
Abstract
This paper presents a method to design a Model Predictive Control to maximize the passengers’ comfort in assisted and self-driving vehicles by achieving lateral and longitudinal dynamic. The weighting parameters of the MPC are tuned off-line using a Genetic Algorithm to simultaneously maximize the control performance in the tracking of speed profile, lateral deviation and relative yaw angle and to optimize the comfort perceived by the passengers. To this end, two comfort evaluation indexes extracted by ISO 2631 are used to evaluate the amount of vibration transmitted to the passengers and the probability to experience motion sickness. The effectiveness of the method is demonstrated using simulated experiments conducted on a subcompact crossover vehicle. The control tracking performance produces errors lower than 0.1 m for lateral deviation, 0.5° for relative yaw angle and 1.5 km/h for the vehicle speed. The comfort maximization results in a low percentage of people who may experience nausea (below 5%) and in a low value of equivalent acceleration perceived by the passenger (below 0.315
Introduction
A primary current focus in the automotive industry is the development of advanced solutions exploiting electronic and electromechanical devices for sensing, actuation and control tasks, intending to improve performance, safety and sustainability. 1
Many of these techniques, known as Advanced Driver Assistance Systems (ADAS), are designed to help the driver controlling the vehicle and are entitled to intervene in case of dangerous maneuvers, driver distraction and high-risk situations. These systems warn, signal and, in some cases, may intervene to mitigate the effect of potential distraction errors of drivers, which are the cause of
Although extensive, the literature related to control strategies for performance and safety improvement for assisted and automated vehicle does not address exhaustively the optimization of the passengers’ comfort. Some works make a retrospective evaluation, like in Ren et al. 19 where different control strategies are analyzed and their effectiveness is assessed through three indexes, one of them is the ride comfort index. Although comfort criteria (such as the ones based on ISO 2631 or on the maximum allowable jerk and acceleration) are well known in common practice, 20 to the best of the authors’ knowledge, a few control design techniques focusing on comfort optimization are present in the literature. A cascade steering control strategy for autonomous ground vehicles to prevent the velocity from exceeding a specific comfort region is presented in Whitsitt and Sprinkle 21 where a preliminary collection of data is necessary to define the comfort region appropriately. An alternative approach is presented in Mohseni et al., 22 where an optimal control problem is defined to reduce fuel consumptions and improve the passenger comfort, by minimizing accelerations and jerk. Although the formulation is encouraging, the application of this method is limited to cooperative in standard traffic scenarios. The adoption of weighted root mean square acceleration (WRMSA) as a comfort index, is proposed in Du et al. 23 and Eriksson and Svensson. 24 Different velocity control strategies are presented in Du et al. 23 Each strategy is designed to guarantee the comfort in a particular driving phase, and it should be selected on the basis of the driving condition, limiting the generality of the method. On the other hand, a lateral path planner is hand-tuned using the WRMSA index in Eriksson and Svensson. 24
The objective of this paper is to propose a method for the design of a control strategy that optimizes the comfort perceived by the passengers and is effective in the tracking control performance. The method is conceived to be applied in assisted and autonomous vehicles and exploits an MPC-based architecture. The proposal is different from previous literature works because it aims to be effective in a wide range of driving conditions, it includes both lateral and longitudinal dynamics, it proposes an off-line method for the weighting parameters of the MPC that has never been presented in previous works. The control is designed for a subcompact crossover SUV. The model embedded in the MPC is a two degrees of freedom (DOF). The cost function of the MPC is designed to guarantee stability of the vehicle, the tracking of the speed profile and minimization of the acceleration along the three axes transmitted to the passengers. This function exploits three coefficients to weight the speed tracking error, lateral deviation and relative yaw angle. These weights are designed offline by means of a Genetic Algorithm (GA) that selects the optimal parameters by minimizing a fitness function that is expressed as the inverse of an equivalent acceleration coefficient, provided by the standard ISO 2631 (“Mechanical vibration and shock – Evaluation of human exposure to whole-body vibration”). 25
The method is tested with simulation experiments conducted in Matlab/Simulink environment using a 14 DOFs vehicle model. The tests are performed using a highway and extra-urban scenarios considering the legal speed limits. The performance of the proposed method is evaluated considering the requirements of the ISO 2631 in terms of equivalent acceleration coefficient and Motion Sickness Dose Value (MSDV). A sensitivity analysis is performed to study the behavior of the control when varying the load of the vehicle, front and rear cornering stiffness and load distribution. Further validation of the effectiveness of the approach is conducted comparing the presented MPC based method with a decoupled control strategy exploiting the combination of an MPC and a PID for the lateral and longitudinal control, respectively. The controller parameters of this second approach have been designed using the same genetic algorithm approach to guarantee the same design methodology as for the proposed MPC method. The obtained results demonstrate the validity of the approach, which resulted in a “not uncomfortable” evaluation according to the ISO equivalent acceleration and a probability of experiencing nausea and sickness lower than 3.5%.
The novel contributions of this paper are: (a) the design of a vehicle dynamic control that maximizes the comfort perceived by the passengers by respecting the tracking control requirements along lateral and longitudinal directions; (b) a method for the off-line tuning of the MPC weighting parameters by means of a Genetic algorithm whose cost function is based on comfort index evaluation extracted from ISO 2631.
The paper presents the method in Section 2 where vehicle modeling, definition of the comfort evaluation indexes, control design and MPC weighting parameter selection are discussed. The results are presented in Section 3 in the following three analyzes: (a) control tracking and comfort performance evaluation, (b) comparison with a decoupled MPC and PID control strategy, and (c) control robustness analysis when varying vehicle parameters.
Method
The layout of the proposed method is illustrated in Figure 1. The environment perception task receives as input the data from the sensors installed on the vehicle namely cameras, lidars, GPS. The fusion of this data provides information about the environment surrounding the vehicle. Specifically, the lane boundaries, the presence of obstacles and traffic signs are detected. Owing to this information and the real time measurements of the vehicle states, a reference trajectory and a speed profile are computed.

Layout of the proposed method.
In this work, the reference trajectory corresponds to the center line of the lane and it is computed as the average between the right boundary of the lane and the left one. The reference speed profile to follow the generated trajectory is based on two different criteria. The first one is related to the geometry of the road while the second one limits the lateral acceleration. Thus, the vehicle’s reference velocity is imposed equal to the minimum value between the maximum velocity imposed by the road geometry and the velocity computed limiting the lateral acceleration. Afterwards, MPC provides the wheel steering angle and the acceleration/deceleration command to ensure the automated vehicle guidance along the generated trajectory. The controller parameters (
Vehicle modeling
In this section, the vehicle model embedded in the MPC and the verification model used for the validation of the method are illustrated.
Reference model for MPC
The reference model for MPC is based on a bicycle representation of the vehicle.
26
Referring to Figure 2,
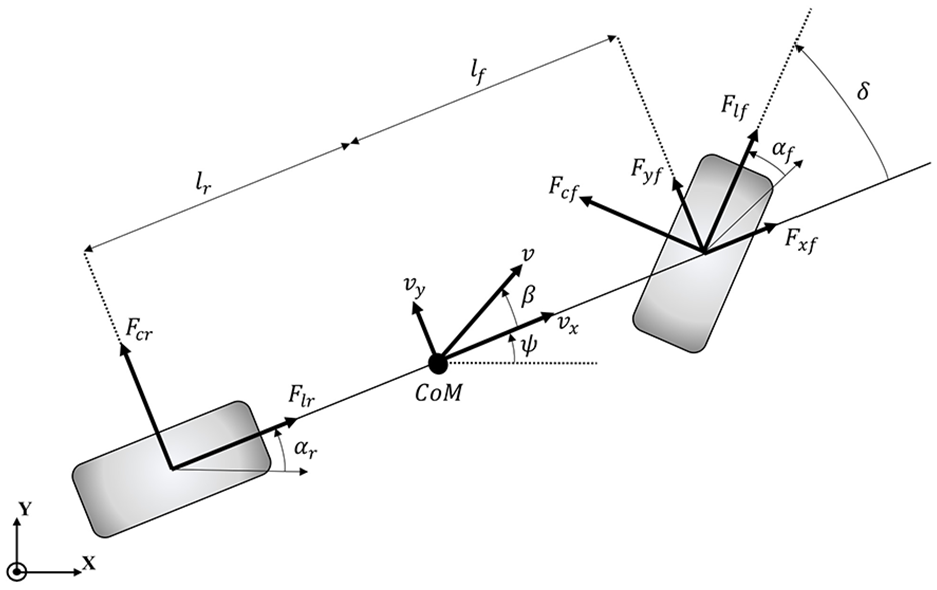
Bicycle vehicle model.
When lateral dynamic is considered, the equations of motion are computed applying the second Euler equation along


where


where


In the MPC formulation, a linearized vehicle model is considered. If the assumption of small angles is verified, the following approximation is valid


To define explicitly the controlled variable, the equations (1) and (2) are organized in terms of errors with respect to the road, lateral deviation, and relative yaw angle. As shown in Figure 3, the lateral deviation


where


Vehicle model in terms of lateral deviation
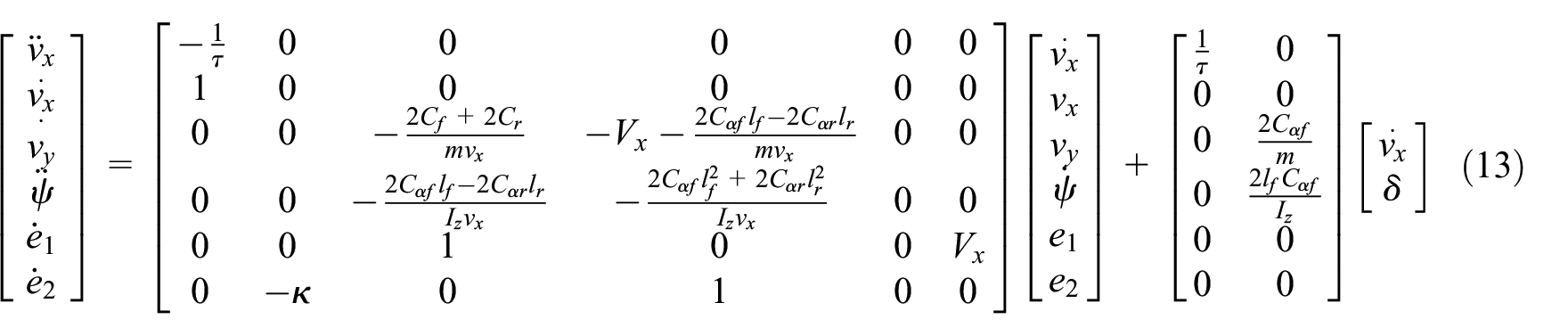
The longitudinal dynamics is implemented through a first order transfer function that incorporates a lag in tracking desired acceleration. 26

The resulting state space representation of the model embedded in the MPC is
The main parameters of the subcompact crossover SUV considered in this study are reported in Table 1.
Main parameters of the considered vehicle.

Verification model
The verification model consists of a 14 DOFs vehicle model implemented in Simulink. A six degrees of freedom rigid two-axle vehicle body is used to represent the longitudinal, lateral, vertical, pitch, roll and yaw motions. The model considers body mass, inertia, weight distribution between the axles due to suspension and suspension forces and moments. A two degrees of freedom wheel model is applied. It implements the vertical and lateral behavior of a wheel adopting the Pacejka Magic Formula. To simplify the analysis, lumped unsprung and sprung masses are used, the steer angle of the left and right wheels is assumed to be the same and the tires are assumed to be always in contact with the ground.
26
Figure 4 represents the block scheme of 14 DOFs model. The inputs of the plant are the wheel steering angle (

Block scheme of the 14 DOFs vehicle model.
Definition of comfort evaluation indexes
In the recent past, comfort evaluation was addressed considering mainly ergonomic factors such as seat vibrations and noise. The introduction of assisted and autonomous vehicles suggested to include additional indexes related to natural movements, motion sickness, disturbances and apparent safety in the analysis. 27
Qualitative definitions of comfort and ride quality are provided by ISO 5805, which defines comfort as a “subjective state of well-being or absence of mechanical disturbance in relation to the induced environment (mechanical vibration or repetitive shock),” and ride quality as a “degree to which the whole subjective experience (including the motion environment and associated factors) of a journey is perceived and rated as favourable or unfavourable by passengers or operators.” The comfort is thus influenced by environment physical factors and individual sensitivity to them while the ride quality is a metric describing a person’s subjective perception of a vehicle ride.
On the other hand, a quantitative evaluation of the comfort can be conducted based on ISO 2631 which defines metrics to quantify the whole-body vibration in relation to human health and comfort, probability of vibration perception and incidence of motion sickness.
In this study two indexes extracted from ISO 2631 have been considered. The first one (
The computation of the first index is obtained as indicated in Figure 5.

Procedure to calculate the equivalent acceleration.
A Fast Fourier Transform (FFT) is applied to the longitudinal and lateral accelerations

where

Amplitude response of the weighting function
The equivalent acceleration index is then calculated multiplying the frequency-WRMS acceleration components by squared axis coefficients (

where
The evaluation of the comfort based on the equivalent acceleration index
Likely reactions to various magnitudes of overall vibration total values, specified in ISO 2631-1.

The second index aims to evaluate the probability of the motion sickness occurrence as an effect of the oscillatory motion. As a matter of fact, motion at frequencies lower than

where

where
MPC design
A MPC is adopted to control the lateral and longitudinal dynamics of the vehicle. As illustrated in Figure 1, the architecture of the control strategy is composed of an optimizer, performing the on-line optimization, and an embedded reference vehicle model (equation (13)), used to obtain the optimal actions for the control measures. The inputs to the MPC are: (1) the previewed curvature
Given the control sampling interval

where


Selection of MPC weighting parameters
The achievement of comfort optimization and vehicle control performance relies on the tuning of the weighting parameters of the matrix
On the basis of these specifications, the lower and upper bounds of the weighting parameters have been defined:
The most suitable set of weighting parameters in terms of comfort optimization have been selected among all the possible combinations of

Genetic algorithm working flow.
A GA works on a population composed by a certain number of solutions, called chromosomes. The chromosomes are the transliteration of all the parameters of the solution. Each chromosome is made by genes which can be encoded by binary or floating numbers. After the first population is randomly created, each chromosome is compared to the others in the population and evaluated through a fitness functions that indicates how successful the solution is. Higher is the fitness rating, higher the quality of the solution and the possibility to mate and yield more fitter individuals. The following populations are generated to encode better solutions using genetic operators, also known as evolution operators, namely elitism, crossover, and mutation.
In the present study, a population of 20 individuals in 60 generations is considered. The Arithmetic Crossover Procedure and the Uniform Mutation Method are adopted as genetic operators. The selection of the best individuals is performed using a Normalized Geometric selection since the individuals in the population have very close fitness values. This method assigns a probability to each individual based on the rank of solutions after they are sorted. The stop condition is satisfied when the maximum number of generations is reached. In the proposed solution, each chromosome

where

where
An initial population is randomly generated (20 individuals).
The vehicle simulation is performed, and the acceleration data are collected and post-processed to get
The fitness value is computed for each chromosome.
The best set of chromosomes are selected implementing the Normalized Genetic selection.
The survivor selection based on elitism is applied to do not lose potential fittest solutions in the next generation.
New individuals are generated applying the Arithmetic Crossover procedure.
To introduce and maintain diversity in the population Uniform Mutation Method is applied.
A new population is created according to
The tuning of the parameters has been conducted considering several driving scenarios in the following categories: urban, extra-urban and highway. This design choice allows providing a result that is general with respect to the driving conditions.
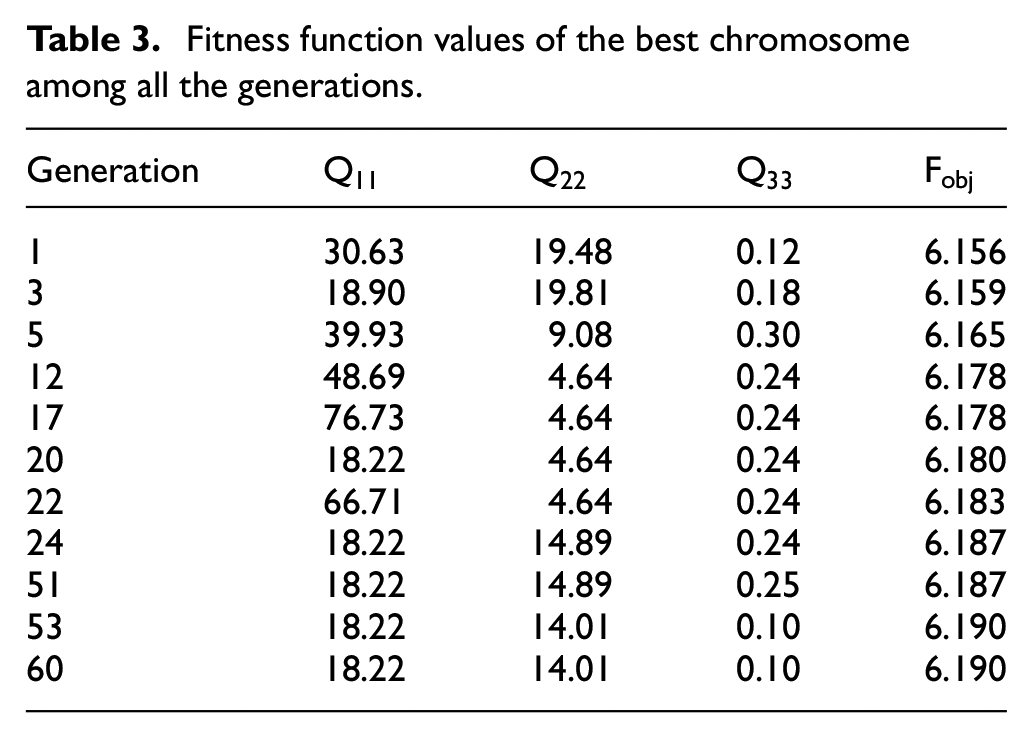
Figure 8 and Table 3 shows the graphical and numerical convergence trends of the best chromosome. The identified parameters are
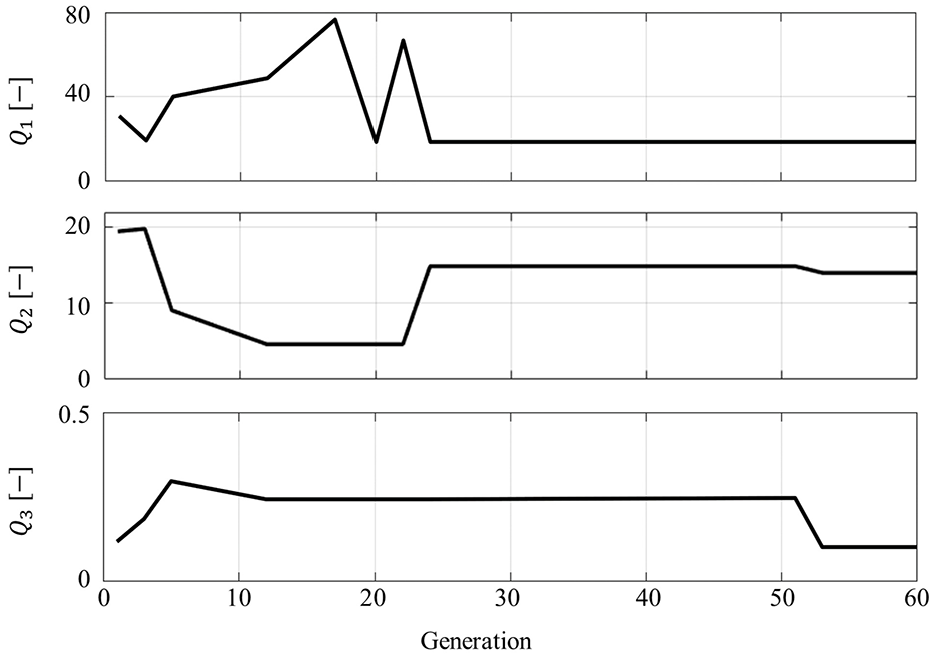
Convergence trends of the best chromosome for the coupled control strategy.
Fitness function values of the best chromosome among all the generations.
Results and discussion
The evaluation of the proposed method effectiveness is conducted in three cases: (a) analysis of control tracking performance and passenger comfort evaluation on a highway and extra-urban scenarios; (b) comparison of the proposed method with an alternative control strategy based on a MPC and PID for the longitudinal and lateral dynamics respectively; and (c) sensitivity analysis of the proposed method when varying the values of mass, cornering stiffness and mass distribution of the vehicle.
MPC performance analysis
The control strategy is tested in a highway and extra-urban scenarios to evaluate the passenger comfort and tracking performance. The road scenarios in
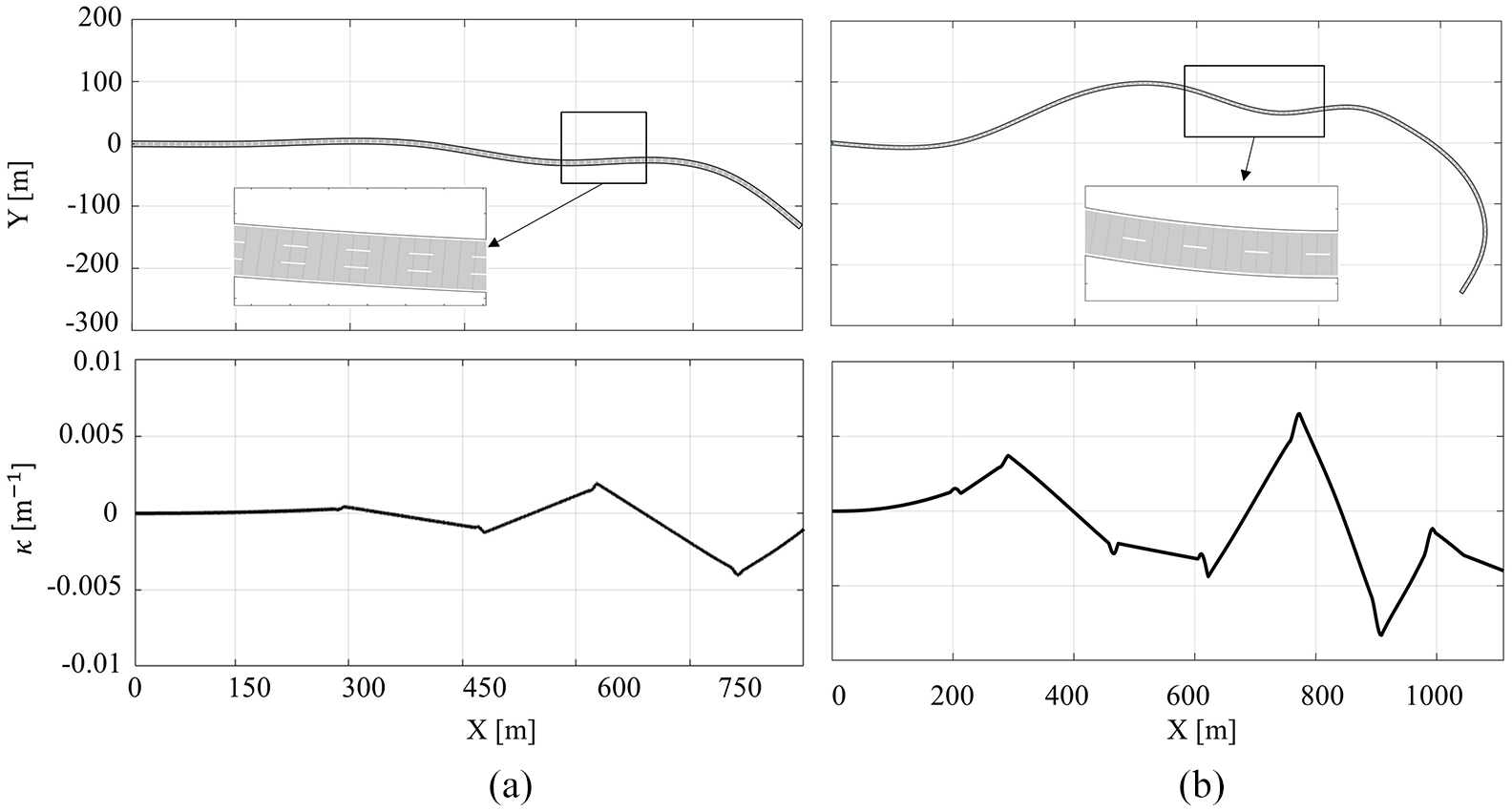
(a) Highway scenario and road curvature
Figure 10 presents the results obtained in the two scenarios: (a) is the highway and (b) is the extra-urban scenario in terms of lateral deviation (subplots a.1 and b.1), comparison between the reference and the actual speed (subplots a.2 and b.2), relative yaw angle (subplots a.3 and b.3), front wheel steering angle (subplots a.5 and b.5), longitudinal acceleration (subplots a.4 and b.4) and lateral acceleration (subplots a.6 and b.6).

Results obtained in the highway scenario: (a) Highway scenario, (b) Extra-urban scenario, (a.1-b.1) Lateral deviation
In both scenarios, the tracking control performance are satisfied. The longitudinal velocity is tracked with an error that is much smaller than
Comparison with a decoupled strategy based on MPC and PID
An additional validation of the effectiveness of the proposed approach is obtained comparing it with a decoupled control strategy based on a MPC and a PID to control the lateral and the longitudinal dynamics respectively. As shown in Figure 11 which replaces the MPC control block in Figure 1, the inputs to the MPC are: the previewed curvature

Scheme of MPC and PID control strategy. The two blocks replace the MPC control block in Figure 1.
Also for this control strategy, a Genetic Algorithm is applied to tune the control parameters on the basis of the comfort index

where
Afterwards, the controller is tested on the scenarios illustrated in Figure 9. The performance of the decoupled control strategy is shown in Figure 12, that is structured as Figure 10. As expected, the comfort performance is nearly equal to the proposed method since only the longitudinal control has been changed. For this reason, the longitudinal dynamic is less relevant with respect to the lateral for the comfort evaluation. However, good comfort evaluation results are obtained at the expense of lower control tracking performance. The lateral deviation, the relative yaw angle and speed tracking are indeed slightly worse than the single MPC case. In particular, the lateral deviation is in the range

Results obtained in the highway scenario: (a) Highway scenario, (b) Extra-urban scenario, (a.1-b.1) Lateral deviation
Sensitivity analysis
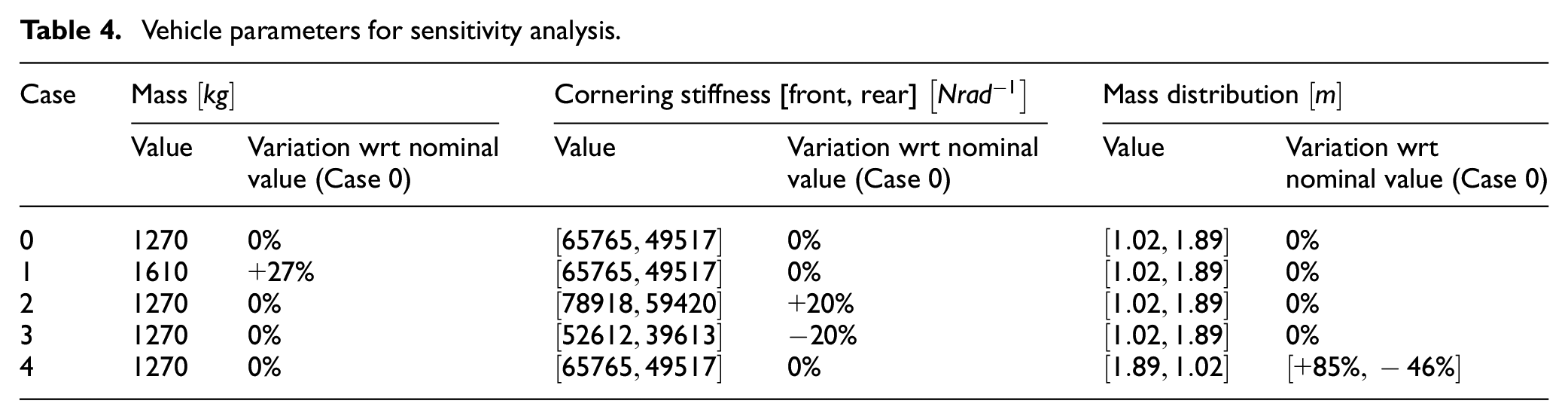
The last analysis is conducted to validate the robustness of the proposed control strategy at variation of four vehicle parameters: mass, front and rear cornering stiffness and mass distribution. The map of the variations of the parameters is illustrated in Table 4. Five different parameter combinations are considered. The setting of the vehicle with the parameters assuming their nominal values is called Case 0. The mass is changed to consider the variation of load, the cornering stiffness is altered to simulate different types of tires and the mass distribution is modified to take into account the variation of the center of mass.
Vehicle parameters for sensitivity analysis.
For the five settings, the simulation has been performed on the extra-urban scenario and the mean and peak values of the longitudinal speed error, lateral deviation, relative yaw angle, wheel steering angle, longitudinal and lateral acceleration have been recorded and are reported in Table 5.
Mean and peaks values of velocity error, lateral deviation, relative yaw angle, wheel steering angle, longitudinal and lateral acceleration for each case of variation.

This analysis highlights that the control is robust at the variation of the above mentioned four parameters. As it is evident from the table, the main difference is recorded at varying the mass distribution. The velocity mean error increases up to
Conclusion
In this paper, an MPC designed to optimize the tracking of speed profile, lateral deviation and relative yaw angle and maximize the passenger comfort has been proposed. The passenger comfort was maximized through an appropriate choice of the weighting parameters of the controller. The parameters have been selected by means of an optimization conducted with a Genetic Algorithm.
The method has been validated successfully in two different scenarios. The control strategy pointed out a good performance for both the lateral and longitudinal guidance. The speed profile was accurately followed while the lateral deviation is always within
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.