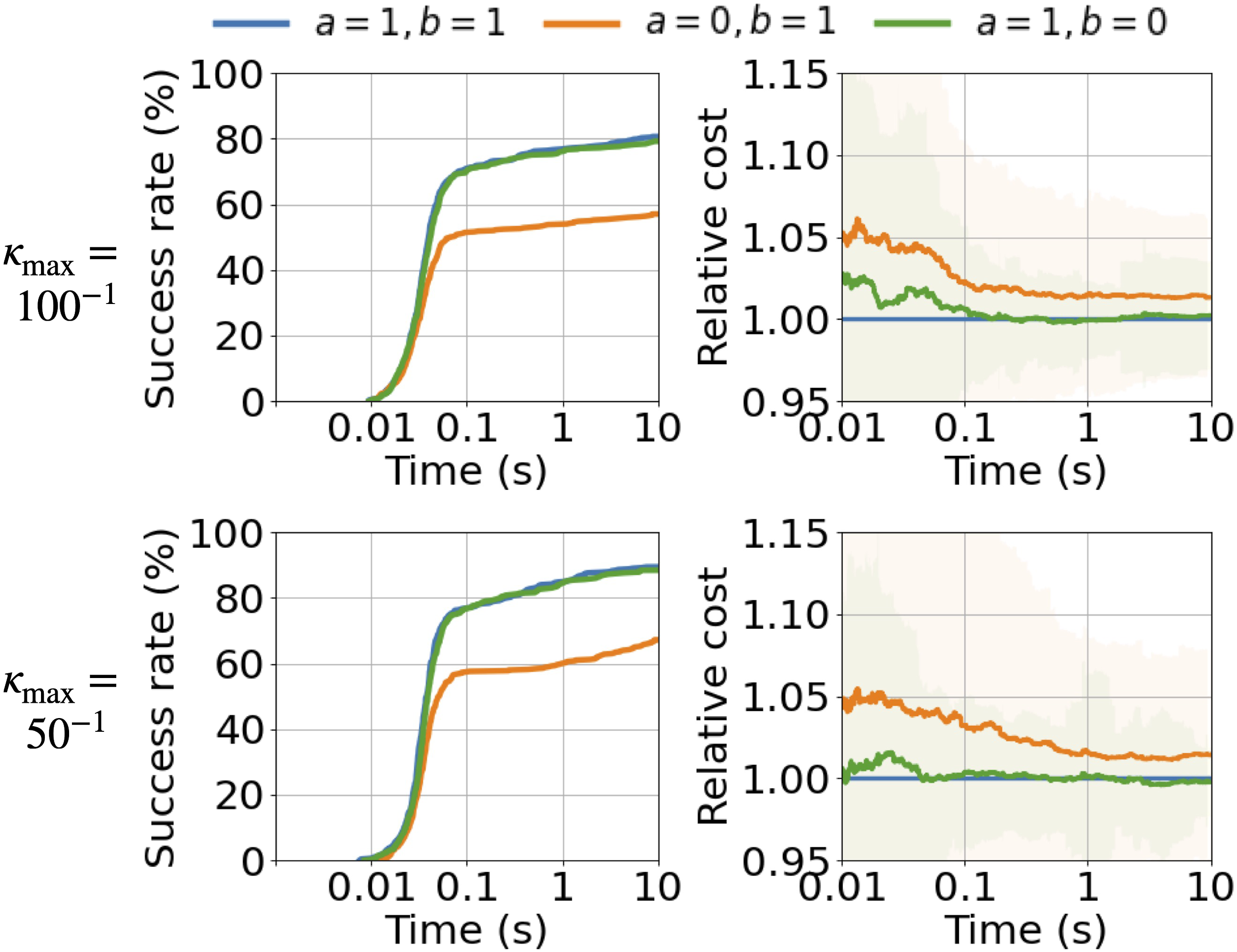
6.5.2. Evaluating the effect of the lookahead on RCS*
Recall that in
To depict this tradeoff, we consider again the cost map metric for lung biopsy and evaluate Comparing the performance of 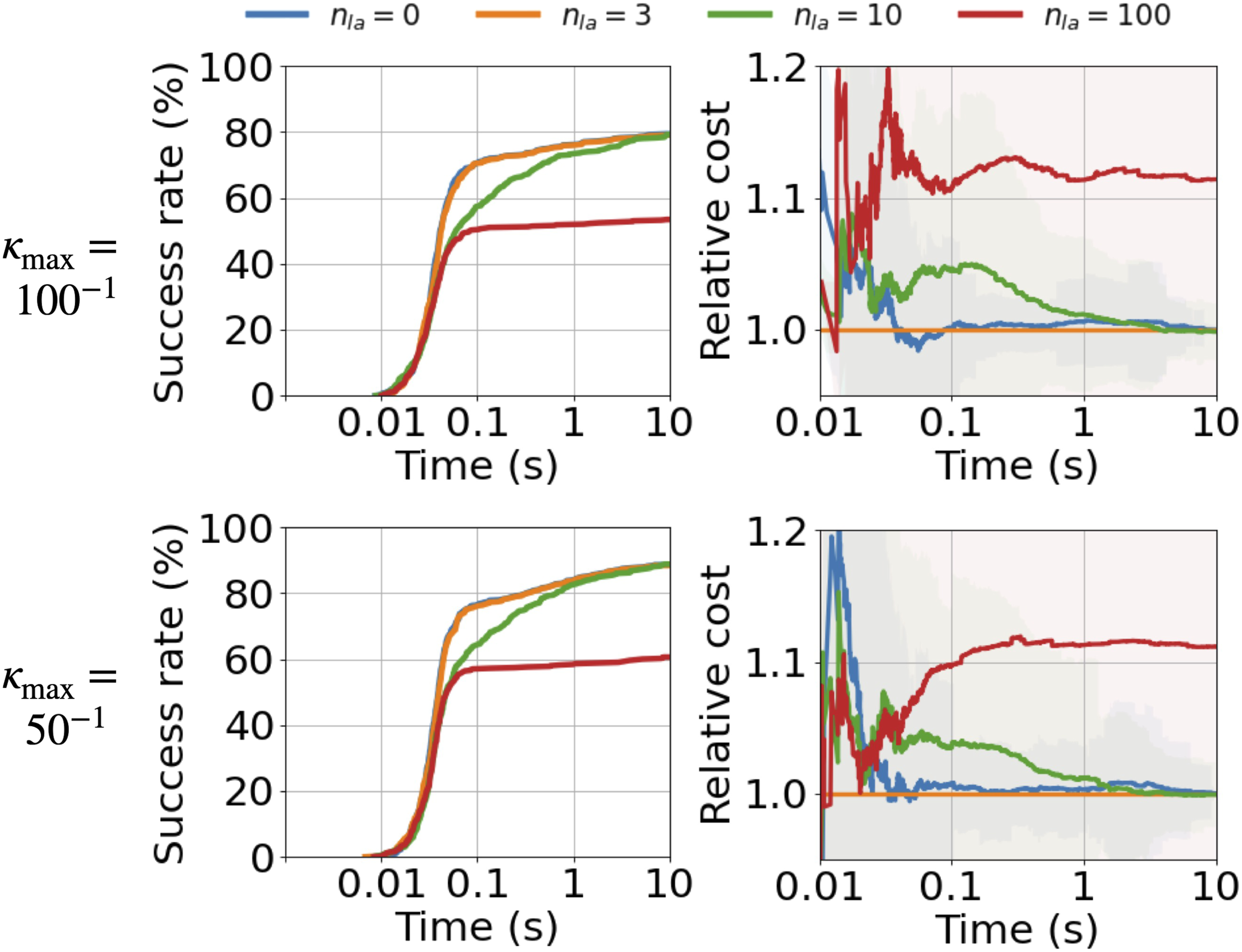
When it comes to plan quality, we see that
To summarize, this experiment shows, from another perspective, that the multi-resolution framework is important both for efficiency and as a general heuristic without considering a specific cost function. As a general guideline, we need to keep nla not too large to retain the benefits of prioritizing coarse resolutions. In our settings, we choose nla = 3 which proved to adequately balance the success rate and the ability to improve the overall plan quality.
7. Conclusion
In this paper, we took an important step toward creating a certifiable optimal motion planner for steerable needles. Specifically, we introduced a resolution complete motion planner for steerable needles,
We view this work as an algorithmic foundation required to obtain certifiable optimal motion planning for steerable needles. Our planner is the first planner for steerable needles that guarantees resolution completeness and resolution optimality, but more work remains. (i) Our analysis showed that, under some mild assumptions, when a qualified solution exists, if the cutoff resolution is fine enough and the plan is robust to some degree (i.e., has some clearance from the obstacles and the goal region boundary), the algorithms will find it. However, it would be valuable for medical applications to provide the precise relation between the system’s controls and this cutoff resolution. Subsequently, we need to provide the precise relation between this cutoff resolution (i.e., what does it mean to be “fine enough”) and the clearance of plans (i.e., what should “some clearance” be?). In the ideal case, when a desired clearance is given (e.g., say we do not consider plans that get overly close to obstacles as a reference plan to approximate), we should be able to provide a cutoff resolution, in an explicit form, that guarantees resolution completeness and resolution optimality. Future work will use this foundation to compute the relation between the aforementioned parameters in order to give physicians certifiable software for motion planning for steerable needles. (ii) Although our proposed steerable needle planners showed good efficiency in experiments, the worst-case computation time can be long. We will also investigate techniques to further speed up the planners (e.g., GPU acceleration or additional optimizations for effective early pruning). (iii) We have started experimentally evaluating the planner with steerable needles in ex-vivo animal tissues. We also will explore how these certifiable guarantees can help gain the trust of physicians for autonomous medical robots.
Footnotes
Declaration of conflicting interests
The author(s) declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: RA is an inventor on university-owned patents on medical robotic devices incorporating steerable instruments that have been licensed to industry.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported in part by the United States National Institutes of Health (NIH) [grant number R01EB024864]; the United States National Science Foundation (NSF) [grant numbers 2008475, 2038855]; the Israeli Ministry of Science, Technology and Space (MOST) [grant numbers 3-16079, 3-17385]; the United States-Israel Binational Science Foundation (BSF) [grant number 2019703]; and the Ravitz Foundation.