
Abstract
Because of deterioration of strength, range of joint motion, and balance ability, most care-dependent older adults require assistance to move from a seated position to a standing position. Although many sit-to-stand assisting apparatuses consisting of a seat, power transmission mechanism, and sensors have been developed, most of movements depend several actuators as the power transmission mechanism. This study aims to develop the chair-typed apparatus of nine-link mechanism with 1 degree of freedom at first, then to prove the possibility that the apparatus can be operated through the recognition of human behavior by one sensor. Here, the nine-link mechanism is divided into two mechanisms: the five link for raising the height; the four link for rotating. The mechanical part enables two input links for two mechanisms to be driven by one linear actuator simultaneously. The measurement with the infrared sensor enables the assistive apparatus to be operated automatically while patterns from measured data help the apparatus recognize what the user want to do: one is the sit-to-stand movement; the other is the stand-to-sit movement. It is discussed that the operating method through the human behavior is helpful for most older adults who are not familiar with the operation of machine.
Keywords
Introduction
People frequently engage in sit-to-stand (SiSt) and stand-to-sit (StSi) movements as they change from a sitting position to a standing position and vice versa. The ability to perform the SiSt and StSi movements is thus an important skill; in care-dependent older adults, the inability to perform this basic skill can lead to institutionalization and impaired functioning and mobility in activities of daily living (ADL). Changes in the ability to perform the SiSt and StSi movements are found in care-dependent older adults and people with disabling diseases and are largely related to the determinants of the SiSt and StSi movements. In the Health Assessment Questionnaire, a survey of independently living Dutch men and women aged 55 years and older, 25% of the men reported moderate disability and 5% of the men reported severe disability with regard to the ability to rise. 1 The index of ADL is an important representation used to evaluate people’s quality of life (QOL). Among all daily activities related to ADL, the SiSt and StSi movements have been identified as the most difficult and mechanically demanding; furthermore, it has been proved that almost everyone performs the SiSt and StSi at least 45 times per a day. 2 However, the ability to perform this basic skill gradually decreases because of muscle strength deterioration, allowable range of joint mobility, and a sense of balance.3,4 Furthermore, with the growing population of those over 60, there is an urgent need for the development of assisting apparatuses.5–7
Various types of assisting apparatuses have been developed: the powered exoskeleton, the wearable robotic suit Hybrid Assistive Limb (HAL) from Cyberdyne, Japan, 8 the powered lower limb exoskeleton such as Ekso from Ekso Bionics, Germany, 9 the Indego from Exoskeleton Report LLC, USA, 10 the ReWalk for the rehabilitation from ReWalk Robotics Inc., USA, 11 the passive gravity-balancing knee-ankle-foot orthosis, 12 and the standing-style locomotion system. 13 However, it is considered that these exoskeletons have many limitations and design insufficiencies in terms of StSi and SiSt movements, 14 although direct comparison of both exoskeleton-typed apparatus and human postures is not proper. These involve both hardware limitations, such as an adequate power supply, materials for skeleton structure, actuators, joint flexibility, power control, modulation, and so on and operation limitations, such as detection of unsafe or invalid motions, adaptation to user size variations, joint pinch hazards, and so on. Especially regarding the latter, challenges in safety and operation especially deter the exoskeleton’s practical use in assisting older adults with weakened lower limbs in daily locomotion. 15 In addition, most of the apparatuses mentioned above were designed specifically for rehabilitation training; they can assist patients in performing the SiSt or StSi movements well; however, it is considered that the next human behavior immediately after the SiSt or StSi movement is often limited, for example, taking down one’s pants for toilet, and so on. Thus, although supporting the SiSt and StSi movements is integral because of these movements’ function as a precursor to most other movements in daily life, the necessary human behavior immediately after the basic SiSt and StSi tasks should not be ignored.
It is important to consider the primary impetus of changes in the frequency of use of technology by older, care-dependent, independently living adults. Technology acceptance is influenced by many factors 16 ; these factors can be divided into six keywords: concerns regarding technology (e.g. high cost, privacy implications, and usability factors); expected benefits of technology (e.g. increased safety and perceived usefulness); need for technology (e.g. perceived need and subjective health status); alternatives to technology (e.g. help by family or spouse); social influence (e.g. influence of family, friends, and professional caregivers); and characteristics of older adults (e.g. desire to age in place). Given these contributing factors to technology acceptance and the familiarity with which older adults can use a chair, the chair-typed apparatus is considered better suited to assisting care-dependent older adults than the power exoskeleton.
Several chair-typed apparatuses or their components have been developed: the control method of the apparatus for the SiSt and StSi transfers, devices for assisting the stand-up motion for rehabilitation, and the assistive device for the SiSt transfer based on passive gravity compensation.17–27 Some upright wheeled chairs and mobility aids have also been developed, such as LEVO from Switzerland, 23 UPnRIDE from Israel, 24 and TekRMD from Matia Robotics, USA. 25 These kinds of chair-typed apparatuses 26 consist of multiple actuators, a power transmission mechanism or mechanical structure, and some sensors. We suppose that most of these apparatuses pay little attention to the design of the power transmission mechanism, and instead solely rely on the number of actuators to drive the apparatus. However, a proper designed power transmission mechanism may be able to amplify the output torque, reduce the number of actuators, and thus increase the potential for the technology’s acceptance. Generally, for an assisting SiSt/StSi apparatus with some degree of freedom (DOF), the power transmission mechanism is used to transfer the input driving power source to the end-effector. The role of such a transmission mechanism is passive and limited in its ability to achieve the final goal for the seat’s posture. A nine-link mechanism used as the power transmission mechanism may reduce the number of actuators needed to achieve the final seat posture; the unique linkage mechanism is then connected to the improvement of stability and cost for the entire apparatus.
Therefore, this study aims to develop the chair-typed assistive apparatus of nine-link mechanism as the power transmission mechanism with 1 DOF, then to prove the possibility that the apparatus can be operated automatically through the recognition of human behavior by one sensor. This study is to propose the designed mechanical part, to design the chair-typed assistive apparatus of nine-link mechanism with 1 DOF, and to propose the operating method while recognizing the human behavior through one sensor feedback.
Consideration of mechanism and DOF
Determinants of SiSt movement
It is very necessary to know what kinds of design parameters are important before the chair-typed apparatus starts to be developed at the first step. Through the review,27–29 it has been well-known that the height of the chair seat, the use of armrests, and foot positioning have a major influence on SiSt and StSi movement performance.
A higher chair seat results in lower moments at hip and knee level (up to 60% and 50%, respectively).27,28 Lowering the chair seat will increase the need for generation of momentum or repositioning of the feet to lower the moments needed. Comparison of the results of the studies is difficult because of differences in study design and the fact that the height of chair seat is not always based on lower-extremity length. Using armrests will lower the moments needed at the knee by 50%, probably without influencing the range of motion of the joints. 29 Repositioning of feet appears to influence the SiSt movement strategy, enabling lower peak moments at the hip and knee.27–29 No experimental study was found that addressed the influence of the use of a backrest.
Consideration of necessary DOF
Figure 1 shows considerations of the necessary DOF for the chair-typed apparatus. Figure 1(a) represents the case in which there is 1 DOF, which involves changing the height of the seat with opened-loop mechanism. Although, in general 1 DOF may be sufficient, the customizable seat height afforded by 1 DOF may not be suitable for care-dependent older adults. In addition, it is unknown whether, for older adults, there is serious interference between the rear side of lower limbs and the edges of seat during the SiSt movement or not. In the worst case, care-dependent older adults must face the danger of falling while sitting on the seat during the StSi movement, as the interference of the rear side of lower limbs and the edge of seat involved a high possibility of falling.

Consideration of the necessary degree of freedom (DOF) for the chair-typed apparatus: (a) an apparatus of opened-loop mechanism with 1 DOF; (b) an apparatus of opened-loop mechanism with 2 or 3 DOFs; and (c) an apparatus of closed-loop mechanism with 1 DOF.
Alternatively, Figure 1(b) represents the case in which there are 2 or 3 DOFs; these involve changes to the height of seat as well as to the horizontal shift or rotation with opened-loop mechanism. Here, rotation of the seat is assumed to lead to foot repositioning because hip sliding is needed in order for the person to be supported by their feet, and the height of seat is directly related to the height of chair. Thus, it is expected that 2 or 3 DOFs are enough to satisfy two: the height of the chair and foot positioning.27,28 However, it is necessary to have many DOFs when the apparatus with opened-loop mechanism is considered.
Figure 1(c) represents the case of closed-loop mechanism. Although the closed-loop mechanism has a difficulty in designing because of the consideration of power transmission structure including the length and placement of links, this mechanism is useful for reducing the number of actuators. The proper design of structure enables us to utilize the closed-loop mechanism to develop the chair-typed apparatus. The concept design shows nine-link mechanisms with 1 DOF.
Design of chair-typed assistive apparatus
Inverse kinematics
The two-dimensional computer-aided design (CAD) drawing in Figure 2 shows the placement of nine-link mechanism (which is divided into three-link mechanism actually; five-link mechanism 1, four-link mechanism 1 and 2) as well as the definitions of the design parameters for each link mechanisms constituting the power transmission mechanism.

Two-dimensional computer-aided design (CAD) as the power transmission structure: (a) drawing and placement of one five-link mechanism and two four-link mechanism 1 and 2 in the apparatus; (b) parameter definitions for four-link mechanism 1.
The posture of seat can be decided by two red-colored and blue-colored points of
Four-link mechanism 1
Figure 2(b) shows a definition of parameters for the each link mechanism. The top is for four-link mechanism 1. It is necessary to get the relation between


where
In

where
The output of four-link mechanism 1 is related to two inputs of four-link mechanism 2 and four-link mechanism 1. Two input vectors of
Four-link mechanism 2
It is necessary to get the relation between the point of


Parameter definitions for four-link mechanism 2 and five-link mechanism 1.
The projections of


In order to find two generalized coordinates



The obtained equation (9) allows one to calculate the values of

In order to determine coordinates, it is necessary to get equations (7) and (8) in the expanded form and to transform them to receive


Substituting


Similarly, we can determine the location of the kinematic chain. We present radius vector of the point

As in the previous case,

Likewise, we obtain the following formulas for calculating

As a result, the vector of
Five-link mechanism 1
It is necessary to get the relation between the point
For this, the radius vector of the point

The projections of


where
In order to find two generalized coordinates



Obtained equation (24) allows one to calculate the values of

In order to determine coordinate, it is necessary to write equations (21) and (22) in the expanded form and to transform them to receive

Similarly, we can determine the location of the kinematic chain. We present radius vector of the point

As in the previous case,

Likewise, we obtain the following formulas for calculating

As a result, the vector of
Mechanical design
Driving part
Figure 4 shows the movement of linear actuator and the mechanical design used to drive the apparatus: (a) indicates the initial condition; (b) indicates the final condition of red-colored linear actuator. To simplify the mechanical design, instead of using a geared motor to drive the movement from the initial to the final condition, a red-colored linear actuator is applied to drive the apparatus. By comparing the two different conditions, it was possible to determine the movement of linear actuator. A cylinder part is used to indicate the linear actuator. The actuator is settled on the fixed base frame with a range of movement of 0–100 mm.
Movement of linear actuator (the half-white cylinder) designed to drive the apparatus and the mechanical connection (
Figure 5 shows the mechanical design to connect the driving part to the two input links: (a) design to transfer driving power source to the two input links of

Mechanical design to connect the driving part to the two input links (
To avoid interference between the input link of five-link mechanism 1 and other mechanical parts during motion, the sickle-shaped mechanical part is adopted. The sickle-shaped mechanical part enables the driving power of the output link of green lines (as shown in Figure 4(b)) to be transmitted to two input links of
The angle between two points
During CAD design, the length of all links structures is decided through a simulation in ADAMS (a computer-aided engineering (CAE) software which assists engineers in studying the dynamics of multi-moving parts and how loads and forces are distributed throughout mechanical systems)33,34; design errors due to graphical and analytical methods can be eliminated through simulations in ADAMS, thus allowing better results.
Raising part
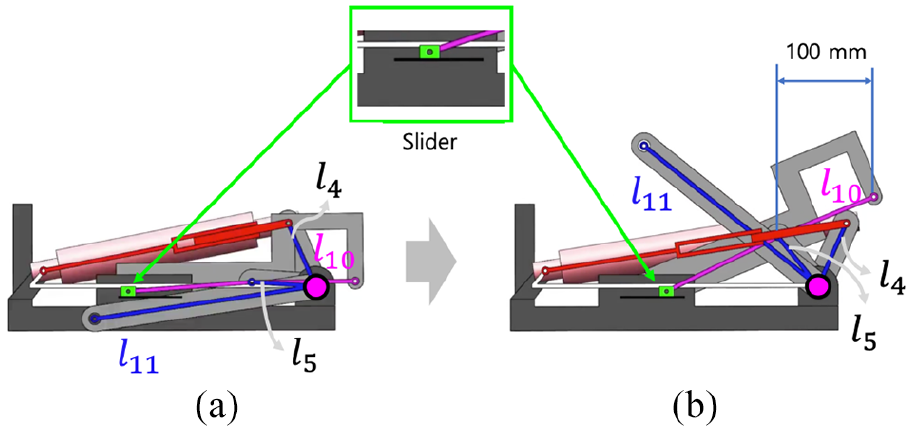
Figure 6 shows the inter-related movement of the mechanical part used to raise the five-link mechanism 1, where light red lines indicate the initial condition and bold red lines indicate the final condition. There are two challenges to overcome: the interference with other mechanical parts needs to be avoided during performance; then, the motion of the linear actuator needs to be transmitted to two different input links of

Inter-related movement of the mechanical part used to raise the five-link mechanism 1, where (a) light red lines indicate a parts initial condition and (b) bold red its final condition.
Because the rotating motion of the sickle-shaped mechanical part is not driven around the pink-colored fixed center point in Figure 7, the height of five-link mechanism 1 is expected to be much higher than that under the fixed-center-point condition. Thus, the length of

Inter-related movement of the mechanical part used to rotate the four-link mechanism 2, where (a) light blue lines indicate a parts initial condition and (b) bold blue its final condition.
Here, it should be considered whether there is any contact between the apparatus and lower limbs of human body or not when the apparatus supports some users. Because the interference between the five-link mechanism 1 and lower limbs during the SiSt movement results in the serious danger or incident. In this study, the length of
Rotating part
Figure 7 shows the movement of four-link mechanism 2: light blue lines represent the initial condition and bold blue lines represent the final condition. With the movement of the linear actuator as shown in Figure 4, the input link of
Figure 8 shows the exploded assembly diagram. It is easy to understand the entire assembly view. The proposed nine-link mechanism combining five-link mechanism 1 with four-link mechanism 2 enables the developed apparatus to be driven with 1 DOF.

Exploded assembly diagram.
Results of design of nine-link mechanism with 1 DOF
Figure 9 shows the design-to-prototype chair-typed apparatus development and its functionality with a human subject. Figure 9(a) shows three-dimensional (3D) rendering of CAD drawing of the apparatus and side view of the developed apparatus. The base frame, made of the aluminum, is included to fix the driving mechanical part. The total size of prototype is (width × height × depth = 620 × 405 × 540) mm.

Design-to-prototype chair-typed apparatus development and its functionality with a human subject: (a) 3D rendering of computer-aided design (CAD) drawing of the apparatus and side view of the developed apparatus; (b) five states of the performance of the apparatus; and (c) relation between the height and angle of the seat.
Figure 9(b) shows the performance of the developed prototype apparatus. The total weight was 45 kg; however, for improved portability, it is possible to decrease the body weight in the next prototype after the optimized mechanical design process.
Figure 9(c) shows the results of the relationship between the height and angle of center of mass (COM) for the seat. The high-speed camera 35 (VW-9000 High-speed Camera from KEYENCE Corporation) was used for the measurement, and then measured data were compared with simulated data. This camera system is capable of both macro- and micro-level observation, which has a built-in digital display, can record videos at speed of up to 230,000 frame per second (fps), and the fps for this study was set to 125.
It was confirmed that the movement for the vertical translation motion was 125.0 mm and the rotation motion 55.0°, which results from the combined relationship between the input and output linkages. The vertical movement is considered by most of Japanese elderly heights. 36 The average ± standard deviation (SD) of height for Japanese elderly people (60–80 years old) is (167.2 ± 1.061) cm for male and (153.6 ± 1.344) cm for female. The average ± SD of body weight is (66.7 ± 0.917) kg for male and (54.0 ± 0.778) kg for female. But, adjustment of the height and angle was possible with adjustments to the length of linkages. The sequence used to raise the seat to the vertical translation direction and the sequence to rotate the seat were conducted simultaneously.
Experimental evaluation
Experimental system
Figure 10 shows an overview of experimental system and environment. A description of experimental system is shown in Figure 10(a). This system is an Up and Down movable chair system to be consisted of nine-link mechanism. As I mentioned, the one linear actuator is used to drive the Up and Down movement of apparatus. The one distance sensor to identify user behavior is used. The sensor for distance measurement is the position sensitive detector (PSD) that distance measurement sensor of the infrared (IR) type. 37

Experimental condition: (a) A description of experimental system; (b) an overview description of experimental environment.
The sensor is mounted 45° from the lower horizontal plane of the seat backrest as shown in Figure 10(a) and measures the seat back and distance from the user in real time. The distance information performs the measurement, and the changing rates of the distance information are the major factors for recognizing the human behavior. The proposed concept is similar to the automatic faucet when you wash your hands at the restroom. When your hands approach the closer faucet, you have some water to wash your hands because of the attached sensor. If there is no approaching hand, the sensor is not working; thus, you could not have some water from the faucet. Similarly, when there is no user ahead, the maximum of measurement distance from the backrest to the obstacle assumed with the toilet door is 1 m. When the user is approaching, the measured distance is changed, then the apparatus can recognize the user’s behavior through the changing rate of measurement.
The measured sensor data are converted to dimensionless values from 0 to 255 through the analog-to-digital (A/D) converting. Sampling rate is 100 ms, and the applied controller is an 8-bit Arduino board. Of course, the sampling rate is changeable according to the speed of human behavior.
Algorithm
Experimental scenario
In order for the developed apparatus to be applied for assisting the toilet, it is necessary to confirm the feasibility. The following scenario represents the experimental scenario. When a human subject enters the toilet, measured data are going to be suddenly changed because the distance between PSD sensor and the human subject is changed. Then, the apparatus is moved automatically when the human subject is ready for sitting on the seat. Finally, when the human subject bends forward one’s trunk for standing up, the distance is changed; thus, the apparatus is moved automatically.
Flow chart
Figure 11 shows a flowchart for the explanation of algorithm in order to confirm the feasibility of experimental scenario. The phase for human behavior is defined by three phases: the phase 1 is that user enters the toilet and the user is in front of the toilet seat; the phase 2 is that the user starts to sit on the seat; and the phase 3 is that the user leaves the toilet after standing up the seat.

A flowchart for the explanation of algorithm.
Three patterned human behaviors can be determined through the measured sensing data from 0 to 255. For phase 1, the range of measured data is
Results
Results of recognition for human behaviors
Figure 12 shows the experimental results. The horizontal axis represents the time, and the vertical axis represents the value of PSD sensor. The red plot indicates the mean, and the gray plot indicates the SD for total 10 times.

Experimental results.
For phase 1, when a human subject enters the toilet, the distance between the PSD sensor and the door of toilet is suddenly changed from
Results of measured muscle activity
Figure 13 shows the results of measured muscle activity during the SiSt movement through electromyography (EMG) 38 with and without assistance of the apparatus: (a) represents the description of measuring points; (b) and (c) represent the results of measured EMG under the condition of assistance or not, respectively. The initial height of the chair was 43 cm; at this height, it is reported that all healthy human subjects felt inconvenience during the SiSt movement. After measuring raw signal data, the root mean square (RMS) signal processing was applied. An alternative way to capture the EMG envelope is to compute the RMS value of the signal within a small window. The red-colored line indicates the average and the light red-colored area indicates the SD for total measurement.
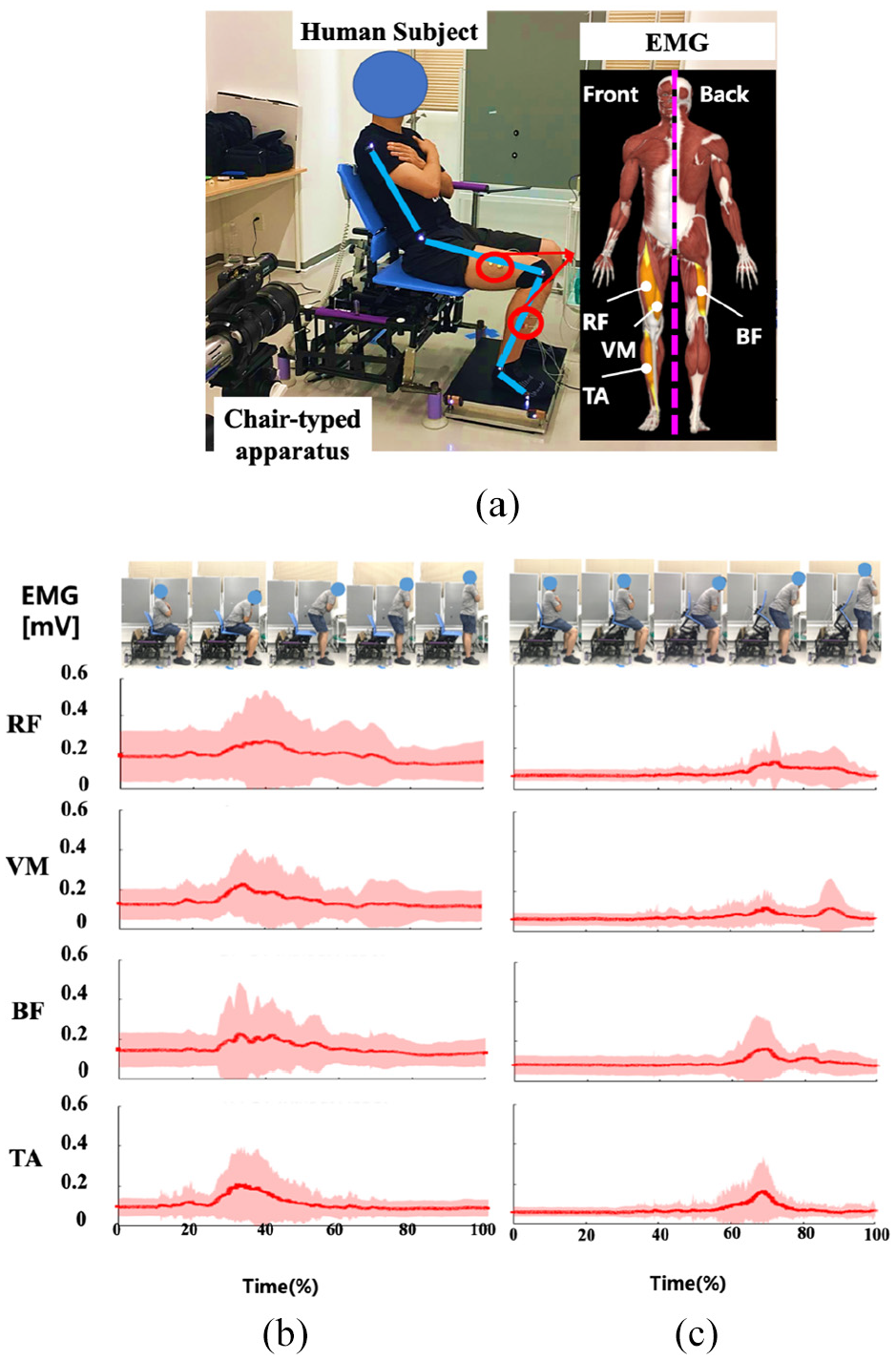
Results of measured muscle activity of the rectus femoris (RF), vastus medialis (VM), tibialis anterior (TA), and biceps femoris (BF) through electromyography (EMG): (a) a description of measuring points; (b) result of sit-to-stand (SiSt) EMG without the use of an apparatus; and (c) result of SiSt EMG with the assistance of an apparatus.
Ten human subjects were participated, including five males and five females. No subject reported a major back or lower limb pathological condition, medication use, or a history of neurological disease that might influence supine and lateral posture. No major difference in body mass index (BMI) was observed between the human subjects. The mean ± SD of the subject’s age and BMI was 24.9 ± 3.6 years old and 22.5 ± 3.0 kg/m2, respectively. All experiments were conducted by voluntary participation. The experimental procedures were performed in accordance with the Declaration of Helsinki and approved by the Ethics Committee of the Clinical Trial Center, Department of Medical Innovation, Osaka University Hospital (no. 305, 21 August 2014). Informed consent was obtained from all human subjects, all of whom were adults.
According to the results of measurement, it was proven that the proposed apparatus enabled all human subjects to reduce the burden of muscle activity during the SiSt movement. Compared to the maximum amplitude at the measuring point of rectus femoris (RF) under the condition of assistance, the muscle activity lessened 76%. At the measuring points of vastus medialis (VM), biceps femoris (BF), and tibialis anterior (TA) under the condition of assistance, muscle activity was lessened to 171%, 41%, and 48%, respectively. Accordingly, it is considered that the apparatus helps older adults with weaker muscle strength of lower limbs perform the SiSt movement. Furthermore, there was no need to move the trunk to achieve the inertial effect during SiSt movement, as the proposed apparatus led to the final condition of the SiSt movement as shown in Figure 13.
As a result, through explanation of the proposed design, development of a prototype, and results of EMG-measured muscle activity analysis, it is verified that the chair-typed apparatus of nine-link mechanisms with 1 DOF enables most of care-dependent independently living older adults to be useful for SiSt movement.
Discussion
In a rapidly aging society, solutions are needed to both alleviate the burden on healthcare and provide solutions to healthcare challenges. Because of assisting apparatus’ reliability, consistency, and accuracy, they may be able to alleviate common burdens associated with daily life activities. However, there has been little research that investigates the applications of such healthcare apparatuses for practical use while also focusing on qualitative evaluations of them. To fill this gap, the authors sought to explore this field by investigating human performance and technology acceptance in the design of a health care apparatus.
In one previous study, wherein a healthcare robot’s inability to know if its service satisfies the user or not was addressed, an approach to informing a nursing care robot of the patient’s psychological change was developed 6 ; this approach was based on the determination of vertical ground reaction forces. The results of the study indicate that the developed classifier had the ability to discriminate some faults classes from others. In other previous studies, the SiSt performance was evaluated by the collaboration between movements of the trunk and lower limbs with the relative phase (RP). 7 The results indicate that evaluating SiSt movements through the RP is an effective method of evaluating the service quality of robots and the collaboration between movements of the trunk and lower limbs; features extracted from RP theory could distinguish classes of movements with a high probability. Nevertheless, the self-reliance support robot developed by PANASONIC Co., Ltd in Japan has yet to be widely and practically used.
Thus, a new design of the SiSt chair-typed apparatus with nine-link mechanisms was proposed herein. This design is intended for practical use in elderly residential facilities. Application of the linkage mechanism to the assisting apparatus reduces the number of actuators needed, which reduces the cost of the SiSt assisting apparatus. In addition, the apparatus’ likeness to a chair makes it a familiar piece of equipment, which is likely to contribute to a relatively high technology acceptance in its practical use. The results of prototype testing sufficiently verified the feasibility of the proposed design. In the future, further trial and error and augmented version of the original design could result from feedback from the apparatus’ practical use in elderly residential facilities.
Supplemental Material
Certificate_of_editing-TYJDD_1_2 – Supplemental material for Operation of assistive apparatus through recognition of human behavior: Development and experimental evaluation of chair-typed assistive apparatus of nine-link mechanism with 1 degree of freedom
Supplemental material, Certificate_of_editing-TYJDD_1_2 for Operation of assistive apparatus through recognition of human behavior: Development and experimental evaluation of chair-typed assistive apparatus of nine-link mechanism with 1 degree of freedom by Myoungjae Jun, Hieyong Jeong and Yuko Ohno in Advances in Mechanical Engineering
Footnotes
Acknowledgements
The authors wish to thank the industrial partners involved with MIHAMA Co., Ltd. (Higashi Hiroshima, Hiroshima Prefecture 7390269, Japan), who helped us find this avenue of research. Then, the authors would like to thank the administrative support of Chonnam National University. And finally, the authors give the special big thank to Mr Guo at Osaka University in Japan, who helps me get the great results.
Handling Editor: James Baldwin
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the International Joint Laboratory—Type A in Osaka University.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.