An adaptive H-infinity tracking control is proposed for a z-axis microgyroscope with system nonlinearities. All the signals can be guaranteed in a bounded range, and tracking error is uniformly ultimately bounded, an H-infinity tracking performance is also achieved to a prescribed level. Adaptive control methodology is integrated with H-infinity control technique to achieve robust adaptive control, and adaptive algorithm is used to estimate the unknown system parameters. Simulation studies for microgyroscope are conducted to prove the validity of the proposed control scheme with good performance and robustness.
Microgyroscope is the basic measurement element in the inertial navigation system, and it can also be used in military, aviation, aerospace, bioengineering, and other fields. Some control methods such as robust adaptive control,1–4 backstepping control,5 sliding mode approaches,6,7second-order sliding mode control and super twisting sliding mode controller,8–13 adaptive fuzzy and neural control approaches,14–21 and so on have been investigated to control the dynamic systems.
control is used to attenuate the effect on the tracking error caused by system nonlinearities and treat the robust stabilization and disturbance rejection problems.22–26 An adaptive H-infinity sliding mode tracking control is proposed for a class of nonlinear MIMO systems in Chang.22Ma et al.24 put forward a compact H-infinite robust rebalance loop controller with application to an electrostatically suspended microgyroscope. Fei et al.26 developed an LMI-based adaptive fuzzy H-infinity control strategy for microgyroscope. Adaptive H-infinity control methods have been developed in previous works27–29 for some dynamic systems.
This article focuses on the adaptive robust sliding mode control strategy of microgyroscope. The adaptive sliding mode control is combined with the control to guarantee the Lyapunov stability and robust tracking, which could better accommodate the microgyroscope system in the three steps. Adaptive system is used to learn the unknown dynamics, robust compensator is designed to attenuate the effect of system nonlinearities and external disturbance, and robust control is utilized to achieve the H-infinite tracking performance. The technical contributions compared with current works can be claimed as follows:
The adaptive control and control strategies are developed to attenuate the tracking error to a prescribed level in order to achieve the control performance. The control technique is added to adaptive controller to achieve the desired attenuation of disturbance in a microgyroscope.
control is employed to adaptively approximate and compensate the system nonlinearities. Riccati-like equation method is incorporated with the adaptive control to approximate the nonlinear function to compensate the system nonlinearities.
shows a schematic diagram of a microgyroscope. The motion equations of microgyroscope are developed from the Lagrange–Maxwell equation19
where is the Lagrange’s function; and are kinetic and potential energies of the sensitive element, respectively; are the generalized damping forces; and are generalized forces acting on the sensitive element. In this article, .
Assuming that the angular velocity is almost constant over a sufficiently long time interval, , only the component of the angular velocity causes a dynamic coupling between the x–y axes. Considering fabrication imperfections, the system model is obtained as
where is a mass; are damping and spring coefficients; are quadrature errors, that is coupled damping and spring terms; are control forces; and are bounded disturbances.
Dividing both sides of equation (2) by reference mass , reference length , and natural resonance frequency obtains
The control target for microgyroscope is to make the proof mass to oscillate at given frequency and amplitude: , . Then, the reference trajectory can be redefined as
where , .
Problem formulation
Taking into account the uncertain parameters in the microgyroscope system, the system model is expressed as
where is the unknown uncertainties of the matrix , is the unknown uncertainties of the matrix .
The control objective is to design an adaptive controller for the microgyroscope systems (equation (6)) with system nonlinearities; all the signals and states are bounded, and the output tracking error is as small as possible, as well as the following tracking performance should be achieved
where the weighting matrices , , tracking error , adaptive gain , and is a prescribed attenuation level.
So, the derivative of the tracking error is written as
where , , , , , and i = 1, 2.
Then, we choose a matrix K, which makes stable. The form of matrix is with for i = 1, 2. We rewrite the error equation (12) as
where .
Adaptive tracking controller
The schematic diagram of adaptive controller for a microgyroscope is designed in Figure 2
The schematic diagram of adaptive H-infinity controller.
, and the tracking error comes to the proposed controller. The designed controller has three parts, adaptive system is used to learn the unknown dynamics, robust compensator is developed to attenuate the effect of uncertainties and disturbance, and robust control is utilized to achieve the H-infinity tracking performance.
The can be expressed as , in which is the matrix form of system parameters, denotes the uncertain parts of external disturbances. The unknown system parameter vector is
Then, we can obtain that
Substituting into equation (12) yields the error equation
Let be the estimated error where is the estimated value of .
Consider the microgyroscope dynamics (equation (6)), if there is a symmetric matrix satisfying the following Riccati-like matrix equation
where is controller gain.
Then, the adaptive control law
guarantees that the tracking performance (equation (7)) can be obtained; if , then the tracking error is uniformly ultimate bounded; all the variables in the closed-loop system (equations (6) and (15)) are bounded, where is used to obtain the tracking performance, is used to reduce the impact of external disturbance , adaptive law .
Substituting equation (17) into equation (15) yields
We choose a Lyapunov function candidate as
Making the time derivative of obtains
Then, substituting control force into equation (20), we can obtain
because
Applying the sliding term and adaptive law into equation (21), and substituting equation (22) into equation (21), it can be written that
Since , the inequality (equation (24)) implies the following inequality
Thus, the tracking performance (equation (7)) can be achieved.
From equations (18) and (25), all the variables in the closed-loop system (equations (6) and (15)) are bounded. Moreover, it is proved if , then the tracking error is uniformly ultimate bounded.
Simulation examples
In this section, we will use MATLAB/Simulink to evaluate the proposed adaptive tracking control on the lumped microgyroscope model. Parameters of microgyroscope17,18 are listed as
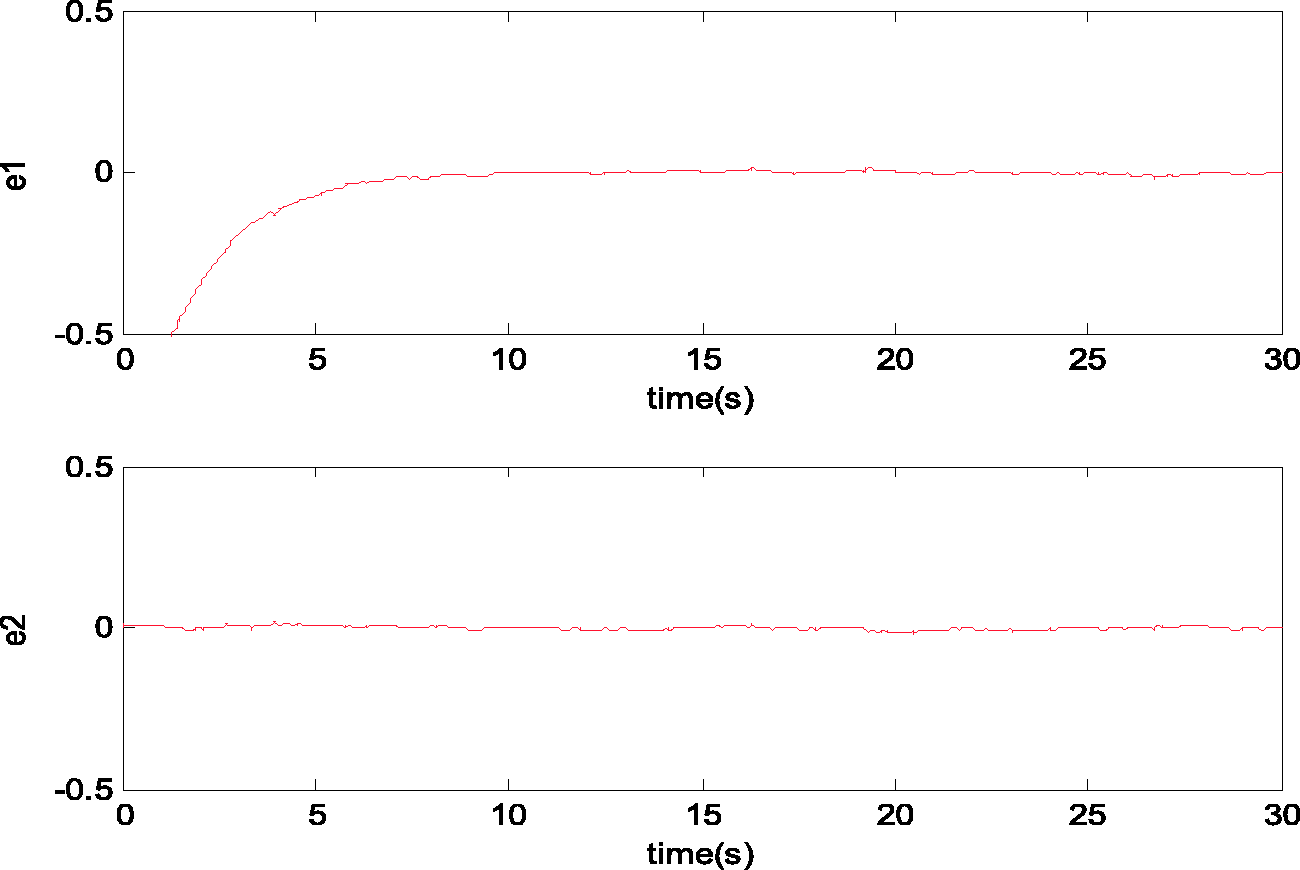
The desired trajectories are , where , . The matrix K is chosen as ; the adaptive gain , other parameters are , respectively. The weight matrix . The combination of uncertainty and external disturbances can be chosen as and , respectively, in x and y axes. Then, we will testify the robustness of the proposed algorithm by increasing the value of to 20 times of and .
The tracking trajectory and tracking error are shown in Figures 3
The tracking trajectory using adaptive H-infinity controller.
Convergence of the tracking error using adaptive H-infinity controller in the presence of large disturbance.
are the tracking trajectory and tracking error when increasing to 20 times, showing that no matter how much external disturbances increase, the controller can track the reference model trajectory accurately, and guarantee the tracking error converges to zero.
Remark
The design parameters have influences on the control performance. The parameters of micro gyroscope system are selected from the references.7,20 The parameters are selected by previous works20,24 and experiences. The trajectory tracking resolution and robustness could be improved using the design adaptive H-infinity controller which could utilize adaptive system, robust compensator, and robust control to improve the tracking performance.
As for practical application, since it is not easy to establish accurate model of microgyroscope because of its nonlinearity and coupling, so it has a great potential to apply control to MEMS gyroscope. The control has strong robust ability for nonlinear term, so it can be applied to nonlinear microgyroscope systems. Because the reference trajectories contain two different nonzero frequencies, PE condition is satisfied, in Figure 7
Adaptive parameter estimates.
, the parameter estimates converge to their true values including the angular velocity.
Conclusion
In this article, control technique is added to adaptive control algorithm to obtain the desired disturbance attenuation of microgyroscopes. A robust compensator is developed to attenuate the effect of system nonlinearities to a prescribed level so as to obtain the performance. Adaptive control is employed to achieve robust adaptive control, and adaptive law is used to estimate the unknown system parameters. Simulation results confirm that the performance can be obtained by the proposed strategy, demonstrating the accurate tracking property and strong robustness. Further works include real implementation of the proposed control scheme.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Science Foundation of China under Grant No. 61873085.
Footnotes
Handling Editor: James Baldwin
References
1.
ParkRHorowitzRHongS, et al.
Trajectory-switching algorithm for a MEMS gyroscope. IEEE T Instrument Meas2007;
56: 2561–2569.
2.
Apostolyuk V. Theory and design of micromechanical vibratory gyroscopes. In: Leondes C.T. (ed.) MEMS/NEMS. Boston, MA: Springer, 2006, pp.173–195.
3.
Montoya-CháirezJSantibáñezVMoreno-ValenzuelaJ.
Adaptive control schemes applied to a control moment gyroscope of 2 degrees of freedom. Mechatronics2019;
57: 73–85.
4.
WangWZhaoQ.
Adaptive perturbation compensation for micro-electro- mechanical systems tri-axial gyroscope. Contr Theor Appl2014;
31: 451–457.
5.
FangYFeiJYangY.
Adaptive backstepping design of a microgyroscope. Micromachines2018;
9: 338.
6.
FeiJChenY.
Dynamic terminal sliding mode control for single-phase active power filter using double hidden layer recurrent neural network. IEEE T Power Electr. Epub ahead of print 17 February 2020. DOI: 10.1109/TPEL.2020. 2974470
7.
FeiJLiangX.
Adaptive backstepping fuzzy-neural-network fractional order control of microgyroscope using nonsingular terminal sliding mode controller. Complexity2018;
2018: 5246074.
8.
MobayenSTchierF.
A novel robust adaptive second-order sliding mode tracking control technique for uncertain dynamical systems with matched and unmatched disturbances. Int J Contr Autom Syst2017;
15: 1097–1106.
9.
HaghighiDMobayenS.
Design of an adaptive super-twisting decoupled terminal sliding mode control scheme for a class of fourth-order systems. ISA T2018;
75: 216–225.
10.
MobayenSTchierF.
Robust global second-order sliding mode control with adaptive parameter-tuning law for perturbed dynamical systems. Trans Inst Meas Contr2018;
40: 2855–2867.
11.
MobayenSTchierF.
An LMI approach to adaptive robust tracker design for uncertain nonlinear systems with time-delays and input nonlinearities. Nonlin Dynam2016;
85: 1965–1978.
12.
FeiJFengZ.
Adaptive fuzzy super-twisting sliding mode control for microgyroscope. Complexity2019;
2019: 6942642.
13.
FeiJFengZ.
Fractional-order finite-time super-twisting sliding mode control of micro gyroscope based on double loop fuzzy neural network. IEEE T Syst Man Cyber: Syst. Epub ahead of print 25 March 2020. DOI: 10.1109/TSMC.2020.2979979
14.
FeiJZhouJ.
Robust adaptive control of MEMS triaxial gyroscope using fuzzy compensator. IEEE T Syst Man Cyber B: Cyber2012;
42: 1599–1607.
15.
FeiJLuC.
Adaptive sliding mode control of dynamic systems using double loop recurrent neural network structure. IEEE T Neural Netw Learn Syst2018;
29: 1275–1286.
16.
ChuYFeiJHouS.
Adaptive global sliding mode control for dynamic systems using double hidden layer recurrent neural network structure. IEEE T Neural Netw Learn Syst2019;
31: 1297–1309.
17.
FangYFeiJCaoD.
Adaptive fuzzy-neural fractional-order current control of active power filter with finite-time sliding controller. Int J Fuzzy Syst2019;
21: 1533–1543.
18.
ZhuYFeiJ.
Disturbance observer based fuzzy sliding mode control of PV grid connected inverter. IEEE Access2018;
6: 21202–21211.
19.
FeiJChuY.
Double hidden layer recurrent neural adaptive global sliding mode control of active power filter. IEEE T Power Electr2020;
35: 3069–3084.
20.
HouSFeiJ.
A self-organizing global sliding mode control and its application to active power filter. IEEE T Power Electr2019;
35: 7640–7652.
21.
FeiJWangH.
Experimental investigation of recurrent neural network fractional-order sliding mode control of active power filter. IEEE T Circuits Syst. Epub ahead of print 12 November 2019. DOI: 10.1109/TCSII.2019.2953223
22.
ChangY.
An adaptive H-infinite tracking control for a class of nonlinear multiple-input-multiple-output. IEEE T Autom Contr2001;
46: 1432–1437.
23.
YangGYeD.
Adaptive reliable H∞ filtering against sensor failures. IEEE T Sig Process2007;
55: 3161–3171.
24.
MaGChenWZhangW.
Compact H-infinite robust rebalance loop controller design for a micromachined electrostatically suspended gyroscope. ISA T2010;
49: 222–228.
25.
ChoiH.
LMI-Based sliding surface design for integral sliding mode control of mismatched uncertain systems. IEEE T Autom Contr2007;
52: 736–742.
26.
FeiJJuanWXinM.
Adaptive fuzzy H-infinite control strategy for MEMS gyroscope based on linear matrix inequality. Proc IMechE, Part I: J Systems and Control Engineering2012;
226: 1039–1049.
27.
KhailH.
Adaptive output feedback control of nonlinear systems represented by input-output models. IEEE T Autom Contr1996;
41: 177–188.
28.
SunLTongSLiuY.
Adaptive backstepping sliding mode H-infinite control of static var compensator. IEEE T Contr Syst Tech2011;
19: 1178–1185.
29.
YangGYeD.
Reliable H-infinite control of linear systems with adaptive mechanism. IEEE T Autom Contr2010;
55: 242–247.