
Abstract
Permanent magnet synchronous motors are the main power output components of electric vehicles. Once a failure occurs, it will affect the vehicle’s power, stability, and safety. While as a complex field-circuit coupling system composed of machine-electric-magnetic-thermal, the permanent magnet synchronous motor of electric vehicle has various operating conditions and complicated condition environment. There are various forms of failure, and the signs of failure are crossed or overlapped. Randomness, secondary, concurrency, and communication characteristics make it difficult to diagnose faults. Based on the research of a list of related references, this article reviews the methods of intelligent fault diagnosis for electric vehicle permanent magnet synchronous motors. The research status and development trend of fault diagnosis are analyzed. It provides theoretical basis for motor fault diagnosis and health management in multi-variable working conditions and multi-physics environment.
Keywords
Introduction
Faced with the shortage of energy and environmental pollution, the development and use of new energy vehicles has become an important way to ensure China’s energy security and transform low-carbon economy. “Made in China 2025” and “Technology Roadmap for Energy Saving and New Energy Vehicles” point out that new energy vehicles will gradually become mainstream products of automobiles, and the automobile industry will initially realize electrification transformation in the next 15 years. Under the guidance of the strategy of “innovation-driven development,” the “Regulations on Access to New Energy Automobile Manufacturers and Product Management,” which was implemented from 2017, requires new energy vehicle enterprises to continuously carry out technological innovation. A monitoring system should be established for the operation safety status of new energy automobile products to protect the lives and property of the people and the public interest system to protect the lives and property of the people and the public interest.1,2
At present, the research direction of electric vehicles has focused on the “three-electric technology” of power battery, drive motor, vehicle electronic control and the performance matching technology of the three. But the safety monitoring and fault diagnosis of the drive motor are less involved. The drive motors used in new energy vehicles mainly include DC motors, asynchronous motors, permanent magnet synchronous motors, and switched reluctance motors. Among them, permanent magnet synchronous motor has the advantages of high efficiency, small volume, high power density, and wide speed regulation range. It has a wide range of applications in electric vehicles. Statistics show that its utilization rate is as high as 52%. 3 However, compared with other machinery, the permanent magnet synchronous motor has the characteristics of large power density, complicated operating conditions, narrow installation space, and poor heat dissipation environment. Faults such as rotor eccentricity, permanent magnet loss, phase loss operation, and winding inter-turn short circuit may be more likely occur. 4 Once a fault occurs, it will affect the power, stability, and safety of the vehicle. Serious faults may even threaten the safety of vehicles and personnel, and endanger the lives and property of the people and the public interests.5–7 At present, there is little research on fault diagnosis of permanent magnet synchronous motors for electric vehicles. Therefore, studying the fault mechanism and diagnosis method of permanent magnet synchronous motor under multi-variable conditions and complex environment has important scientific significance and application value for improving the safety, reliability, and economy of electric vehicles.
As a complex machine-electric-magnetic-thermal coupling system, an electric vehicle motor includes a mechanical structure, a circuit structure, a magnetic circuit structure, and an insulation structure. The complex internal operating environment, the small space, and the poor heat dissipation conditions are prone to failure, which causes the overall performance of the electric vehicle to decline. 8 The performance mode of motor fault can be divided into single fault mode and coupled fault mode. A large number of fault types are the biggest problem in the study of permanent magnet synchronous motors.9,10 The faults involve the coupling of multiple physical fields such as stress field, temperature field, flow field, and electromagnetic field. The faults are numerous and varied. Electrical faults in short-circuit or open-circuit windings, mechanical faults in eccentric or bearing damage, permanent magnet demagnetization faults, and coupling faults in which multiple faults affect each other, resulting in a variety of motor faults and coupling characteristics.11–21 Figure 1 illustrates the coupling methods for multi-physics faults. There are many intricate and strong correlations between the internal structures of the motor. Uncertainty factors and uncertainty information are flooding, making faults with random, secondary, concurrency, and propagation properties appear frequently.22–25 In order to adapt to different road conditions, electric vehicles frequently change between driving and braking, idle speed, medium speed and high speed, no-load and load conditions. Therefore, the motor is always in a variety of operating conditions, such as high speed and low speed. They lead to the motor failure and present a variety of fault manifestations.26–30 The data samples collected by the motor fault simulation test bench have certain limitations. First, it is difficult to simulate all fault types and fault levels, resulting in incomplete and inaccurate samples. Single faults such as rotor broken bars, stator short circuits, and static eccentric faults can be accurately simulated on the test bench. However, the coupling fault has uncontrollability and randomness, and the simulation test bench has a large error. Second, it may permanently damage the motor, resulting in high experimental cost. Failure simulation tests are often accompanied by destructiveness and danger, and may even affect the safety of the experimenter and the site. Third, the motor is susceptible to environmental factors such as electromagnetic and temperature, resulting in samples with different degrees of noise.

Motor fault coupling types.
Permanent magnet synchronous motor exhibits very complex dynamic characteristics under the action of electromechanical coupling. During operation, mechanical, electromagnetic, oil film and temperature factors alone or in combination can cause motor failure. They cause changes in the mechanical, electrical, and magnetic parameters of the motor, accompanied by a large amount of fault data.
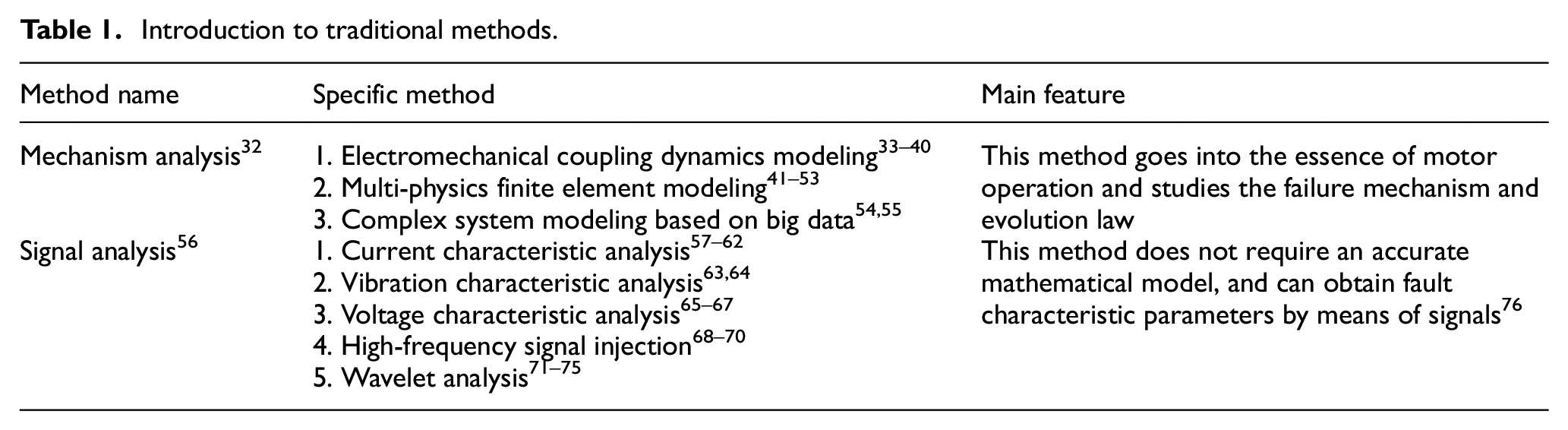
Therefore, it is necessary to consider the coupling relationship between machine, electricity, and magnetism, and establish the electromechanical coupling dynamics model of permanent magnet synchronous motor, multi-physics finite element model or complex system model based on big data. As shown in Table 1, traditional analysis methods include mechanism analysis and signal analysis. Mechanism analysis relies on accurate mathematical models, and the reliability of the diagnostic results is low. Signal analysis has strong dependence on data and poor generalization ability, which does not meet the needs of coupled fault diagnosis. Therefore, traditional fault diagnosis methods are difficult to meet the diagnostic needs of motor-coupled faults. Intelligent fault diagnosis technologies that integrate signal analysis, modeling, and knowledge processing are urgently needed. Intelligent fault diagnosis technology combining signal analysis, modeling, and knowledge processing is urgently needed. 31 In recent years, with the continuous development of computer technology, intelligent diagnostic methods have been favored by researchers and developed rapidly. For fault detection and diagnosis of complex systems, intelligent diagnostic methods have higher accuracy than traditional analysis methods, such as support vector machine (SVM), expert system, neural network, fuzzy logic, and diagnostic methods based on deep learning theory.
Introduction to traditional methods.
Intelligent fault diagnosis
The intelligent diagnosis method uses the artificial knowledge technology such as expert system, fuzzy logic reasoning, and neural network to imitate the human mind judgment process using the accumulated knowledge of fault detection and diagnosis and the knowledge of logical reasoning, realize complex fault monitoring and diagnosis of motors in engineering applications. At present, the more mature intelligent diagnosis methods are SVM, expert system, neural network, fuzzy logic, and deep learning. 77
SVMs
The diagnosis method based on SVM can better solve the problem of small sample and nonlinearity and achieve global optimization. However, most of the model parameters rely on experience selection and require extensive network search. This method has good learning ability and generalization ability. In response to the above problems, many scholars have introduced a variety of optimization algorithms, such as genetic algorithm,78,79 particle swarm algorithm,80–83 quantum particle swarm algorithm,84–86 and drosophila optimization algorithm. 87 Kurek and Osowski 88 proposed two asynchronous motor diagnostic schemes based on SVM: (1) simple diagnosis to detect whether the motor has failed; (2) complex system diagnosis to detect the fault location, and implemented using single-class and two-class SVMs, respectively. Both solutions provide reliable diagnostic information for faults in asynchronous motors. He only used the SVM to realize the selection and classification of current characteristics, but the feature extraction and expression are not realized, and the diagnostic accuracy needs to be improved. However, it has great value for the application of SVM in the field of fault diagnosis. Subsequently, Li and Xue 89 proposed a diagnostic method based on the combination of motor current spectrum analysis (MCSA) and SVM, which successfully extracted the fault characteristics of the stator current, and further improved the accuracy of fault diagnosis and classification. Chen et al. 90 combined principal component analysis (PCA) and SVM in order to study the fault characteristics of rolling bearings. The fault feature dimension was effectively reduced, and the accuracy of fault diagnosis after dimension reduction was still as high as 97%. Compared to back propagation (BP) neural networks, SVM classifiers had higher accuracy and shorter training time. Figure 2 shows the fault classification and diagnosis process.

Classification and diagnosis process of the fault features based on PCA and SVM. 90
SVMs do not require accurate mathematical models, have good nonlinear mapping and good learning ability. However, the model parameters are selected by experience, and the large-scale network search takes a long time.
Expert system
The main components of the expert system are knowledge base, database, inference engine, and human–computer interaction interface. The expert system is applicable to complex systems with incomplete knowledge. 91 Depending on the knowledge base, the diagnostic effect depends on whether the establishment of the expert database is complete. Figure 3 shows the fault diagnosis process based on the expert system.

Expert system fault diagnosis. 91
Berredjem and Benidir 92 introduced a motor bearing fault diagnosis based on fuzzy expert system. Compared with local fault diagnosis, the vibration mode of distributed faults was more complicated, but with the improved interval overlap method, the accuracy could reach 96% in the early fault diagnosis of motor bearings. Expert systems were also widely used in power system fault diagnosis. Ma et al. 93 improved the traditional expert system. It pointed out that the fault diagnosis rate of expert system based on reverse neural network is high, so it was proposed to use multi-neural network algorithm in expert system. Tests based on transformer data sets and high voltage disconnected data sets were performed. The experimental results showed that multi-neural networks could not only achieve online and offline diagnosis, but also provided diagnostic recommendations for later decision-making. Mani and Jerome 94 proposed using fuzzy expert system to analyze dissolved gas analysis (DGA) data in transformer oil to predict transformer failure. Žarković and Stojković 95 proposed a classification and detection method based on transformer fault data. The advantage of this method was that the historical data of the transformer were considered, and the probability of fault detection was improved. The research results had great guiding significance for the decision of the electric power operator.
The expert system is based on the long-term practical experience of the intelligent computer inference diagnosis system to solve the problem of fault diagnosis that is difficult to accurately describe with mathematical models. However, knowledge acquisition is difficult, self-learning ability is weak, knowledge base is difficult to maintain, and the level of intelligence is low.
Neural networks
The most important feature of the neural network-based diagnostic method is the self-learning and self-adaptive ability. It is not necessary to build a database like an expert system, and only a large number of instance training is needed. In Xu et al., 96 the artificial neural network method was used to analyze the power supply imbalance and phase loss of permanent magnet synchronous motor. An artificial neural network was proposed to combine the three-phase stator current and voltage of a permanent magnet synchronous motor. The voltage imbalance ratio under different loads was detected by detecting the ratio of the third harmonic content in the current and voltage fundamentals. In addition to traditional artificial neural networks, many scholars have proposed improved neural network methods, such as BP neural network and self-organizing map (SOM) neural network.97–100 Figure 4 is a schematic diagram of the diagnosis of permanent magnet synchronous motor using SOM neural network proposed by Zhang Niaona of Jilin University. Six frequency bands were selected to extract the fault features, and the noise was removed by normalization to effectively identify the fault. Chen 101 established a BP neural network model with bias unit, trained eight groups of samples, the error of the fourth training was close to zero, which met the real-time diagnosis requirements. Figure 5 shows the training process curve.

PMSM fault diagnosis principle block diagram.
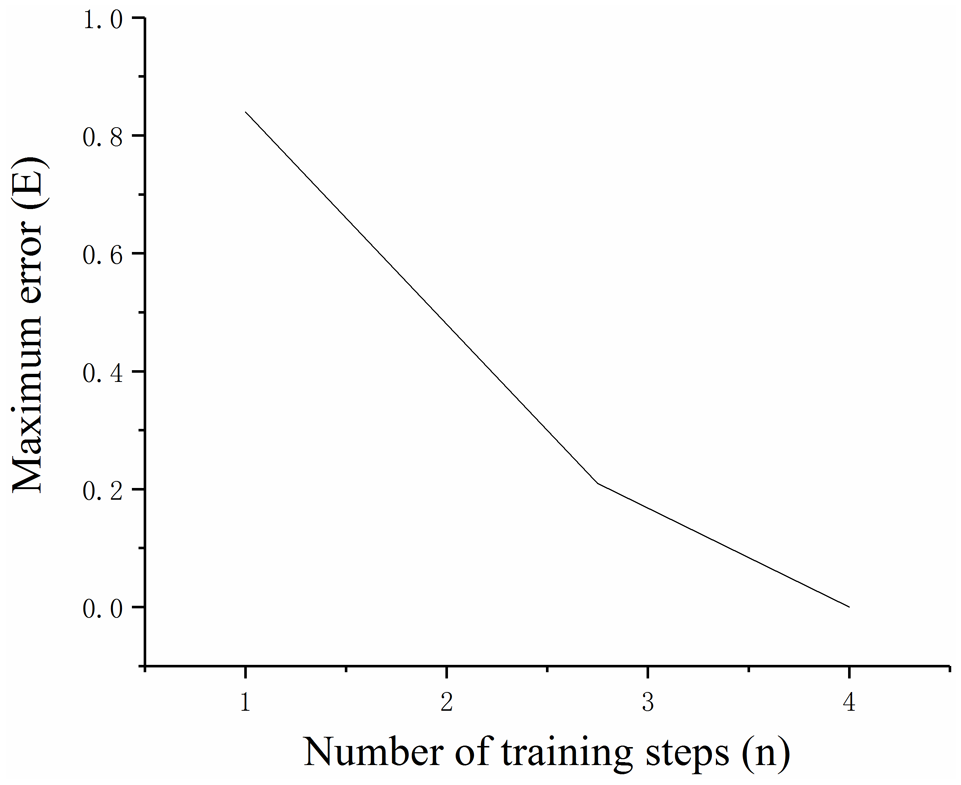
Training error curve. 101
The neural network simulates the human nervous system for information processing and has strong learning ability and adaptability. However, the disadvantage is that a large amount of sample training is required, and the diagnostic ability and generalization performance under high-dimensional big data are insufficient.
Fuzzy logic
The key of the fuzzy logic method is to establish a fuzzy logic system, which has fuzzy components, fuzzy rules, and deblurring units. The advantage is that the law between fault features and faults can be obtained without collecting and processing large amounts of data. Wang et al. 102 showed that the motor was not easy to be detected or determines the fault type at the beginning of the fault, so a logic diagnosis method based on Boolean matrix was proposed. The type of fault at the beginning of the fault was determined by detecting the third harmonic of the voltage and current. Husain 103 proposed a model for the early failure of transformers, which overcame the difficulty of identifying multiple faults in transformers and contributed to preventive maintenance and early diagnosis of power systems.
Fuzzy logic has good flexibility and tolerance for inaccurate data, but the results are affected by fuzzy rules and fuzzy sets. In addition to these common basic diagnostic methods, some researchers have used a combination of multiple diagnostic methods. In Burriel-Valencia et al., 104 the fault diagnosis method of induction motor based on SVM expert system and artificial neural network expert system was studied, and a super system implementation scheme was proposed. Compared to traditional expert systems, this super system was suitable for the instantaneous operation diagnosis of the motor and ensures the automation of the diagnostic process.
Deep learning
In 2006, Hinton first proposed the theory of deep learning, which was a method based on the representation and learning of data in machine learning. Deep neural network (DNN) to simulate the information processing mechanism of the human brain was established to learn, interpret, and analyze the learning input data, and then acquired the ability to interpret the data knowledge. At the same time, according to the characteristics of the input data, the network weight is automatically adjusted and updated, and the ability to extract features or learn new knowledge is improved. 105 The deep learning theory provides a new solution for the field of fault diagnosis, and it also takes a big step to realize the fault diagnosis method based on deep learning. Figure 6 is the basic process of fault diagnosis. However, there are few researches on motor fault diagnosis based on deep learning, especially the fault detection of high-power high-speed motor power, which fails to give full play to the advantages of deep learning. Common deep learning models in mechanical equipment troubleshooting include deep belief network (DBN), convolutional neural network (CNN), stacked auto-encoder (SAE), recurrent neural network (RNN), and generated adversarial network (GAN).

Deep learning based fault diagnosis method flow.
DBN
DBN is a probability generation model. By training the weights between neurons, the whole neural network can generate training data according to the maximum probability. The network component is a restricted Boltzmann machine (RBM). The network structure diagram is shown in Figure 7. The training process uses unsupervised greedy layer-by-layer method to pre-train to obtain weights, which are composed of pre-training and fine-tuning. Multiple RBM networks form the DBN structure to extract the features of the object to be processed, and then classify by classifier. 106 The advantage is that it does not require manual experience to extract data features, and the features of the underlying network automatic refinement are better than manual extraction.
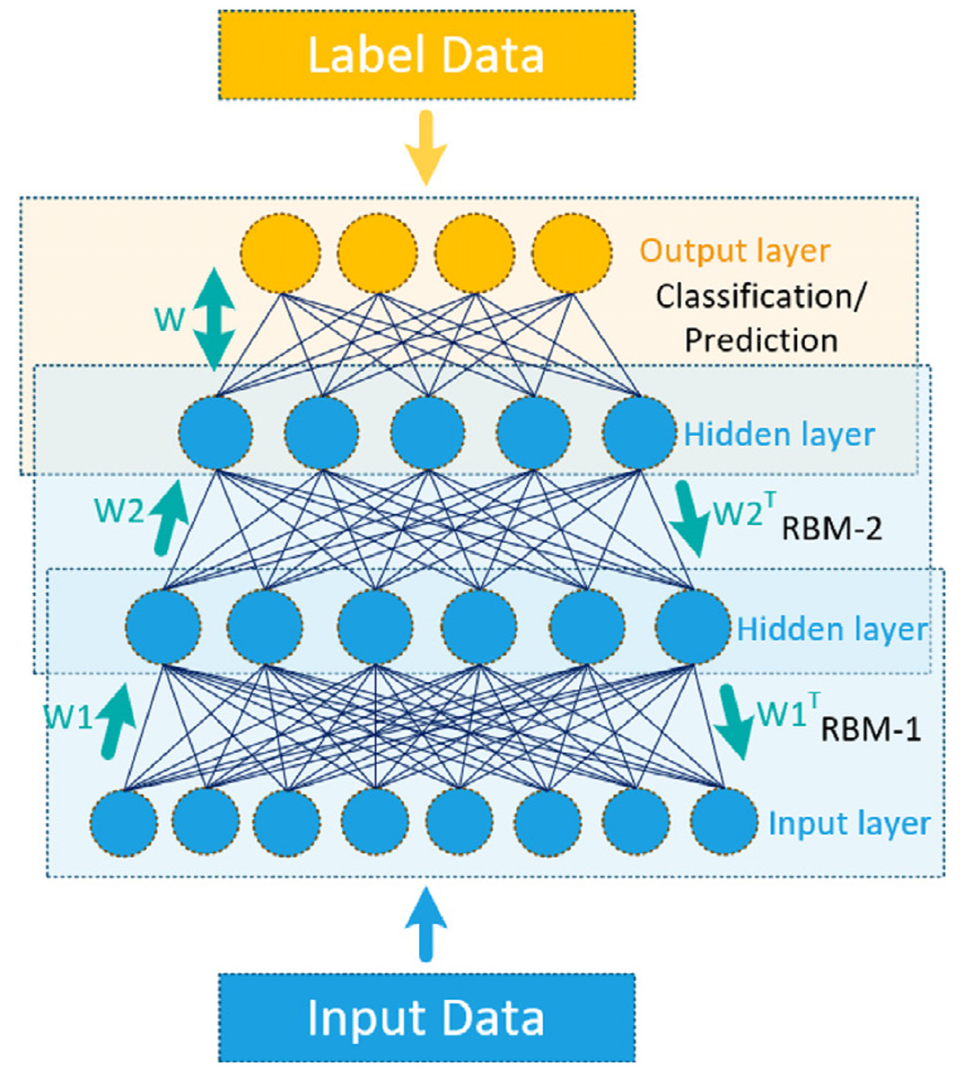
DBN network structure. 98
Wang et al., 107 Zhao et al., 108 Jiang et al., 109 Zhao et al., 110 and Tang et al. 111 used traditional DBN to implement fault diagnosis, but the traditional DBN only considered simple one-dimensional structural information. Experts and scholars have optimized DBN for these shortcomings. Shao et al. 112 proposed a method to improve the deep confidence network for the fault diagnosis of rolling bearings. The optimal structure of DBN was designed by stochastic gradient descent method. The simulation and experimental analysis of the bearing vibration and noise signals were carried out. The deep confidence method has higher robustness and accuracy. Zhu et al. 113 proposed a regression deep confidence network to predict valve leakage faults, and compared with BP neural network, linear support vector regression, polynomial, and radial basis functions. The results showed that the DBN model’s fault prediction accuracy was higher than the traditional prediction model.
CNN
CNN can extract the local features of the input data, and combine the abstraction to generate high-level features layer by layer, which can effectively realize the fault diagnosis and identification of massive data. 114 CNN integrates automatic feature extraction and discriminant classifiers into one model, which is the main difference from traditional machine learning. Patan 115 used CNN to implement fault detection and recognition algorithms without expert experience, and solved the fault diagnosis that was difficult to achieve by two traditional methods of outer ring raceway failure and lubrication performance degradation in rotating machinery. Hu et al. 116 proposed a fault diagnosis method based on empirical mode decomposition and deep CNN for the problem of non-stationary vibration and serious noise pollution. Guo et al., 117 Lu et al., 118 Xiao et al., 119 Xu et al., 120 Janssens et al., 121 and Chen et al. 122 studied the application of CNN in fault diagnosis of bearing and rotating machinery, effectively extracted the fault characteristics, and verified that the proposed model has high precision and rapid diagnosis capability.
SAE
SAE is a very important unsupervised learning method in deep learning. It uses a sparse autoencoding model with unsupervised feature extraction to learn fault features and effectively eliminate the interference items of feature extraction. Coupled with appropriate classification and recognition technology, high-performance fault diagnosis results can be achieved. 123 Second, the method has no periodic requirements for time domain signals, and has strong versatility and adaptability. Finally, it has the functions of processing high-dimensional, nonlinear data, strong noise reduction filtering, feature extraction, and can effectively avoid the occurrence of dimensionality disasters and insufficient diagnostic capabilities. Lei et al. 124 applied stacked denoising autoencoders (SDAEs) to the adaptive extraction and diagnosis of planetary gearbox fault characteristics. Sun et al. 125 used a sparse self-encoding algorithm based on DNN to implement fault classification of asynchronous motors. Jin et al. 126 used the stack denoising automatic encoder to extract the fault characteristics of the planetary gearbox diversity. Figure 8 shows the network architecture.

Stacked denoising automatic encoder (SDAE) network architecture. 126
RNN
RNN is an artificial neural network with tree-like hierarchical structure and network nodes recursive input information according to their connection order. It fully considers the relationship between samples and is suitable for real-time fault diagnosis of complex equipment.127,128 The RNN can form two different RNNs, Jordan and Elman, according to different feedback paths, 129 as shown in Figure 9.
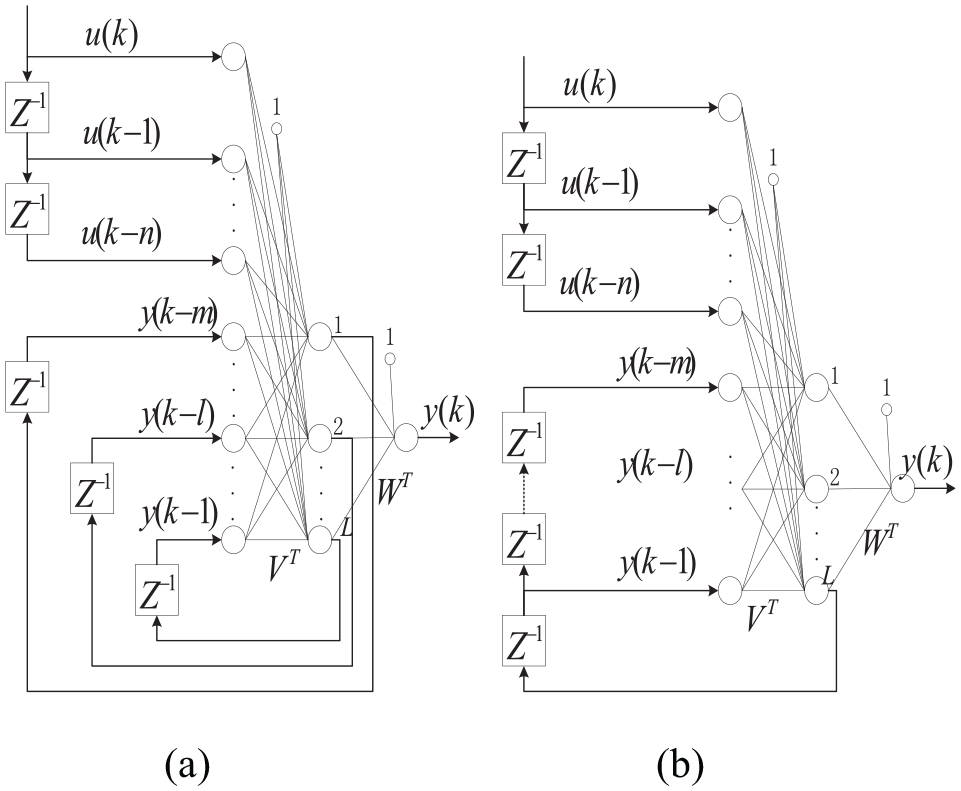
Jordan and Elman double-layer recurrent neural network RNN architecture 129 : (a) Jordan; (b) Elman.
Przystałka and Moczulski 130 used local RNN to learn the chaotic behavior of chaotic engineering systems, and realized the robustness of system fault detection. Lin et al. 131 constructed a recursive fuzzy neural network model and realized the fault-tolerant control of the position servo drive of the sixth-order permanent magnet synchronous motor.
GAN
GAN is a deep learning model with unsupervised learning on complex distribution. It generates high-quality samples with unique zero-sum game and confrontation training ideas to make up for the shortcomings of training data. It has more powerful features and learning and characterization than traditional machine learning algorithms.132,133
Wang et al. 134 proposed a GAN-based measurement missing value reconstruction method. The use of authenticity constraints and context similarity constraints to optimize hidden variables made the trained generator completely dependent on data driven, and did not involve explicit modeling steps. High-precision reconstruction data could be generated in the absence of a large number of measurements. The basic structure of GAN is shown in Figure 10. Liu et al. 135 used GAN to train image data, expand the training set, and generated comprehensive sample data. Deep learning was implemented using DNN as a classifier. Figure 11 shows the training classification process. Rozsa et al. 136 proposed a way to generate sample images against strong samples with strong structural effects. The training data set was expanded by expanding the positive example of the additional difficult classification of the sample image. The accuracy of individual training against samples was further improved.

Basic structure of GAN. 134

Workflow of the small sample size multi-classification approach. 135
In order to solve the fault data generated in the machine operation, Shao et al. 137 first proposed the method of using the auxiliary classifier to generate the anti-network (ACGAN), using the category label as an auxiliary tool to train the data, and generate the data with the label to achieve the data enhancement effect. The vibration signal of the induction motor was taken as experimental data to verify the proposed model. The results showed that ACGAN could generate a large amount of reliable data. Figure 12 shows the specific flow of ACGAN data enhancement. Lee et al. 138 studied two data sampling methods for common faults of induction motors: standard oversampling method and GAN-based oversampling method. The experimental results showed that the GAN-based oversampling method is better for the problem of unbalanced fault data and normal data. Similarly, Li et al. 139 proposed an enhanced generation-based confrontation network (EGAN), and generated models to automatically enhance small samples to balance faults with normal data. An adaptive training strategy was proposed to optimize the convergence speed and stability of the network. The accuracy of the model was verified using two data sets.

Data augmentation strategy using ACGAN for fault diagnosis task. 137
Intelligent fault diagnosis based on deep learning has strong versatility and adaptability. With the ability to process high-dimensional, nonlinear data, it can effectively implement fault diagnosis and identification of massive data. The robustness and accuracy of fault diagnosis are greatly improved.
Conclusion
A relatively complete theoretical system has been formed in the areas of intelligent sensing and signal acquisition, signal analysis and data processing, intelligent decision-making, and fault diagnosis of permanent magnet synchronous motors at home and abroad. It provides a theoretical basis for the fault diagnosis and health management of electric motors in various operating conditions and electric fields of electric vehicles. However, the following problems still need to be further studied:
Motor faults exhibit randomness, emergence, concurrency, transmission, and weakness. The physical characteristics of the motor under coupling failure are much more complicated than the physical characteristics of a single fault. It is difficult to establish a single physics field and a single fault diagnosis model to study the coupling mechanism and diagnosis method of the motor system.
Motor faults are sporadic, and the data collected by online monitoring equipment is characterized by non-stationary, nonlinear, multi-source heterogeneity, and low-density values. At the same time, setting up the test platform to collect data samples has certain limitations. It is difficult to simulate all fault types and fault levels.
GAN generates high-quality samples with unique zero-sum game and confrontational training ideas to compensate for the lack of training data, powerful feature learning, and feature expression capabilities and some research results have been achieved in the repair of data such as images, water conservancy, and power grids. Therefore, GAN is used to expand the fault data samples collected by the motor fault diagnosis test platform, expand the sample size and type of the data set, and create a pseudo data structure easy to train and adaptively coordinate multi-source fault samples.
Deep learning fault diagnosis method is processed through effective feature extraction, selection, and classification, which has flexible diagnosis strategy and high diagnostic accuracy. However, it is difficult to balance the real-time, rapidity, and accuracy of motor fault diagnosis with only one intelligent diagnosis method. It is recommended to fully consider the correlation between samples. Organic fusion and comprehensive application of multiple deep learning methods are adopted to overcome the limitations of various diagnostic methods. The deficiency of insufficient deep network training is remedied. Reliance on a large number of signal processing techniques and diagnostic experience is eliminated to realize adaptive extraction of fault characteristics and intelligent diagnosis of health status of permanent magnet synchronous motors.
Footnotes
Acknowledgements
The authors would like to thank the images copyright holders for allowing the use of the images in this article.
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grants 51975426 and 51505345, and the Wuhan Science and Technology Project under Grant 2019010701011393.