
Abstract
This article presents a novel nonlinear robust wheel slip rate tracking control strategy for autonomous vehicle with actuator dynamics. First, a simple yet effective wheel slip rate dynamic model with the lumped uncertainty is established as the basis of the nonlinear robust wheel slip rate tracking control strategy design. Second, a nonlinear robust wheel slip rate tracking control law with lumped uncertainty observer is derived via the Lyapunov-based method. The lumped uncertainty observer is used to estimate and compensate the lumped uncertainty of the system by combining the radial basis function neural network with the adaptive laws for the unknown optimal weight vector of the radial basis function neural network. Then, a novel tracking differentiator is designed to calculate the derivative of the desired wheel slip rate, which is an essential aspect of the proposed nonlinear robust wheel slip rate tracking control law. Finally, the performance of the proposed control strategy is verified based on straight line braking maneuvers with three typical signals.
Keywords
Introduction
Nowadays, autonomous vehicle has become one of the most popular emerging areas, and it will have a far-reaching impact on human society. 1 However, fast and stable wheel slip rate tracking control is the important basis for autonomous vehicle to realize the advanced self-driving functions of fully automatic parking control, 2 adaptive cruise control, 3 and autonomous emergency braking control. 4 Therefore, fast and stable wheel slip rate tracking control has been attracted widespread attention by many scholars and automobile manufacturers.
In the early days, the main objective of the wheel slip rate tracking control is to improve the braking stability and minimize the braking distance of the vehicle, and research results adopt mostly logic switching rule to make the wheel slip rate steady in the near desired value corresponding to the maximum value of the friction coefficient between tire and the road surface. Kuo and Yeh 5 presented a four-phase anti-lock brake algorithm to accommodate all road conditions, and the proposed algorithm adopted the elapsed time interval and the angular acceleration of the wheel to control the switching of the four modes of the brake actuator, which consisted of the pressure increasing mode, the high-pressure holding mode, the pressure decreasing mode, and the low-pressure holding mode. Fu et al. 6 adopted semi-analytical and semi-numerical methods to establish a set of switching rules to make the wheel slip rate steady in the near desired value corresponding to the maximum value of the friction coefficient between tire and the road surface. Kiencke and Nielsen 7 designed the logic switching rules based on wheel deceleration thresholds to keep the wheel slip rate in the neighborhood of the optimal point. Ait-Hammouda and Pasillas-Lepine 8 presented an 11-phase anti-lock brake strategy based on wheel deceleration thresholds, and the proposed strategy could accommodate discontinuous road transitions. Pasillas-Lépine 9 presented a class of five-phase anti-lock brake algorithms based on wheel deceleration logic-based switching and gave the existence and stability conditions of the most efficient limit cycle based on Poincaré maps. Tanelli et al. 10 proposed a hybrid anti-lock braking system (ABS) control approach to establish a limit cycle around the wheel slip rate corresponding to the maximum value of the friction coefficient between tire and the road surface and proved that the limit cycle had asymptotic stability and structural stability with respect to different road conditions and the actuator rate limit based on Poincaré map. Jing et al. 11 proposed a switched control approach for ABS based on the Filippov framework. First, the control actions of the brake actuator with on/off valves were divided into increase action, hold action, and decrease action. Then, the switching surfaces were designed to switch the three control actions of the brake actuator with on/off valves to make the wheel slip rate converge to the desired equilibrium set. The above logic switching rule–based wheel slip rate tracking control methods are difficult to achieve high-precision tracking control of any desired wheel slip rate and could not satisfy the requirements of autonomous vehicle for wheel slip rate tracking control.
Compared with the logic switching rule–based wheel slip rate tracking control methods, the dynamic model–based wheel slip rate tracking control methods are easier to achieve high-precision tracking control of any desired wheel slip rate. 12 Buckholtz 13 proposed a sliding mode controller with continuous saturation function for wheel slip tracking, and the continuous saturation function was used to reduce the chattering phenomenon of the conventional sliding mode control method at the expense of the robustness and tracking accuracy of the conventional sliding mode control method. Johansen et al. 14 developed a wheel slip rate tracking control method for the vehicle equipped with electromechanical brake actuator and a brake-by-wire system. First, a family of linearization models was derived from the quarter-vehicle model to use as the nominal model. Then, the gain-scheduled linear quadratic regulator (LQR) approach was adopted to design the wheel slip rate tracking controller based on the nominal model. Park and Lim 15 proposed an adaptive full state feedback wheel slip rate tracking control method based on the quarter-vehicle model with time delay input, and the unmeasurable vehicle speed is estimated by the nonlinear sliding observer. Harifi et al. 16 designed a sliding mode controller with integral switching surface for wheel slip rate control based on a two-axle vehicle model, and the integral switching surface could effectively reduce chattering phenomenon in sliding mode control. Corno et al. 17 established a family of linear models as nominal model by linearizing the wheel slip dynamic model at different vehicle velocities and wheel slip rates and adopted the linear parameter-varying control design technique to develop a fully scheduled wheel slip rate tracking controller scheduled on the vehicle velocity. Amodeo et al. 18 proposed a nonlinear robust wheel slip rate tracking controller based on the second-order sliding mode control method, which could eliminate the chattering phenomenon of the conventional sliding mode control method. Meanwhile, the sliding mode observer was designed to estimate the tire–road friction coefficient to make the proposed controller accommodate all road conditions. Pasillas-Lépine et al. 19 presented a continuous wheel slip control approach based on wheel slip rate and wheel acceleration measurements and adopted the Lyapunov stability theory to prove that the state trajectory of the closed-loop system could asymptotically converge to the wheel slip rate around any prescribed setpoint, both in the stable and unstable regions of the tire. Mirzaei and Mirzaeinejad 20 presented a nonlinear robust wheel slip rate optimal predictive tracking control approach based on the quarter-vehicle model with the Dugoff’s tire model and adopted the Lyapunov stability theory to prove that the proposed approach had strong robustness against modeling uncertainties. Hsu and Kuo 21 proposed an adaptive exponential-reaching sliding mode wheel slip rate tracking control system by combining an equivalent controller with an exponential compensator. The functional-linked wavelet neural network was used as the equivalent controller to online approximate the system uncertainties and the exponential-reaching sliding mode control method was to design the exponential compensator, which could eliminate the effect of the approximation error caused by the equivalent controller. Mirzaeinejad 22 presented a robust prediction–based wheel slip rate tracking controller based on nonlinear predictive method and radial basis function neural network (RBFNN). The nonlinear predictive method was used to design an optimal control law, and the RBFNN was used to improve the robustness of the system by estimating the unknown uncertainties of the system. Zhang and Li 23 proposed an adaptive backstepping sliding mode control approach with RBFNN to design the wheel slip rate tracking controller, and the RBFNN was used as the uncertainty observer to estimate and compensate the lumped uncertainty of the system. He et al. 24 presented a robust adaptive wheel slip rate tracking controller based on a quarter-vehicle model and barrier Lyapunov function. Mirzaeinejad 22 proposed a novel nonlinear robust wheel slip rate tracking controller with RBFNN-based observer, which was used to online estimate and compensate the system uncertainty. Zhang and Li 25 proposed a new robust backstepping sliding mode wheel slip rate tracking controller based on the L2-gain stability theory, and the simulation results showed that the proposed controller had strong robustness against the system uncertainty and external disturbance. The above dynamic model–based wheel slip rate tracking control methods usually depend on simplified dynamic models to design the controllers, and overly complicated dynamic models will result in the designed controllers with high computational complexity. However, the simplified dynamic models cannot accurately characterize the complex nonlinearity and uncertainty of wheel dynamics. Therefore, the research on nonlinear robust tracking control method for any desired wheel slip rate has profound theoretical and practical value.
In this article, a novel nonlinear robust wheel slip rate tracking control strategy for autonomous vehicle with actuator dynamics is proposed. First, a simple yet effective wheel slip rate dynamic model with the lumped uncertainty is deduced from the quarter-vehicle model with actuator dynamics to use as the basis of the nonlinear robust wheel slip rate tracking control strategy design. Second, a nonlinear robust wheel slip rate tracking control law with lumped uncertainty observer is derived via the Lyapunov-based method. The lumped uncertainty observer is designed to suppress the effect of the lumped uncertainty on the system performance by adopting the RBFNN with the unknown optimal weight vector adaptive adjust to approximate and compensate the lumped uncertainty. Then, a novel tracking differentiator is designed to calculate the derivative of the desired wheel slip rate, which is an essential aspect of the proposed nonlinear robust wheel slip rate tracking control law. Finally, the performance of the proposed control strategy is verified based on the straight line braking maneuvers on a flat road with desired step signal, desired sinusoidal signal, and desired ramp signal.
This article is organized as follows: section “The dynamic model” establishes the simple yet effective wheel slip rate dynamic model with the lumped uncertainty; section “The proposed control strategy” develops and analyzes the nonlinear robust wheel slip rate tracking control law with lumped uncertainty observer and the tracking differentiator via the Lyapunov-based method; section “Simulation results” validates the performance of the proposed control strategy via the straight line braking maneuvers; and finally, section “Conclusion” gives the main conclusion of our work.
The dynamic model
In this section, the quarter-vehicle model with the Burckhardt tire model is established to describe the braking dynamics by ignoring the suspension dynamics, the tire relaxation dynamics, the tire cornering, and camber characteristics. As shown in Figure 1, we choosing the wheel angular speed ω and the vehicle speed v as the system state variables, the dynamic equations of the quarter-vehicle model are given by26,27





The quarter-vehicle model.
The first derivative of equation (4) with respect to time is given by

Substituting equation (5) into equation (1), the state variable

Since the vehicle inertia is far larger than the wheel inertia, the vehicle speed can be regarded as a slowly varying parameter relative to the wheel slip rate. Therefore, the dynamic equations of the quarter-vehicle model described by equation (6) can be simplified as

Aiming at electromechanical brake actuator for autonomous vehicle, the brake actuator dynamics can be described as a first-order inertial link29

According to the Laplace inverse transform, equation (8) can be transformed to the following form

Let


The proposed control strategy
Control law design
In this section, the RBFNN is used as the lumped uncertainty observer to suppress the effect of the lumped uncertainty described by equation (10) on system performance since it can approximate and compensate any nonlinear function with arbitrary accuracy.
30
Let

According to the basis function vector of RBFNN, the lumped uncertainty of the system is given by


Supposing that

Consider the system with actuator dynamics described by equation (10), the following nonlinear robust wheel slip rate tracking control law is designed to construct the closed-loop system

where



Defining the Lyapunov function as

where
The first derivative of the Lyapunov function along the trajectory of the system is given by

Substituting equation (10) into equation (20) yields


Substituting equation (12) into equation (21) yields

Substituting the nonlinear robust wheel slip rate tracking control law described by equation (15) into equation (22) yields

Substituting the modified adaptive laws for the unknown optimal weight vectors into equation (23) yields

Substituting the constraint of the approximation error that

According to Young’s inequality,
31
we can get



Substituting inequalities (26)–(28) into inequality (25) yields

According to the constraints that

Substituting the positive constant defined by equation (30) into inequality (29) yields

According to comparison principle,
32
we can get based on inequality (31)

Therefore, all signals of the closed-loop system are uniformly ultimately bounded. Moreover, according to the definition of the Lyapunov function, the wheel slip rate tracking error satisfies

According to inequality (33), reducing the initial estimation errors of the optimal weight vectors can reduce the upper bound of the wheel slip rate tracking error.
Tracking differentiator design
In the process of the above nonlinear robust wheel slip rate tracking control law design described by Theorem 1, the first derivative of the desired wheel slip rate is an essential aspect of the nonlinear robust wheel slip rate tracking control law. Usually, the first-order inertial link with small time constant is used to calculate the first derivative of the input signal, but it will lead to excessive noise in the first derivative of the input signal because of its inherent noise amplification effect. In order to avoid the excessive noise caused by the first-order inertial link with small time constant, a novel tracking differentiator described by Theorem 2 is designed in this section to calculate the first derivative of the desired wheel slip rate.
Supposing that the second derivative of the desired wheel slip rate satisfies

where
Shifting the equilibrium point of the system to the origin based on the following change of the system states

According to equation (35), the system described by equation (34) is transformed into the following form

Defining the Lyapunov function as

The first derivative of the Lyapunov function along the trajectory of the system is given by

Substituting equation (36) into equation (38), we can obtain

According to Young’s inequality,
25
we can get

Substituting inequality (40) into equation (39) yields

Defining the positive constant as

Substituting the positive constant defined by equation (42) into inequality (41) yields

According to comparison principle,
29
we can get based on inequality (43)

Substituting assumption that

According to inequality (45), we can get


Therefore, when
According to Theorem 2, the nonlinear robust wheel slip rate tracking control law described by equation (15) can be rewritten as

Simulation results
In this section, the straight line braking maneuvers on a flat road with desired step signal, desired sinusoidal signal, and desired ramp signal are carried out based on vehicle dynamics simulation software (MSC CarSim®) to validate the performance of the proposed control strategy. In order to investigate the effect of load transfer during braking on the performance of the proposed control strategy, we show the simulation results of front left wheel and rear right wheel. Let
The parameters of the vehicle and the proposed control strategy.

Straight line braking maneuver with desired step signal
The straight line braking maneuver with desired step signal is carried out on a flat ice-snow road to test the steady and dynamic characteristics of the wheel slip rate tracking closed-loop system. In the straight line braking maneuver with desired step signal, the initial vehicle speed and the gear position of the transmission are set to 33.33 m/s and neutral. Meanwhile, the final value of the desired step signal is set to 0.09. Figure 2(a)–(k) shows the desired wheel slip rate and its estimated value, the derivative of the desired wheel slip rate, the vehicle and wheel speeds, the desired wheel slip rate and its actual value, the wheel slip rate tracking error, the brake torque, the relationship between wheel slip rate and longitudinal friction coefficient, and the uncertainties of front left wheel and rear right wheel, respectively. As shown in Figure 2(a)–(b), the proposed tracking differentiator can effectively smooth the desired wheel slip rate and calculate the first derivative of the desired wheel slip rate without excessive noise. As shown in Figure 2(c)–(f), both the front left and rear right wheel slip rates can quickly and accurately track the desired value under the condition that the rear wheel vertical load is transferred to front wheel. Therefore, the proposed control strategy has strong robustness against the suspension dynamics and the tire relaxation dynamics. As shown in Figure 2(h)–(k), the lumped uncertainty observer can accurately estimate the lumped uncertainty of the system. As shown in Figure 2(g), the longitudinal friction coefficients of front left wheel and rear right wheel can change with their wheel slip rates, and finally stabilize in the near desired value corresponding to the final value of the desired step signal. Therefore, the proposed control strategy can effectively improve the braking smoothness.
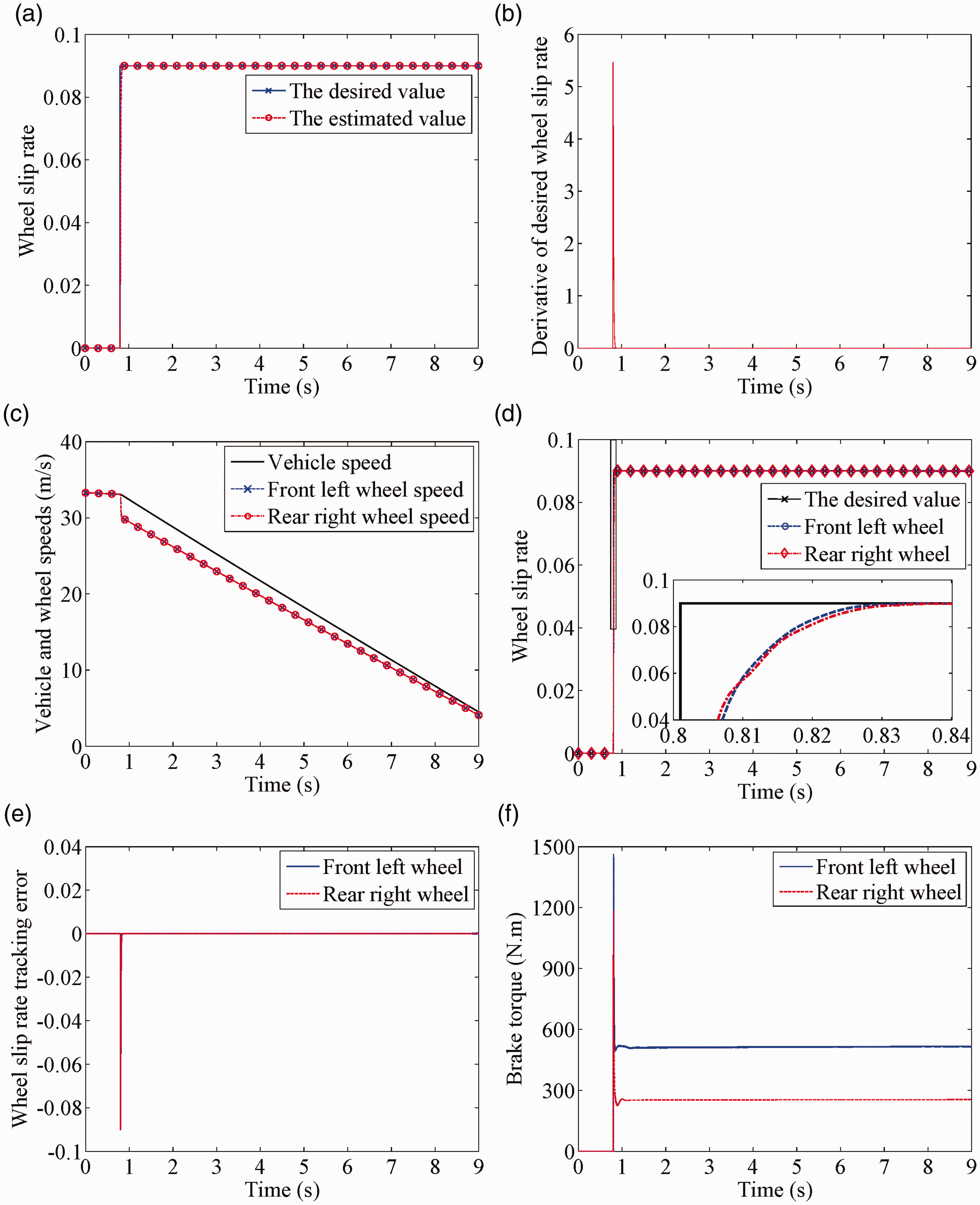
The simulation results of straight line braking maneuver with desired step signal: (a) the desired wheel slip rate and its estimated value, (b) the derivative of the desired wheel slip rate, (c) the vehicle and wheel speeds, (d) the desired wheel slip rate and its actual value, (e) the wheel slip rate tracking error, (f) the brake torque, (g) the relationship between wheel slip rate and longitudinal friction coefficient, (h) the uncertainty d1 of front left wheel, (i) the uncertainty d2 of front left wheel, (j) the uncertainty d1 of rear right wheel, and (k) the uncertainty d2 of rear right wheel.
Straight line braking maneuver with desired sinusoidal signal
The straight line braking maneuver with desired sinusoidal signal is carried out on a flat wet asphalt road to test the delay characteristic of the wheel slip rate tracking closed-loop system. In the straight line braking maneuver with desired sinusoidal signal, the initial vehicle speed and the gear position of the transmission are set to 33.33 m/s and neutral. Meanwhile, the amplitude, bias, and frequency of the desired sinusoidal signal are set to 0.04, 0.05, and 9.42 rad/s, respectively. Figure 3(a)–(k) shows the desired wheel slip rate and its estimated value, the derivative of the desired wheel slip rate, the vehicle and wheel speeds, the desired wheel slip rate and its actual value, the wheel slip rate tracking error, the brake torque, the relationship between wheel slip rate and longitudinal friction coefficient, and the uncertainties of front left wheel and rear right wheel, respectively. As shown in Figure 3(a)–(b), the proposed tracking differentiator can effectively smooth the desired wheel slip rate and calculate the first derivative of the desired wheel slip rate without excessive noise. As shown in Figure 3(c)–(e), both the front left and rear right wheel slip rates can quickly and accurately track the desired value, and the front left wheel slip rate has higher tracking accuracy than the rear right wheel slip rate. As shown in Figure 3(h)–(k), the lumped uncertainty observer can accurately estimate the lumped uncertainty of the system. As shown in Figure 3(f)–(g), the brake torques and the longitudinal friction coefficients of front left wheel and rear right wheel can change periodically with their wheel slip rates, and the brake torque of front left wheel is much more larger than that of rear right wheel because of the effect of load transfer. Therefore, the proposed control strategy has strong robustness against the uncertainty caused by the periodic fluctuation of the wheel slip rate.

The simulation results of straight line braking maneuver with desired sinusoidal signal: (a) the desired wheel slip rate and its estimated value, (b) the derivative of the desired wheel slip rate, (c) the vehicle and wheel speeds, (d) the desired wheel slip rate and its actual value, (e) the wheel slip rate tracking error, (f) the brake torque, (g) the relationship between wheel slip rate and longitudinal friction coefficient, (h) the uncertainty d1 of front left wheel, (i) the uncertainty d2 of front left wheel, (j) the uncertainty d1 of rear right wheel, and (k) the uncertainty d2 of rear right wheel.
Straight line braking maneuver with desired ramp signal
The straight line braking maneuver with desired ramp signal is carried out on a flat dry asphalt road to test the tracking characteristic of the wheel slip rate tracking closed-loop system. In the straight line braking maneuver with desired ramp signal, the initial vehicle speed and the gear position of the transmission are set to 33.33 m/s and neutral, respectively. Meanwhile, the slopes and final values of the four desired ramp signals are set to [0.05, 0.03], [0.1, 0.06], [−0.1, 0.03], and [−0.05, 0], respectively. Figure 4(a)–(k) shows the desired wheel slip rate and its estimated value, the derivative of the desired wheel slip rate, the vehicle and wheel speeds, the desired wheel slip rate and its actual value, the wheel slip rate tracking error, the brake torque, the relationship between wheel slip rate and longitudinal friction coefficient, and the uncertainties of front left wheel and rear right wheel, respectively. As shown in Figure 4(a)–(b), the proposed tracking differentiator can effectively smooth the desired wheel slip rate and calculate the first derivative of the desired wheel slip rate without excessive noise. As shown in Figure 4(c)–(f), both the front left and rear right wheel slip rates can quickly and accurately track the desired value, and the brake torques of front left wheel and rear right wheel generate minor fluctuations at time 1.8–2.2 s to reduce the steady-state tracking error of the wheel slip rate. Therefore, the proposed control strategy has higher tracking accuracy for both fast and slow changing signals. As shown in Figure 4(h)–(k), the lumped uncertainty observer can accurately estimate the lumped uncertainty of the system. As shown in Figure 4(g), the longitudinal friction coefficients of front left wheel and rear right wheel can smoothly change with their wheel slip rates. Therefore, the proposed control strategy can effectively improve the braking smoothness.

The simulation results of straight line braking maneuver with desired ramp signal: (a) the desired wheel slip rate and its estimated value, (b) the derivative of the desired wheel slip rate, (c) the vehicle and wheel speeds, (d) the desired wheel slip rate and its actual value, (e) the wheel slip rate tracking error, (f) the brake torque, (g) the relationship between wheel slip rate and longitudinal friction coefficient, (h) the uncertainty d1 of front left wheel, (i) the uncertainty d2 of front left wheel, (j) the uncertainty d1 of rear right wheel, and (k) the uncertainty d2 of rear right wheel.
Conclusion
This article has proposed a novel nonlinear robust wheel slip rate tracking control strategy for autonomous vehicle with actuator dynamics. First, a simple yet effective wheel slip rate dynamic model is deduced from the quarter-vehicle model with actuator dynamics by regarding the suspension dynamics, the tire relaxation dynamics, the tire cornering, and camber characteristics as the lumped uncertainty of the system, and the wheel slip rate dynamic model is used as the basis of the nonlinear robust wheel slip rate tracking control strategy design. Second, a nonlinear robust wheel slip rate tracking control law with lumped uncertainty observer is derived via the Lyapunov-based method. The lumped uncertainty observer is designed to suppress the effect of the lumped uncertainty on the system performance by adopting the RBFNN with the unknown optimal weight vector adaptive adjust to approximate and compensate the lumped uncertainty. Then, a novel tracking differentiator is designed to calculate the derivative of the desired wheel slip rate, which is an essential aspect of the proposed nonlinear robust wheel slip rate tracking control law. Finally, the performance of the proposed control strategy is verified through simulations of the straight line braking maneuvers on a flat road with desired step signal, desired sinusoidal signal, and desired ramp signal on vehicle dynamics simulation software, and the simulation results show that the proposed control strategy can quickly and accurately track the desired wheel slip rate, and satisfy the requirements of autonomous vehicle for wheel slip rate tracking control.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Jilin Province Science and Technology Development Plan Projects (20180201056GX) and the Jilin Provincial Development and Reform Commission Science and Technology Projects (2019C036-6).