
Abstract
In comparison with constant torque brakes, constant deceleration brakes are more advantageous for the safety of mining hoists, but complete set of such products manufactured by big companies are not what ordinary mining enterprises can afford. As an alternative solution, this article develops a constant deceleration compensation device, which adds the function of constant deceleration brake onto the original brakes. Control strategy based on Fuzzy Neural Network PID is investigated and simulated with the combination of AMEsim and Simulink. An actual device is built and tested in real industrial field. The application illustrates the feasibility of this constant deceleration compensation device, which can achieve constant decelerations within a very short time. This device will prevent dangerous decelerations from happening to hoists at a much lower cost, and greatly improve the safety and reliability of mining hoists.
Introduction
A mine hoist is the key transportation equipment connecting the ground and underground facilities during mine production. The brake system is the critical device to ensure the safe operation of a hoist, especially when an emergency occurs, 1 it can timely and effectively stop the hoist and avoid further expansion of the accident. With the increase in coal mining depth, there are now much higher requirements for hoisting speed, load, and distance, which brings more challenge to the brake system.
Traditionally, in case of emergency, a mining hoist utilizes two-stage constant torque brake which generates different decelerations while hoisting load or other working condition changes. Inappropriate deceleration might cause danger to a hoist such as over-wind or rope slip.2,3 In comparison with constant torque brakes, constant deceleration brakes apply changing brake torque on hoists to achieve constant brake deceleration. A lot of scholars have put effort into the research at this point. Gui et al. 4 built a mathematical model of a constant deceleration brake system, in which a fuzzy controller was utilized, but the fuzzy rules were based on priori knowledge and consequently impacted by subjective factors to some extent. Liu et al. 5 investigated the application of Fuzzy Wavelet Neural Network on a constant deceleration brake system and achieved a better adaptive capacity. Some big companies, such as ABB and SIMAG, have already been providing mature constant deceleration brakes to users for years. Those applied devices reduce hoisting danger significantly and show their superior braking performance.
However, not all mining companies can afford such expensive products by those big business. Most small- and medium-sized mines are still using traditional brakes facing the high intrinsic risk they bring to hoisting systems. Is there any alternative way to change the current situation, namely, to prompt the use of constant deceleration brake without paying the huge cost of those high-price products? This is just what this article focuses on, an constant deceleration compensation device is devised, whose aim is to add constant deceleration function to the previous constant torque brake at a much lower cost.
Hydraulic system of the constant deceleration compensation device
Most brakes of mining hoists are driven by hydraulic system. As shown in Figure 1, on the basis of the previous hydraulic station, a new part of constant deceleration compensation has been added. Components within the dotted box are used to realize the original function of constant torque brake. High-pressure oil goes from the pump to open the disk brakes through pipe A and B. During emergency brake, oil goes back to the tank from disk brakes, and its pressure drops to residual pressure which approaches 0 MPa. The disk spring force is then applied upon the brake plate to produce the brake torque. Because brakes of group A and B act asynchronously, two torques can be obtained to achieve two-stage brake and avoid excessive deceleration, which is currently widely adopted in mining field.

Schematic diagram of the hydraulic system of the constant deceleration compensation.
Outside the dotted box, the components that include accumulators, directional valves, electro-hydraulic proportional relief valves, pressure gauges are utilized to provide the constant deceleration function onto the original hydraulic station. Some key parameters of this transformed hydraulic station are listed in Table 1.
Main technical parameters of the hydraulic brake.
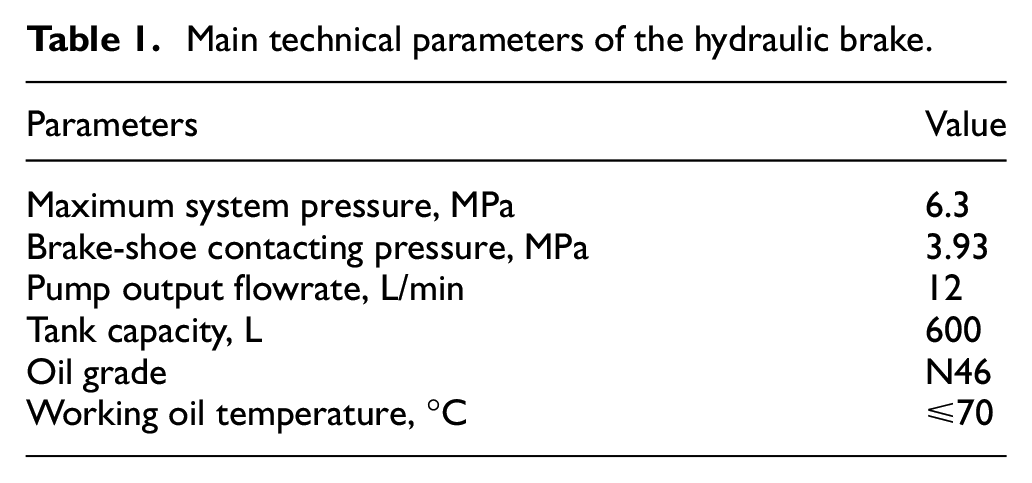
The operational principle is that the system pressure can be adjusted with continuously changing current signal to realize different deceleration. When taking the deceleration as the feedback, it’s achievable to keep the deceleration at a stable value. During deceleration control, such indexes as overshoot, response speed, and steady-state error are of great significance. With what control strategies to get better control performance is the vital question that needs deep investigation.
Control strategies of the constant deceleration compensation device
PID controller has been widely used in industrial control because of its simple structure, good robustness, reliable operation, and convenient adjustment, but the selection of its working parameters such as proportional coefficient

Schematic diagram of Fuzzy Neural Network PID controller.
The Fuzzy Neural Network used in this controller, shown as Figure 3, has five layers, which are the input layer, membership function generation layer, reasoning layer, normalization layer, and output layer.

Control model of Fuzzy Neural Network of the constant deceleration compensation device.
In the following expression,
The first layer is the input layer. Deceleration error and its changing rate go to the nodes of this layer, and they are passed to next layer, that is


where i = 1, 2; j = 1, 2, …, 7.
The second layer is the membership function generation layer. The input deceleration error and deceleration change rate are converted to seven fuzzy language variables, which are NB (negative big), NM (negative middle), NS (negative small), ZO (zero), PS (positive small), PM (positive middle), and PB (positive big). 6 Gaussian membership function is used to calculate the membership degrees of the input, 7 corresponding to the seven fuzzy subsets, that is


where i = 1, 2; j = 1, 2, …, 7.
The third layer is the fuzzy reasoning layer. There are 49 rules in this system, and each node in the network represents a rule in the fuzzy rule base. This layer matches the fuzzy rules according to the upper layer, and completes the reasoning operation of each node. That is to calculate the adaptability of each rule corresponding to the combination of deceleration error and deceleration error change rate expressed by the fuzzy language


where
The fourth layer is the normalization layer. The number of nodes in this layer is the same as that in the third layer. This layer realizes the normalization of the results of the previous layer of fuzzy reasoning


where
The fifth layer is the output layer. The result of fuzzy reasoning is a fuzzy set, which cannot be directly output to the control system. The function of this layer is the defuzzification to obtain the change amount of the three PID parameters


where
Training of the Fuzzy Neural Network
In the Fuzzy Neural Network, the central values

where
The learning algorithm of weight coefficients is

The learning algorithm of the width values



where
Based on the sample set that is collected through the simulation of the predesigned fuzzy PID control system under various conditions of hoist brakes, the parameters above are obtained through training.9–11 Figures 4 and 5 show the trained membership function of deceleration error and the change rate of deceleration error, as well as the change amount of proportional coefficient

The obtained membership function through training: (a) deceleration error; (b) change rate of deceleration error.

3D surface of (a)
Simulation of the constant deceleration brake
With the hydraulic and PID parameters above, simulation is done before the practical device is built. AMEsim and Simulink are combined in this simulation. 12 The former is good at simulating hydraulic transmission system,13,14 while the latter is more appropriate for complicated algorithm, such Fuzzy Logic 15 and Neural Network. The models built in AMEsim and Simulink are shown as Figures 6 and 7, respectively. Parameters of the AMEsim model are according to the transformed hydraulic system, and parameters of the Simulink model are the result of the Fuzzy Neural Network training. It’s obvious that the Simulink model is actually a sub-module in the AMEsim model.
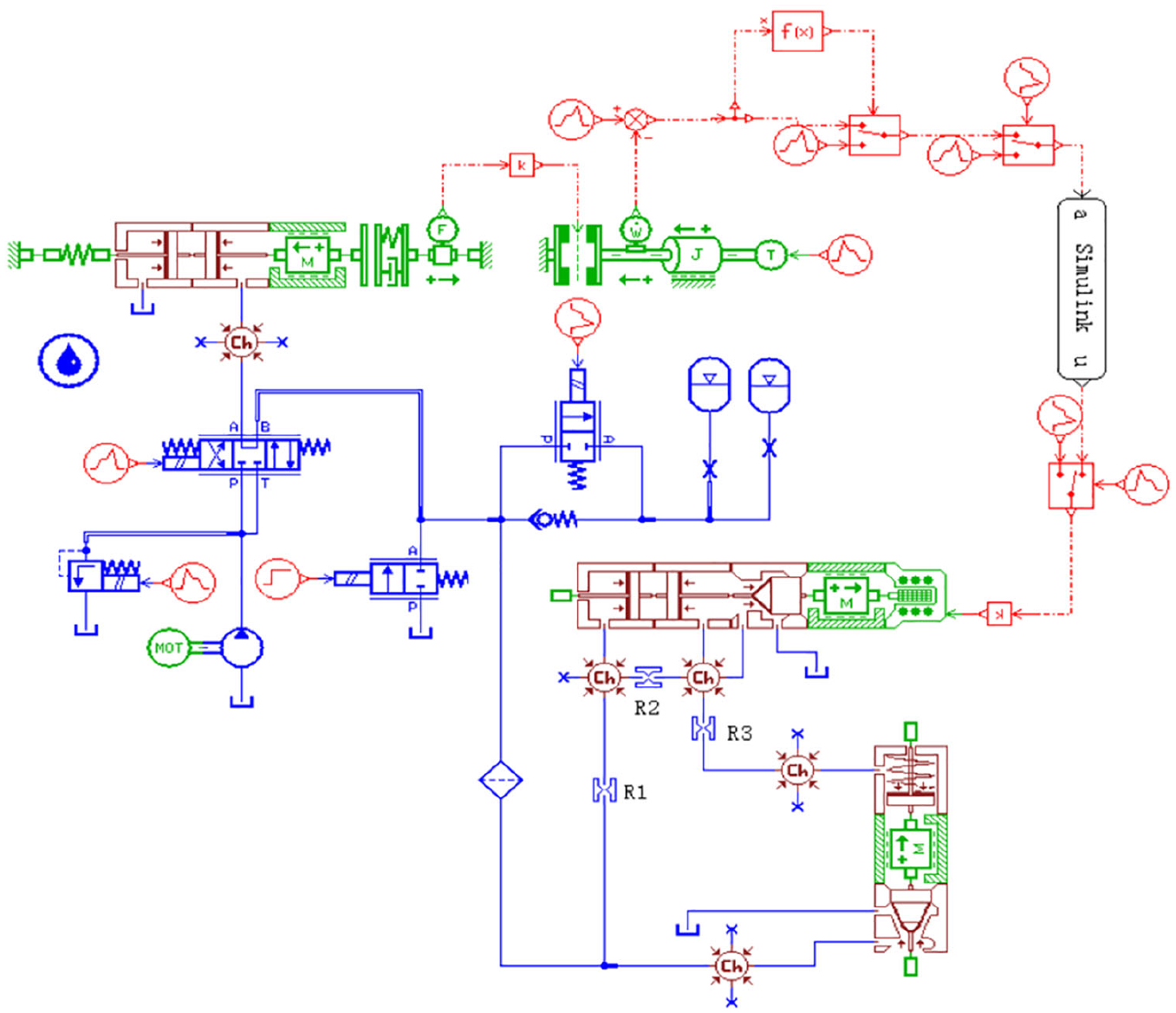
AMEsim model of the constant deceleration compensation device.
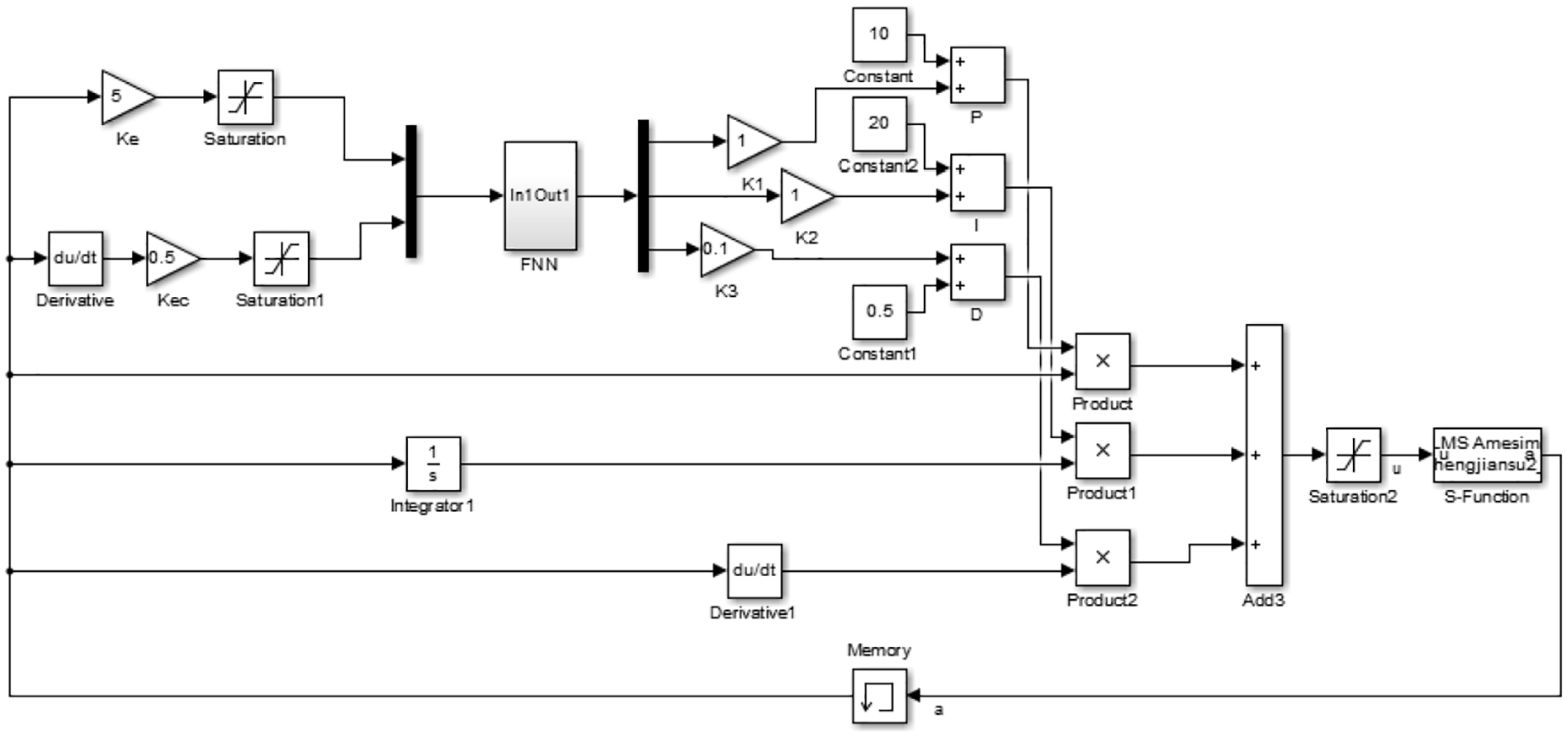
Simulink model of the Fuzzy Neural Network PID.
For hoists, there are various working conditions such as no-load lifting, no-load lowering, heavy load lifting, and heavy load lowering. Here, the condition of no-load lifting is taken as the example, and the deceleration is set to −2, −3, and −4 m/s2. The result is shown in Figure 8. In comparison with previous Fuzzy PID, Fuzzy Neural Network PID responds faster and achieves the preset deceleration more quickly.

Simulation result of the constant deceleration compensation device.
Industrial field test
Previous simulations have illustrated the feasibility of this constant deceleration compensation device. Then, an actual device is built, as shown in Figure 9, which is then tested on a real hoisting system in a mine. One the basis of the original brake, constant deceleration compensation device is added, including its hydraulic part and control system.

Constant deceleration compensation brake.
Figure 10 shows the result of one of the field tests. During this test, with the trained Fuzzy Neural Network, the developed controller calculates the change amount of proportional coefficient

Braking effect of the constant deceleration compensation device in field test.
Conclusion
Constant torque brakes bring change to the deceleration under different working conditions, which causes danger to the hoists when the deceleration goes beyond the safe range. Hence, there is a huge demand for constant deceleration brakes. However, complete sets of such product by huge companies such as ABB or SIMAG are not what ordinary mining enterprises can afford. As an alternative option, a constant deceleration compensation device is studied. Combination of Fuzzy Logic and Neural Network are combined with classical PID control theory to realize the constant deceleration. AMEsim and Simulink are employed to simulate the performance of the constant deceleration compensation device, and the result illustrates that the Fuzzy Neural Network PID outperforms the original Fuzzy PID algorithm because the Fuzzy rule is based on simulation analysis instead of subjective experience. On the basis of the simulation result, an actual constant deceleration compensation device is set up and tested in industrial field. The application shows that the developed device can realize a stable constant deceleration within a short time. In this way, the transformed brakes have constant deceleration braking function at a much lower cost without dismantling the original part. The constant torque braking module is remained as a backup, and the reliability of the hoisting system has been largely improved.
Footnotes
Handling Editor: Michal Kuciej
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by National Natural Science Foundation of China (Grant number: 51975569, 51675520), the Natural Science Foundation of Jiangsu Province (Grant number: BK20170441), and a Project Funded by National Key Research and Development Program (Grant number: 2016YFC0600905).