
Abstract
As part of the ocean winch, the traction winch mainly plays the role of attenuating the load tension. It generally uses simple speed control. For the ship-based collection and release system, complex sea conditions make the cable tension constantly changes. The traditional control method will make the cable in the traction winch too slack or too tight. Meanwhile, it can result in the wrong rope, bite rope and slippage, and other phenomena. Eventually, it is leading to cable damage or breakage and equipment loss. Moreover, with the introduction of expensive photoelectric composite cables, there is a greater need for a good control algorithm to extend the life of the cable and ensure the safety of retrieval and release. Therefore, this paper focuses on the constant tension control of the traction winch cable. In this paper, the NARX neural network-based cable tension compensation value prediction model is established as the feedforward part based on historical ship heave displacement data and cable tension compensation data as training data. On this basis, the simulation model of cable constant tension winch based on common PID control, fuzzy PID control, and BP fuzzy neural network PID control are established. By comparing the tension of the cable with the above controller, the results show that the tension control of the cable based on the NARX neural network predicted tension compensation value plus BP fuzzy neural network PID control has high accuracy, fast dynamic response, smooth system, and no overshoot.
Introduction
With the increasing demand for various resources from various countries, the ocean has attracted the attention of various countries. In order to utilize marine resources, various deep-sea equipment has been researched and developed. One of them, ocean winch, a kind of marine equipment, is widely used in underwater towing systems, including subsea equipment installation, ocean pipeline laying, ocean drilling, marine exploration equipment, and other aspects.1–3 According to the different structures, the ocean winch can be divided into a single reel, followed by the storage cable and traction separation structure form. 4 This paper mainly studies the constant tension control of traction winch cable.
As traction winches work in such complex occasions in the ocean, affected by waves, currents, high winds, and other harsh environments, the mother ship where the traction winch is located will produce longitudinal rocking, transverse rocking, lifting and sinking movements, and other phenomena. 5 Among these, the heave effect has the most significant impact on the equipment receiving and releasing the cable. Cause the traction winch on the photoelectric composite cable in the collection and release of the cable in the process of tension constantly change. So that the terminal equipment with the cable up and down shaking, very easy to cause damage to the cable, broken, the most severe consequences for the equipment damage or loss. In order to change the above situation, a hull motion control system was first added to control the six degrees of freedom motion control of the hull in the process of marine equipment stowage. 6 Secondly, in order to ensure the safety of marine equipment during retrieval, an active lift compensation system (AHC), hybrid active-passive lift compensation system (HAHC), and passive lift compensation system (PHC) has been developed. 7 The passive lift compensation system (PHC) is simple in structure. It does not consume additional energy, while the active lift compensation system (AHC) needs to be powered by hydraulic pumps and motors to operate. Compared to the lower accuracy and instability of the passive lift and sink compensation system (PHC), the AHC compensation system can compensate up to 95% efficiency in any ship’s lift and sink condition, so the more efficient AHC compensation system is widely used. 8
Nowadays, there are various developments of AHC compensation technology in terms of structure and control algorithms with the in-depth research of the lift-sink compensation technology. For example, many scholars and companies try to apply sliding mode control algorithms,9,10 chaos synchronization control algorithms,11–14 pseudo-differential feedback algorithms, artificial Intelligent, 15 neural networks, deep learning, and other algorithms in AHC compensation systems. Dr. Rexroth has developed the RAHC compensation technology, in which the RAHC compensation system has a particular constant tension control system. Woodacre et al. 16 used a simple hydraulic valve as an active lift compensator, established an MPC lift compensation control algorithm and compared it with a conventional lift compensation control algorithm in terms of predictive compensation, and showed that the MPC controller could achieve a decoupling rate of 99.6%. In the active compensation technology, many researchers focus on predicting the state of heave motion in advance and improving its prediction accuracy. Richter et al. proposed an integrated active lift and sink compensation system. Relying on the Levinson recursive least squares algorithm for motion prediction, the motion model of the hydraulic winch is derived, and the overall compensative performance and accuracy of the constructed system is measured using a full-scale AHC test stand. 17 Tang et al. proposed an improved LSTM neural network model with random loss to solve the problem of control performance degradation caused by time delay in wave systems. The model can deal with time series well. By comparing with backpropagation neural network and standard LSTM neural network, the average absolute percentage error (MAPE) is improved by 1.05 × 10-2% and 1.42 × 10-4% respectively. It is essential for studying the stability of offshore operations. 18 Liu et al. developed a new top crown heave compensation system with a composite cylinder in oil drilling. They compared it under PID control, fuzzy PID control, and TSM control strategies and found that the TSM control strategy was optimal. 19 In the process of cable take-up and payoff, the payload of the cable is usually disturbed by various nonlinear factors, including viscous drag, inertial force, the friction of the mechanical system, nonlinear traction force caused by wave heave motion as well as others, so the traditional control strategy is difficult to achieve the stability of the system in the whole range under different sea conditions.20,21 Li et al. designed a new semi-active lift-sink compensation system that can switch back and forth between passive and semi-active compensation modes. Also, in the control system, Li et al. compared the advantages and disadvantages of three control strategies, namely displacement control, tension control, and tension displacement. Finally, the tension-displacement control strategy was adopted. They also added an active immunity controller (ADRC) to ordinary PID control to improve the tension compensation performance. 21 In addition, Fei et al. proposed an adaptive robust integral sliding film controller based on the back-stepping method. This controller was used to achieve constant tension control of the lift and sink compensator for heavy-duty deep-sea towing systems. They simulated and experimented with this controller by using lift and sink data measured under different sea conditions. The results show that the proposed adaptive robust integral sliding film controller has advantages over the conventional PI controller regarding the accuracy and robustness of tension compensation. 22 From the above, most of the scholar’s research in lift and sink compensation is directed to the study of single reel hydraulic or electric winches and the study of controlled lift and sink displacement. There is little research on the constant tension control of traction winch under heave. But for the electrically driven traction winch is basically a function of tension reduction, and its control is simple. However, from the previous results, the cable behaves as slack or tension under the condition that the heave action constantly changes the cable’s tension. Conventionally controlled traction winch in the cable is easy to cause cable misalignment, bite rope, and other phenomena.
Therefore, in order to solve the above situation, this paper studies the problem of constant tension control of the cable when the electrically driven traction winch is retracting and releasing the cable. Among them, the traction winch in the collection of cable as a traction device. Furthermore, the load drives the traction winch to rotate when releasing the cable, and at this moment, the traction winch is pulled by inverted. So the constant tension control method of the traction winch cable is proposed as: firstly, control the traction winch to output the same force as the load. Then, the tension compensation values under different loads and wave levels are predicted by NARX neural network as the interference input of the control system, so that the traction winch can adjust the output tension under the action of the controller. Ensure constant tension throughout the system. In addition, in the control system, BP fuzzy neural network PID control was established to control the traction winch based on common fuzzy PID control. The PID control, fuzzy PID control, and BP fuzzy neural network PID control are compared through simulation. It is demonstrated that the established BP fuzzy neural network PID control-based cable constant tension control system has higher accuracy and better stability. It can effectively maintain the tension of the cable in a stable range and make the cable in an appropriate tension range. And prolong the service life of the cable to prevent major economic losses and personal safety caused by cable damage.
The following assumptions were made to facilitate the design of the constant tension controller for the traction winch cable:
The weight of the cable itself does not count; the load is completely submerged in the water subject only to the buoyancy of seawater, ignoring the impact of forces generated by underwater currents and others.
The sea state is simplified by excluding the effects of wind, currents, and waves.
Mechanical analysis of electric drive traction winch cable
The electric drive winch system mainly comprises cable storage winch, cable slack compensator, traction winch, landing gear, pulley, and other components. A sketch of its structure is shown in Figure 1.
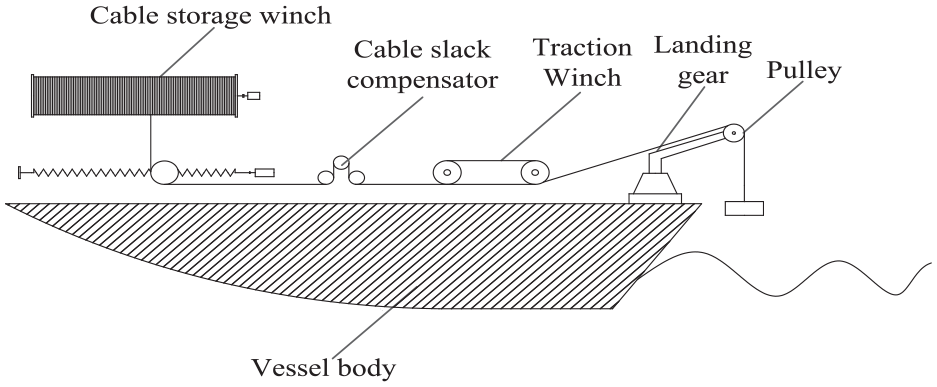
Sketch of the electric drive winch structure.
Ship equations of motion
In the process of deep-sea equipment stowage, the equipment is most affected by the lifting and sinking motion of the mother ship. The lifting and sinking motion of the mother ship is regarded as an ideal sinusoidal signal. In which the lift and sink displacement of the mother ship is determined by the wave height, hull type, structure, size, and other factors, the equation of motion of the mother ship is 23 :

where μ is the ratio of lifting and sinking displacement to wave height (μ takes a value between 0.1 and 0.3 for waves less than level 4 and between 0.3 and 0.5 for levels 4–6 24 ), H is the wave height, T is the period; y is the mother ship displacements.
Thus the heave velocity v of the mother ship and the acceleration a can be obtained from the derivation of equation (1) for time t as follows:


Wave motion equation
In order to calculate the load’s velocity and acceleration relative to the ground coordinate system during a period of time into the water, it is necessary to know the velocity and acceleration of the water quality point. The potential function of the velocity of the flow field can be obtained according to the micro-amplitude wave theory in the wave theory 25 :


Where k is the wavenumber, L is the wavelength; h is the water depth, σ is the wave angle frequency.
Taking the partial derivative of the above equation with respect to y0 yields the vertical velocity of the water quality point:

Neglecting the effect of the horizontal direction

Again, the partial derivative of w concerning time t yields the acceleration

Cable tension calculations
Before entering the water, the cable tension is a sum of the gravity of the load and the additional tension generated by the displacement of the mother ship lifting and sinking. 26 The equation can be expressed as:

Among them:

Where


y2′′ is the load’s acceleration relative to the ground coordinate system for a certain period of time just after entering the water, Fw is the wave force applied to the load in the vertical direction, Fb is the buoyancy force applied to the load.
The wave force in the vertical direction to which the load is subjected is:

Among which:

Where CL is the drag coefficient (generally taken as 1.67),
The load is subjected to a buoyant force of:

V is the volume of seawater rejected by the load.
The tension of the cable can be obtained by substituting the above equations (12) and (14) into equation (10) as:

When the load is all submerged in seawater during collection and release, the wave force is negligible, so the tension on the cable can be expressed as follows:

Substituting equations (9) and (14) into (16) yields:

From the above equations (8), (15), and (17), the cable tension is affected by the wave. During cable take-up and take-down, the dynamic tension response is oscillatory form. In this state, the load with the mother ship under the action of waves shows as heave up and downstate. At this moment, the cable is taut or relaxed. The move will cause the traction winch on the cable misalignment and cable fatigue damage. It may lead to the loss of load equipment causing significant economic losses. Therefore, it is necessary to control the constant tension of the cable. When the traction winch puts away the equipment, the traction winch should ensure the life of the cable and stability and accuracy.
NARX neural network tension compensation value prediction model
NARX neural network
The cable in the heave and sink movement to maintain constant tension needs to change the traction winch tension output. That needs to know the cable tension compensation value. The second section can get the cable tension calculation method so that the cable tension compensation value can be obtained by the difference between the cable tension value and the current load. Since the adjustment of the traction winch takes some time, the cable tension compensation value needs to be predicted so that the traction winch enters early to change the tension output. So the NARX neural network is used here to predict the cable tension compensation value. The NARX neural network is a model proposed by Leontaritis and Billings 27 for nonlinear discrete systems, based on the linear ARX model, and is used for time series modeling. By using one or more values from the past time series as input to predict a single value or multiple values in the future, this can be expressed as:

Where u(t1), y(t1) are the input and output of the neural network at t1, nu is the maximum order of input delay, ny is the maximum order of output delay, u(t1−nu),…,u(t1−2),u(t1−1) are the historical inputs relative to t1, y(t1−ny),…, y(t1−2), y(t1−1) are the historical outputs relative to t1, f() is the fitted nonlinear function.
The NARX neural network includes an input layer, a hidden layer, and an output layer, and the structural model is shown in Figure 2. The structural model of the NARX neural network and the gradient descent algorithm used in the hidden layer give it a better convergence speed and learning efficiency compared to general neural networks. 28 In this article, when the cable is receiving and laying, the traction winch under different waves carries the different weights of loads to predict the cable tension compensation value. Through the simulation, the historical data of the mothership’s heave displacement and the tension compensation value of the cable is obtained. The cable tension compensation value in the following period of time and the advance prediction of the cable tension compensation value is realized. Among them, the number of implicit layer unit nodes is determined according to the input and output data and the final construction of the NARX neural network implemented.
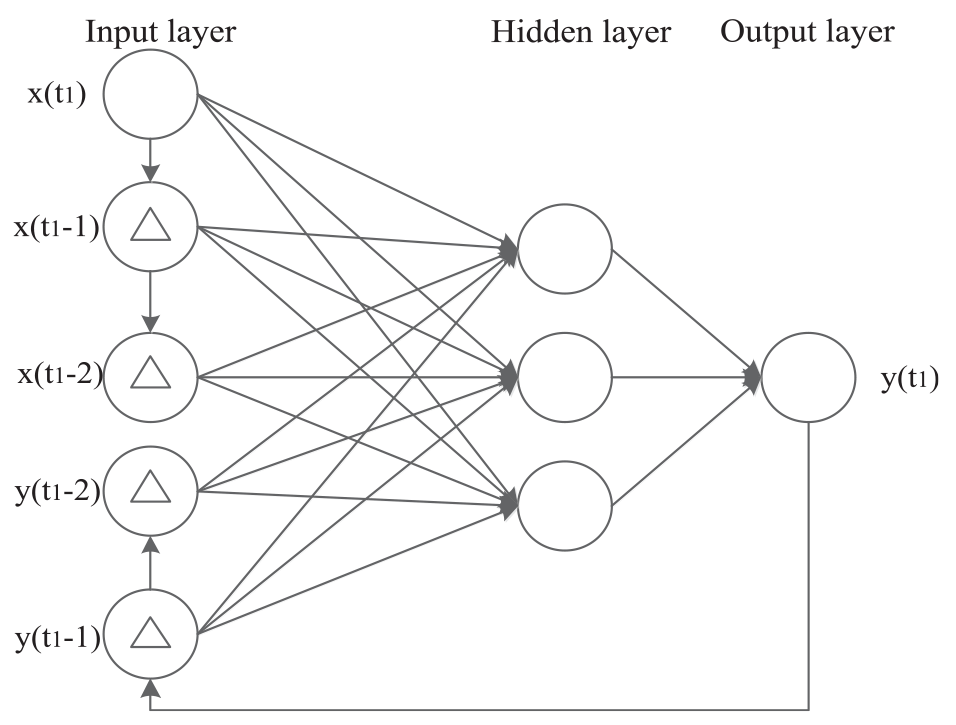
Structural model of NARX neural network.
Cable tension compensation value prediction model building process
In this paper, we choose to predict the cable tension compensation value in the cases of 300, 500, 800 kg load and 0.5, 1, 2, 3.4 m wave height respectively. A sinusoidal signal in 200 s time is used to simulate waves. Next, the ship lifting and sinking displacement model and the cable tension compensation value calculation model are established in the simulation software. The ship lifts and sinks displacement dataset under time series is collected as input and the tension compensation value dataset as output. Then the normalization process is performed. The 65 s of displacement and tension compensation value data were collected as training data with a sampling interval of 0.01 s. The wave data and cable tension compensation value data for each case were 6500 sets. Further, choose 70% data as the training set, 15% data as the validation set, and 15% data as the test set. Then, the number of implied layer nodes and the delay order must be adjusted reasonably for different loads and different sea conditions. Next, the Levenberg-Marquardt algorithm is chosen as the training algorithm. Finally, we start training and adjust the learning rate, implicit layer, and other factors until we get the correct data for inverse normalization and output the prediction results. The flow of its neural network establishment is shown in Figure 3.
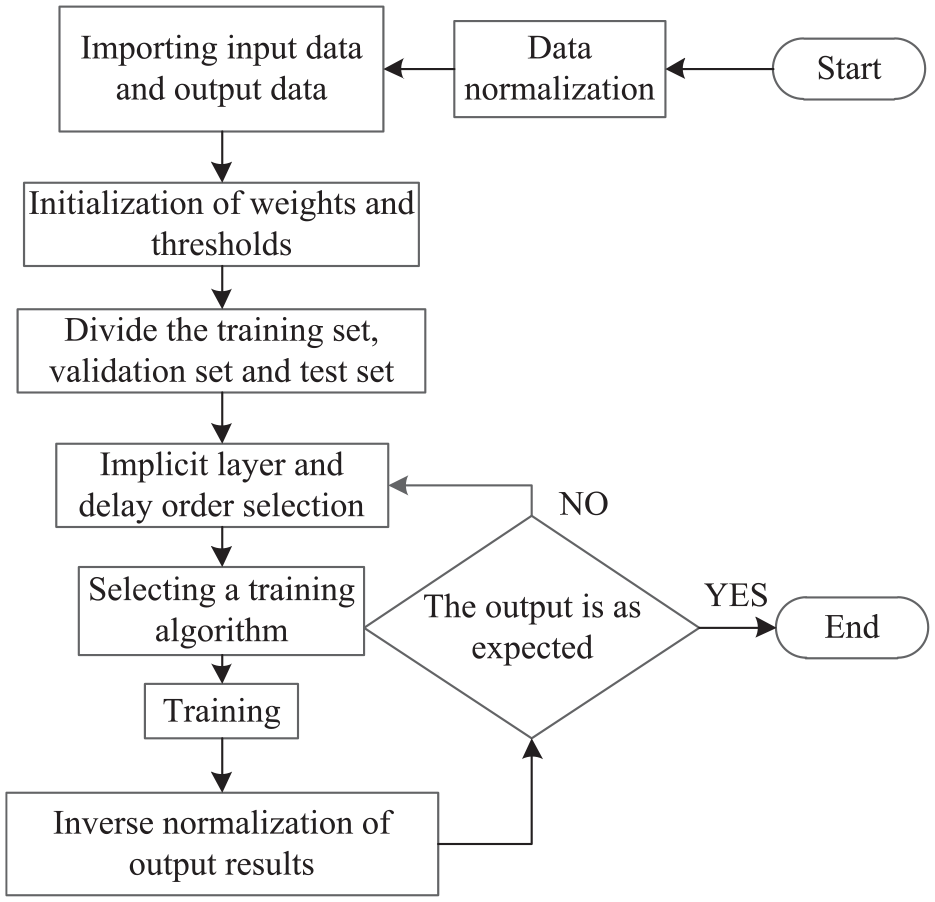
NARX neural network building process.
Analysis of NARX neural network prediction results under different situations
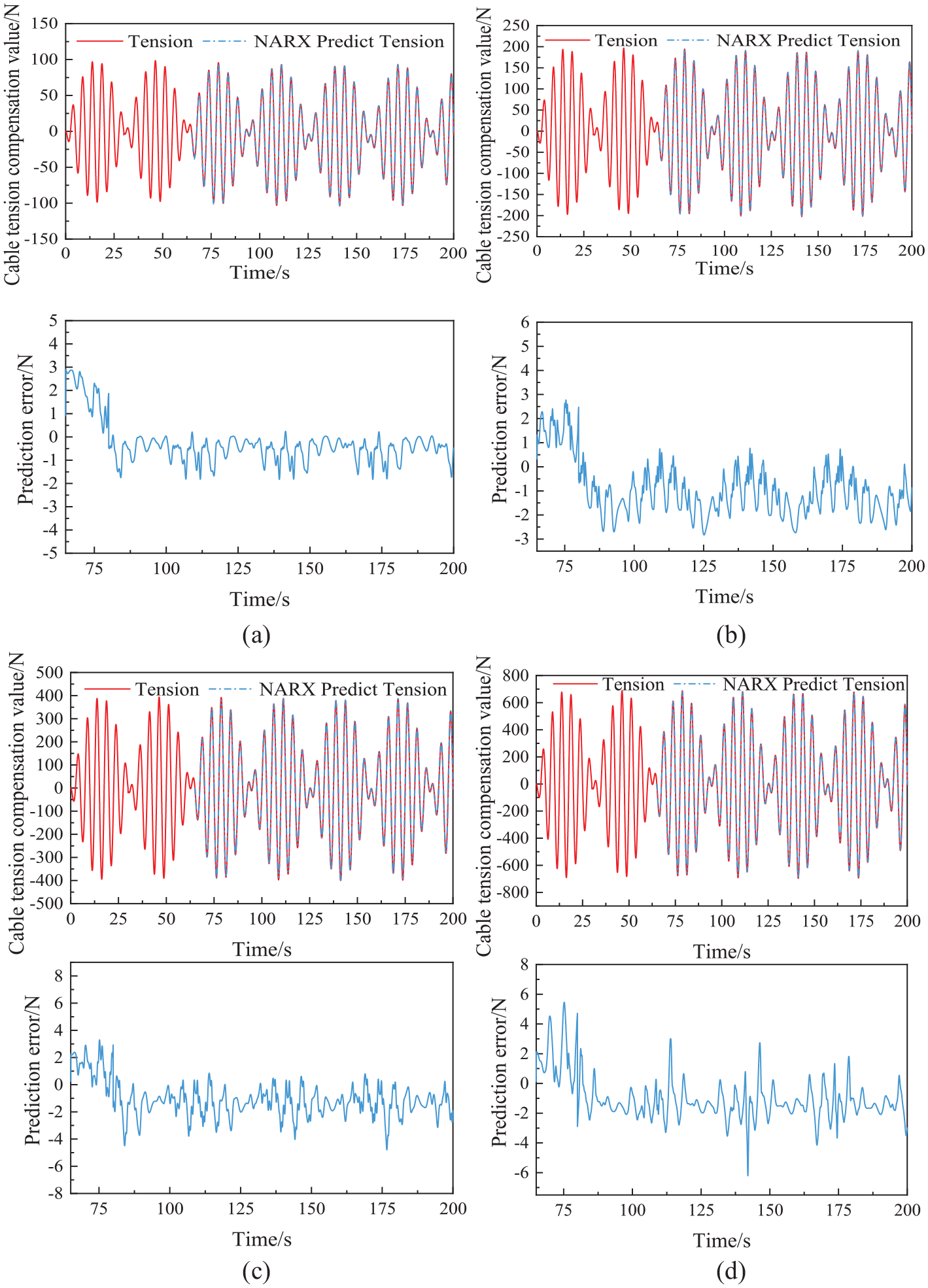
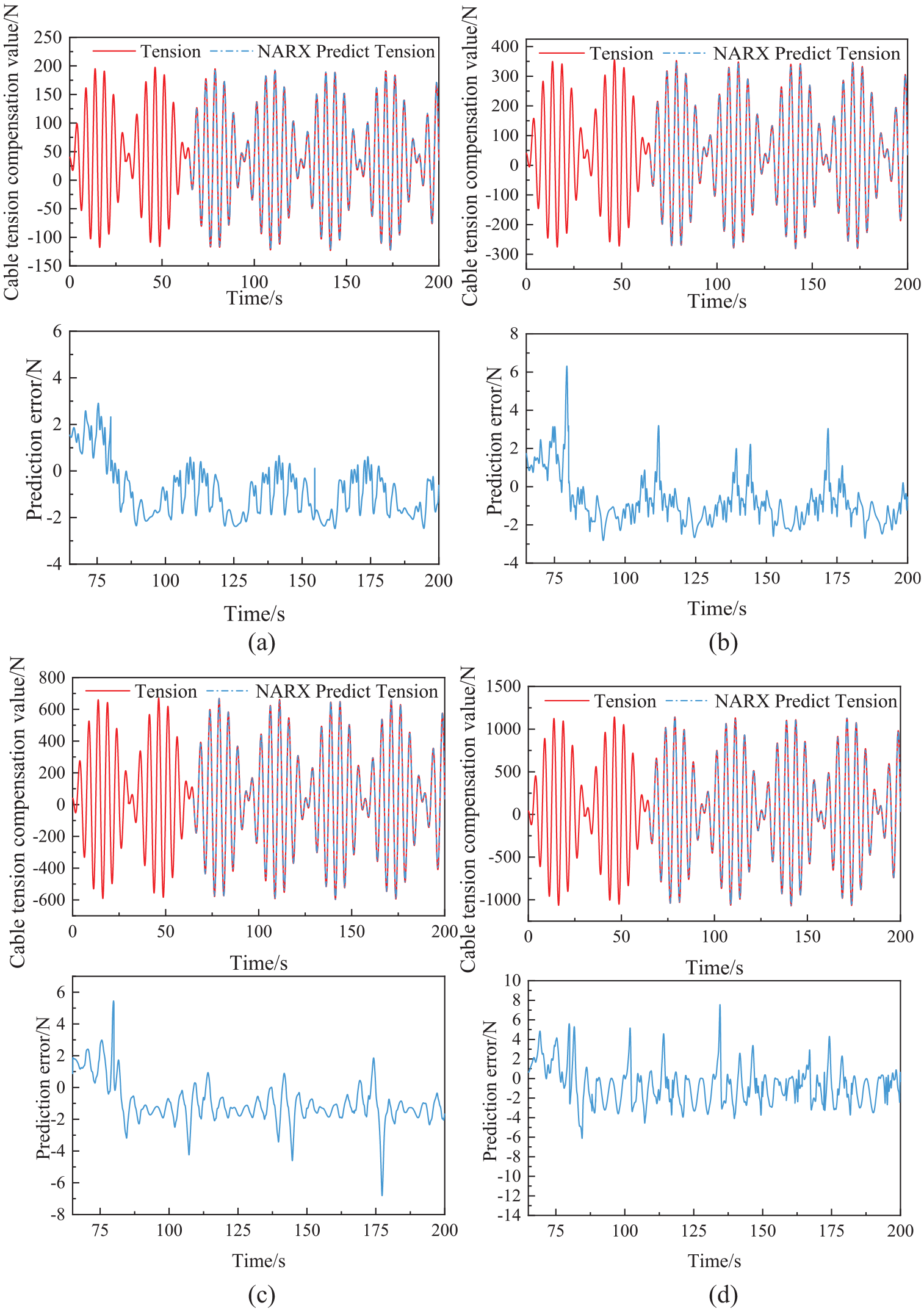
The comparison plots of the NARX neural network prediction results with the actual values under different loads and sea conditions, and the real error plots are shown in Figures 4 to 6. From the figure can be obtained when the wave level becomes larger, the cable’s tension will have a significant increase, and the tension compensation value of the cable in about 30 s time to occur a cycle of the cycle. At the same time, in the same sea state and the heavier the load, the tension compensation value of the cable is increasing. In addition, from the NARX neural network prediction of the cable tension compensation value and the actual tension compensation value of the error graph can be analyzed in the maximum value of the tension compensation error is distributed between 65 and 100 s, when the cable tension compensation value suddenly rises or fall, the prediction of the true error will also be a large change.
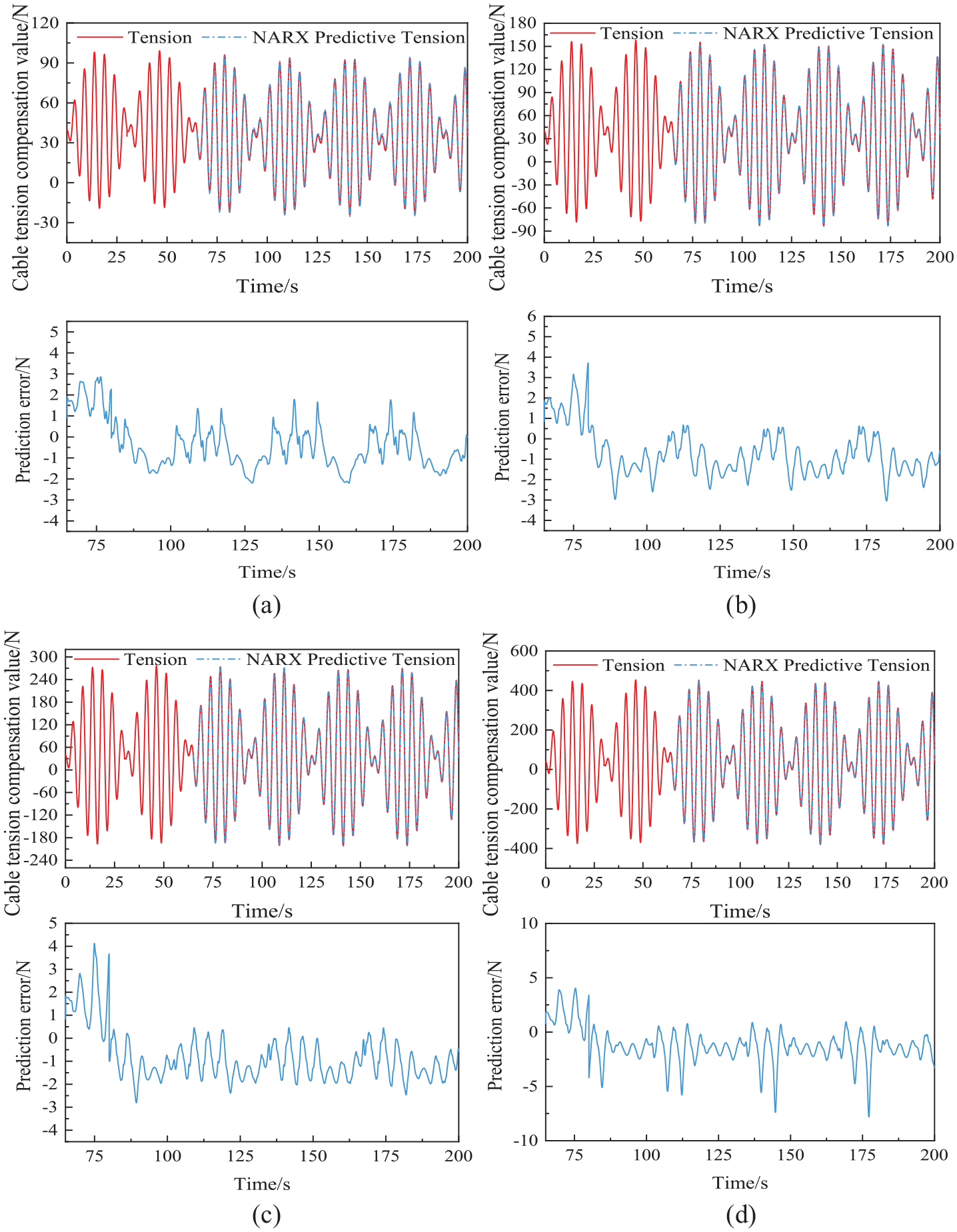
Predicted and actual values of cable compensation tension for 300 kg load: (a) H = 0.5 m, (b) H = 1 m, (c) H = 2 m, and (d) H = 3.5 m.
Predicted and actual values of cable compensation tension for 500 kg load: (a) H = 0.5 m, (b) H = 1 m, (c) H = 2 m, and (d) H = 3.5 m.
Predicted and actual values of cable compensation tension for 800 kg load: (a) H = 0.5 m, (b) H = 1 m, (c) H = 2 m, and (d) H = 3.5 m.
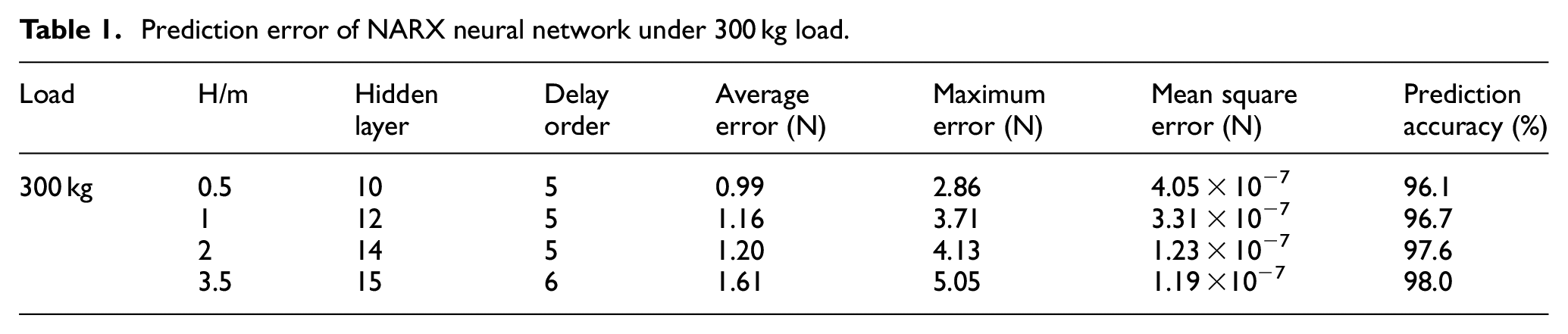
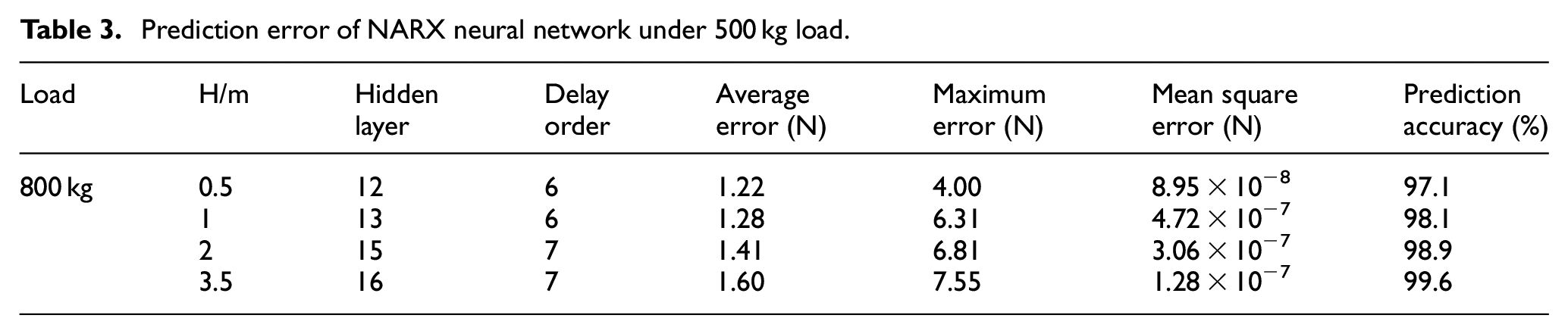
In addition, the prediction model structures and training results for different loads and different sea states are shown in Tables 1 to 3. The results in Tables 1 to 3 show that the number of nodes in the hidden layer required for the neural network increases when the load is higher or the wave level is higher. At the same time, the actual average and maximum errors of the neural network predictions increase with higher loads and higher wave levels. In addition, when the NARX neural network predicts the tension compensation value under different sea conditions with different loads, the small tension compensation makes the prediction accuracy poor. While the prediction effect is better when the tension compensation value is larger. Finally, the prediction accuracy of the NARX neural network can reach more than 96.1% under different loads and different sea conditions.
Prediction error of NARX neural network under 300 kg load.
Prediction error of NARX neural network under 500 kg load.
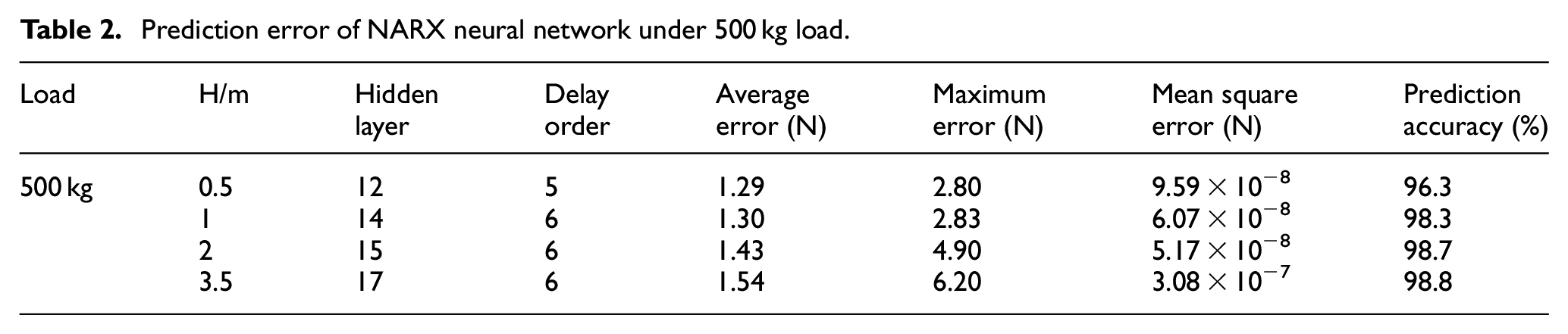
Prediction error of NARX neural network under 500 kg load.
Electric drive ocean traction winch cable constant tension control system to establish
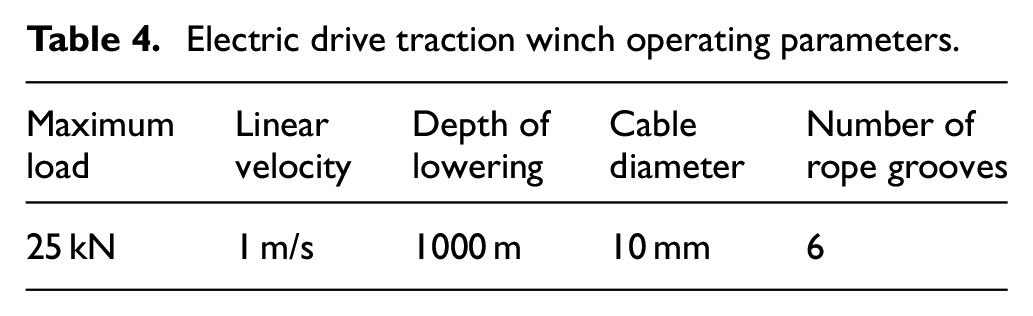
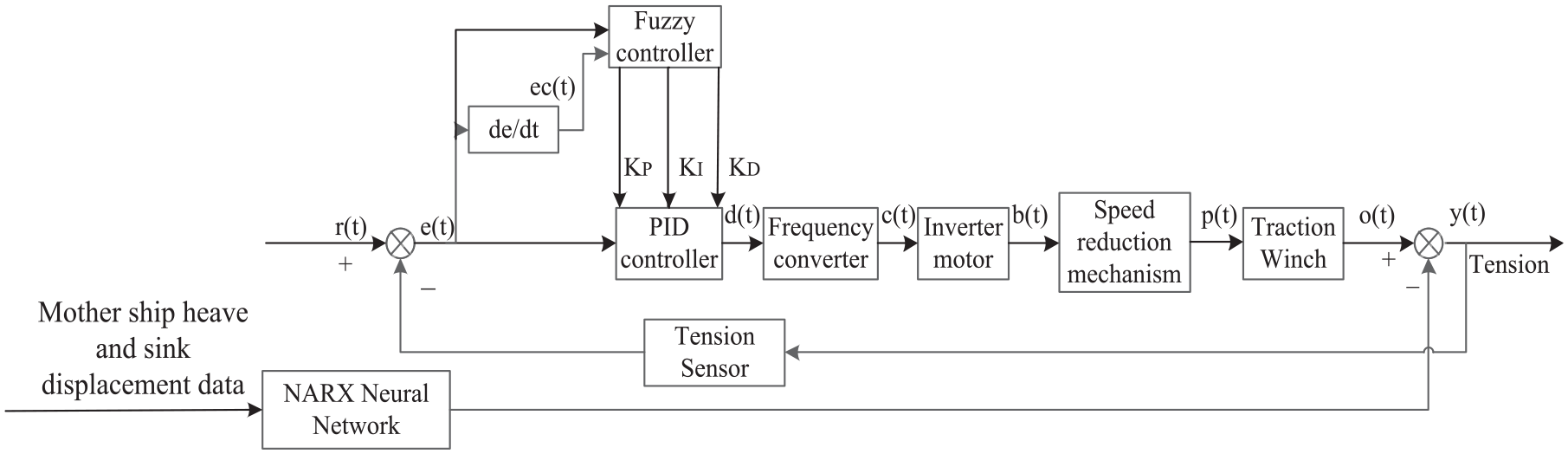
Establish the block diagram of the constant tension control system of traction winch, as shown in Figure 7. First, we set the same tension input value as the load while using the ship heave displacement data as the NARX neural network model input for predicting the tension compensation value. Then, the prediction value for cable tension compensation is used as the disturbance amount of the system. The controller uses PID control, fuzzy PID control, and BP fuzzy neural network PID control. Second, the torque output from the traction winch is used as the tension output of the system. The tension control effect is determined by observing the tension change of the cable under the constant tension control of the traction winch cable. Furthermore, to find out the optimal control strategy among these three controls, NARX neural network plus PID control, NARX neural network plus fuzzy PID control, and NARX neural network plus BP fuzzy neural network PID control are used to control the constant tension of the traction winch cable. In addition, some parameters of the traction winch are shown in Table 4.
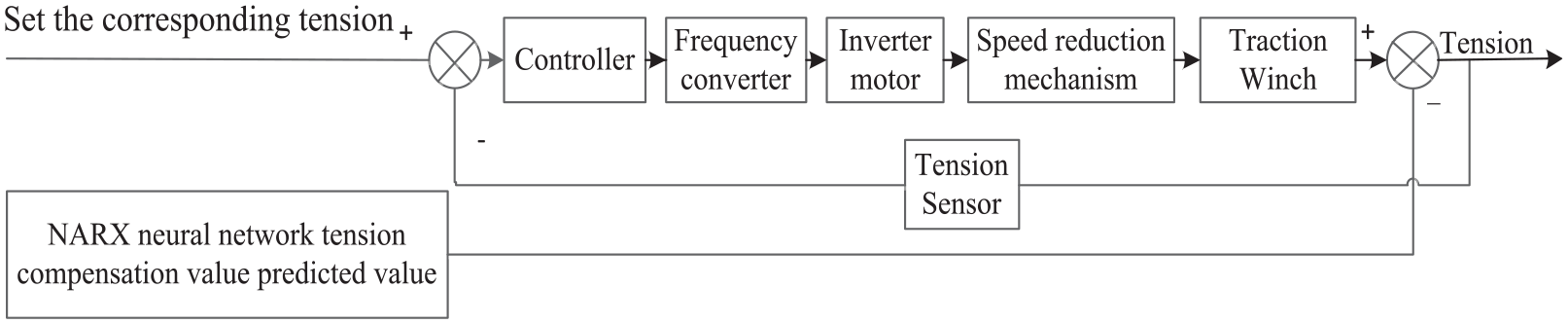
Block diagram of the traction winch control system.
Electric drive traction winch operating parameters.
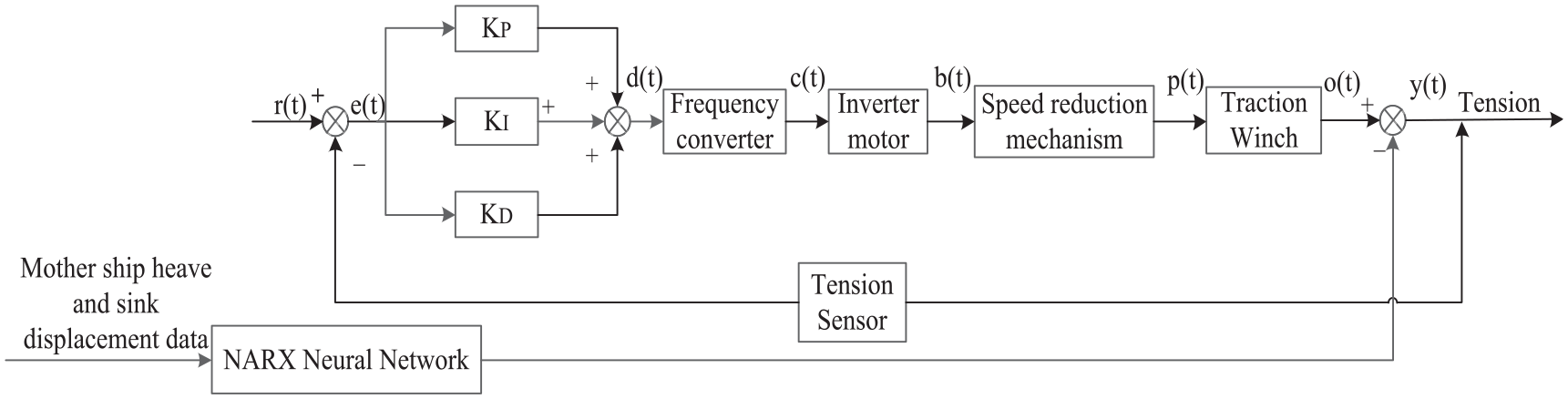
Mathematical model of the traction winch
The block diagram of the transfer function of the traction winch is built, as shown in Figure 8. In the figure, K4 is the cable tension sensor, K1 is the transfer function between the frequency converter and the motor, that is:


Block diagram of the traction winch transfer function.
Where N is the inverter output torque, U is the analog signal voltage value.
K 2 is the transfer function for the reducer on the inverter motor, that is:

In which i is the gear ratio, φ is the transmission efficiency.
The traction winch is used herein direct torque control mode for torque output, then the torque balance equation of the traction winch is:

Where Mp is the traction winch torque, B = 260 Nms/rad is the traction winch viscous damping coefficient, J is the rotational inertia of the traction winch, Tr is the tension of the cable when entering the traction winch, Tc is the tension of the cable when leaving the traction winch, r is the radius of the winch.
Therefore, the transfer function G3(S) is:

Of which:

K 3 is the cable elasticity coefficient, A is the cross-sectional area of the cable, E is Young’s modulus of the cable, ι is the put-down cable length.
PID control of the traction winch
PID controllers are widely used in all aspects of industrial control and are traditional controllers. The controller of PID is easy to use and robust. 29 However, the PID control has poor anti-interference performance, and the accuracy of regulation under complex models cannot reach the requirement. The specific effect of using PID control for cable constant tension control in this paper is unknown. To verify its control effect, a simulation model based on PID control is established. The model diagram is shown in Figure 9. Here the regulation of the three parameters of the PID is obtained according to the critical proportion method, where the PID control rule is:

PID control of the traction winch.
Where d(t) is the controller’s output signal, e(t) is the deviation signal, TI is the integration time constant, TD is the differential time constant, KP is the proportionality coefficient, KI is the integration coefficient, KD is the differential coefficient.
Fuzzy PID control of traction winch
Fuzzy PID control is developed by adding a fuzzy algorithm on the basis of common PID control, which realizes online self-tuning of PID parameters by establishing a fuzzy rule base. Compared with common PID control, fuzzy PID control has higher accuracy and better stability. It has the anti-interference ability and is suitable for the nonlinear system that ordinary PID control does not have. 30 The model diagram is shown in Figure 10. However, the design of fuzzy PID control lacks systematicity, and the adjustment of parameters requires strong experience and poor self-learning ability. In order to verify its performance, the constant tension control system of traction winch cable based on fuzzy PID control is established in this paper.
Fuzzy PID control of traction winch.
BP fuzzy neural network PID control of traction winch
BP neural network is combined with fuzzy PID control to establish a model for automatic adjustment of PID parameters based on neural network, as shown in Figure 11. In which, the controller is divided into two parts, one part is BP fuzzy neural network, and the other part is the PID controller.
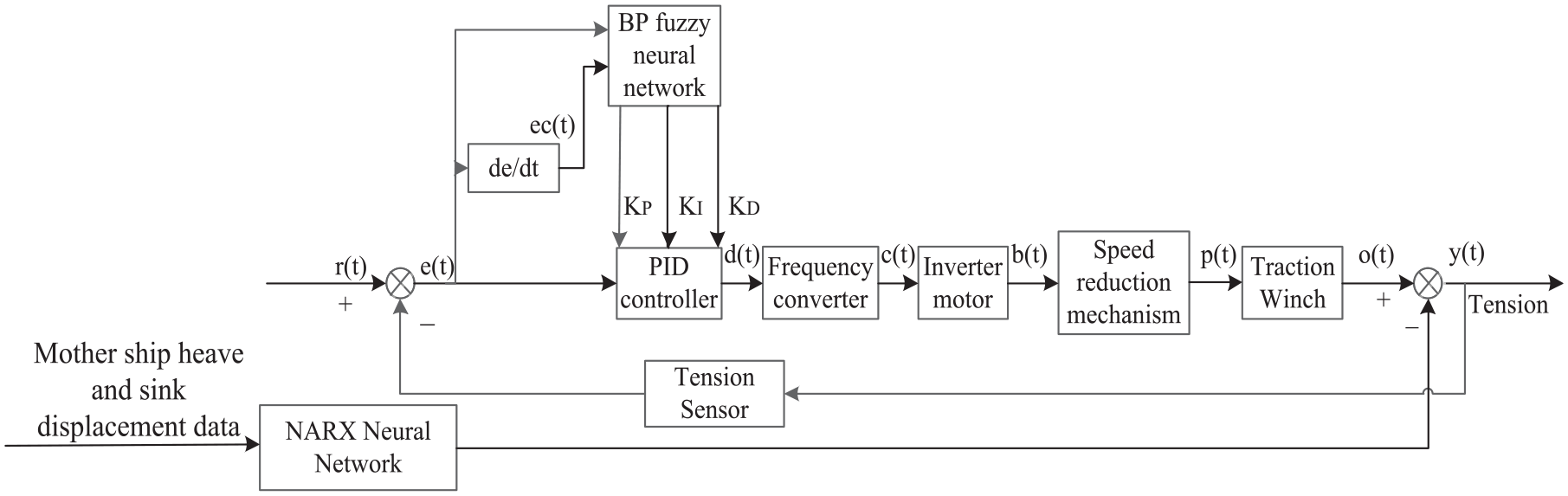
BP fuzzy network PID control of traction winch.
The structure of the BP neural network model is 2-14-49-49-3, as shown in Figure 12. The input layer has two inputs, the error e(t) and the rate of change of the error ec(t). The output control quantity is u(t). Passing these two input signals into the next layer here can be expressed as:

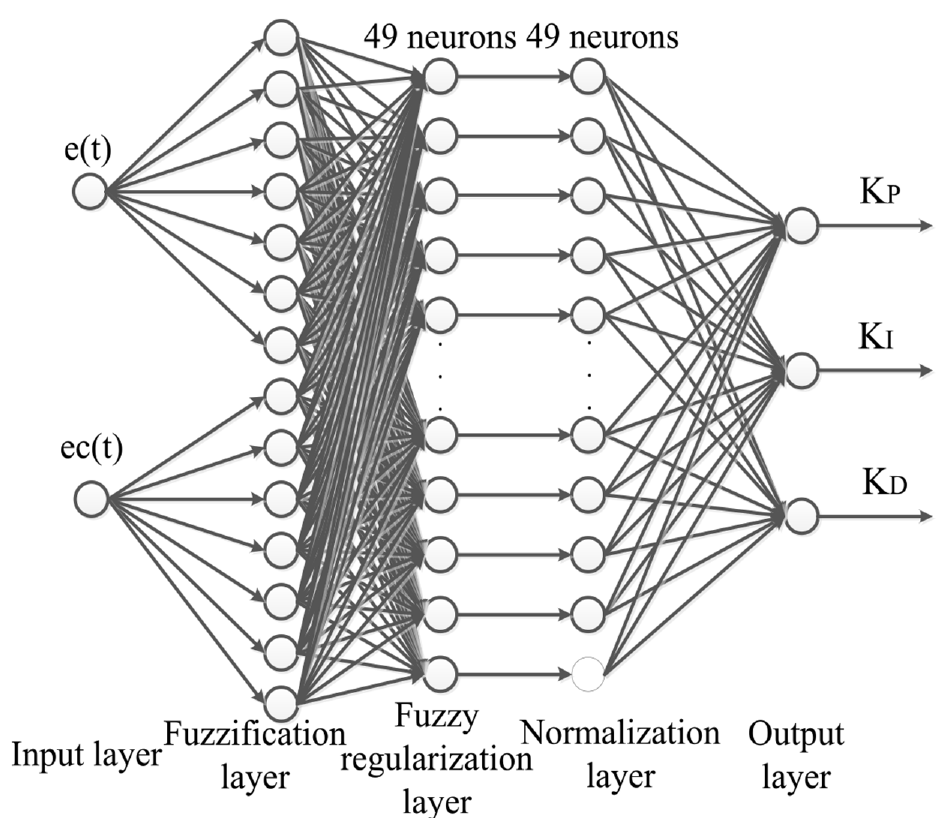
BP fuzzy neural network structure.
where
The next layer is the fuzzification layer with 14 cell nodes. These nodes represent the e(t) and ec(t)’s divided seven membership functions of “negative large,”“negative medium,”“negative small,”“zero,”“positive small,”“positive medium,” and “positive large.” It is mainly used to fuzzify it, then:

Where mcd is the mean difference of the dth affiliation function for the cth input signal, σcd is the standard deviation of the dth affiliation function for the cth input signal.
The third layer is the fuzzy regularization layer, where each neuron node represents the rule’s fitness

The fourth layer is the normalization layer, with a total of 49 neuron nodes. Its role is the normalization calculation of the values of the 49 neuron nodes output from the previous layer. The calculation is done by:

The function of the output layer is to defuzzify the output of the previous layer, which is calculated as:

Here, ωed is the coefficient of entitlement in the neural network,
Where the error function in the network is:

Where r(k) is the desired output, y(k) is the actual output, k is the number of samples during fuzzy PID operation.
In this paper BP fuzzy neural network uses the gradient descent method to correct the weight coefficients of the network with the following algorithm:

ζ is the learning rate; η is the inertia coefficient.
The correction algorithm for the middle layer weights of the network is:

Ocean traction winch cable constant tension control system results analysis
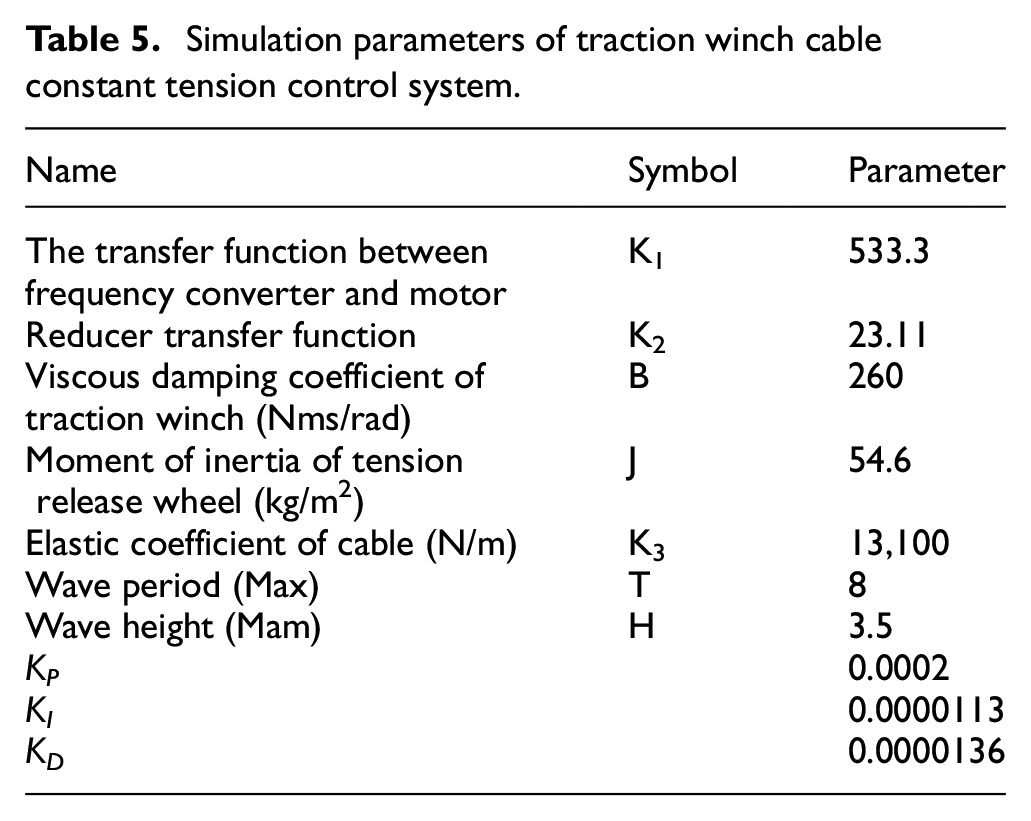
The simulation model is built according to the fourth chapter. The simulation parameters are shown in Table 5.
Simulation parameters of traction winch cable constant tension control system.
By making the traction winch PID control established in the previous section as well as the BP fuzzy neural network-based PID control model, the simulation results are shown in Figures 13 to 15. From the figure can be seen, if not using constant tension control, the traction winch into the rope end of the cable to the load end of the cable tension is constantly fluctuating. When constant tension control is performed, the tension compensation value is firstly predicted by NARX neural network as the disturbance quantity input to the system, and then the traction winch output tension is adjusted by the established controller to keep the cable in constant tension. Among them, the ordinary PID control regulation takes about 0.35 s to enter smoothly, but a certain amount of overshoot appears. The fuzzy PID control regulation time is about 0.22 s and then enters a smooth state. In contrast, the BP fuzzy neural network regulation enters the smooth state at 0.05 s, and no overshoot occurs.
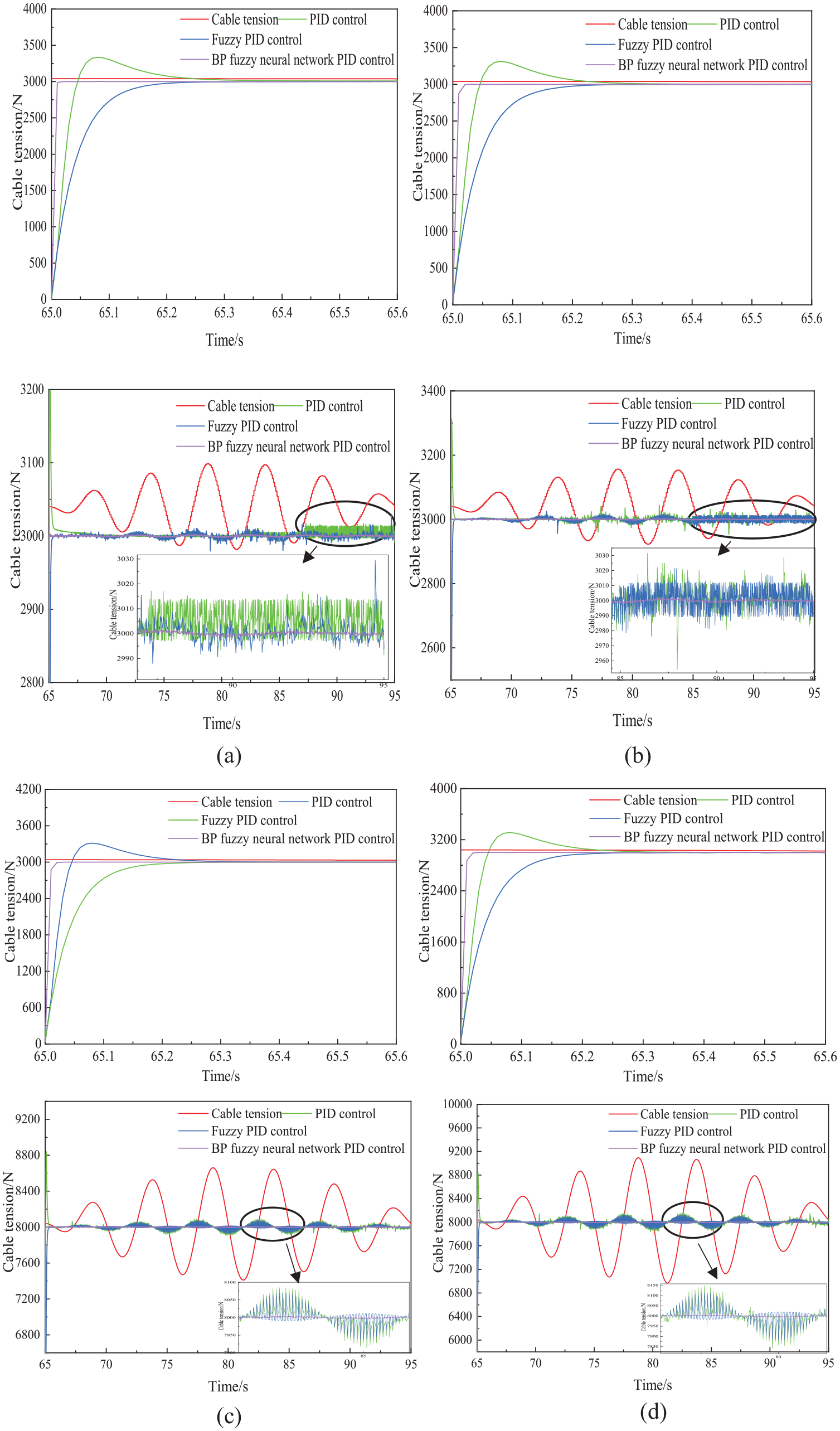
300 kg load constant tension control: (a) H = 0.5 m, (b) H = 1 m, (c) H = 2 m, and (d) H = 3.5 m.
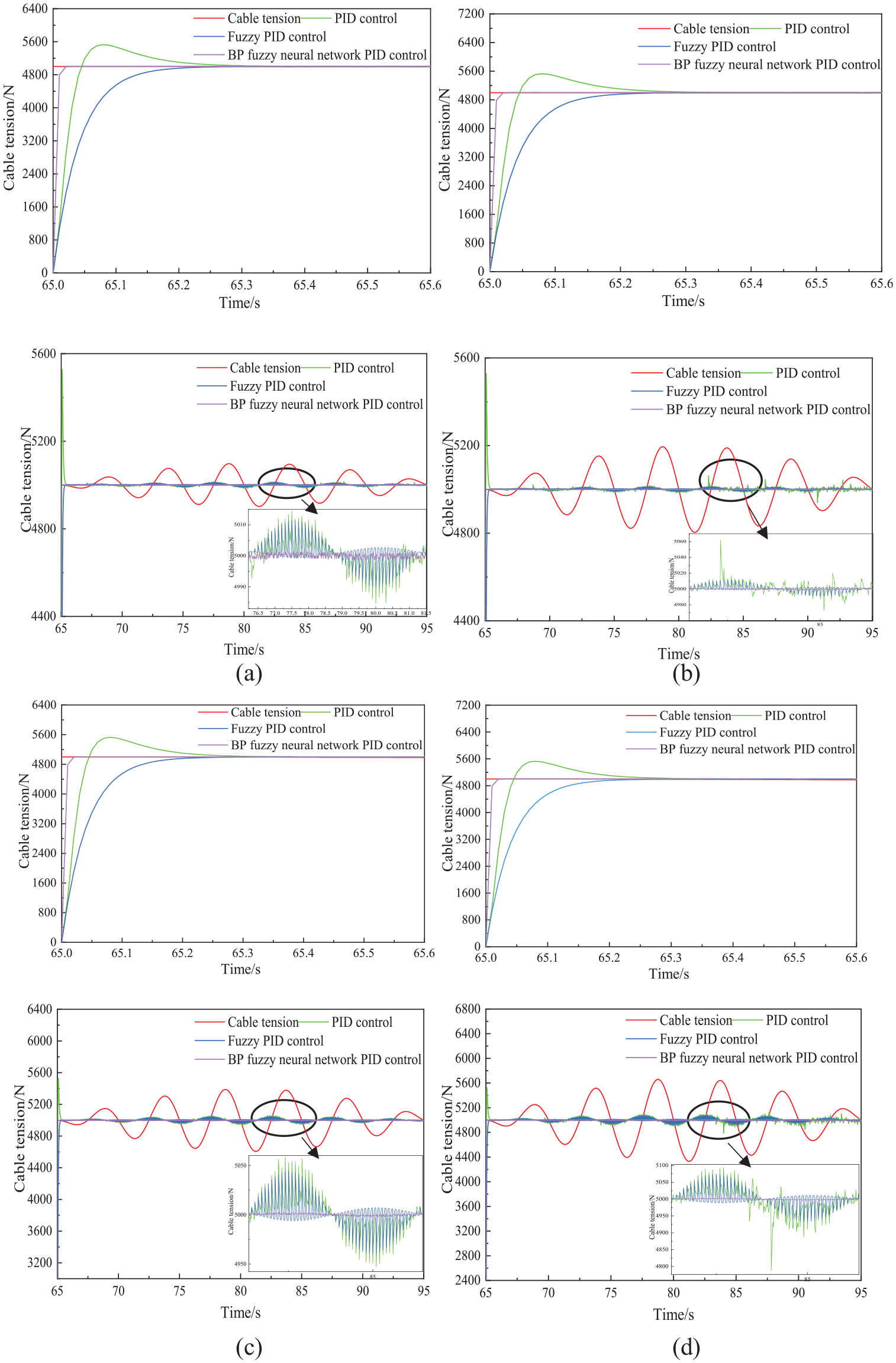
500 kg load constant tension control: (a) H = 0.5 m, (b) H = 1 m, (c) H = 2 m, and (d) H = 3.5 m.
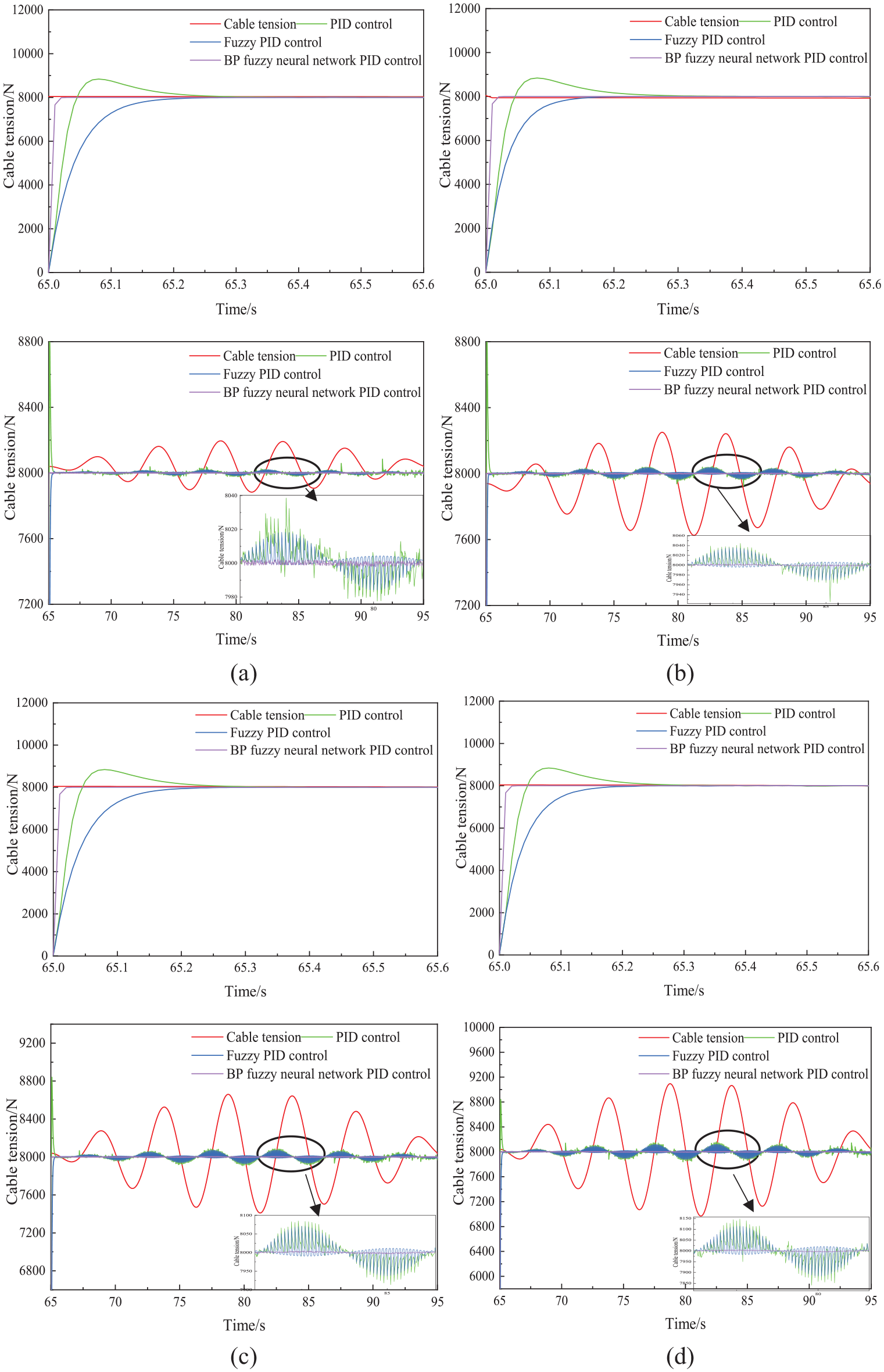
800 kg load constant tension control: (a) H = 0.5 m, (b) H = 1 m, (c) H = 2 m, and (d) H = 3.5 m.
It can be seen from the partially enlarged view in Figures 13 to 15 that when the traction winch is under constant tension control, the cable tension oscillation under the PID control of the traditional channel is particularly obvious. The traction winch under Fuzzy PID control is also oscillating, but the oscillation range is slightly smaller than that of PID control, and the adjustment time is also less than that of PID control. The constant tension control of the traction winch based on BP fuzzy neural network PID control has the best effect and the minimum amplitude of vibration. The range of tension oscillation is about −18 to 18 N. The result is obviously better than the traditional PID control and fuzzy PID control.
Finally, as shown in Figure 16, it shows the efficiency of constant tension control of traction winch cable under different loads and different wave heights by traditional PID controller, fuzzy PID controller, and BP fuzzy neural network PID controller. Among them, the efficiency of PID controller is basically between 88% and 91%, and the efficiency of fuzzy PID controller is between 91% and 95%. The efficiency of PID control based on BP fuzzy neural network is basically between 97% and 98.6%. Therefore, the established PID controller based on BP fuzzy neural network has the best efficiency.
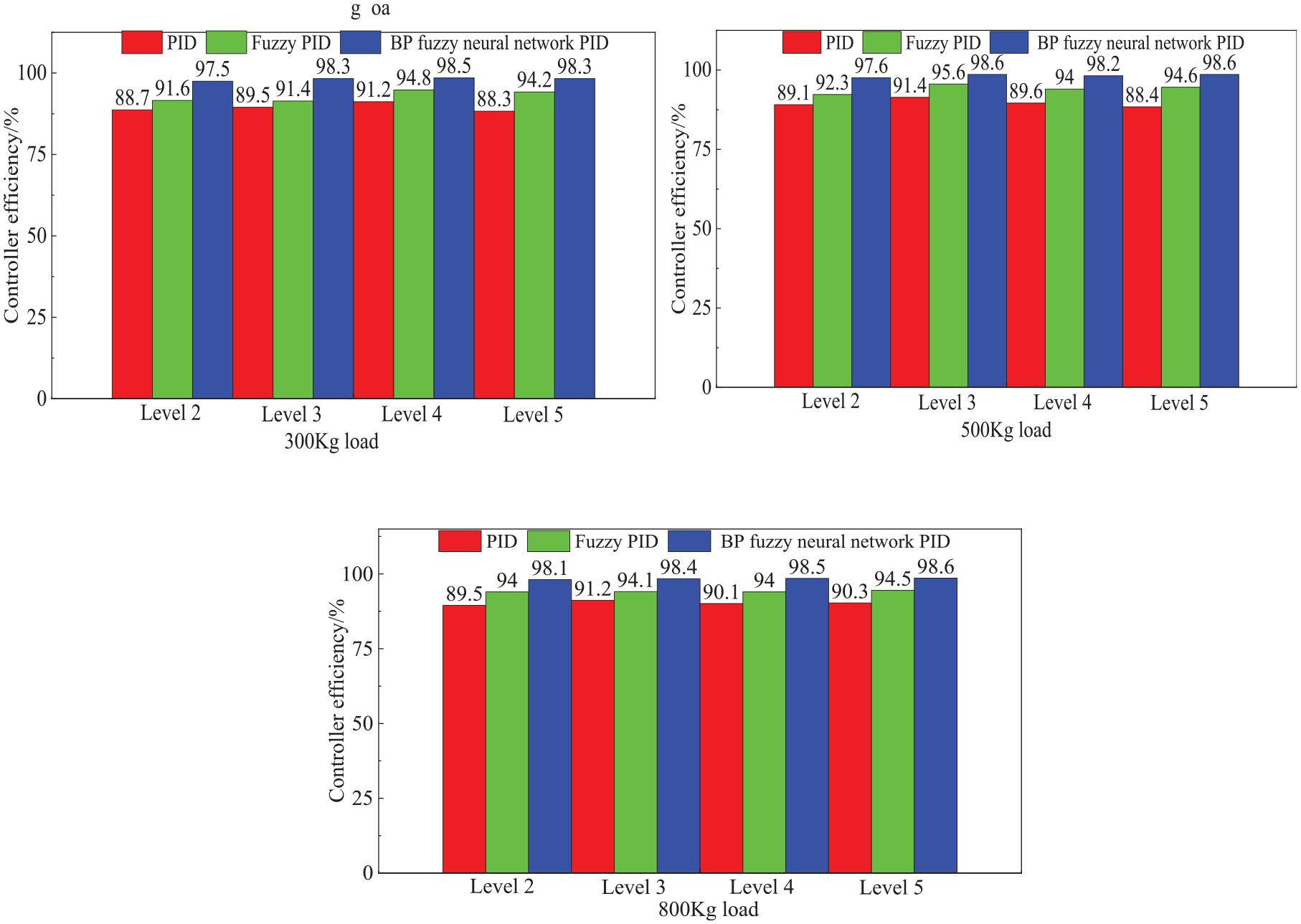
Controller efficiency under different loads and wave heights.
Conclusion
This article mainly studies the constant tension control of the traction winch cable. To prevent the cable from growing and decreasing in tension when the ship is heaving and sinking. And the cable itself stretches and shrinks, producing fatigue damage or breakage. Alternatively, cause the loss of load equipment, resulting in significant economic losses and other occurrences. As a result, a simulation model of constant tension control of the traction winch cable is established in this paper. The output torque of the traction winch is changed to ensure the stability of the cable tension during the lifting and sinking movement of the mother ship.
In terms of the control algorithm, a NARX neural network model was developed to predict the cable tension compensation value, as feedforward control of the system was required. The ship heave displacement data and cable tension compensation data under different loads and different levels of wave heights are collected. And they are used as training data and verification data of the NARX neural network. The results show that the prediction efficiency of the established NARX neural network model can reach more than 96.1%. Secondly, in terms of constant tension control for traction winch cable, a BP fuzzy neural network PID controller is established. And compared with traditional PID controller and fuzzy PID controller under different loads and different sea conditions. Among them, the efficiency of PID control based on the BP fuzzy neural network is about 98%. Therefore, the constant tension control of cable of BP fuzzy neural network PID traction winch has the fastest response, the most stable system, and the highest precision when the cable tension change.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.