
Abstract
Modern fighter aircraft have been designed to have high maneuverability in order to preoccupy strategic superiority in short-range air-to-air combat between fighter aircraft in warfare. Digital fly-by-wire flight control system design is aimed at providing good handling qualities for all mission task elements over the entire flight envelope. To provide both excellent gross acquisition and fine tracking compatibility, simultaneously for air-to-air combat maneuvers, this article presents a common longitudinal control law design of a task-dependent self-adjusting command-path pilot prefilter gain scheduler within the same control law design architecture and response type based on nonlinear dynamic inversion control. We perform the frequency- and time-domain analyses based on the mathematical model of T-50 advanced trainer aircraft to evaluate the basic flying qualities of the proposed control method. Furthermore, the pilot evaluation is performed to evaluate the gross acquisition and fine tracking capability for air-to-air tracking maneuvers in a handling quality simulator. The evaluation results reveal that the proposed control method improves the fine tracking capability without the degradation of gross acquisition.
Keywords
Introduction
A digital fly-by-wire (DFBW) flight control system (FCS) 1 using modern digital control technology is adopted to stabilize an unstable aircraft and attain adequate handling qualities in various mission task elements (MTEs). Consequently, the relaxed static stability (RSS) concept and the highly augmented DFBW FCS give a chance to optimize the handling qualities and enhance the performance in the entire flight envelope.
The concept of mission-oriented control law design for a particular task such as air-to-air and air-to-ground combat mission is motivated by task-dependent handling qualities. Generally, most of the fighter aircraft achieve mission-oriented requirements 2 for various tasks by designing various response types, which represented the aircraft response to control stick command in the control law. The F-16 Fight Falcon 3 was designed with normal acceleration in the up and away (UA) configuration and pitch rate in the power approach (PA) configuration as a response type of the longitudinal axis. But this aircraft did not apply the mission-oriented control design concept with a simplified design of response type. However, the high-performance fighters such as F-18 E/F Super Hornet, 4 F-22 Raptor, 5 and F-35A JSF (Joint Strike Fighter) 6 apply the mission-oriented control law design concept. Especially, the recently developed and operated F-35 has adopted various response types in consideration of various mission tasks such as conventional take-off and landing (CTOL) and vertical/short take-off and landing (V/STOL). The X-35B 7 designed pitch attitude and pitch rate at low-speed flight regimes, and normal acceleration and pitch rate at high speed and angle of attack as the response types of the longitudinal axis. These response types were defined in consideration of tasks such as air-to-air tracking, air-to-ground combat, semi-jet landing, and carrier landing.
The primary task of fighter aircraft is a short-range air-to-air combat, 8 which requires initial gross acquisition and continuous fine tracking tasks to track the target aircraft. The dynamic characteristics of the aircraft can be optimized and the air-to-air tracking capability can be enhanced by designing a FCS, considering these multi-stages in a short-range air-to-air combat and the handling qualities requirement.9,10 Modern highly maneuverable fighter aircraft are designed with a focus on achieving agility and fast gross acquisition capability, and the longitudinal flight control law employs a normal acceleration response type to produce the desired fast g-response with a significant pitch rate overshoot in a short-range air-to-air combat task. Therefore, a large transient pitch rate overshoot produces a fast angle-of-attack (AoA) change and a fast normal acceleration onset to achieve a faster turn rate. However, it requires the pilot extreme workload to perform fine tracking for a short-range air-to-air maneuver using the normal acceleration response type with significant pitch rate overshoot characteristics to achieve fast gross acquisition performance. In other words, it is very difficult to have adequate flying qualities to meet simultaneously both faster gross acquisition and better fine tracking in the air-to-air tracking task with the same response type and control law architecture.
To provide simultaneously both excellent gross acquisition and fine tracking compatibility in air-to-air combat maneuvers, this article proposes the task-dependent self-adjusting command-path pilot prefilter control gain scheduling method as a function of normal acceleration error between the desired and measured values based on nonlinear dynamic inversion (NDI) control using the T-50 supersonic trainer mathematical model. The T-50 supersonic trainer adopts the RSS concept and triplex FBW FCS to augment maneuverability and handling qualities. The pitch control is provided by all-moveable symmetric horizontal tail deflections. The roll control is provided by a combination of flaperon and differential horizontal tail deflections. A conventional rudder provides yaw control. The main contribution of this article can be summarized as follows. First, this control method provides simultaneously both excellent gross acquisition and fine tracking compatibility for an air-to-air combat maneuver within the same response type. Second, the control gain scheduling method is very simple by scheduling only the command-path pilot prefilter control gain instead of scheduling inner-loop and feed-forward control gains, as a function of normal acceleration error. Finally, the output of this control system to the input is predictable and consistent in comparison to traditional classical control schemes since control functions can be modularized by separating independently the control structure into the flying qualities portion and the airframe portion.
The rest of this article is organized as follows: Section “Relation between gross acquisition and fine tracking” describes an adequate response to achieve gross acquisition and fine tracking for the air-to-air tracking task. Section “Control law design” describes the control theory proposed in this study based on dynamic inversion (DI) and the design of the longitudinal desired dynamics including inner-loop, feed-forward, and command filter control gain for adequate flying qualities. Section “Analysis and pilot evaluation” describes the evaluation flight conditions and methods. Then, we present the results of the frequency-domain linear analysis, time-domain simulation, and real-time pilot evaluation based on the handling quality simulator (HQS) environment to assess the proposed control method. Finally, section “Conclusion” presents the conclusions and future plans.
Relation between gross acquisition and fine tracking
As mentioned earlier, most of the fighter aircraft select normal acceleration command as a response type to obtain fast gross acquisition and to produce the desired g-response with significant pitch rate overshoot to the control input. The aircraft have a fast turn rate with large fast pitch rate overshoot producing a fast AoA change and a normal acceleration onset. However, the pilot’s workload dramatically increases due to excessive pitch rate overshoot for the precision tracking flight stage while producing fast gross acquisition. The pilots, in flight test experience, tend to prefer a control system with a slow pitch rate response for the fine tracking stage, just like the zero dropback response type.
The pitch rate response has a measurable time lag in the real world. The pitch attitude response is not linear and not as predictable due to this time lag. So the pilot should release the control stick command in anticipation to precisely compensate for attitude error. This increases the pilot’s workload in the fine tracking stage. Figure 1 presents the relationship between gross acquisition and fine tracking aspect in view of pitch response characteristics to step control input and release the maneuver. The dashed line shows the significant fast pitch rate response with a positive dropback time to control input, and the pitch attitude response is even less predictable. These response characteristics lead to the degradation of fine tracking handling qualities due to “pitch bobble” for the air-to-air tracking task. Because of this, it is very difficult to capture the desired pitch attitude, and therefore the pilot’s workload is dramatically increased in the fine tracking stage. The solid line represents the deadbeat pitch rate response that has nearly zero dropback. When the pitch attitude dropback 11 is zero, the attitude time response tracks along the “K/s” line after the initial pitch rate is complete, and hence it is said that the nose of the aircraft exactly follows the control stick input. Therefore, the pilot workload is dramatically reduced to compensate for the desired pitch attitude since it is more predictable in the fine tracking stage.
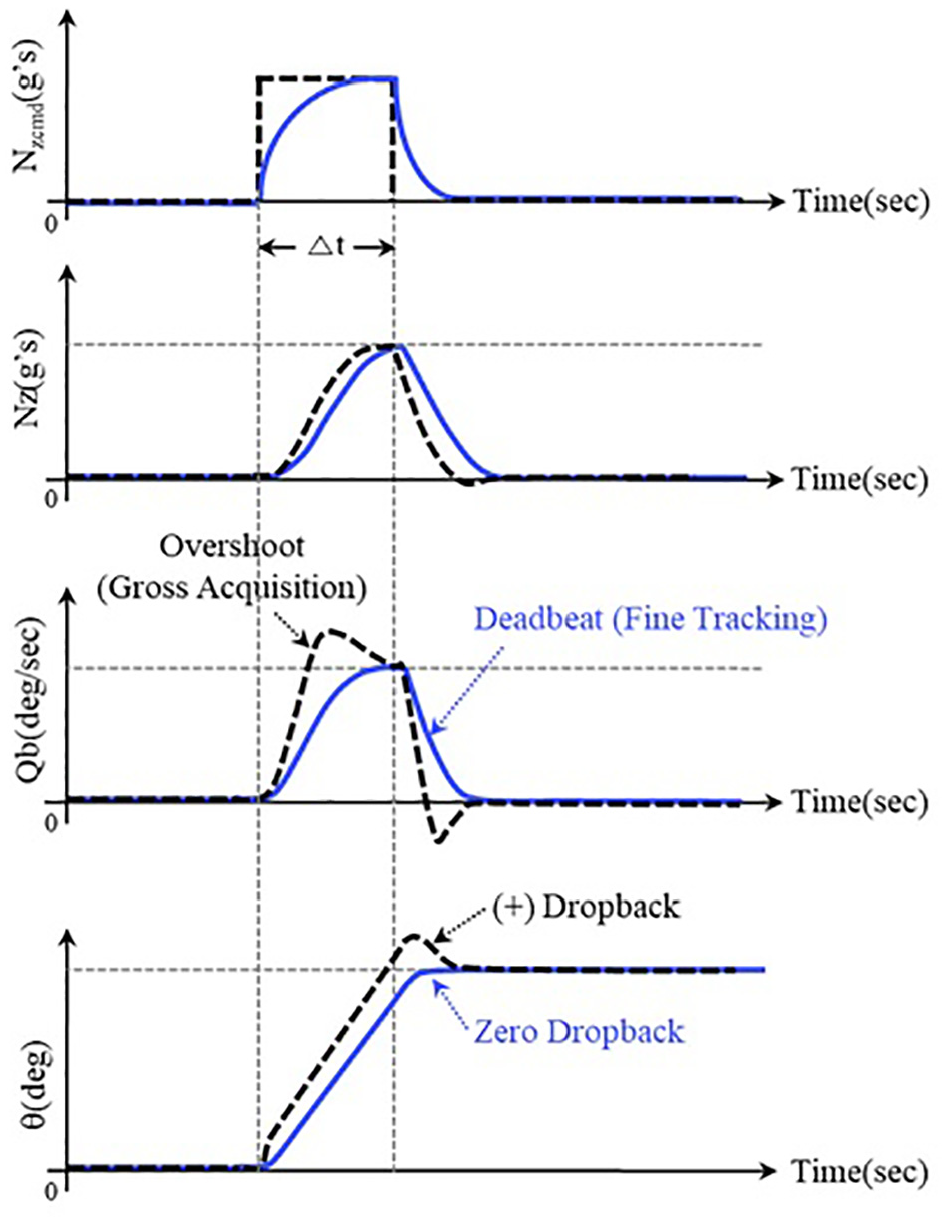
Relationship between gross acquisition and fine tracking.
Modern highly maneuverable fighters are designed with control systems to have a good gross acquisition capability. But the control system with a zero dropback pitch rate response tends to be unsatisfactory. It does not provide the high turn rate onsets for good gross acquisition or evasive maneuvering characteristics because control systems have a very slow normal acceleration response to the control input. Considering all of these design issues, we find that with just the existing control law design method it is very difficult to satisfy level 1 flying qualities for all the various tasks, that is, even if it is possible to meet level 1 flying qualities, it requires a lot of engineering efforts and costs at the phase of design and flight test.
Control law design
Recently, NDI has been extensively studied. The development of a model-based NDI algorithm in the aerospace industry started in National Aeronautics and Space Administration (NASA) with the participation of Honeywell, Boeing, and Lockheed Martin in early 1990s. The NDI as a viable control law methodology has been demonstrated in the only restricted flight envelope on various flight control research aircraft such as F-18 high angle-of-attack research vehicle (HARV), 12 X-38,13,14 X-36 reconfigurable control for tailless aircraft (RESTORE), 15 and X-35B short take-off/vertical landing (STOVL). 7 Furthermore, F-35 JSF 16 was the first production fighter incorporating the model-based NDI in entire flight envelopes. Moreover, NDI, which uses the measured angular acceleration and control surface positions as feedback parameters, was evaluated on vectored thrust aircraft advanced control (VAAC) Harrier in 1999.17,18 In 2000, NASA applied this control method to innovative control effector tailless aircraft. 19 Recently, Netherlands Aerospace Centre (NLR) and German Aerospace Center (DLR) with the Technical University of Delft have applied it to the Cessna 550 demonstrator 20 and proved the performance of the developed control law.
The control structure of the NDI control law shown in Figure 2 represents the decoupling between flying quality–dependent portions and airframe-dependent portions. The desired angular acceleration

Control structure of the NDI control law.
The nonlinear dynamic equation of motion can be expressed as

where

where

If we assume that

where

Consequently, the current control command

By substituting equation (5) into equation (3), the dynamic characteristics of the aircraft can be completely canceled, and the desired angular acceleration of the aircraft can be obtained as

Note also that if the exact aircraft model can be obtained, the desired dynamics that depend on the flying qualities requirements can also be designed without considering the aircraft dynamics. However, it is impossible to obtain the exact aircraft model due to several factors such as computational time delay and actuator and sensor dynamics in the control system. As these factors increase the order of the control system due to the complex models, they also increase the errors between the aircraft model and the flying qualities requirements represented in the first- or second-order models. This means that the flying quality parameters in desired dynamics must be adjusted based on the off-line optimization procedure to compensate for the uncertainties of aircraft dynamics.
DI
In general, longitudinal equations of motion can be expressed as

where

where

where

If the last term is ignorable in equation (11), the result is identical to the linear set of DI equations. Finally, inverting the above equation as well as applying the commanded, desired, and measured values gives the resulting NDI control

Desired dynamics
The part of desired dynamics can be divided into inner-loop control, feed-forward control, and command shaping filter to provide the desired stability and handling qualities of the aircraft. The architecture of the desired dynamics for the longitudinal axis is shown in Figure 3, where the response type for the longitudinal axis is selected as normal acceleration in focus of gross acquisition. Furthermore, desired dynamics are designed based on a proportional–integral (PI) type with normal acceleration and pitch rate as feedback variables. Moreover, the feed-forward control loop and command shaping prefilter are designed to improve the initial pitch angular acceleration and handling qualities while maneuvering. The flying quality parameters in desired dynamics are scheduled with Mach number and altitude to ensure a satisfactory level of flying qualities within all flight envelopes.

Desired dynamics of the longitudinal axis based on classical PI control.
Inner-loop control
From the closed-loop control structure in Figure 3, the desired angular acceleration can be expressed as

where
Short-period mode approximation of the longitudinal motion gives

where
Substituting equation (14) into equation (13), the following transfer function can be achieved

where Δ is the characteristic equation of the closed-loop system. To eliminate

where

Feed-forward control
From equation (16), equation (15) can be written as follows

Generally, the transfer function of the pitch angular velocity with respect to the control command can be summarized as equation (19) from the equation of the longitudinal axis of the aircraft


Command-path prefilter
The zeros of the control system are determined by the aerodynamic properties of the aircraft, and this does not affect the feedback system. However, the location of zero affects the handling qualities of the aircraft. Therefore, the locations of zeros are considered to obtain good handling qualities. Applying a pole-zero cancelation to equation (19) yields

where

This lead filter is designed in the pilot pitch command loop in order to improve the handling quality. Thus, equation (22) represents a command-path pilot prefilter. The control gain
To improve the fine tracking handling qualities without degrading gross acquisition, an additional pilot prefilter gain scheduler (Kpfnmult) is designed based on the normal acceleration error signal. Kpfnmult is a function of normal acceleration error (ΔG) between the pilot normal acceleration command
Analysis and pilot evaluation
Evaluation points and method
The representative flight conditions are airspeed 350 knots and 450 knots in altitude 20 kft for evaluating air-to-air tracking flying qualities.
As a method for evaluating flying qualities, frequency- and time-domain analyses were performed to evaluate quantitative criteria, 21 and the pilot evaluation was performed to evaluate qualitative aspects with Cooper–Harper Rating (CHR) 22 and pilot-induced oscillation (PIO) 21 criteria in an HQS environment. First, frequency-domain linear analysis is performed to evaluate longitudinal flying qualities in each case with pilot prefilter gains of 100% and 60%, that is, Kpfnmult of 1.0 and 0.6, respectively. Second, time-domain 6-DOF (degree-of-freedom) nonlinear simulation is performed to evaluate pitch rate and pitch attitude response with regard to dropback criteria to the control input in the same cases. Finally, air-to-air tracking and pitch capture maneuver are performed to evaluate gross acquisition and fine tracking handling qualities using self-adjusting command-path pilot prefilter control gain scheduling as a function of the normal acceleration error signal.
Frequency-domain linear analysis
In the frequency-domain linear analysis, there are the stability margin analysis and the flying qualities analysis. The stability margin analysis is performed to check the control system robustness against various uncertainties. The flying qualities specifications in the longitudinal axis are divided into two categories as the first-tier and the second-tier specifications as follows: The first-tier specifications are defined as key flight control and flying qualities design goals that drive the design optimization. 23 This specifications, for example, short-period mode damping and frequency, deal with the major modal analysis based on the LOES analysis technique. These specifications are evaluated at each iteration of the control law optimization and are guaranteed to be met during optimization design. The second-tier specifications are defined as a reference guideline. These specifications such as bandwidth and Neal–Smith criteria are evaluated only at the final phase of the optimization. The levels of flying qualities can be divided into levels 1, 2 and 3, where level 1 means the compliance with the design goals with satisfactory flying qualities. 21
Stability margin
Stability margins are required for the control law to allow various uncertainties in system dynamics such as mathematical modelling in defining the nominal system and plant, variations in dynamic characteristics caused by changes in environmental conditions, manufacturing tolerances, aging, wear, noncritical material failures, post-development phase aircraft modifications, and maintenance-induced errors in calibration, installation, and adjustment. To ensure the robust stability of an aircraft against various uncertainties, there have been proposed various standards that regulate the requirements of stability margin, for example, MIL-HDBK-516C 24 and MIL-DTL-9490E. 22 It is recommended to meet more than gain margin ±6 dB and phase margin ±45°. Stability margin is not affected by the magnitude of command-path prefilter gains since the stability margin of the control system is contributed by the inner-loop control law.
Figure 4 shows the bode plot in 350 knots and 450 knots at 20 kft flight conditions with 100% pilot prefilter gains. The phase crossover frequencies that determine the gain margins are 25.6 and 27.9 rad/s, and the gain crossover frequencies that determine the phase margins are 6.1 and 7.9 rad/s, respectively. It can be seen that the gain margins are 12.7 and 9.9 dB, and the phase margins are 59.4° and 68.2° in 350 knots and 450 knots at 20 kft altitude flight conditions. As an analysis result, the designed control system has robustness on various uncertainties by securing a sufficient stability margin.

Bode plot in 350 knots and 450 knots at 20 kft flight conditions with 100% prefilter gain.
LOES
In the frequency-domain linear analysis process, we applied zero of system chosen by the designer to LOES. That is, we choose Tθ2 of LOES as a value of the desired command-path prefilter gain. This method of analysis allows the designer to apply the desired handling qualities to the LOES analysis process. Table 1 shows the results of the LOES analysis for command-path prefilter gain variation. The LOES specification of MIL-STD-1797A includes short-period damping, short-period frequency, and equivalent pitch time delay criteria. 21 The LOES analysis results can be summarized as follows: short-period damping is 1.25 and 1.02; frequency is 3.8 and 4.4 rad/s in airspeed 350 knots and 450 knots at 20 kft flight conditions which satisfies the flying qualities level 1 boundary regardless of the magnitude of command-path prefilter gains because zero of the control system does not affect the feedback system. Furthermore, the numerator gain, Kq, decreases and zero of LOES moves to the left side as the command-path prefilter gain decreases. Therefore, the pitch rate response to the control input is close to the deadbeat shape and the response of pitch attitude shows nearly zero dropback.
Results of the low-order equivalent system analysis.

Bandwidth
The bandwidth defined as a handling qualities criterion is the high frequency at which the phase margin is at least 45° and the gain margin is at least 6 dB and provides the criteria for time delay resulting from phase delay in the high-frequency domain. 21 Figure 5 depicts the results of the bandwidth analysis for the variation of the command-path prefilter gain. In 350 knots and 450 knots at 20 kft altitude flight conditions, the pitch attitude bandwidth frequency decreases from 4.76 to 3.99 rad/s and from 5.26 to 3.90 rad/s, and the flight path bandwidth frequency decreases from 1.07 to 0.74 rad/s and from 1.40 to 1.06 rad/s, respectively, as the prefilter gain decreases from 100% to 60%. So the bandwidth frequency is relatively influenced by the variation of the command-path prefilter gain, but the time delay has only less influence on the variation of the prefilter gain. However, the results of the bandwidth analysis shows that open-loop pitch attitude or flight path response to pilot control input is within level 1 boundary in all flight conditions and command-path prefilter gains.
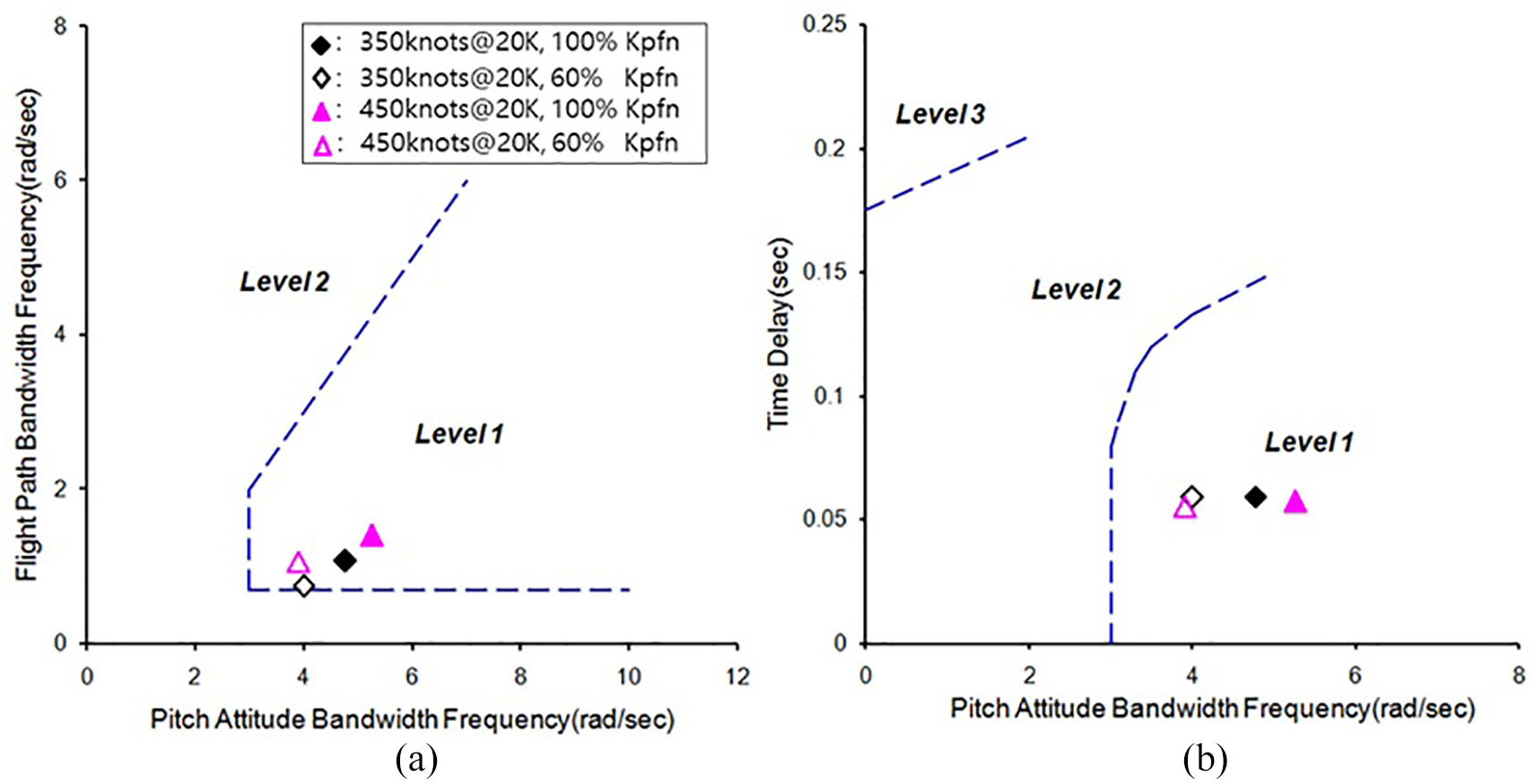
Results of the bandwidth analysis: (a) flight path response and (b) pitch attitude response.
Gibson and Neal–Smith criteria
Figure 6 shows the results of the analysis of Gibson phase rate and Neal–Smith θ/θcmd boundaries for variation of the command-path prefilter gain in each flight condition. The Gibson phase rate criterion concerns the open-loop attitude frequency response in the region around the −180° attitude phase and the average phase rate is derived from the excess phase lag between the PIO frequency and twice of that frequency. 25 As the prefilter gain decreases from 100% to 60%, the average phase rate decreases from 42.71°/Hz and 42.6°/Hz in 350 knots, and from 41.35°/Hz and 39.94°/Hz in 450 knots, and it has a little effect on decreasing prefilter gains in the analysis conditions. But the phase rate frequency decreases from 1.49 to 1.40 Hz and from 1.82 to 1.67 Hz as the prefilter gain decreases and it somewhat affected the handling qualities. The Neal–Smith closed-loop criterion including a simple pilot model with gain, lead/lag compensation, and time delay components was originally developed for highly augmented fighter aircraft performing precision pitch attitude tracking tasks. 26 The pilot’s lead compensation significantly increases from 25.57° to 36.65° in 350 knots and from 24.05° to 37.02° in 450 knots as the prefilter gain decreases, but the resonant peak has a little effect around the value of 2.0 dB. As a result of the analysis, the Gibson phase rate and Neal–Smith criteria still meet the level 1 flying qualities as the prefilter gain varies.
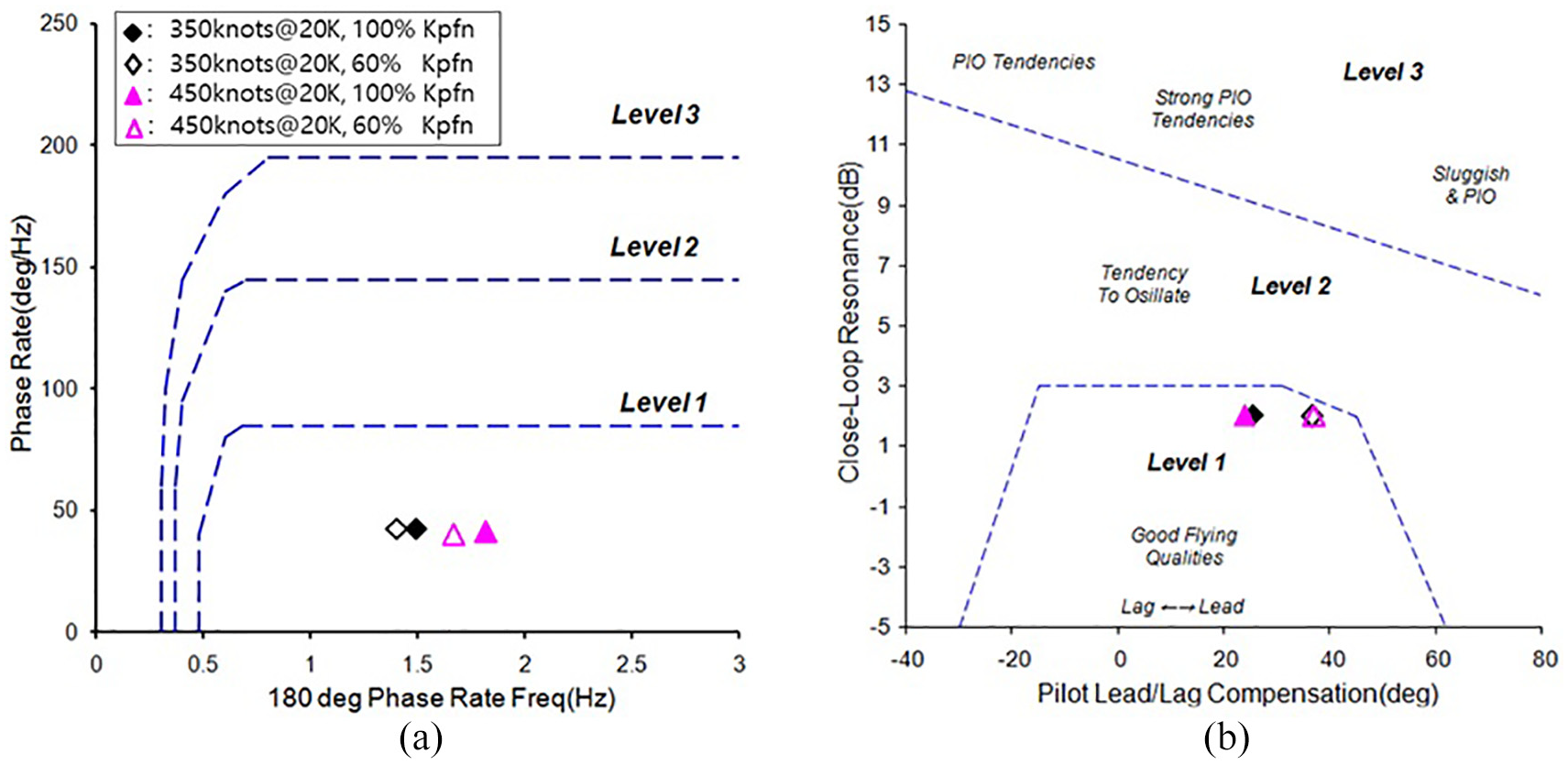
Results of the Gibson and Neal–Smith analysis: (a) Gibson average phase rate and (b) Neal–Smith θ/θcmd boundaries.
Time-domain nonlinear simulation
This section presents the results of evaluating the proposed control law by performing nonlinear 6-DOF simulation in view of Gibson dropback time criterion. A spike and step inputs are the simplest input types to evaluate the time-domain response. The parameters that are usually evaluated in short-period time responses are AoA, pitch acceleration, pitch rate, pitch attitude, flight path angle, and so on.
Figure 7 shows the time response to spike input with a magnitude of 1g and a duration of 0.2 s with prefilter gain variation. The solid line and diamond shape indicate the analysis results with 100% prefilter gain, and the dashed line and diamond shape in white color indicate the analysis results with 60% prefilter gain. As the prefilter gain decreases from 100% to 60%, the steady-state pitch rate (qss) decreases from 0.1°/s to 0.066°/s, the pitch rate response peak (qpk) decreases from 0.15°/s to 0.1°/s, and the overshoot of pitch attitude peak (Δθpk) decreases from 0.07° to 0.0016° in the 350 knots flight condition. Moreover, the response of pitch rate (qpk/qss) and pitch attitude (Δθpk/qss) decrease so that the shape of the pitch attitude response shows is deadbeat as the prefilter gain decreases from 100% to 60%. As a result of the simulation, flying qualities still meet the level 1 boundary with prefilter scheduling variation.

Dropback time response to spike input at airspeed 350 knots and altitude 20 kft: (a) pitch attitude dropback, (b) pitch rate response, and (c) pitch attitude response.
Figure 8 depicts the time response to step control input at 100% and 60% of the prefilter gain. The solid line indicates the simulation result with 100% prefilter gain and the dashed line indicates the simulation result with 60% prefilter gain. As the prefilter gain decreases from 100% to 60%, the pitch rate response is close to deadbeat type without overshoot and the pitch attitude response takes the form of zero dropback time. Therefore, at 60% of prefilter gain, the pilot can easily control the aircraft in the fine tracking stage because the pilot can predict the desired pitch attitude by control input, but gross acquisition performance degrades in the build-up stage of normal acceleration for initial target tracking.

Dropback time response to step input with 100% and 60% pilot prefilter gain at airspeed 350 knots and altitude 20 kft.
Handling qualities evaluation
HQS environment
Figure 9 shows real-time HQS 27 of the T-50 supersonic trainer to qualitatively evaluate the handling qualities. This equipment provides the environment for the pilot-in-the-loop flying qualities evaluation and development control law. This facility is composed of cockpit, host computer, image generator (IG), signal interface unit (SIU), visual display, ETS (engineering test station), and so on. Especially, the host computer includes databases such as aerodynamic, propulsion, hinge moment, and mass properties and various subsystem models such as flight control law, landing gear, sensors, actuator, and so on. The host computer which uses six high-performance central processing units (CPUs) and 1.5 GB memory provides external I/O data related to the 6-DOF aircraft model. The video mixer adds the head-up display (HUD) information to the terrain database provided by the IG and provides it to a display monitor for each channel. The SIU provides the hardware input signal of the aircraft to the host computer, and provides signals, such as initial settings signal required by the host computer and the output signal of the aircraft modeling module, to the hardware equipment. The simulation program of the host computer is written in FORTRAN and C languages, and it simulates the control module using multiple CPUs. The control module is operated at 64 Hz and receives its inputs from the control panel and modeling modules. The flight control computer uses a C4000 series CPU from TI, has a triplex structure, and is designed to check the status between CPUs. The aircraft signal provided by the host computer is transformed to an electrical signal required by the flight control computer through the ETS and then transmitted to the flight control computer.

Schematic of the real-time handling quality simulator (HQS) environment. 27
Maneuver description
Figure 10 shows the concept of gross acquisition and fine tracking in the air-to-air combat tracking maneuver. 28 This task is designed to generate quantitative and qualitative handling qualities data by the pilot achieving initial target tracking and maintaining fine tracking solution. This task is broken into a gross acquisition stage and a fine tracking stage and can be used to evaluate the overall longitudinal and lateral flying qualities and reveal potential PIO tendencies of an aircraft in a violent maneuver with a moderate AoA. The maneuvering method of this task is as follows: First, the target aircraft begins with a level flight whose heading is perpendicular to that of the test aircraft. After passing above the test aircraft, the target begins a specified normal load factor level turning into the test aircraft. Second, at the same time, the pilot rolls and pulls the test aircraft into the target maneuver plane and aggressively to acquire the target aircraft within a desired mil reticle. Finally, after the initial capture is completed, the maneuver requires the pilot to push the test aircraft to unload rapidly and laterally track the target aircraft while reversing the roll attitude. After achieving enough fine tracking time, the pilot unloads the test aircraft to break off the task.

Concept of the air-to-air tracking maneuver. 28
Pilot evaluation results
To evaluate the gross acquisition and fine tracking performance with the pilot prefilter scheduler, pilot evaluation was performed in the combined air-to-air tracking maneuver with the F-16 target aircraft in the HQS environment.
Figure 11 shows the evaluation results of the combined air-to-air tracking maneuver with or without the pilot prefilter gain scheduler in 350 knots, 20 K, UA, and clean loading configuration. The dotted line represents the evaluation results with 100% prefilter gain and the solid line represents the evaluation results with pilot prefilter scheduling as an incremental normal load factor. The F-16 target aircraft begins level turn with 3g normal load factor into the test aircraft after passing above the test aircraft.

Results of pilot evaluation for the air-to-air tracking maneuver at airspeed 350 knots and altitude 20 kft.
The F-16 target aircraft turns toward the tracker and conducts a level turn at the 3g normal load factor at the 350 knots airspeed. At the same time, the tracker immediately rolls toward the target aircraft and attempts to bring the target within the HUD field-of-view as quickly as possible. This maneuver is followed by a rapid roll reversal by the tracker in order to get established in the same turning plane as the target aircraft. The gross acquisition flight phase is completed when the target aircraft is stable within a ±50 mil circle of the piper. Pilots gave the longitudinal handling qualities level 1 with an average CHR of 1 for gross acquisition and there are no different flight characteristics between with and without the pilot prefilter gain scheduler. Also, there is not PIO tendency with PIO rating 1. After the gross acquisition is completed, the pilot tracks the target aircraft precisely using small control inputs to keep the target aircraft within the desired mil reticle.
When the pilot prefilter gain scheduler is not applied, the pilot uses pitch control input with 14.1-lbs increments in the range of 15.81–1.73 lbs to track the target aircraft and the pitch rate response shows 11.5°/s increments in the range of 12.5°/s–1.0°/s with a 3g normal load factor boundary. The pilot comment is such that pitch control is very difficult due to the “pitch bobble” tendency with a fast pitch rate response. That is, it is difficult to keep the target aircraft within ±17 mil of the aim point (the aim point remains within an imaginary circle half way between the inner and outer circles) and predict normal acceleration and pitch rate response. Pilots give the longitudinal handling qualities a level 2 with an average CHR of 5 for fine tracking.
When the pilot prefilter gain scheduler is applied, the pitch bobble tendency decreases dramatically and fine tracking is improved. The increment of the pitch control input decreases from 14.1 to 11.64 lbs between 14.14 and 2.5 lbs compared to when the pilot prefilter scheduler is not applied. Above all, the magnitude of pitch rate is between 9.25°/s and 3.2°/s and the increment of pitch rate response decreases 47% from 11.5°/s to 6.1°/s. The pilot comments that the pitch rate and normal load factor response to the control input are very predictable. Therefore, it is easy to keep the target aircraft within ±10 mil of the aim point (the aim point remains within the inner circle). Pilots give the longitudinal handling qualities a level 1 with an average CHR of 3 for fine tracking. Also, basic handling qualities do not degrade in the pitch attitude capture maneuver.
The results of the analysis and pilot evaluation means that the pilot prefilter gain scheduler with incremental normal acceleration improves the fine tracking performance without degrading the gross acquisition and basic handling qualities.
Conclusion
The modern fighter aircraft should have a high maneuverability and good handling qualities for various mission tasks to preoccupy strategic superiority in the air-to-air combat between fighter aircraft in warfare. To achieve these flight characteristics, the aircraft employs the RSS concept to improve the aerodynamic performance and the DFBW FCS concept to provide adequate handling qualities in various MTEs. But the FCS without adopting the task-tailoring design concept does not provide adequate handling qualities in various tasks such as air-to-air combat maneuver that must satisfy simultaneously both gross acquisition and fine tracking characteristics. This article proposes a new control concept based on NDI control, which has the control law design architecture of the task-dependent self-adjusting command-path pilot prefilter gain scheduler based on normal acceleration error. It has some advantages in handling qualities without increasing control system complexity. The proposed control method provides simultaneously both excellent gross acquisition and fine tracking capability within the same response type in air-to-air combat maneuvers. Therefore, the control structure is very simple because inner-loop and feed-forward command control gains are not varied except for pilot prefilter gain as a function of normal acceleration error. As a result of the evaluation, the pilot can control the aircraft more easily since the pitch rate response for control input is predictable in deadbeat type in the fine tracking stage so that it improves the fine tracking handling qualities without degrading gross acquisition. The longitudinal handling qualities are improved from level 2 to level 1 with an average CHR of 3 for fine tracking and a CHR of 1 for gross acquisition when the self-adjusting command-path pilot prefilter scheduling is applied.
Footnotes
Appendix 1
Acknowledgements
The authors would like to deliver their sincere thanks to the editors and anonymous reviewers.
Handling Editor: James Baldwin
Data availability
This publication is supported by multiple datasets of in-house development of the aircraft program.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.