
Abstract
This article proposes a novel robust adaptive wheel slip rate tracking control method with state observer. First, a modified tracking differentiator is proposed based on a combination of tangent sigmoid function with terminal attraction factor and linear function to improve convergence speed and avoid chattering phenomenon, and then, the modified tracking differentiator is used as state observer to smooth and estimate the states of the system. Second, a robust adaptive wheel slip rate tracking control law with fuzzy uncertainty observer and modified adaptive laws is derived based on Lyapunov-based method. The fuzzy uncertainty observer is used for estimating and compensating the additive uncertainty, and the modified adaptive laws are used for estimating the unknown optimal weight vector of the fuzzy uncertainty observer and the multiplicative uncertainty. Finally, the performance of the robust adaptive wheel slip rate tracking control method is verified based on the model-in-the-loop simulation system.
Keywords
Introduction
Nowadays, self-driving electric vehicle has become one of the main goals of automobile industry among China, Europe, the United States, and Japan. However, continuous, fast, and stable wheel slip rate tracking control is an extremely important foundation of achieving braking energy regeneration, 1 fully automatic parking control, 2 adaptive cruise control, 3 and autonomous emergency braking control 4 for self-driving electric vehicle. Therefore, continuous, fast, and stable wheel slip rate tracking control has been widely concerned by many scholars and automobile manufacturers.
In the early days, the wheel slip rate tracking control is mostly used in the antilock braking system (ABS), which can effectively both improve the braking stability and minimize the braking distance by making the wheel slip rate converge to the desired value that corresponds to the maximum value of tire–road friction coefficient. Since the vehicle exhibits the characteristics of complex nonlinearity, time variation, strong coupling, and uncertainty under braking condition, early research results adopt mostly logic switching rule to make the wheel slip rate tracking control system have strong robustness against lumped uncertainty. Fu et al. 5 gave the periodic solution of the single-wheel antilock braking system and adopted Poincare map to analyze the stability of the periodic solution. Jing et al. 6 proposed a switched wheel slip rate tracking control strategy with few tuning parameters for antilock braking system, and the constraints of the tuning parameters were given by Filippov-based stable theory framework to make the wheel slip rate converge to the desired value that corresponded to the peak point of tire–road friction coefficient. Kiencke and Nielsen 7 utilized wheel deceleration information to design logic switching rule to keep the wheel slip rate in the neighborhood of the optimal value. Kuo and Yeh 8 presented a four-state control strategy for antilock braking system based on piecewise linear tire model, and the proposed scheme was proved to accommodate all road conditions via Poincare maps. Pasillas-Lepine 9 adopted wheel deceleration logic-based switching to design five-phase antilock brake algorithm, and the robustness of the designed algorithm with respect to friction coefficient changes was proved based on Poincare map. Tanelli et al. 10 gave the existing conditions of the limit cycles around the desired wheel slip rate for the brake actuators with on/off dynamics and proved that the limit cycles were stable via Poincare maps. Yeh and Day 11 investigated the effects of various logic switching rules on the limit cycle based on Poincare map. The above wheel slip rate tracking control methods based on logic switching rule are difficult to achieve high-precision tracking control of any desired wheel slip rate, and there is a lack of theoretical support for the stability.
Compared with wheel slip rate tracking control methods based on logic switching rule, wheel slip rate tracking control methods based on dynamic model are easier to achieve high-precision tracking control of continuous desired wheel slip rate and have a clear theory about the stability of the system. Amodeo et al. 12 proposed a second-order sliding mode wheel slip rate tracking controller with a sliding mode observer, which was used for estimating the tire–road friction coefficient. The proposed controller generated continuous control actions to eliminate the chattering phenomenon of conventional sliding mode controller. Harifi et al. 13 designed a novel sliding mode controller with integral switching surface for wheel slip rate tracking control based on two-axle vehicle dynamic model, and the integral switching surface can effectively reduce the chattering caused by the discontinuous term of the sliding mode controller. Johansen et al. 14 established a family of nominal models to describe the wheel slip rate dynamics via linearizing locally the wheel slip rate dynamic model and adopted linear quadratic regulator (LQR) approach to design a gain-scheduled wheel slip rate tracking controller. Lin and Hsu 15 proposed a hybrid wheel slip rate tracking control system with a system uncertainty observer by combining a nominal controller with a compensation controller. The nominal controller was used for making the wheel slip rate track the desired value in the presence of the system uncertainty, and the compensation controller was used for improving the wheel slip rate tracking precision by compensating the estimation error of the system uncertainty observer. He et al. 16 presented a novel wheel slip rate output feedback tracking controller by the time-varying asymmetric barrier Lyapunov function–based control method, and then, the proposed controller was proved to have strong robustness against external disturbance and parameter deviation. Mirzaei et al. 17 presented an optimized fuzzy wheel slip rate tracking controller, and all the components of the fuzzy system were estimated based on hybrid optimization algorithm composing of genetic algorithm and error-based global optimization approach. Mirzaei and Mirzaeinejad 18 presented a nonlinear optimal wheel slip rate tracking controller with a free weight ratio based on wheel dynamic model, and the free weight ratio was used to compromise control accuracy and control energy. Mirzaeinejad 19 presented a nonlinear robust control law with radial basis function (RBF) neural network–based observer for wheel slip rate tracking control, and the RBF neural network–based observer was used for estimating and compensating the unknown uncertainty caused by changing vehicle parameters and unmodel dynamics. Pasillas-Lepine et al. 20 proposed a nonlinear wheel slip rate tracking controller with the wheel slip rate and the difference between the wheel and vehicle accelerations for the feedback variables, and the robustness of the proposed wheel slip rate tracking control algorithm with respect to vertical load variations and uncertainties in tire–road friction was proved via Lyapunov-based method. Qiu et al. 21 proposed a nonlinear backstepping control law to track the desire wheel slip rate and avoid the wheel slip rate in the unstable region via asymmetric barrier Lyapunov function–based dynamic surface control approach, which can both relax the required initial conditions of the closed-loop system and eliminate repeated differentiation. Tanelli et al. 22 presented a nonlinear output feedback wheel slip rate tracking controller based on wheel dynamic model with input constraints, and the proposed controller could make a distinction between the unstable region and the stable region of the friction curve by Poincare–Bendixson theorem. Yu et al. 23 established four nominal models corresponding to different tire–road friction conditions based on quarter-vehicle model with LuGre tire model and designed four wheel slip rate tracking controllers for the four nominal models. Moreover, the index function was used for achieving the smooth transformation of the four wheel slip rate tracking controllers. He et al. 24 established a quarter-vehicle model with Burckhardt tire model as control model and then proposed a novel nonlinear robust wheel slip rate tracking controller based on barrier Lyapunov function. Zhang and Li 25 presented an adaptive sliding mode wheel slip rate tracking controller with uncertainty observer based on backstepping design framework and adopted Lyapunov-based method to prove that the wheel slip rate tracking error was uniformly ultimately bounded in the presence of uncertainty. The above wheel slip rate tracking control methods based on dynamic model usually depend on simplified dynamic models to design simple and effective controllers. However, the simplified dynamic models cannot accurately characterize complex nonlinearity, time variation, strong coupling, and uncertainty under braking condition. Therefore, the research on wheel slip rate tracking control method with strong robustness and high precision has profound theoretical and practical value.
In this article, we propose a novel robust adaptive wheel slip rate tracking control method with state observer based on wheel slip rate dynamic model with additive and multiplicative uncertainties. First, a modified tracking differentiator is proposed based on a combination of tangent sigmoid function with terminal attraction factor and linear function. The tangent sigmoid function with terminal attraction factor can effectively cut short the convergence time if the state trajectory of the system is away from the equilibrium point, and the linear function can avoid chattering phenomenon if the state trajectory of the system approaches the equilibrium point. Then, the modified tracking differentiator is used as state observer to smooth and estimate the states of the system to solve the excessive noise problem caused by the noise amplification effect of the traditional first-order inertial link with small inertia time constant when being used for calculating the first-order derivative of the signal. Second, a simplified wheel slip rate dynamic model with additive and multiplicative uncertainties caused by the neglection of suspension dynamics, tire rolling resistance, and tire sideslip characteristics and the estimation error of the state observer is derived for control strategy design, and a robust adaptive wheel slip rate tracking control law with fuzzy uncertainty observer is derived based on the simplified wheel slip rate dynamic model with additive and multiplicative uncertainties and Lyapunov-based method. The fuzzy uncertainty observer is used for estimating and compensating the additive uncertainty of the system, and the unknown weight vector of the fuzzy uncertainty observer and the multiplicative uncertainty of the system are estimated by modified adaptive laws. Therefore, the fuzzy uncertainty observer with the modified adaptive laws not only improves the robust and adaptive ability of the system but also solves the problem of high computational complexity and unreasonable sensitivity to system uncertainties resulting from overly complicated model-based control strategy. Finally, the effectiveness and feasibility of the robust adaptive wheel slip rate tracking control method are verified based on the model-in-the-loop simulation system.
This article is organized as follows: in section “The dynamic model,” the wheel slip rate dynamic model with the uncertainties is derived; in section “The proposed method,” the robust adaptive wheel slip rate tracking control method with state observer is developed and analyzed based on Lyapunov-based method; in section “Simulation results,” various maneuvers are carried out to compare the proposed robust adaptive wheel slip rate tracking control method with the wheel slip rate sliding mode tracking control method; section “Conclusion” gives the conclusion of our work.
The dynamic model
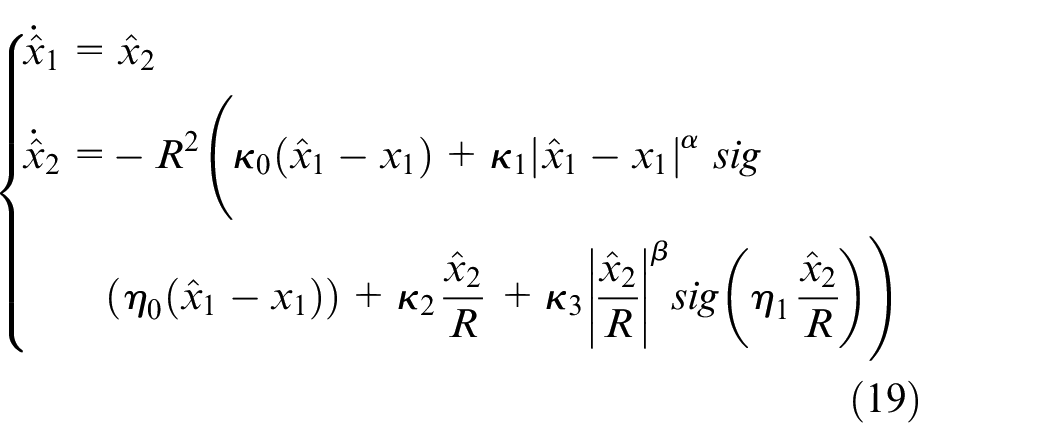
Basically, the wheel slip rate dynamic model is the basis of control strategy design, but overly complicated model will easily lead to control strategy with high computational complexity and unreasonable sensitivity to system uncertainties, and the simplified model cannot accurately characterize complex nonlinearity, time variation, strong coupling, and uncertainty under braking condition. Hence, the wheel slip rate dynamic model with the additive uncertainty caused by ignoring suspension dynamics, tire rolling resistance, and tire sideslip characteristics is derived for control strategy design. First, the quarter-vehicle model with wheel angular speed and vehicle longitudinal speed for the states is established to describe the wheel slip rate dynamics by ignoring suspension dynamics, tire rolling resistance, and tire sideslip characteristics

where

According to Burckhardt tire model,
26

where
The wheel slip rate

Differentiating equation (4) yields

Differentiating equation (5) yields

Differentiating equation (1) yields

Substituting equation (7) into equation (6), we can obtain
Supposing that

where
The proposed method
The overall structure of the robust adaptive wheel slip rate tracking control method with state observer is shown in Figure 1. The outputs of the state observer with the wheel slip rate tracking error for the input are the smoothed wheel slip rate tracking error and the first-order derivative of the smoothed wheel slip rate tracking error, which are used as the inputs of the robust adaptive wheel slip rate tracking control law, fuzzy uncertainty observer, the modified adaptive law for optimal weight vector, and the modified adaptive law for multiplicative uncertainty. The fuzzy uncertainty observer is used for estimating and compensating the additive uncertainty of the system, and the unknown optimal weight vector of the fuzzy uncertainty observer and the multiplicative uncertainty of the system are estimated by modified adaptive laws. Taking into accounting the online estimation and compensation of the additive and multiplicative uncertainties by fuzzy uncertainty observer and modified adaptive laws, the output of the robust adaptive wheel slip rate tracking control law is the derivative of the brake torque, the integral operation of which is used as the input of the controlled plant.
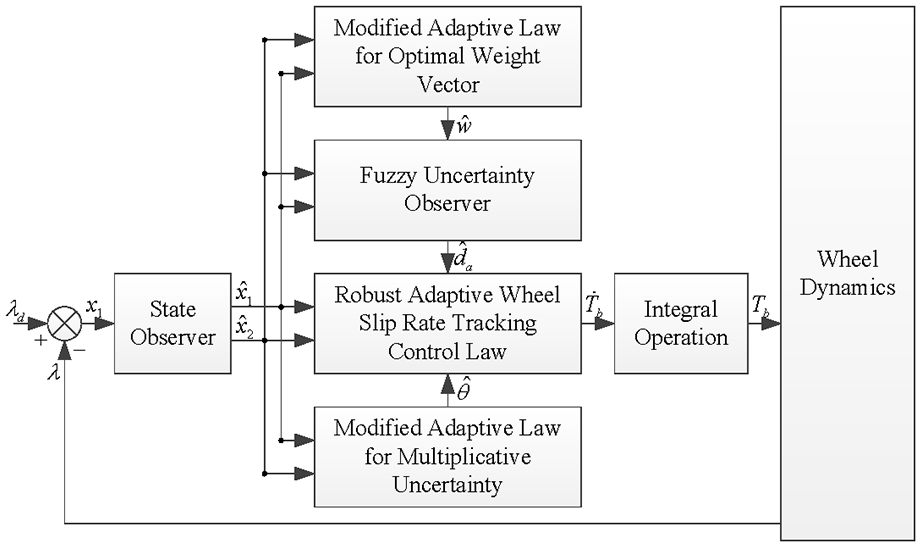
The overall structure of the proposed method.
State observer design
Traditionally, the first-order inertial link with small inertia time constant is used for calculating the first-order derivative of the signal, but the noise amplification effect of the first-order inertial link will lead to excessive noise in the derivative of the signal. Therefore, a modified tracking differentiator described by Theorem 1 is proposed based on a combination of tangent sigmoid function with terminal attraction factor and linear function, and then, the modified tracking differentiator is used as state observer to smooth and estimate the states of the system.
Theorem 1
Let the origin
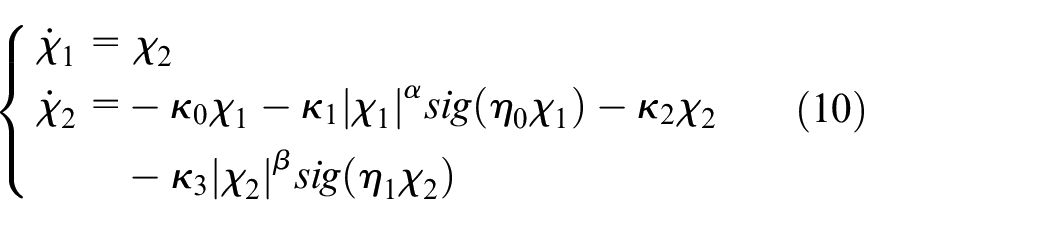
where

The equilibrium point of the system described by equation (10) is asymptotically stable.
Proof
Defining the Lyapunov candidate function as follows

Since the integrable function

According to inequality (13), we can obtain

Differentiating equation (12) with respect to time, we can obtain
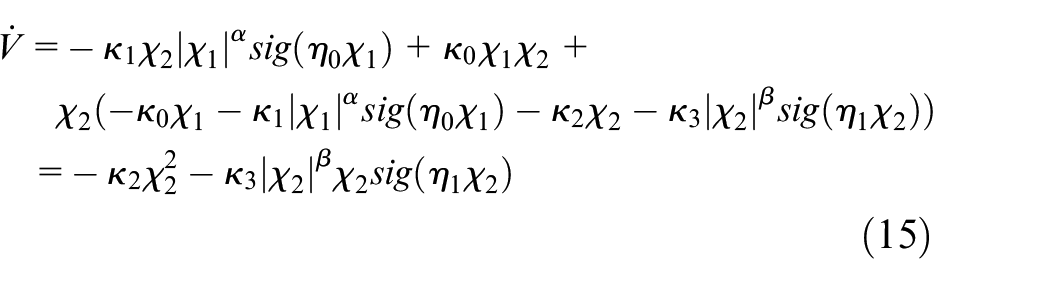
According to equation (15), we can obtain that
The tangent sigmoid function described by equation (11) is shown in Figure 2, it has good linear characteristic when its independent variable is small, and it has the characteristic of global smoothness and saturation when its independent variable is large. Therefore, the tangent sigmoid function is especially suited as the activation function of the terminal attraction factor to improve the convergence rate of the system and avoid the high-frequency chatter of the system.
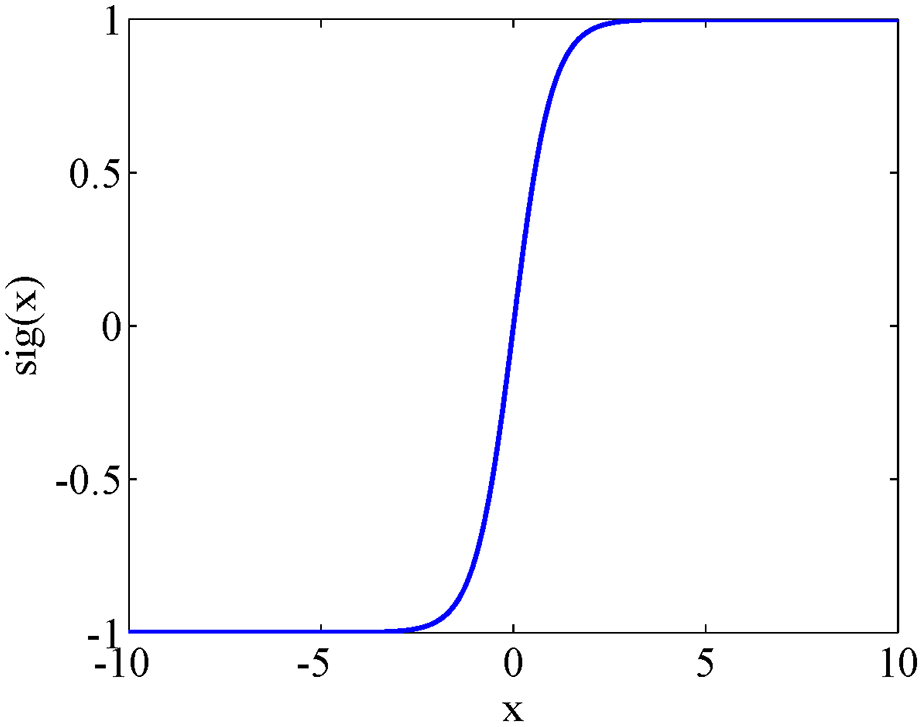
Change process of the tangent sigmoid function.
Moreover, the tangent sigmoid function described by equation (11) can be transformed into Taylor series as follows

where
It can be seen from equation (16) that the tangent sigmoid functions with terminal attraction factors play a dominant role in making the state trajectory of the system converge to the equilibrium point when

According to equation (17), the tangent sigmoid functions with terminal attraction factors can effectively improve the convergence speed when the state trajectory of the system is far from the equilibrium point.
It can be seen from equation (16) that the linear functions play a dominant role in making the state trajectory of the system converge to the equilibrium point when

According to equation (18), the linear functions can effectively avoid chattering phenomenon when the state trajectory of the system approaches the equilibrium point.
According to the Lemma given by Han and Wang, 27 the following state observer is designed based on Theorem 1
where
Control law design
According to the proposed state observer, the wheel slip rate dynamic system described by equation (9) can be modified as follows

where

where
Since any nonlinear function can be approximated with arbitrary accuracy by the fuzzy logic system, 28 we adopt the fuzzy logic system as the fuzzy uncertainty observer to realize the estimation and compensation of the sum of the additive uncertainties of the system. According to weighted average method, the sum of the additive uncertainties of the system can be expressed as

where

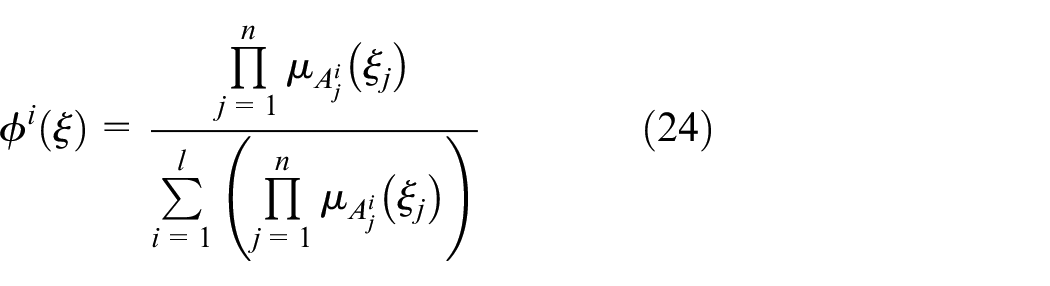
where
Taking into account the compromise between the computational efficiency and the comproximation accuracy of the fuzzy uncertainty observer, the estimate of the system state vector is taken as the input vector of the fuzzy uncertainty observer, and the Gauss function is used as the basis function of the fuzzy uncertainty observer.
Considering the system with the unknown multiplicative uncertainty and the unknown optimal weight vector caused by utilizing the fuzzy logic system to estimate and compensate the sum of the additive uncertainties, the objective of this section is to design a robust adaptive wheel slip rate tracking control law to make the wheel slip rate tracking error satisfy uniform ultimate boundedness. First, the state variables of the system are transformed into the following form to simplify the design process based on backstepping framework, and we can obtain Theorem 2

where
Theorem 2
Considering the system described by equation (21), the robust adaptive wheel slip rate tracking control law is given by

where


where

where
Proof
Defining the Lyapunov candidate function as follows

Differentiating equation (30) with respect to time, we can obtain

Choosing the virtual control input as follows

Substituting equation (32) into equation (31), we can obtain

Augmenting the Lyapunov candidate function defined by equation (30), we can obtain
where
Differentiating equation (34) with respect to time, we can obtain
Substituting equation (22) into equation (35), we can obtain
Substituting the robust adaptive wheel slip rate tracking control law described by equation (26) into equation (36), we can obtain

Substituting the modified adaptive laws described by equation (27) and equation (28) into equation (37), we can obtain

According to equation (38), we can obtain
According to Young inequality, 29 we can obtain



Substituting inequality (40) to inequality (42) into equation (39), we can obtain
Substituting

According to comparison principle, 30 we can obtain
where
According to inequality (45), we can deduce that all signals of the wheel slip rate tracking control closed-loop system is uniformly ultimately bounded, and the estimate of the tracking error satisfies

Since the estimate

It can be seen from equation (47) that the wheel slip rate tracking error is uniformly ultimately bounded. Meanwhile, reducing the initial estimation error of the multiplicative uncertainty of the system and the initial estimation error of the optimal weight vector can reduce the upper bound of the wheel slip rate tracking error.
Simulation results
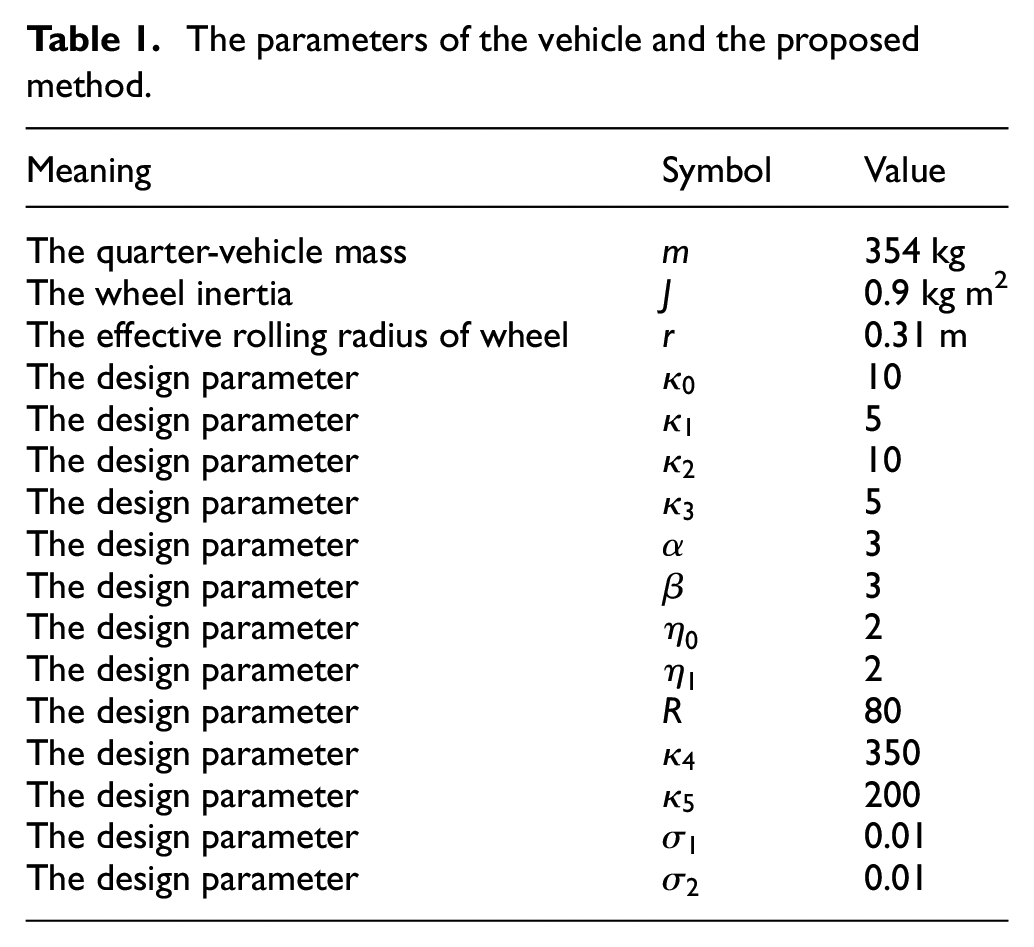
In this section, the full-vehicle dynamics simulation software (MSC CarSim®), which can accurately reflect the whole vehicle dynamics, is used to construct the model-in-the-loop simulation system to validate the effectiveness and feasibility of the proposed robust adaptive wheel slip rate tracking control method. Three maneuvers with desired step signal, desired sinusoidal signal, and desired ramp signal are carried out to compare the proposed robust adaptive wheel slip rate tracking control method with the sliding mode control (SMC) method in terms of robustness, smoothness, and tracking accuracy. In the simulation process, the dimension of the basis function vector of the uncertainty observer is set to 6, the centers of the basis function vector are equally spaced in [0, 0.15; −10, 10], and the widths of the basis function vector are set to 1025. In addition, the vehicle parameters and other parameters of the proposed method are shown in Table 1.
The parameters of the vehicle and the proposed method.
Step signal maneuver
The step signal is usually treated as typical signal to test the steady and dynamic characteristics of the wheel slip rate tracking closed-loop system. Therefore, the step signal maneuver with zero steering wheel angle is implemented on a flat dry asphalt road. In the step signal maneuver, the final value of the desired step signal and the initial vehicle speed are set to 0.09 and 27.78 m/s, respectively. The front left wheel simulation results of the step signal maneuver are represented in Figure 3. As shown in Figure 3(a) and (b), the states
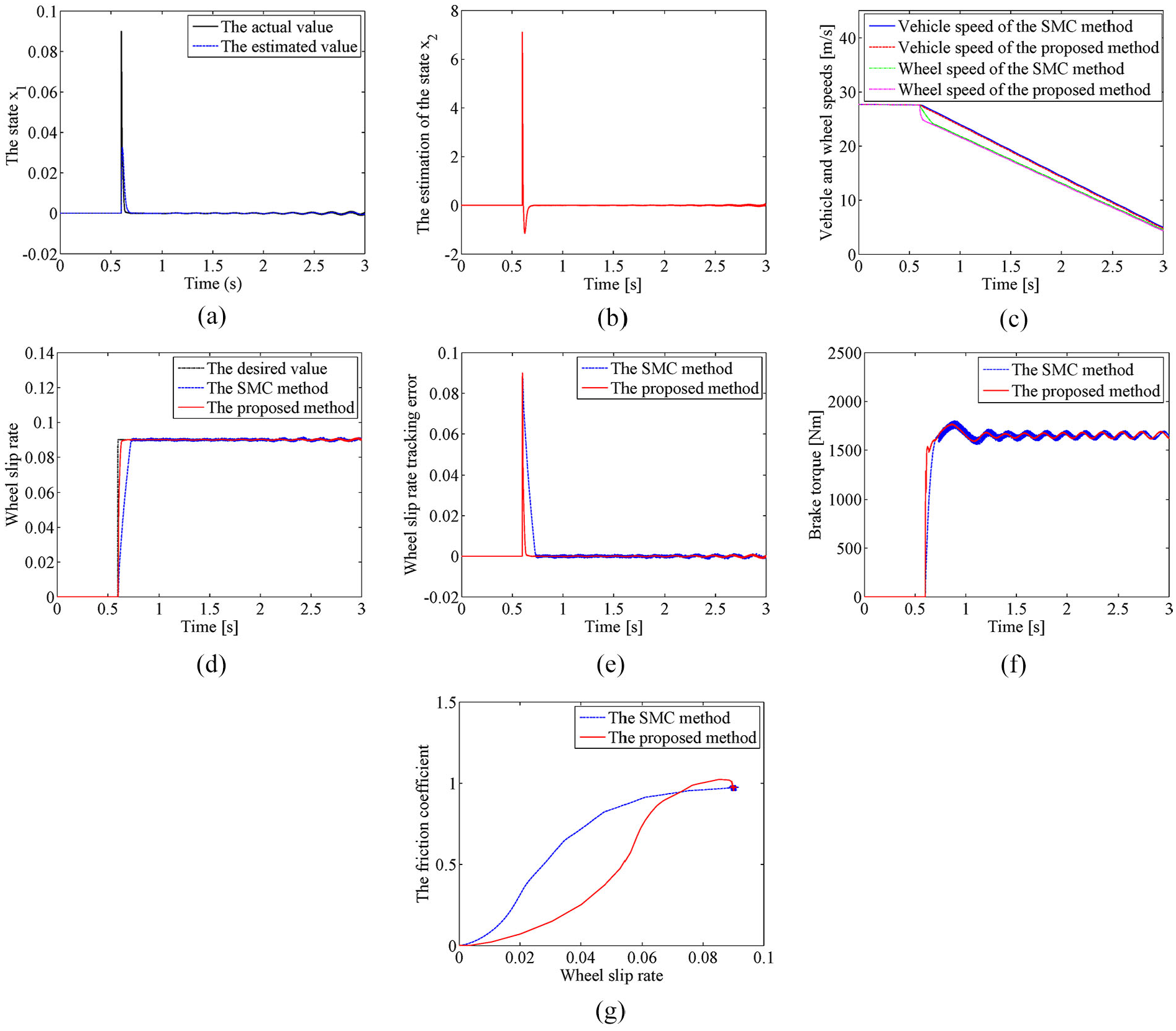
The simulation results of step signal maneuver: (a) the state
Sinusoidal signal maneuver
The sinusoidal signal is usually treated as typical signal to test the delay characteristic of the wheel slip rate tracking closed-loop system. Therefore, the sinusoidal signal maneuver with zero steering wheel angle is implemented on a flat wet asphalt road. In the sinusoidal signal maneuver, the frequency, the amplitude, and the bias of the sinusoidal signal are set to 6.28rad/s, 0.045, and 0.046, respectively, and the initial vehicle speed is set to 30.56 m/s. The front left wheel simulation results of the sinusoidal signal maneuver are represented in Figure 4. As shown in Figure 4(a) and (b), the states
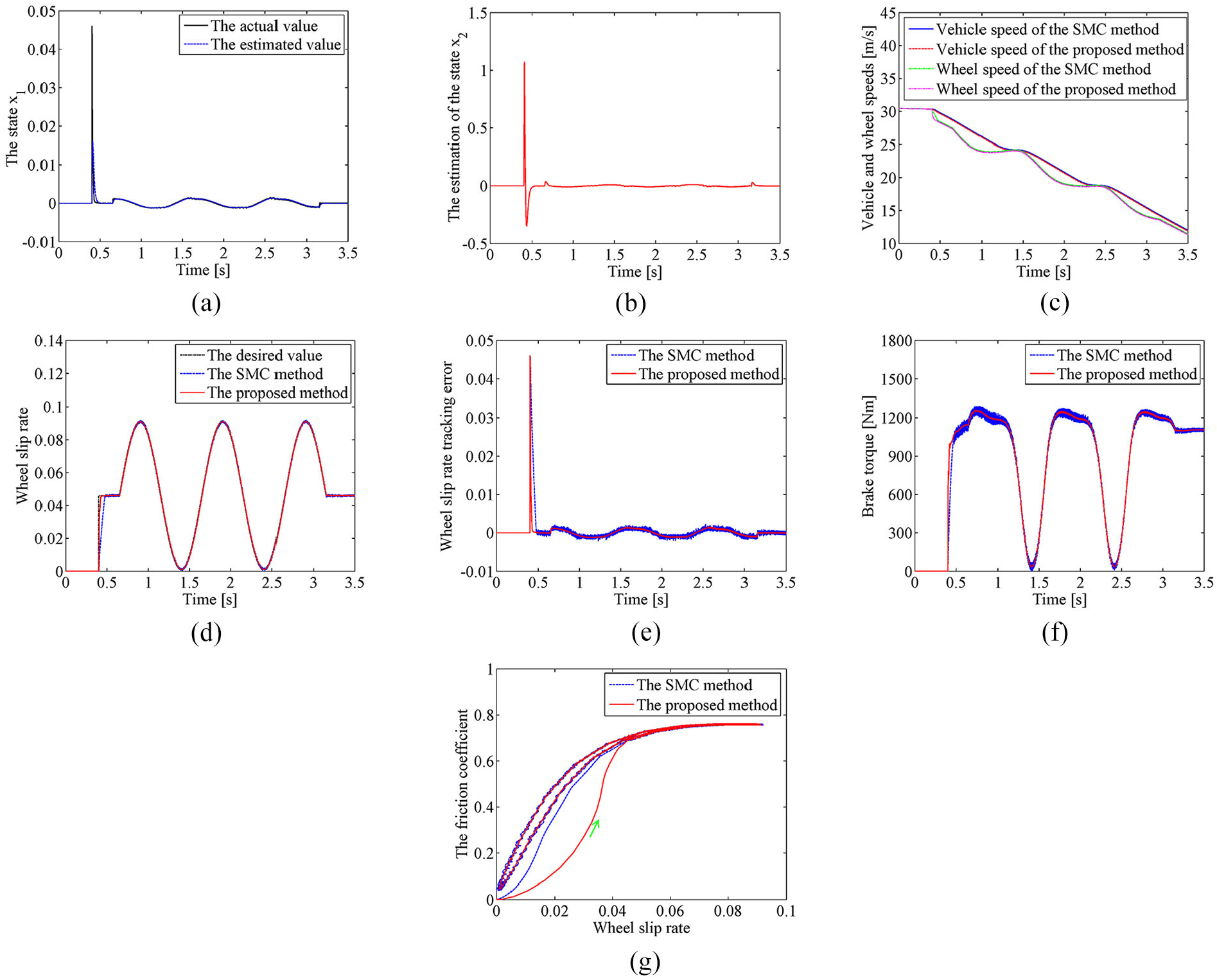
The simulation results of sinusoidal signal maneuver: (a) the state
Ramp signal maneuver
The ramp signal is usually treated as typical signal to test the tracking characteristic of the wheel slip rate tracking closed-loop system. Therefore, the ramp signal maneuver with zero steering wheel angle is implemented on a flat ice-snow road. In the ramp signal maneuver, the maximum value and the ascending and descending slopes of the desired ramp signal are set to 0.9, 0.5, and 0.5, respectively, and the initial vehicle speed is set to 33.33 m/s. The front left wheel simulation results of the ramp signal maneuver are represented in Figure 5. Figure 5(a) and (b) shows that the proposed state observer can estimate the states
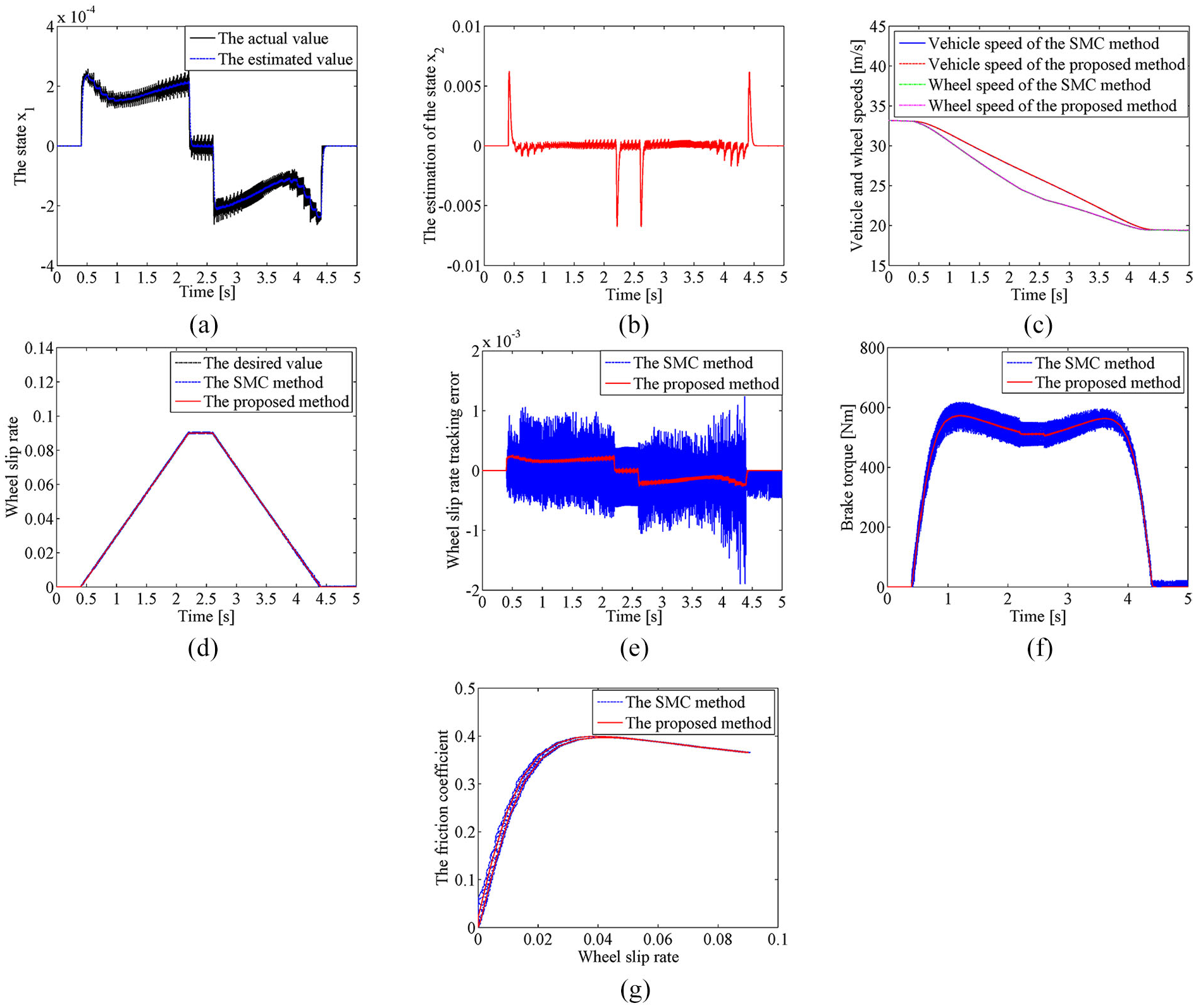
The simulation results of ramp signal maneuver: (a) the state
Conclusion
This article has proposed a novel robust adaptive wheel slip rate tracking control method with state observer. First, a state observer is presented based on the modified tracking differentiator to lay the foundation for the full-state feedback control law design, and the modified tracking differentiator can effectively improve convergence speed and avoid chattering phenomenon by combining tangent sigmoid function with linear function. Second, a robust adaptive wheel slip rate tracking control law with fuzzy uncertainty observer is derived based on Lyapunov-based method. The fuzzy uncertainty observer is used for estimating and compensating the additive uncertainty, and the unknown optimal weight vector of the fuzzy uncertainty observer and the multiplicative uncertainty are estimated by modified adaptive laws. Finally, three maneuvers with typical signals are implemented based on the model-in-the-loop simulation system to validate the effectiveness and feasibility of the proposed method, and the simulation results show that the proposed method has the advantages over the SMC method in smoothness and tracking accuracy.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Nature Science Foundation of China under Grant No. 51575225.