
Abstract
In this paper, a neural sliding mode control approach is developed to adjust the sliding gain using a radial basis function (RBF) neural network (NN) for the tracking control of Microelectromechanical Systems (MEMS) triaxial vibratory gyroscope. First a sliding mode control with a fixed sliding gain is proposed to assure the asymptotic stability of the closed loop system. Then a RBF neural network is derived to adjust the sliding gain using a gradient method in a switching control law. With the adaptive sliding gain using the learning function of RBF neural network, the chattering phenomenon is eliminated. Numerical simulation is investigated to verify the effectiveness of the proposed neural sliding mode control scheme.
Introduction
As an important measuring element and inertial navigation instrument, micro gyroscope is commonly used to measure angular velocity in navigation system, automobile, etc. Because of the design and manufacture errors and the influence of temperature and operating environment, the resonant frequency of micro gyroscope will change and the vibration amplitude of micro gyroscope will be unstable. The difference between the original characteristics and design will decrease the quality of the gyroscope. The measurement of angular speed and the compensation of manufacturing error have become the main control problem in the micro gyroscope. However, the traditional control method mainly solves the stability control of oscillation amplitude and frequency of driving shaft and the matching problem of two-axis frequency. It cannot effectively solve the shortcomings and defects of micro gyroscopes. Many advanced intelligent control scheme have been applied to the control of micro gyroscopes for improving the accuracy and sensitivity. Recently, researchers developed advanced control approaches to control the MEMS gyroscopes.1–5
Sliding mode controller (SMC) is a nonlinear control strategy with strong robustness.6–8 Terminal sliding mode controllers and super-twisting sliding mode controller have developed for PMSM drives and microgyrosocpe.9–11 Recently, intelligent control approaches such as neural network and fuzzy control have been investigated.12–14 The universal approximation theorem indicates that the fuzzy system is a new universal approximator in addition to polynomial function approximators and neural network approximators. Because the universal approximation theory of fuzzy system and neural network can approximate any nonlinear model and realize arbitrary nonlinear control law, they are widely used in the control systems. An adaptive fuzzy sliding mode control scheme was developed for robot manipulator. 15 Lewis et al. 16 developed a neural network approach for a robot manipulator. Lin and Wai 17 proposed a sliding-mode-controlled slider-crank mechanism with a fuzzy neural network controller. Lin et al. 18 employed a neural network based robust nonlinear control for a magnetic levitation system. Some neural network sliding mode control approaches have been developed for robot manipulators.19–21 Barić et al. 22 presented a neural network-based sliding mode controller for an electronic throttle. Javadi Moghaddam et al. 23 developed a neural network-based sliding-mode control for rotating stall and surge in axial compressors. Duwaish and Hamou 24 proposed a neural network based adaptive sliding mode controller for a power system stabilizer. Neural controller and fuzzy controller have been widely used in identification and control for several dynamic systems.25–29
In the sliding mode control (SMC), the bound of uncertainties must be available in advance. Lin et al. 18 proposed an adaptive fuzzy sliding mode control to estimate the upper bound of uncertainties for a permanent-magnet synchronous motor drive. This paper proposed a sliding mode controller whose sliding gain can be updated online using a RBF neural network scheme.
The contribution of this paper can be highlighted as:
The requirement of the upper bound of model uncertainties and external disturbances must be known is relaxed by RBF sliding gain adjustment, therefore the information of such upper bound does not need to be known in advance. A RBF neural network is used to adaptively learn such unknown upper bound, thereby effectively eliminating the chattering phenomenon. A key property of this scheme is that the prior knowledge of the upper bound of the system uncertainties is not required but estimated using a RBF neural estimator.
The control scheme integrates the sliding mode control and the nonlinear mapping of neural network. The adaptive neural network control with gradient method is proposed to adjust the sliding gain to attenuate the chattering. The sliding mode technique has been combined with adaptive control algorithm and neural network approximation method to achieve the desired attenuation of chattering and maintain good tracking in the presence of model uncertainties and external disturbances.
The paper is organized as follows. In Section 2, dynamics of triaxial MEMS gyroscope is introduced. In Section 3, a sliding mode control with a fixed sliding gain is proposed to guarantee the asymptotic stability of the closed loop system. In Section 4, a neural network sliding mode control is developed to adjust the sliding gain in a switching control law. Simulation results are presented in Section 5 to verify the effectiveness of the proposed control. Conclusions are provided in Section 6.
Dynamics of MEMS triaxial gyroscope
A MEMS vibratory gyroscope mainly contains three parts: one is the sensitive element of single mass suspended by spring beams, another is electrostatic actuations and sensing mechanisms for forcing an oscillatory motion and sensing the position and velocity of the sensitive element, the other is the rigid frame which is rotated along the rotation axis. A schematic diagram of a MEMS triaxial gyroscope in x-y plane is shown in Figure 1.

Schematic diagram of a MEMS triaxial gyroscope in x-y plane.
Dynamics of a MEMS gyroscope is derived from Newton’s law in the rotating frame.
As we know, Newton’s law in the rotating frame becomes

where
With the definition of

then

where
In a z-axis MEMS gyroscope, by supposing the stiffness of spring in z direction much larger than that in the x, y directions, the motion of the proof is constrained to only along the x-y plane. Referring to Park et al.,
3
assuming that the gyroscope is almost rotating at a constant angular velocity

where
Now we extends the discussion above from x-y plane to triaxial system. Assume that the gyroscope is moving with a constant linear speed; the gyroscope is rotating at a constant angular velocity; centrifugal forces are assumed negligible; the gyroscope undergoes rotations along

where
Because of the non-dimensional time

where
Define new parameters as:
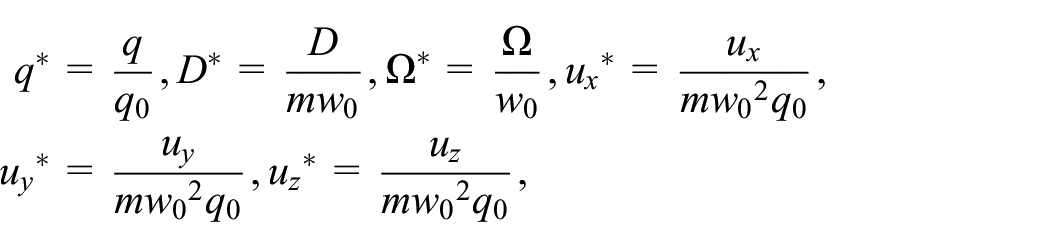

For the convenience of notation, ignoring the superscript, then the final form of the non-dimensional motion equation of gyroscope can be obtained

where
The control target for MEMS gyroscope is to find a control law so that the proof mass position can track the desired trajectory. In addition, in the presence of model uncertainties and external disturbance, a robust control design is required to improve the robustness and tracking resolution of the control system.
Design of sliding mode control
Sliding mode control has many attractive features such as robustness to parameter variations and insensitivity to disturbances. In this section, a sliding mode control with fixed sliding gain is proposed to guarantee the asymptotic stability of the closed loop system.
The control objective for MEMS gyroscope is to keep the proof mass oscillating in

where
Considering the parametric uncertainties and external disturbance, the dynamics of MEMS gyroscope (7) can be expressed as

where
Rewriting equation (9) as

Defining the right side of equation (10) as

Then equation (10) can be expressed as

Define

where
Assuming system satisfies
Defining tracking error


where
The derivative of sliding surface becomes

Setting

Based on (17), considering a robust compensator, then a comprehensive controller is designed as

where

where

Differentiating

From (17), the following can be obtained

Substituting (22) into (21) yields

Since

Design of neural network sliding mode control
Neural network has the capability of approximating any nonlinear continuous function over the compact input space. Therefore neural network’s learning ability to approximate arbitrary nonlinear continuous function makes it a useful tool for adaptive application. RBF NN has the universal approximation property which states that any sufficiently smooth function can be approximated by a suitable large network for all inputs in a compact set and the resulting function reconstruction error is bounded. RBF NN has a faster convergence property and a simpler architecture than BP (back propagation) NN. The RBF NN structure employed in our work is shown as Figure 2.
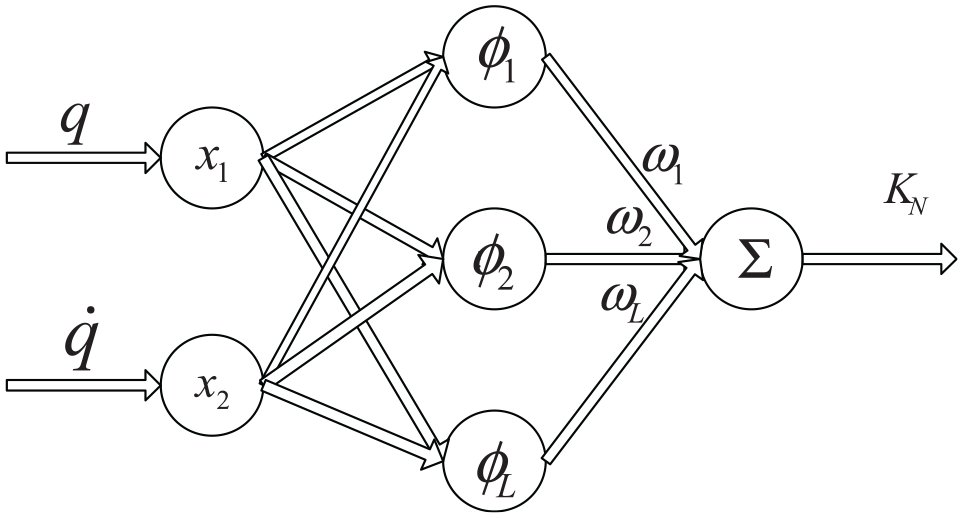
The structure of RBF network.
We will address the design of RBF network based sliding mode control problem. Because of the great advantages of neural networks in dealing with the nonlinear system, neural sliding mode controller is designed and analyzed in this section. Since sliding mode has some limitation such as chattering or high frequency oscillation in practical applications, neural network sliding mode control is adopted to facilitate adaptive gain adjustment and reduce the chattering. The block diagram of sliding mode control using RBF neural network is shown in Figure 3. Replacing

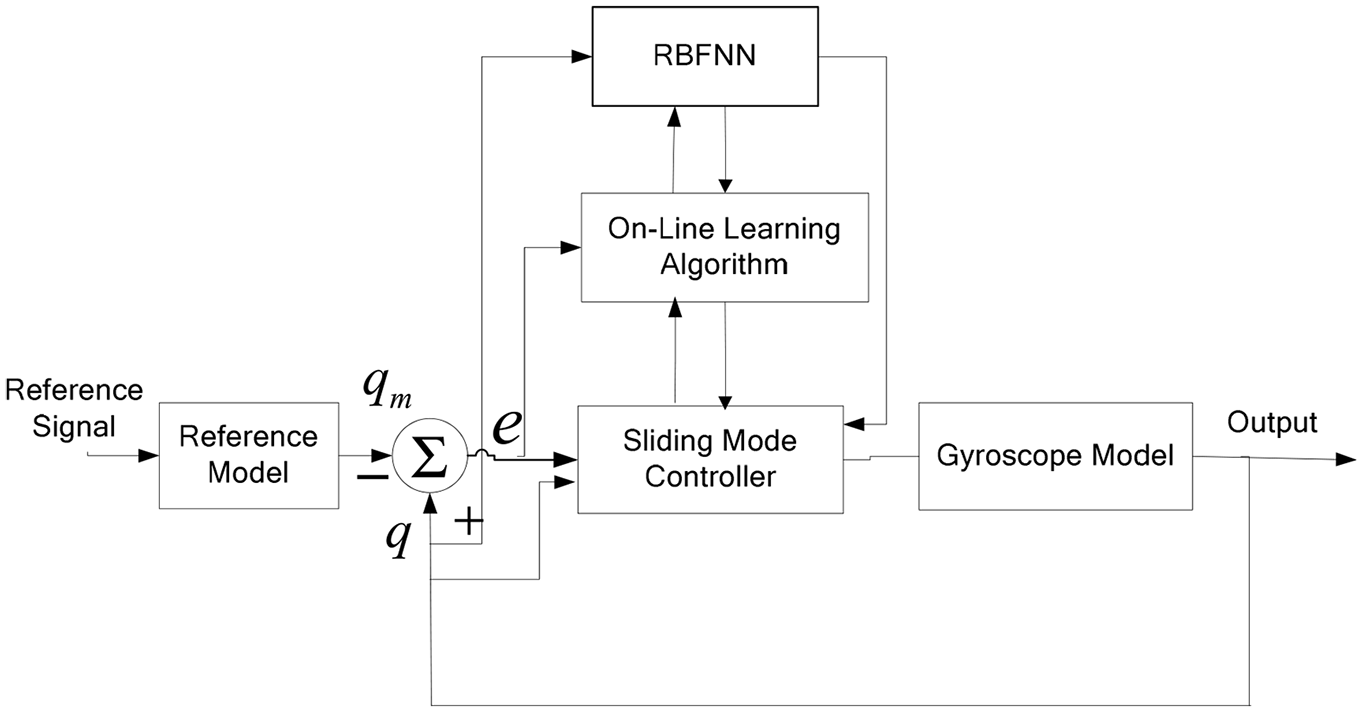
Block diagram of sliding mode control using RBF network.
If the upper bound value
The estimate of the upper bound

where

where
The key part of the learning algorithm is how to obtain a gradient vector using the chain rule. 10

where
The tracking error
The learning algorithm of network weight is derived as

Since the value of


Therefore the weight is updated by the amount

The weight learning algorithm is expressed as

where
The mean and standard deviation of the hidden layer are updated in the similar ways.
The learning law of ith center vector

where:

Then the updating algorithm of
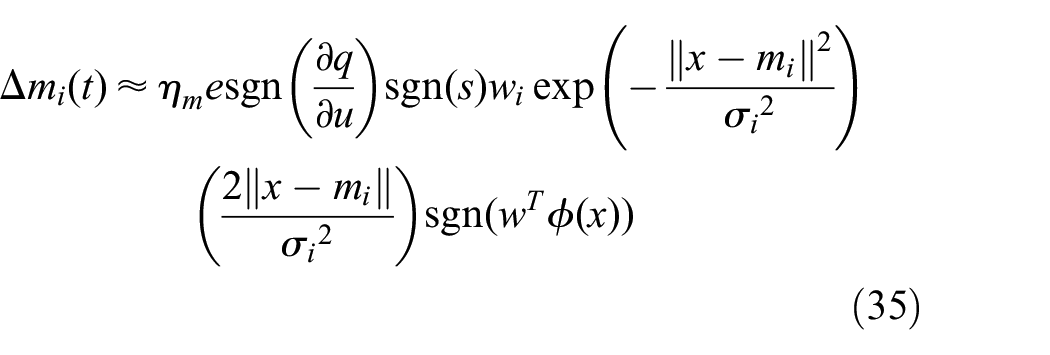
Therefore the learning algorithm of

The learning law of the ith standard deviation

where
Then its updating algorithm is derived as

The learning algorithm of

The effectiveness of the online training of neural network to adjust the control gain will be demonstrated by the following simulation results.
Simulation study
In this section, we will evaluate the proposed neural network sliding mode approach on the lumped MEMS gyroscope sensor model1,4,5 by using MATLAB/SIMULINK. Parameters of the MEMS gyroscope sensor are as follows:

In order to make the numerical simulation more easily realized and simplify the design of the controller, the dimensionless procedure for the micro gyroscope is implemented, Since the general displacement range of the micro gyroscope sensor in each axis is sub-micrometer level, it is reasonable to choose 1
Dimensionless parameters of micro gyroscope.

The unknown angular velocity is assumed
Initial value of
Figure 4 is the position tracking in the x, y, and z direction using the sliding mode control with fixed sliding gain. Figure 5 is the position tracking using the neural sliding mode control with RBF sliding gain adjustment. It can be observed from Figures 4 and 5 that the position trajectory can track that of reference model in very short time. Figures 6 and 7 depict the convergence of the tracking errors. It can be seen that tracking errors converge to zero asymptotically. The MEMS gyroscope can maintain the proof mass oscillating in the x, y, and z direction at given frequency and amplitude both with sliding mode control and with neural sliding mode control.
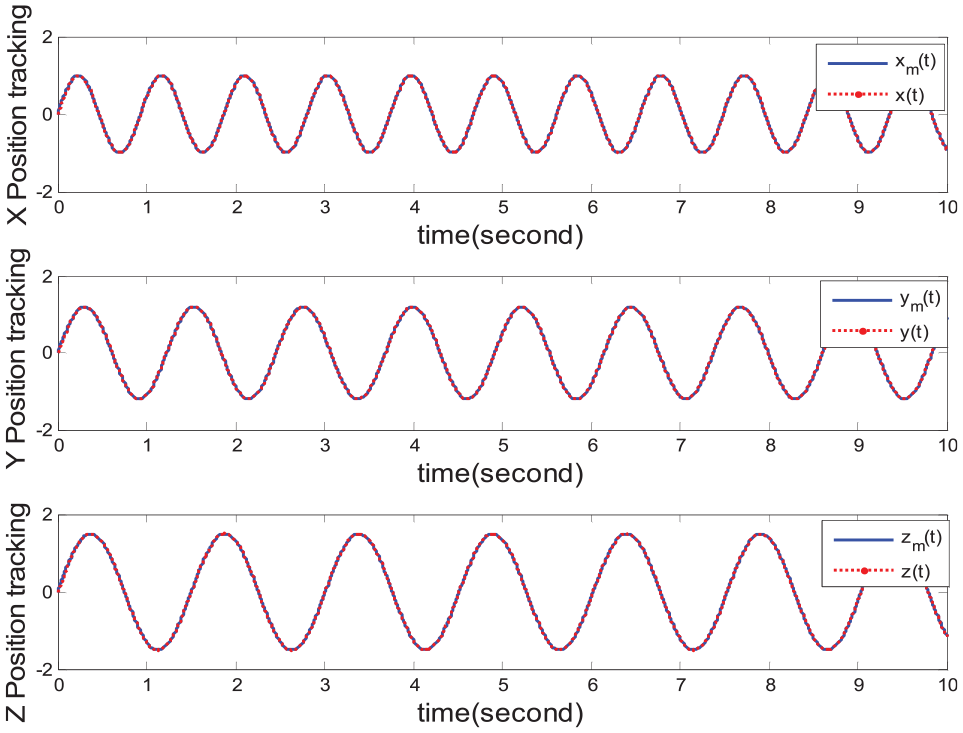
Position trajectory using sliding mode control with fixed sliding gain.

Position trajectory using neural network sliding mode control with RBF sliding gain adjustment.

Position tracking error using sliding mode control with fixed sliding gain.

Position trajectory using neural network sliding mode control with RBF sliding gain adjustment.
Figure 8 depicts the control inputs using the sliding mode control with fixed sliding gain, Figure 9 draws the control inputs using the neural sliding mode control with RBF sliding gain adjustment. The performance of neural sliding mode control is better than that of sliding mode control using fixed sliding gain because RBF neural network can adjust the sliding gain to eliminate the chattering phenomenon. Figure 10 shows the adaptation of the sliding gain adjustment using neural sliding mode control.

Control inputs using sliding mode control with fixed sliding gain.
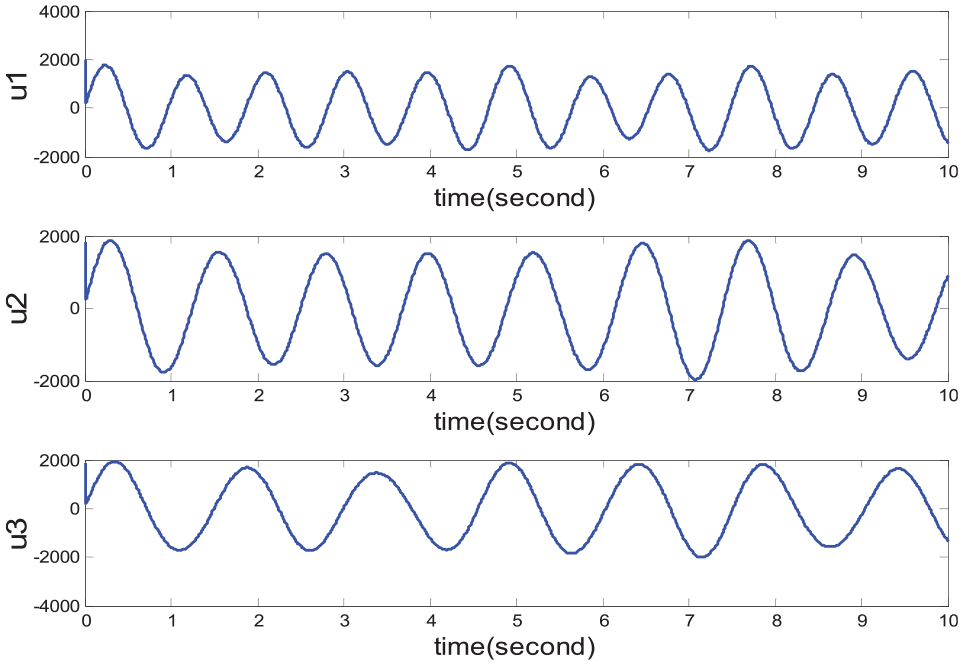
Control inputs using neural sliding mode control with RBF sliding gain adjustment.

RBF based sliding gain adjustment using neural network sliding mode control.
It it noted that the dimensionless procedure for the micro gyroscope system is carried out, there are no unit of magnitude from Figures 4 to 10.
It is concluded that the system response is as expected, and the simulation results demonstrated that both neural sliding mode control and sliding mode control have good tracking performance and tracking errors converge to zero asymptotically. Neural network-based adaptive sliding mode controller with adaptive sliding gain has better performance in eliminating the chattering than sliding mode control using fixed switching gain.
A universal standard is adopted to quantify tracking error by calculating root mean square error (RMSE) to observe the tracking performance under different controller. The RMSE reflects how much the measured value deviates from its true value and the smaller the RMSE is, the higher the measurement accuracy is. Meanwhile, based on the statistics of RMSE, we carry out quantitative comparison between the SMC with fixed sliding gain and SMC with NN sliding gain under the same reference signal excitation.
It is evident from the Table 2 that the performance of the proposed control scheme is remarkably superior to that of the standard SMC in tracking accuracy since the corresponding steady-state errors of the proposed method are significantly smaller than those of the standard SMC.
Comparison of RMSE between the two methods.

Conclusion
A neural network based sliding mode control is proposed for a triaxial angular velocity sensor. Neural network compensator is used to approximate the upper bound of model uncertainties and external disturbances and adjust the sliding gain, making the system react to the changes of the model uncertainties and external disturbances with better adaptability. Simulation results show that neural network-based adaptive sliding mode controller has satisfactory performance in reducing the chattering.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is partially supported by National Science Foundation of China under Grant No. 61873085.