
Abstract
Legged robots demand to keep the balance under required durations when performing standing and locomotion. It may be a challenge for legged robots to maintain balance during standing without actuation from ankle joints and involvement of support polygon plane to estimate the center of mass (CoM). In order to maintain the standing balance of legged robots under such a scenario, we propose a virtual suspension model control (VSMC) method which is concise and can get rid of updating model iterations on sophisticated dynamics. Furthermore, we optimize the range and propose the criteria for the virtual height of the CoM for quickly adjusting parameters and adapting to task characteristics. Simulation experiments on balance keeping are performed for single-leg robot vertical standing, quadruped robot diagonal standing and biped robot parallel standing cases, and the proposed method can achieve promising results within the approximative real setting condition that demonstrate the feasibility and strong anti-interference ability of the VSMC approach.
Keywords
Introduction
The ability of legged robots to maintain balance is fundamental before performing locomotion tasks. Currently, there are two mainstream manners to maintain balance for legged robots, one is to let legged robots keep immobile standing or low-speed pace state, while another is to configure constant apace leg motion. For the former one, it demands the Centre of Gravity (CoG) to be within the area inside the convex region of the supporting,1–3 and another formulation under normal circumstances for achieving dynamic equilibrium is to require the zero moment point (ZMP) to be within the support boundary.4–7 Usually, biped robots take ankle and hip strategy single or mixed to counteract perturbations or the gravity moment but can not satisfy both translational and rotational of the CoM due to the coupling effects, and also requires the soles with certain area and ankle to react with the ground for ankle strategy.8–10 For the latter one, the most traditional way for constant jumping to keep balance is Raibert’s one-leg hopping and its extension to quadruped and biped robots that they may need touch down with nearly point contact.11,12 The standing balance has the upside of less energy consumption and presents different natural stability ranges according to the formed supporting polygon area. The downside is that it requires additional end structures or multiple support legs. The dynamic movement is just the opposite, with higher consumption, but simpler end mechanism.
Without ankle and soles, the pivot that calf end contact approximative point or line is one or two underactuated degrees of freedom (DOF) with no torque control that makes the control problem particularly tricky. There are several methods have been put forward before ours. Emura and Arakawa proposed a reaction-wheel-type inverted pendulum method to control quadruped standing with diagonal feet for short instant. 13 The LQR-based model transformation method proposed by Meng et al. needs restrictions on modeling to guarantee control performance. 14 Ding et al. built a double inverted pendulum robot model under a pole placement method to balance a bipedal robot. 15 Through adding extra devices such as reaction wheel systems, Maurice et al. achieved the underdriven biped robot posture balance in which the initial state is deviation. 16
As an intuitive control method, virtual model control (VMC) utilizes virtual components to generate the desired joints torque. The VMC approach reduces the complexity of motion control and has a relatively lower computation consumptions through a discrete high-level controller which can produce fluid motion automatically. Due to these advantages, the adaptive terrain stable walking and attitude stabilization of the biped robot are utilized by Pratt et al.17,18 Hu et al. proposed an adaptive VMC method to improve the robustness of controlling biped robot walking by using an adaptive sliding control approach in virtual space which means that the VMC method has the development potential of adaptation. 19 Zhang et al. applied the modus to quadruped robot going upstairs and uphill and also proved that the quadrupeds could self-stabilize with their method. 20 Xie et al. proposed to use the decomposed VMC to control the diagonal axis of the torso being effectively when the diagonal foot is touching the ground and applied VMC to constraint the swing foot end as going with planned trajectory. 21 Desai et al. developed a VMC controller to increase humanoids lateral balancing ability based on the assumption that humans prefer an intuitive task-space control for lateral balancing. 22
Havoutis et al. used mass-spring dampers to produce actively compliant behavior for dissipating unexpected perturbation when quadruped robot with trotting gaits, and barely changed the parameters of the virtual component. 23 Huang et al. proposed a suspension model applied to a hexapod robot to reduce vibration during walking. 24 In addition, the VMC method is also appropriate to parallel mechanisms and used for hexapod robot walking with tripod gait proposed by Pratt, Torres et al.25,26
In this paper, we divide the standing balance issue into the overall balance and the attitude balance. We propose a virtual suspension model control (VSMC) method that generates a virtual spring-damper force based on the position discrepancy to drag the body. It requires the cascade joint as a closed-form to obtain the ground reaction force (GRF). We believe that the level of control is critical, first of all, to satisfy the overall posture balance relative to feet, and secondly to fine-tune the body attitude based on a position discrepancy from the end of virtual height (VH) where we make this sequencing process naturally transition. By adopting this approach, the simulation shows that the legged robots can maintain balance on foot in which the support area in line or point and can resume balance promptly after suffering strong unexpected perturbations. To further increase the difficulty, we separately validate the legged robots’ ability to adjust the attitude to maintain balance under dynamic slope disturbances and the CoM distribution outside the support area fixed on the ground.
The main contributions of the paper can be summarized as follows:
An intuitionistic virtual suspension model which can effectively maintain the standing balance of a legged robot that without specific support polygon area is proposed.
The robot’s attitude can be transformed into the position space by the VH, and the design principle on the friction factor and feasibility is addressed.
Simulative experiments on three types of legged robots demonstrate that the proposed method can maintain the standing balance promisingly.
We organize this paper into the following sections to address. In Section 2, we firstly investigate the fundamental single-leg model in legged robots in the
VSMC applied on single-leg
In this section, the formulation of the VSMC method is introduced and investigated based on the single-leg robot model, which shown in Figure 1. For a cascade leg system, the dynamics can be written as

where
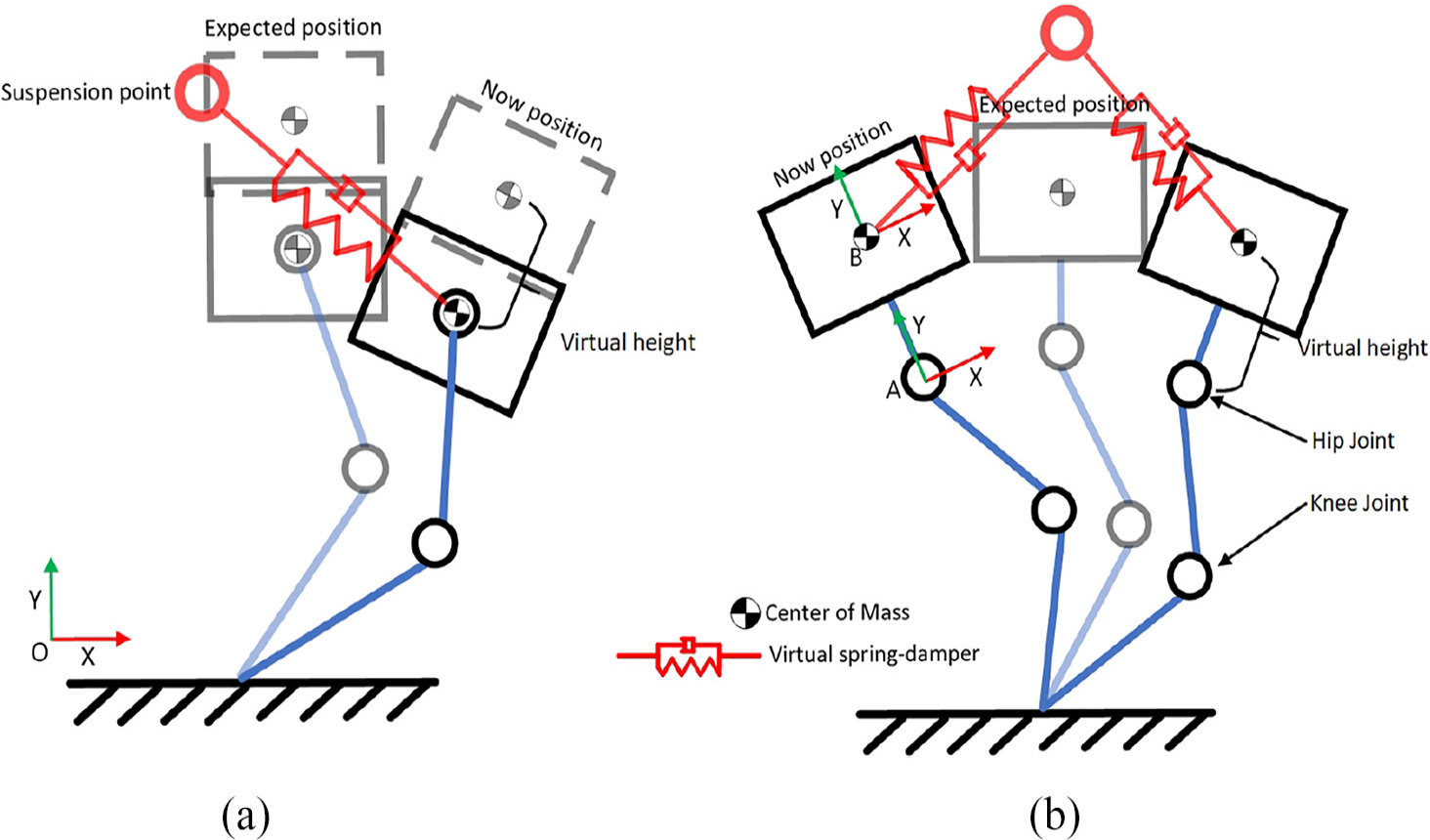
(a) Feasibility of the VH when the CoM coincides with the hip joint. (b) The corresponding CoM at the end of the VH.
The conventional VMC method usually takes joint actuators in a closed-form to produce intuitive virtual forces through virtual components. However, the definition of the virtual components object in VSMC is outside the cascade joint to restrict the CoM movement. The virtual components we define are spring dampers and suspension points with pre-designed parameters. The suspension points can be the desired position of the CoM in the global frame but no specific practical role except for guidance, and the spring dampers are the link to the CoM successively towing.
Virtual components can be composed of three coordinate frames as action frame
To maintain a balanced target relative to the ground, the cascade joint can obtain GRF in reaction frame
The VH is the distance that the
Single-leg implementation
Due to the physical characteristics of the suspension model, we describe the CoM as a floating object in the global frame

Where

where

where
Virtual forces are generated along both the position and attitude vectors

Thus, the comprehensive virtual vector force is the sum of

Forward kinematics
27
which describes the relationship between

where
Due to the task requirements of standing balance,

where
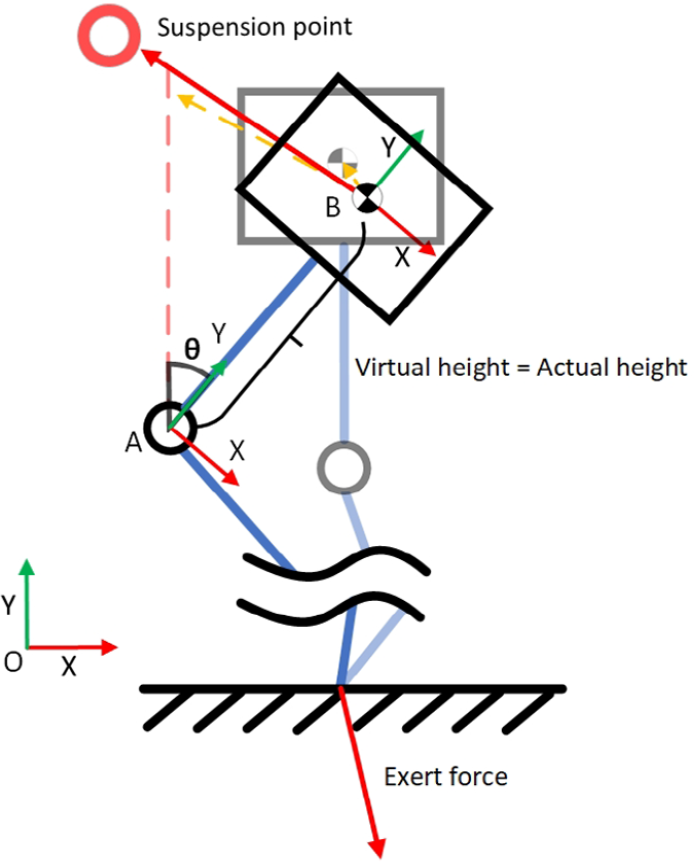
Use the exert force to represent the virtual suspension force. At this point, the VH
The purpose of the robot to keep balance is to minimize the
Appropriate Virtual Height (VH)
The initial state of the robot is almost stable and meets the prospective position and attitude. When the VH is very approaching to 0 m or too small, the robot can reach the position expectations easily, yet the attitude gradually loses control. When the VH is too large, the generated virtual force will not suffice the limit of the ground friction factor. Therefore, the appropriate VH is necessary, which allows the position and attitude vectors to establish the proper virtual force and maintains the robot’s balance under the limitations.
We regard the CoM position control as a kind of overall attitude control relative to the foot, and the CoM attitude control is relative to the

Use
For friction factor limitations, there are several ways to limit this effect as follows.
The virtual spring is with the smaller stiffness;
The robot restores to the desired attitude is a gradual transition;
The virtual force of the VH contribution should be less by employing the appropriate VH.
For (i), it is a challenge to reach the fast and stability of the VSMC. The transition method in (ii) has no theoretical basis for determining the proper segmentation. Thus, this paper mainly focuses on (iii) and analyzes the theoretical stability range of criterion for equilibrium positions to manage the applicable VH.
We designate the actual height
The cascade leg gains GRF of the suspension model as

where

As we can ignore the friction generated by gravity and position difference, the following restriction can be written as

In addition to the friction force, the VH value has a bottom-line requirement that reflected in torque. The

Correspondingly, the torque produced by VH can be described as:

Similarly, to reach the goal of standing balance, it demands that the torque of the VH

We subtract the inequalities and combine the two-part contract can roughly recognize the range in which the VH matches the requirements under the given parameters in Figure 4. Then, it necessitates meeting two primary conditions as
Limit friction is higher than actual friction;
The VH torque is higher than the gravity torque.

The upper and lower limits of the virtual force are divided into two parts: friction and required torque. The friction coefficient
Additionally affirming the preconditions, the proper constants
Virtual model implementation for three robot models
Keeping the dynamic balance of legged robots while standing still is a vital subject where we implemented the VSMC. The practical application of this paper is on the problems of quadrupeds standing on diagonal feet, bipeds standing on parallel feet and single-leg robot vertical standing. We demonstrate the effectiveness of our method by building the robots simulating in Webots R2020a, as shown in Figure 5. Robots can be efficiently modeling in Webots which relies on ODE(Open Dynamic Engine) to perform accurate physics simulation, the controller for some robot model given in software can be transferred to real robots directly once tested. 28 We build properties proximity to real robots and summarize the parameter attributes of three legged robots in Table 1.

Three types of legged robots are balancing in Webots.
Parameters of leg robots with common leg system.

The vector sum of the forces of each cascade leg in the three-dimensional space can be used to represent the support force to the body. We distribute the suspension model to each support leg, just like the suspension system of a vehicle.29,30 Since then, our proposed method naturally converts the body torque control amount into the task space and no necessity to consider the body torque constraint.
18
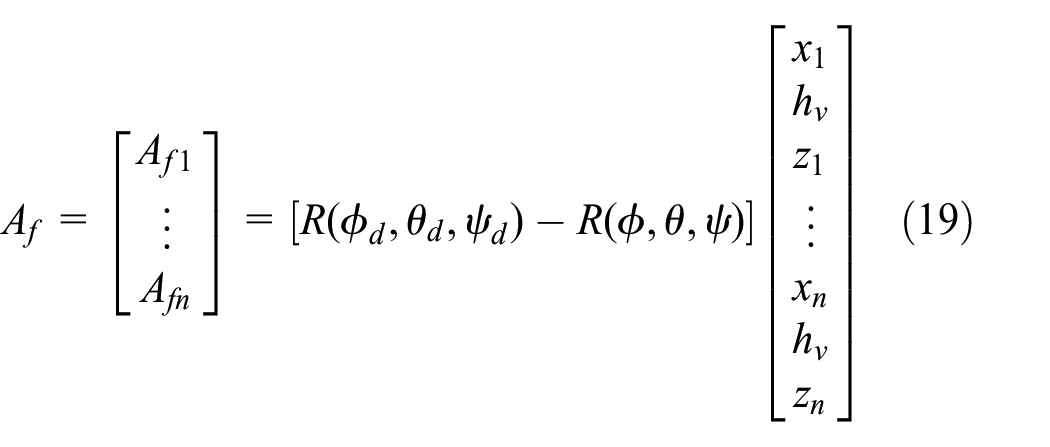
Regard the integrated vector force at the CoM as
Here we redefine equation (2) for a multi-legged robot system.

As in equation (3),

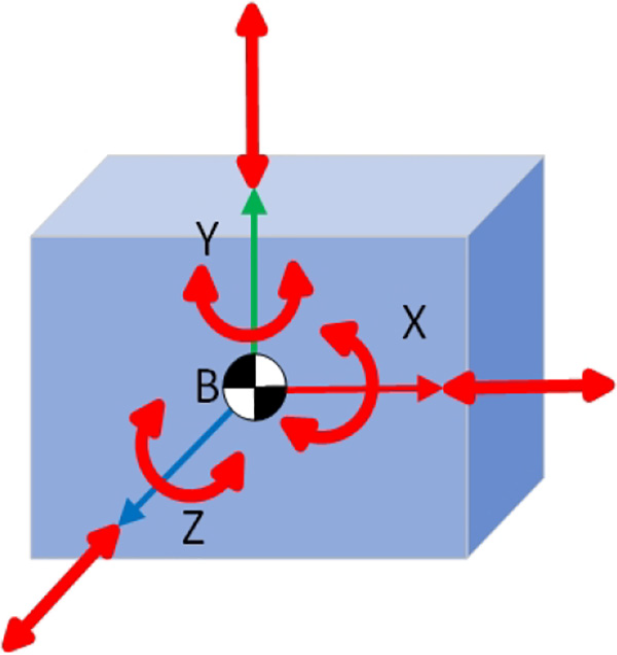
with the oration matrix being defined based on the frame in Figure 6 as

where
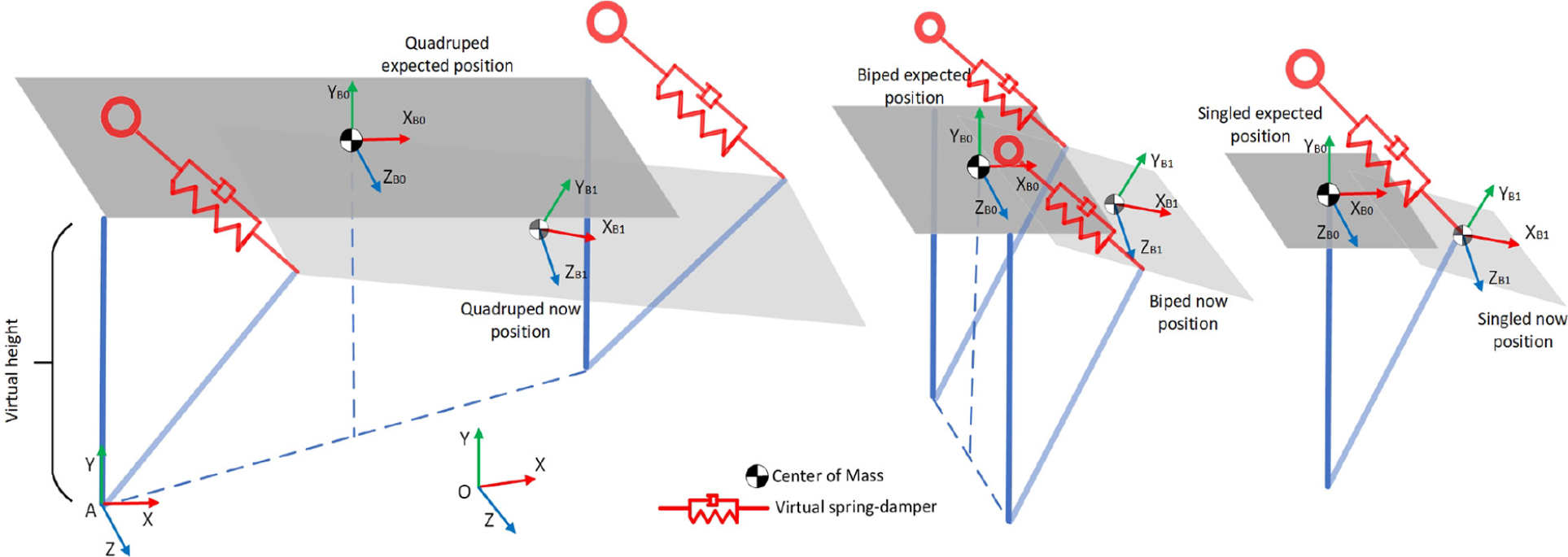
Virtual suspension model control for quadrupeds, bipeds, and single-leg robots maintain a balance diagram,
The constraint of the VH on attitude indicated by
Therefore, the virtual force

with

where
Due to balanced purpose requirements, we set the number of support legs
For the design of the robot feet, as in the real world, we set the feet shape to be spherical, and ensure the continuous contact process at varying contact angles. However, it also leads to an obstacle. The contact point between the foot and the ground is changing with the attitude adjustment, and the impact will be specifically explained and displayed in the simulation experiment.
Comparison between VMC and VSMC
VSMC can be regarded as a generalized VMC. Different tasks may result in a different definition of VMC for constraining single or multiple rigid bodies. VSMC embodies the body constraint and the key point is to transform the attitude constraint through the VH so that the final constraint force is directly the GRF. Besides, the design of VSMC implies the rules of stability of balancing that is the position is always adjusted before the attitude is satisfied. The natural properties of VSMC lead to a stabilizing effect, but most VMC designs have no stabilizing characteristics since they are intuitional. In Figure 7, a conventional virtual mechanical component to constrain the six degrees of freedom of the rigid body is shown. This conventional VMC case uses linear spring-dampers to constrain the position in the world frame, torsion spring-dampers to constrain the attitude that obtains wrenches in the body frame to allocate to the contact points. The specific process is realized in the source code as an attachment to this paper. The simulation results of this conventional VMC paradigm will be shown in the ensuing section.
A kind of conventional VMC method constrains the body to maintain attitude and position. The double-headed arrows are simplified spring-dampers.
Simulation experiment results
We experimentally built three robot systems with the same leg system and parameters, and three controllers with similar structures by Python 3.7. The control frequency is
The robots are unexpectedly perturbed.
The robots stand on a slope and we disturb the slope.
The CoM is distributed outside the support polygon to resume balance.
Virtual suspension model control balance experiment parameters.

The VSMC sets parameters which are mainly physical parameters of virtual components based on task features. The hardware determines
Before examining our method, we firstly compare it with the conventional VMC method to illustrate the feasibility and initial advantages of ours. We let the three robots stand on the flat ground with diagonal feet or single foot and give slight noises, the robot would gradually overturn if the system is unstable. We can see that the balance maintaining time for the three robots are respectively in Table 3, which indicates that the direct VMC constraints do not exhibit the balance characteristics and the robots fall over when around 1s, but the VMSC can always balance which is the preliminary requirement of the further challenge.
The time of three robots maintaining balance by VMC and VSMC.

Quadrupeds diagonal standing
We set the quadruped robot to initially stand on four feet to ensure the position of the CoM, followed by two legs are raised, and the others are supporting legs with torque control by VSMC. The coronal plane for quadrupeds is more arduous to accommodate unexpected perturbation where we implement a controllable pendulum ball to strike the body and record the energy of the impact when in contact.
23
Additionally, we place the quadrupeds on a dynamic slope to examine its balance and attitude adjustment capabilities. The gradual slope is rotated around the

Unexpected perturbation and dynamic slope disturbance examination of the quadrupeds. (a) After the quadrupeds receive the perturbation of the pendulum ball,

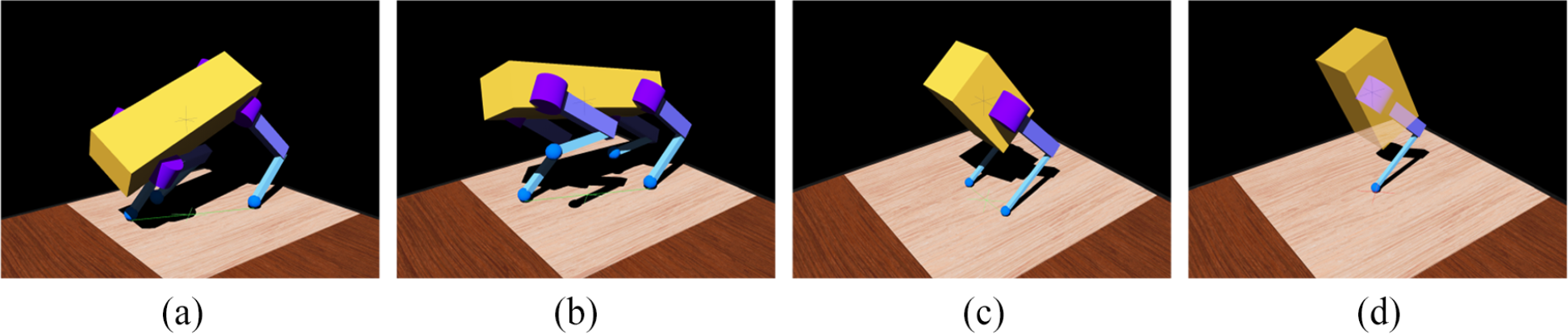
Snapshots of quadrupeds, bipeds, and single-leg robots while suffering unintended perturbation.
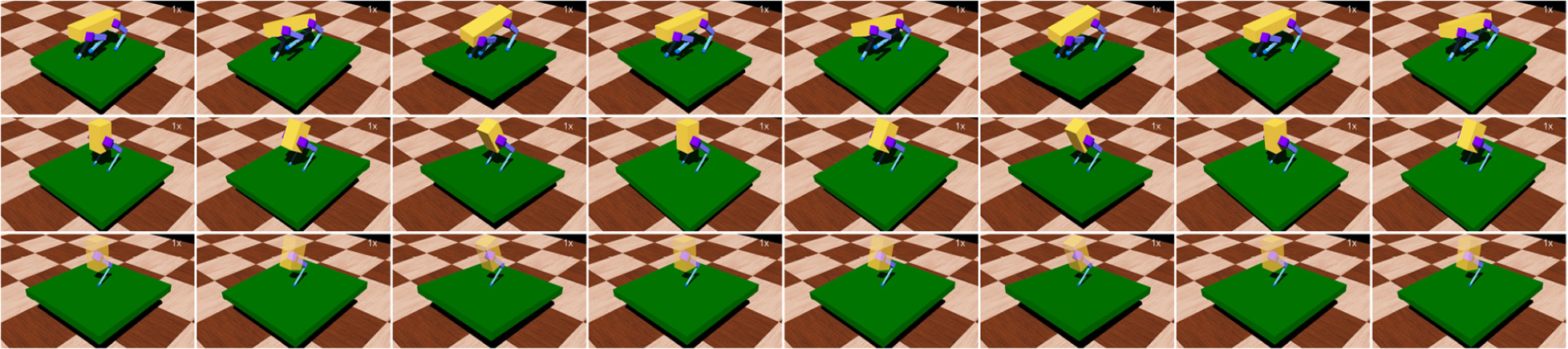
Snapshots of quadrupeds, bipeds, and single-leg robots while suffering dynamic slope disturbance.
Following the quadruped robot receives the unexpected perturbation, there is no apparent shift in the position of the CoM relative to the change in attitude angle. The attitude changes obviously and gradually resumes, which is comparable to the effect of a spring-damper dragging object. The entire process satisfies the two requirements mentioned before. For this perturbation, the experimental outcomes are astounding. Theoretically, the quadrupeds can be perfectly balanced on a static or dynamic slope. However, the spherical foot causes the support point to move on the ground when the overall posture is deflected. The beneficial aspect is that this effect reduces the CoM and the support point moment. Despite this, the CoM adverse effect on balance is on the slope. Figure 8(b) shows that the robot exhibits periodic adjustment behavior on a regular dynamic slope. When in the static hill, the robot will eventually balance to a specific attitude, and the impression is similar to the outcome of the CoM shift.
The projected position of the CoM in support polygon is critical to maintaining balance. Under our premise of balance, it demands that the CoM almost coincides with the support line, but the real robot is not so ideal. Accordingly, we examine the extreme centroid offset that maintains no fall under the given parameter. In the
Centroid offset and balanced attitude.
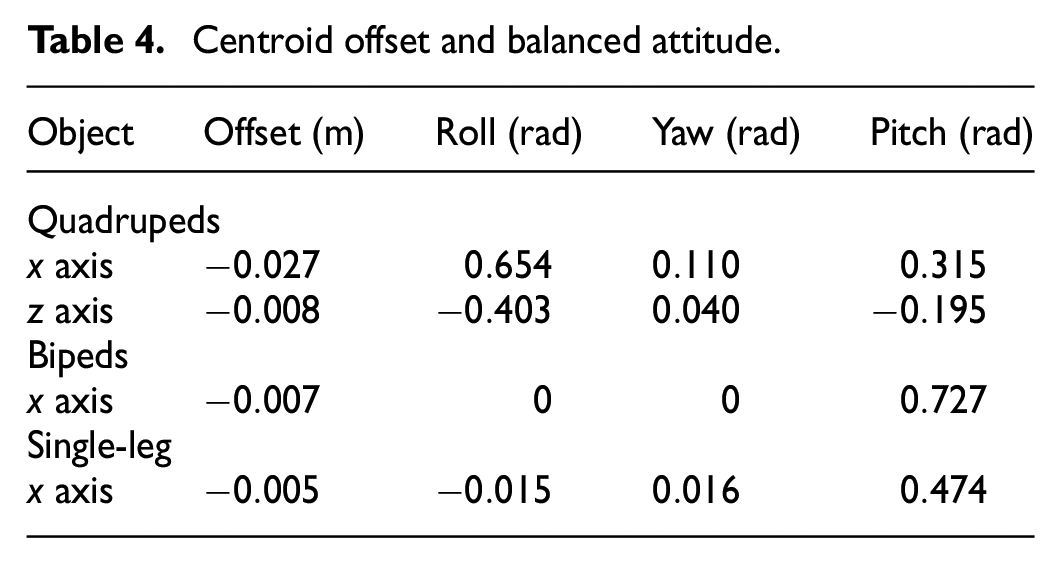
Screenshots of the robots’ stable attitude after the CoM shift in frame
Bipeds parallel standing
Similarly, we performed the three experiments on the biped robot. We implement perturbation to the sagittal plane to maximize the effect, record the impact energy and detect states such as Figure 12(a). Regular and periodic dynamic slope application results such as Figure 12(b). Also taking snapshots of both procedures are separately exhibited in Figures 9 and 10. The effective direction for the centroid shift is along the

Unexpected perturbation and dynamic slope disturbance examination of the bipeds. (a) The bipeds hit by the perturbation of the pendulum ball is
Since the perturbation is mainly along the
Single-leg standing
The single-legged robot is relatively unique, and it cannot actively maintain the yaw angle due to leg structure and point contact. The leg is bent which makes the structure asymmetric, the disturbance in the

Unexpected perturbation and dynamic slope disturbance examination of the single-leg robot. (a) The single-leg robot hitten by the perturbation of the pendulum ball along
According to consequent, the single-legged robot experiment is similar to the biped robot. Because it cannot guarantee the yaw angle and the asymmetry of the structure exacerbates the yaw deflection when the roll is tilted, the single-legged robot is exceptionally vulnerable. We attempt to regularize the two angle disturbances of the floating platform similar to the experiment on quadrupeds and bipeds which causes the support point to move along the spherical arc surface, and the yaw angle gradually oscillates. At the same time, it also creates a continuously enhanced centrifugal result and eventually overturns. Of course, utilizing the VSMC to stand still on the plane is entirely satisfactory. Consequently, we barely make a relatively small offset of the CoM along the
Conclusion
This paper addresses that the virtual suspension model control successfully solves the problem that the robots with the support line or point maintain stand balance. We re-integrate the attitude control amount into the task space for execution by the virtual height variable, which is mainly manifested in the force control of the leg system in closed-form, and ankle joints are not required for restraint attitude. Inspired by the physical characteristics of the suspended object of the spring damper, we use the reaction effect of the force exerted by the legs to approach. For the virtual height variable, we propose a suitable range of criteria to facilitate faster adjustment of parameters and adaptation to task characteristics. To this end, we construct three types of legged robots without ankle joints with the same three-degree leg system and performed three experiments on them, unexpected perturbation, dynamic slope, and centroid shift. Experimental results show that our method can resist perturbation and slope disturbance when the robot is standing statically, and it can tolerate a certain amount of centroid shift. Different from Raibert’s need to keep balance by non-stop hopping, our method is exhilarating to fill the gap of robots standing balance in our conditions. We believe this will improve the balance of motion of multi-legged or single-legged robots.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China under Grant U1613223 and 61603078 and the Fundamental Funds for the Central Universities.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.