
Abstract
4SPRR-SPR parallel robot is a novel closed-loop mechanism. The research of kinematics is the basis of real-time and robust robot control. This paper aims to proposing a method to address a surrogate model of forward kinematics for PMs (Parallel Mechanisms). Herein, the forward kinematics model is derived by training the VQTAM (Vector-Quantified Temporal Associative Memory) network, which originates from a SOM (Self-Organized Mapping). During the processes of training, testing and estimating this neural network, the priority K-means tree search algorithm is utilized, thus improving the training efficacy. Furthermore, LLR (Local Linear Regression), LWR (Local Weighted Linear Regression) and LLE (Local Linear Embedding) algorithms are respectively combined with VQTAM to get three improvement algorithms, aiming to further optimize the prediction accuracy of the networks. To speed up solving the least squared equation in the three algorithms, SVD (Singular Value Decomposition) is introduced. Finally, Data from inverse kinematics by geometric method is obtained, which is for constructing and validating the VQTAM neural network. Results show that the prediction effect of LLE algorithm is better than others, which could be a potential surrogate model to estimate the output of forward kinematics.
Keywords
Introduction
Parallel robots offer noticeable advantages in machining applications, especially in the field of heavy equipment manufacture, due to their high rigid-weight ratio and load capacity. Recently, the machine tool industry has discovered the potential advantages of PMs and many parallel machine tools have been developed based on either the 6-DOF (degrees-of-freedom) parallel mechanisms or 5-DOF PMs. 1
Parallel robots or PMs with 5 or 6 DOF are often used as motion simulators and crane devices. Stewart introduced a 6-DOF PM, which is now popularly known as Stewart platform. 2 It is commonly used in flight or driving simulators, vibration isolation platform, space docking mechanisms, and space telescope.3,4 Hereafter the lower-mobility (2-5 DOFs) PMs have emerged and have become popular owing to their simple structure, low kinematic coupling, low cost and convenient control.5–7 Xie et al., 5 Huang et al. 6 and Joshi et al. 7 studied the type synthesis for different types of lower-mobility PM. Therefore the 2UPR/SPR PM 8 and 3UPS/UP PM9,10 have been used as position adjusters and space telescope (R, P, U and S stand for revolute, prismatic, universal and spherical joints respectively). As far as 5-DOF PMs are concerned, researchers have mainly worked on the type synthesis.6,11–15 Through the type synthesis, a variety of PMs are obtained.16,17 For instance, M. Garcia-Murillo et al. 18 proposed a 2(3-RRPS) parallel robot and analyzed its workspace. Nicholas Baron, et al. 19 displayed a family of kinematically redundant planar parallel robots, and presented a geometric method of singularity avoidance. In addition, the cable-driven manipulators are a class of PMs, where the end-effector is displaced by means of servo-actuated extendable cables. 20 They have high ratio of payload to robot weight and a much larger workspace which is appropriate for camera positioning in sports stadiums and many others. 21 Arian Bahrami et al. studied the optimal design of various forms of the cable-driven manipulators.22,23 In summary, the structures of PMs are various and have been applied to many fields. However, there is still no executable method to solve the kinematics, especially the forward kinematics.
The 5SPRR PM is a 6-DOF PM, which has been used as a machining tool.24–26 The structural form of 4SPRR-SPR parallel robot, which has great potential to transform into a new type of mobile machining robot, is derived from the 5SPRR PM. To the best knowledge of the author, up to now, Research, such as its kinematic, workspace analysis et al. has not been conducted yet.
Parallel manipulators do not have formulaic kinematic solutions. Therefore, several studies are focused on methods to simplify the solution of robot kinematics. Intelligent algorithm or machine learning is introduced into kinematics solution of robot. Simpler mapping models of kinematic input and output are established to replace the complex analytical solution. Evolutionary computational methods such as genetic algorithm (GA),27–31 differential evolution (DE), and particle swarm optimization (PSO) 32 are used to optimize the solutions by formulating the problem in the form of an objective or a fitness function. Furthermore, approximation methods based on artificial neural networks and polynomial regression models33–37 can also be used to estimate forward kinematic. Robot kinematics can be regarded as a non-linear autoregressive model with exogenous input (NARX). In reference, 38 the forward kinematics of parallel manipulators is solved by combining the wavelet network and the NARX method. However, the validity of this method is still dependent on parameter initialization and back propagation learning process. The simplification of complex kinematics model often leads to decreasing the accuracy. To overcome this problem, efficient and accurate kinematics identification is needed. 39
The VQTAM algorithm does not depend on the adjustment of super parameters, but on SOM to achieve topology preservation. It can be applied to the mapping from input space to output space, as an extension of SOM. The mathematical foundation of VQTAM is non-linear manifold embedding. This method is suitable for time series modeling and prediction of non-linear systems. Depending on the self-organizing mapping structure, the discrete mapping relationship can effectively realize output estimation according to exogenous input.39–41 Since the input space and output space of VQTAM are discrete, a network with more neurons is required to achieve high-precision prediction. In order to improve the computational efficiency, it is necessary to reduce the number of VQTAM neurons, which decreases the efficiency. Improved local linear algorithms of VQTAM are proposed to solve the inverse kinematics of a 6-DOF robot efficiently and accurately.
In this paper, a novel parallel robot that could be used as mobile machining robot is introduced. The architecture and general kinematic properties of the 4SPRR-SPR parallel robots are outlined, and the study on its kinematic follows.
Research methodology
4SPRR-SPR parallel robot is a novel closed-loop mechanism. Its inverse kinematics can be achieved using a geometric method. The rod length can be obtained quickly through the known pose of end effector. But the forward kinematics of parallel robot is very complex. It’s a non-linear system. Generally, it is difficult to accurately determine the forward kinematics.
Thus, the length of drive limbs corresponding to different poses can be obtained using inverse kinematics conveniently. The data obtained from the inverse kinematics can be used to train the surrogate model of the forward kinematics. In this paper, VQTAM neural network is used to replace the complex calculation of forward kinematics. The research content and structure of this paper are shown in Figure 1.

Research content and structure.
In Section 2, the inverse kinematics is studied. Using the inverse kinematics algorithm, the length of drive limbs corresponding to poses is calculated as the sample set.
In Section 3, the non-linear system identification method based on VQTAM is studied, and the training method of VQTAM neural network is established. In the process of VQTAM training and testing, it is core to search and activate neuron nodes. Therefore, the priority search K-means tree algorithm is introduced for this step.
In Section 4, the improved method of local linearization of input and output mapping based on VQTAM neural network is studied.
Kinematic of robotic manipulator
4SPRR-SPR parallel robots
The 4SPRR-SPR parallel robot is one of the new 5-DOF PMs, and its structure is shown in Figure 2. The four limbs of the PM consist of one spherical joint, one moving pair and two rotating pairs, and the other one lack for a rotating pair at one end of the limb. The rotating pairs connected with an end effector are coaxial. The spherical joints connected with the static platform are not arranged in the same plane but are distributed in different positions in space. This provides more possibilities for the optimization of the parallel mechanism.

The structure of 4SPRR-SPR parallel robot.
The arrangements of the kinematic pairs of the 4SPRR-SPR parallel robot are similar, except that the end of the first limb is fixed to the moving platform. The kinematic pair arrangement of the ith chain is shown in Figure 3 (i = 2,3,…5).

ith limb structure diagram.
Ai is the center point of the universal joint connected by the ith limb and the static platform, Bi and Ci are the two revolving pair centers of the limb, and D is the reference point of the position of the end effector. The screw of the center line
For the ith limb, the coordinate system Oi-xiyizi at Ei is established. Ei is the vertical foot from Ai to DCi. The screws represented in coordinated Oi-xiyizi are

Where bi, ci, mi, and ni represent the length of segment AiBi, BiCi, CiEi, and EiAi respectively.
The six screws of the ith limb are linearly independent (i = 2,3,…5). The screws of the ith limb constitute a 6-system of screws, which provide no constraint to the end effector.
The screw system of the first limb differs from those of others, because the end of the first limb is fixed to the moving platform. The screws represented in coordinated O1-x1y1z1 are

The reciprocal screw of the 5-system screws can be written as

Therefore, five limbs provide one constraint to the end effector. It can be confirmed that 4SPRR-SPR parallel robots have 5 DOFs. The motion screw system which reflects the DOF property of the end-effector can be obtained by finding the secondary inverse screw system of the end-effector.

Formula (4) shows that the end effector can rotate around the X and Y axes and around the line (0,0,1;0,-n1,0), which passes through point A1 and parallels to the Z axis. The end effector can also moving along the X and Z-axes.
Inverse kinematics of 4SPRR-SPR parallel robot
The prismatic joints of the five limbs constitute the drive of a 4SPRR-SPR parallel robot. Therefore, the inverse position solution of the parallel robot can be regarded as the calculation of the rods AiBi about the length li using the coordinates of the known points D and direction vectors
The geometric condition of the parallel robot is determined using equations (1) and (2).
Where
As shown in Figure 3, the ith limb is considered for the analysis. Ei is the vertical foot from Ai to DCi. From the geometric relation, the result is deduced using equations (6) to (8).



The coordinates of points Ci and Bi can be obtained upon calculating ci. Accordingly the input parameter li corresponding to the pose can be obtained.
The main structural parameters of 4SPRR-SPR parallel robots are the coordinates of points Ai (i = 1,2,…5) and rod lengths ci and di. The above parameters can determine the corresponding parallel robot for inverse kinematics calculation.
The inverse kinematics solution of the robot is calculated considering the structural parameters shown in Table 1 as an example.
The structural parameters of the parallel robot.

By determining the position and posture of the moving platform, the coordinate of point D and the direction vector
The calculations of parallel robot.

System identification of non-linear dynamical system using VQTAM
The forward kinematics of the parallel robot aims at solving the corresponding pose given the length of drive limbs. The pose of the end effector is regarded as output
Where
The purpose of forward kinematics is to recognize the mapping relation f(·) from input to output. For a non-linear problem without formulaic solutions, simplifying the model can guarantee efficiency and ensure favorable real-time performance in engineering applications.



VQTAM is an extension of SOM, which can be used as an effective manner to realize non-linear mapping. The concept of non-linear manifold embedding can be used to establish the non-linear mapping. SOM is realized through competition and cooperation among feature neurons. Different neurons are activated for different inputs, and the activated neurons affect the output together with the neurons in their neighborhood. Therefore, time series data can be constructed as the training samples of VQTAM.
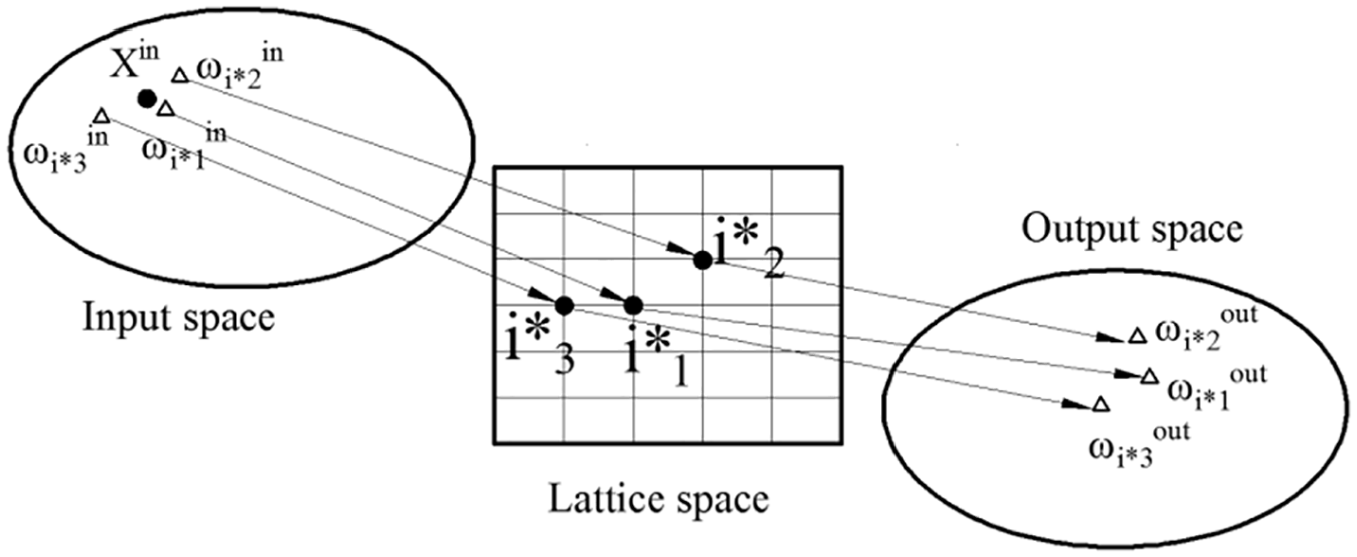
VQTAM uses the training samples to build a topological structure embedded in multi-dimensional data space, which can construct the mapping relationship between multi-dimensional input vectors and multi-dimensional output vectors. The VQTAM network consists of three layers: input space

VQTAM spatial mapping.
The input space and output space are composed of weight vectors


Learning strategy of VQTAM
The main parameters of VQTAM are neuron weight vector
There is competition and cooperation among neurons in SOM. Different neuron and their neighborhoods are activated by input to participate in the learning process, and the weight vectors
In order to improve the convergence rate in the learning process, the influence range parameters σ(t) of the activation neuron and the learning speed α(t) decrease exponentially with the learning epoch, as shown in equations (14) and (15).


Where t is the current learning epoch, and T is the total learning epoch. α0 and σ0 are the initial value, and αT and σT are the parameter value of training epoch T.
The Gauss neighborhood function is used to determine the effect of input on the neighbors of activated neuron, as shown in equation (16).39–41



To sum up, the steps involved in the VQTAM algorithm are as follows:
(training part)
Begin
Input:
for
End
(testing part)
Begin
Input:
for
Output:
End
Searching activated neuron by priority search K-means tree algorithm
The weight vector
The priority search K-means tree algorithm is to divide the space into B different regions using k-means clustering algorithm. Then, the points in each region are partitioned by the same operation until the number of data points in the region is not more than K. In the process of searching, the idea of “divide and conquer” is used to find the nearest point in a smaller area and reduce the amount of data to be searched, so as to improve the efficiency.
The algorithm of establishing a priority search K-means tree data structure is as follows:
Begin
Input: D←
/*B is branch parameter, and Imax is maximum iteration number. */
if |D|<B
Create leaf nodes from data sets
else
P← uses Calg algorithm to select B points from data set D
for
do
C← clustering data in D centered on Pj
Pj new ← finding the mean value of group C data after clustering
while (P = Pj new & Pj new is the non-leaf node)
Output: the entire K-means tree data structure
In the establishment of K-means tree, the algorithm Calg used to select B points from data set D can be chosen from random selection algorithm, Gonzale algorithm and K-Means++ algorithm. The specific algorithm has little effect on data structure establishment. Generally, random algorithm is recommended. 42
In the built K-means tree, leaf nodes are the data points in the original data set, and non-leaf nodes are the central points of the regions after segmentation. The search process can only be executed in a few areas, thus avoiding the global search of data sets. The K-means tree data structure is searched from the root node. Sub-nodes are sorted according to the distance between the clustering center and the query data points. The nearest sub-nodes are searched in advance. The priority K-means tree search algorithm is as follows:
Begin
Input: K-means tree, Q, K, L
/*Q is the query data X in ; K is the nearest neighbor number; L is the maximum number of search data */
S← the root node /*Initialize a stack S and place the root node in the stack*/
do
if S(0) is a leaf node
P←S(0) /*Add S(0) to the retrieved data array P */
else
remove S(0), E←sub-nodes /* The top node goes out of the stack*/
S←push(sort(E))
while (isempty(S) & length(P)<L)
Output: P(0 to K-1)
End
VQTAM local linear improvement algorithms
The VQTAM algorithm is used to quantify the input space
Local linearization is performed in VQTAM networks. The K-means tree algorithm is used to search the nearest n data points
Local linearization of VQTAM network.
Improvement algorithm of VQTAM with LLR
It’s assumed that the relationship between local input and output can be expressed linearly, so the LLR can be performed as shown in equation (19).


The linear relationship between the local input and output can be obtained by solving


The column vectors of

Where

The input Xin is used to estimate the output, as shown in Formula (26).

Improvement algorithm of VQTAM with LWR
The impact of all neighbor points on the prediction results is consistent in LLR algorithm. Considering the different influence of neighbor points, a distance weight is added in the regression process. A local weighted linear regression (LWR) is performed. The cost function is defined as shown in equation (27).
The weight wk in equation (27) is determined using the Gauss neighborhood function, as shown in equation (28), where τ is the bandwidth parameter.


The analytical solution of the cost function minimization is equivalent to the solution of the over-determined equation shown in equation (29).

The SVD for matrix


Improvement algorithm of VQTAM with LLE
It’s assumed that input data can be represented by a linear combination of several samples in its neighborhood. That is to say, the input X
in
to be predicted is represented by a linear combination of n data points in its neighborhood in the input space

The output has the same linear combination.

ck is the coefficients of the linear combination. The output can be estimated using equation (33) after solving ck. Define the cost function as shown in equation (34) and rewrite it as a matrix.
For the least squares problem as shown in equation (33), it can also be solved by SVD of

Simulation results and discussion
Standard VQTAM network test results
The poses for the sample set are generated according to the robot parameters listed in Table 1, using equations (25) to (30). The generated data can effectively cover the entire workspace of the manipulator.






where t∈[0,1000] and step t = 0.01. Thus
Table 3 shows the hyper-parameter setting of the VQTAM network training. A VQTAM network of dimension 80×80 (Mx×My) is trained based on the hyper-parameters, and the effect of training is evaluated using the test set.
Hyper-parameter setting of VQTAM.

Root mean squared error (RMSE), R squared (R2), and root mean absolute error (RMAE) are used to evaluate the prediction accuracy of VQTAM for forward kinematics. Table 4 shows the prediction accuracy of the six parameters in output calculated using RMSE, R2, and RMAE.
RMSE, R2, RMAE of standard VQTAM network.

The value of R2 is between 0 and 1. The closer it is to 1, the better is the effect of the regression fitting, which means that the learning VQTAM network is more accurate as an approximate model. Generally, R2 > 0.95 can be used in engineering applications. For VQTAM networks of dimension 80×80, the R2 values after learning are all above 0.95. This shows that this network is suitable for engineering applications. The RMSE and RMAE reflect the prediction errors in the VQTAM network, and their small values also indicate the prediction accuracy of the network. The convergence result in neural network training process is shown in Figure 6.
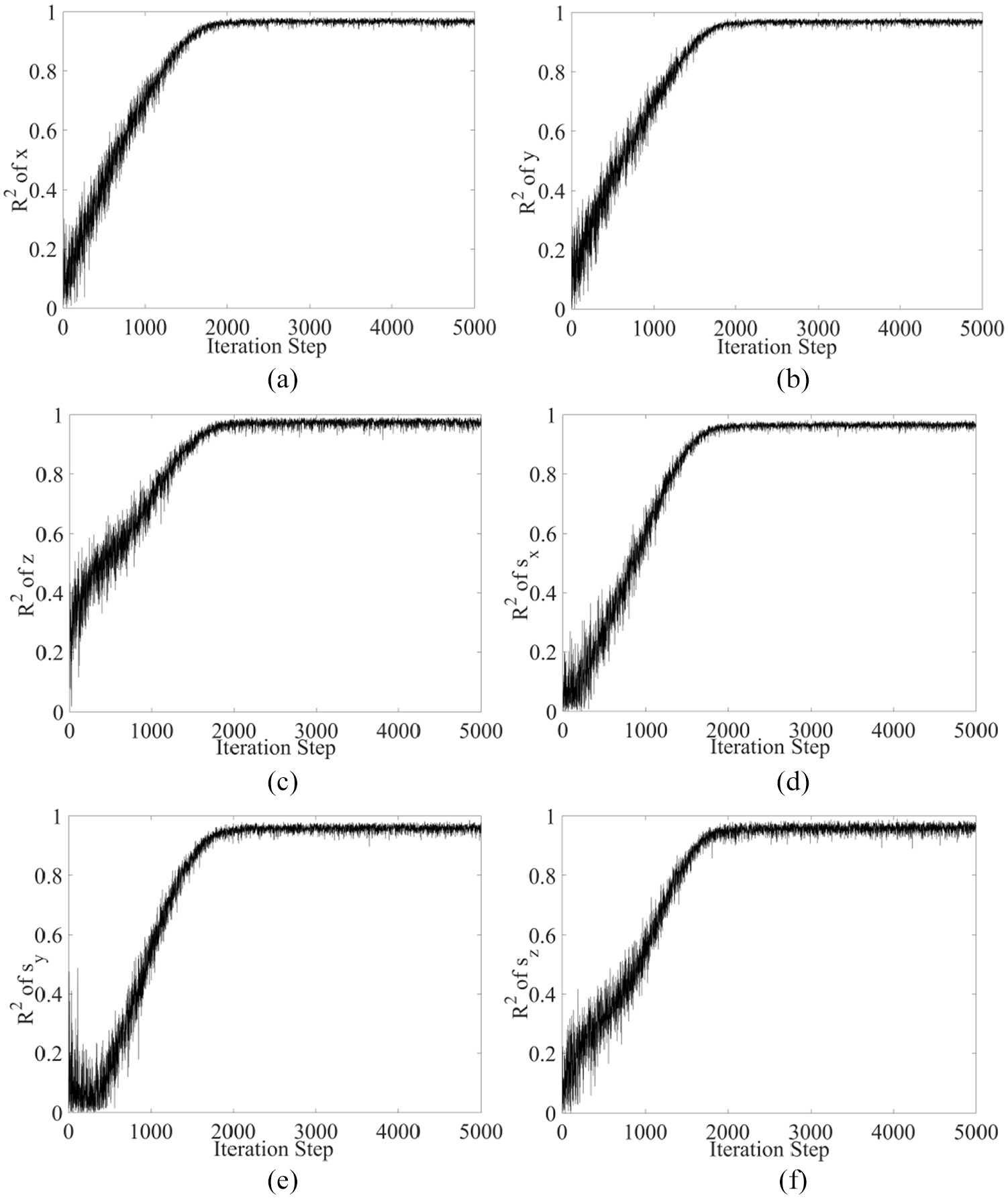
Convergence result. (a) Prediction accuracy of x in the training process. (b) Prediction accuracy of y in the training process. (c) Prediction accuracy of z in the training process. (d) Prediction accuracy of sx in the training process. (e) Prediction accuracy of sy in the training process. (f) Prediction accuracy of sz in the training process.
It can be seen from Figure 6 that the R2 of the VQTAM neural network tested using the test set in the training process gradually increases and converges near 1. This confirms the effectiveness of the VQTAM neural network training algorithm.
The consistency between the actual data and the estimated data can be displayed more intuitively through box diagrams, as shown in Figure 7. The box diagrams of the actual values and predicted values are notably similar, which verifies the excellent prediction ability of the VQTAM network of dimension 80×80.

VQTAM network prediction effect box diagram.
VQTAM local linear improvement algorithms
The output of the inverse kinematics problem is estimated using the VQTAM local linear improvement algorithms. The priority search K-means tree search algorithm is used to search the neighbor data of the input. The influence of parameter k on the prediction accuracy is analyzed, considering a VQTAM network with dimension 70×70 as an example, as shown in Figure 8.

The influence of the k-nearest neighbor number in the improvement algorithm of VQTAM with LLR.
Figure 8 shows that R2 of each parameter increases continuously with the increase in k, at first; and it gradually increases to more than 0.95. This indicates the influence on the prediction accuracy. When k = 7, the overall prediction accuracy is the best.
Figure 9 shows that R2 for all variables is more than 0.95 when k = 3. Comparing Figure 8 with Figure 9, the overall prediction accuracy of LWR algorithm is higher than that of LLR algorithm. Comparing among Figures 8 to 10, the overall prediction accuracy of improvement algorithm of VQTAM with LLE is the highest. When k = 7, the overall prediction accuracy is the best. In conclusion, when the number of neurons is small, the prediction accuracy of network can be improved by combining local linear algorithm.

The influence of the k-nearest neighbor number in improvement algorithm of VQTAM with LWR.

The influence of k-nearest neighbor number in improvement algorithm of VQTAM with LLE.
Overall examples and test results
According to the VQTAM network parameters shown in Table 3, the prediction accuracy of four algorithms under different network dimensions (30×30, 40×40, 50×50, 60×60, 70×70, 80×80) is studied, as shown in Figure 11. The number of the nearest nodes of the local linear algorithm is set to k = 7.

Prediction accuracy of 4 algorithms. (a) Prediction accuracy of standard VQTAM network. (b) Prediction accuracy of improvement algorithm of VQTAM with LLR. (c) Prediction accuracy of improvement algorithm of VQTAM with LWR. (d) Prediction accuracy of improvement algorithm of VQTAM with LLE.
Figure 11 shows that an increase of the number of neurons results in a significant increase in the prediction accuracy of the four algorithms. The overall prediction accuracy of improvement algorithm of VQTAM with LLE is the highest. Local linearization of VQTAM yields remarkable results. Using the improved VQTAM algorithm, the prediction accuracy of a network of dimension 50×50 is found to be close to that of the standard VQTAM network of dimension 70×70. Considering improvement algorithm of VQTAM with LLE as an example, the output of the forward kinematics is estimated, as shown in Figure 12. The estimated poses are compared with the actual poses. This shows that the VQTAM neural network can effectively estimate the output

Forward kinematics output estimation. (a) Forward kinematics output estimation of x. (b) Forward kinematics output estimation of y. (c) Forward kinematics output estimation of z. (d) Forward kinematics output estimation of sx. (e) Forward kinematics output estimation of sy. (f) Forward kinematics output estimation of sz.
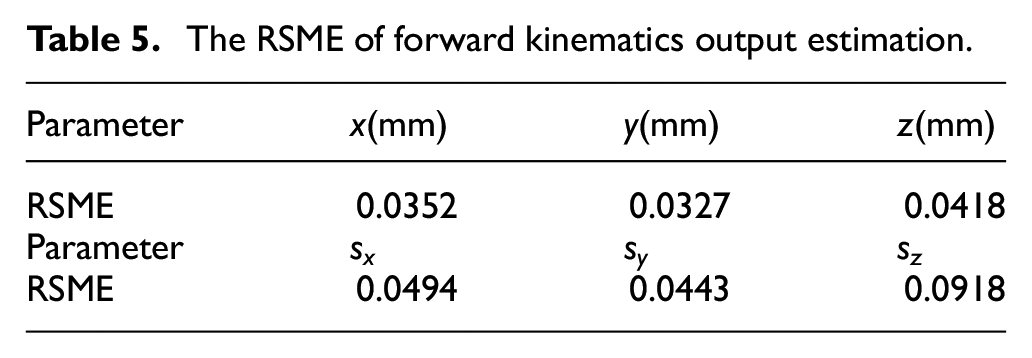
The error of VQTAM can be obtained by comparing the result with the actual pose of the robot. The RSME for position estimation is less than 0.1mm, as shown in Table 5. This precision has met the control requirements of general robots in industrial applications.
The RSME of forward kinematics output estimation.
Conclusion
The kinematic of 4SPRR-SPR parallel robot is studied, and the inverse kinematics solution by a geometric method is derived. Given the input pose of the robot, this method can be used to calculate the lengths of the drive limbs conveniently and quickly. It can also be used as the computational basis of VQTAM network to establish sample sets.
A fast forward kinematic mapping method for parallel robots using VQTAM for non-linear dynamic systems identification is proposed. The VQTAM algorithm is constructed to train and test the neuron network. Based on the priority K-means tree search algorithm, the training, testing and estimating process of VQTAM network are improved to enhance the search efficiency of nearest neighbors.
According to local neurons activation, the VQTAM network is improved based on local linearization. To further optimize the prediction accuracy of the network, reduce the dimension of the network in application, the improved local linear algorithms for VQTAM networks are proposed.
The sample data set for VQTAM training is constructed. The VQTAM algorithm and its improved algorithm are tested. The test results show that the increase of network dimension can improve the prediction accuracy of VQTAM, but the computational efficiency is affected. By using VQTAM local linearization improvement algorithms, the estimation accuracy can be optimized for low-dimensional network. The above algorithm can show good prediction accuracy, and the prediction effect of LLE algorithm is the best among the three algorithms.
Footnotes
Acknowledgements
The authors would like to acknowledge the financial support.
Handling Editor: Lianjun Wu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project is supported by National Natural Science Foundation of China (Grant No. 5187052280) and by Economic and Information Commission of Sichuan Province (Development of Normal-position Intelligent Manufacturing Technology and Device for Major Equipment).