
Abstract
We propose the use of a damping matrix
Keywords
Introduction
Kinematics control is one of the most general issues in robot manipulator technology, in which the focus is on the inverse kinematics solution.1–8 However, it is often difficult to find a suitable solution for redundant manipulators due to high nonlinearity. There have been many studies on classical methods used to find the pseudoinverse solution of various target functions.2,3,6,9–13
The singular value decomposition generalized inverse method (SGIM) is a typical and widely used method for solving inverse motion of redundant manipulators, and it provides a defined Jacobian generalized inverse by singular value decomposition.8,10,14,15 The optimization object of SGIM is the least squares solution with the minimum norm.10,15 However, when the minimum singular value approaches 0, the norm of angular velocity tends to infinity, and the resulting solution has no practical significance for the control operation.
Therefore, another new scheme, the singular robust inverse method (SRIM), has been proposed and widely used in inverse kinematics of redundant manipulators.11–13,16–22 Unlike SGIM, SRIM introduces the damping coefficient λ to avoid problems caused by small singular values and reconstructs a new optimization target function. However, the optimization effect is largely decided by the selection of the damping factor λ and, in recent years, scholars have proposed various definitions of λ. Wampler suggested that λ was a constant. 11 Nakamura and Hanafusa, 17 Kelmar and Khosla, 18 Chan and Lawrence, 19 and others13,20 have proposed a definition of the piecewise function of λ. In addition, intelligent algorithms have also been used in recent years to find better damping factor values. 21
Compared with SGIM, SRIM has achieved better results in solving the inverse motion of trajectory tracking, but there also exist some shortcomings. They are as follows:
A uniform value of damping factor λ is usually employed in SRIM solutions without considering the optimization requirements of each singular value. As a result, the over-optimization of large singular values results in redundant errors and singularities.
In order to effect the change of joint angle Δθ from tk to tk+1 during the iteration process, the Jacobian matrix is usually considered unchanged and the Jacobian matrix at tk is considered an approximation substitution value. Once the manipulator passes a singular point between tk and tk+1, the singular values of the Jacobian matrix will change significantly and the approximation will produce a larger terminal error. The error can be eliminated by employing a smaller sampling interval, but more computing resource will then be consumed. Obviously, neither SRIM nor SGIM considers the effect of the approximation.
To eliminate the defects of SRIM, we propose to introduce the damping matrix
This article introduces the modified coefficient matrices to overcome the shortcomings of the SRIM. An introduction to the SGIM and SRIM models is shown in section “Preliminaries” and the new methodology ESRIM is illustrated in section “New singularity-avoidance scheme.” In section “Simulation analysis verification,” the modified method is applied to a 7-axis manipulator and a 10-axis manipulator, respectively, for validation and comparison. Section “Conclusion” presents the conclusions drawn from this work.
Preliminaries
The kinematics study of manipulators provides the mapping relationship between joint space and manipulation space 4 and is highly non-linear for redundant manipulators. Therefore, it is necessary to linearize the non-linear motion to effect satisfactory motion control.
The common method of linearization is to establish the equation with the Jacobian matrix. 23 If divided by time, the linear relationship of the corresponding velocity can be obtained as follows

where

where i = 1, 2,…, m and j = 1, 2,…, n.
According to the theory of linear algebra,
24
when

where
The differential form of formula (1) can be written as

Then there is

where
SGIM

where
For the full-row rank matrix, the optimization of the equation (1) with the SGIM is the least squares solution of minimum norm and can be expressed as
The least solution norm and the least terminal error norm, corresponding to equation (7), can be expressed as


where
SRIM
The classical SRIM, also known as the damped least squares method, 12 has improved the membership of the minimum norm and least squares in the optimization target in equation (7) to be a parallel relationship. Both can be balanced by employed damping factor λ. Therefore, a new optimization target function is constructed as follows

Then, the optimization of the solution of equation (1) can be expressed as

The solution norm


with the parameters defined as above. From the formula (12), it can be seen that the introduction of the damping factor λ can keep the norm
Iterative solving process
The inverse motion solutions based on the Jacobian matrix essentially constitute an iterative process, in which the angular variation can only be solved in a stepwise fashion. 27 The main procedural steps are as follows
The pose difference value (Δx) is calculated based on the initial pose (xt) of the current moment and the desired pose (xt+1) of the next moment; Δx = xt+1 – xt.
According to the inverse solution formula (5), the corresponding joint angle change
The joint angle
The actual position
The end error
Thus, in Step (2), the following approximation formulas should be used

New singularity-avoidance scheme
In this work, the inverse solution of equation (1) is obtained with an improved numerical method based on SRIM, named ESRIM. The optimization model in ESRIM can be expressed as follows

In equation (15), two modified coefficient matrices

The damping matrix


Since

The extended singular robust inverse of the Jacobian matrix corresponding to equation (19) is

Furthermore,

Then, for any Jacobian matrix


The approximate modified Jacobian matrix

The pre-factor matrix

where α0 is an adjustable critical pre-factor. In order to prevent the singularity caused by the small singular values of the matrix, the truth Jacobian matrix

The relative error

When the value

Obviously, when βi = 0 (i = 1, 2,…, r), formula (28) reaches its minimum value of 0. A non-zero value of βi helps avoid the singularity caused by small singular values, but it also leads to a larger terminal error. In this work, βi is defined as a piecewise function of σi as follows

where i = 1, 2,…, m, and σ0 is the smallest singular value allowed. Equation (29) avoids the terminal error caused by over-optimization when singular values are large enough.
For the full-row rank Jacobian matrix


where
In the process of trajectory tracking, with the solution error,

The stability of the proposed method is also analyzed. According to the stability criterion,28–30 the Lyapunov function 29 is defined as

Then, there are

where Ki and Kp are both positive constant coefficients and are determined by the actual speed. V is always positive definite. Whether positive or not,
Simulation analysis verification
Taking the 7-axis manipulator “YL101” (designed in our laboratory) as the object, the effects of ESRIM are studied and compared with those of SGIM and SRIM; the latter are well known as traditional methods providing good inverse solutions of trajectory tracking.
“DH” method was first proposed by Denavit and Hartenberg. 31 It is the most common and mature method to describe the structure of chain manipulator. 32 The structure of the 7-axis manipulator “YL101” is shown in Figure 1 and the DH structural parameters are listed in Table 1.

Structural diagram of “YL101” 7-axis manipulator.
DH structural parameters of “YL101” manipulator.

Example 1: linear trajectory
In the first simulation example, the tracking trajectory of the manipulator is a spatial straight line LS, ranging from the initial point Sp (982.9, −399.6, and −324.3 mm) to the end point Ep (394.5, −399.9, and −441.4 mm), and with the corresponding RPY 33 attitude angle ranging from Sa (–45.0°, 37.6°, and 49.3°) to Ea (–42.4°, 148.8°, and −163.8°). The established end precision requires that the position be controlled to within 0.5 mm. Ki and Kp are 1.0 and 0.125, respectively.
As a result of the accuracy requirement, the step size is set as 0.05 mm. The SGIM has no specific parameter settings. In SRIM, the damping coefficient is set as

Terminal errors of different optimizing methods in spatial linear trajectory (a of the first singular point, b of the second singular point).
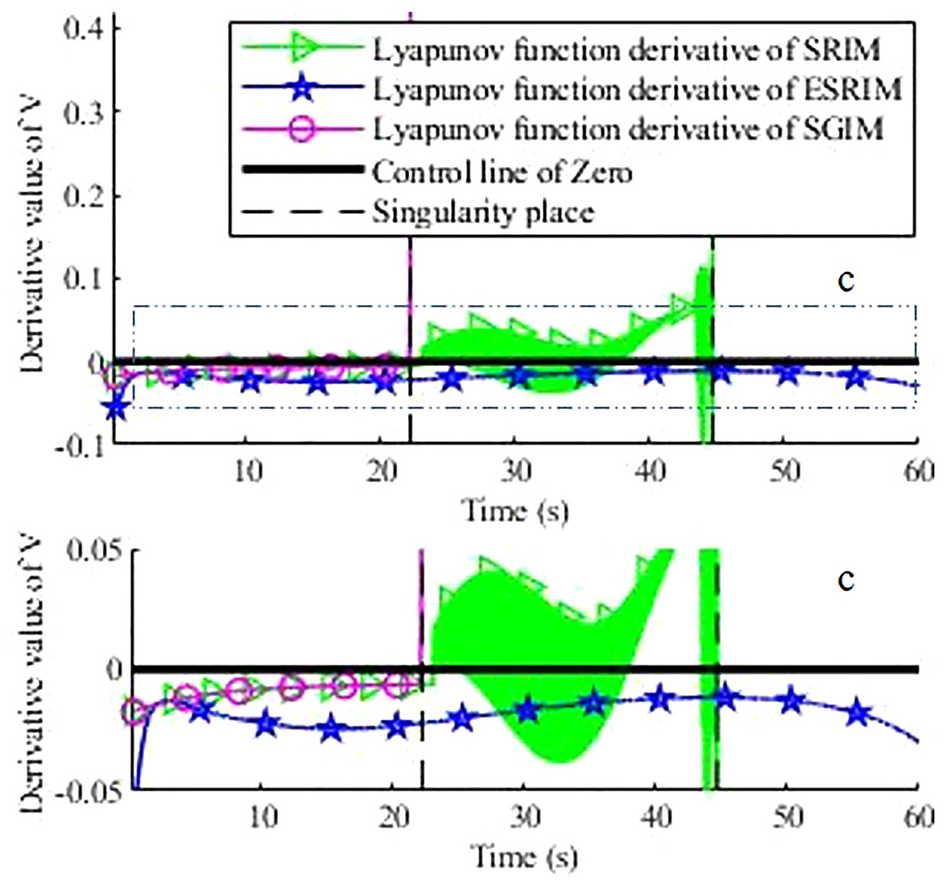
Lyapunov objective function derivative values with different optimizing methods in spatial linear trajectory (c of V derivative values in enlarged area).
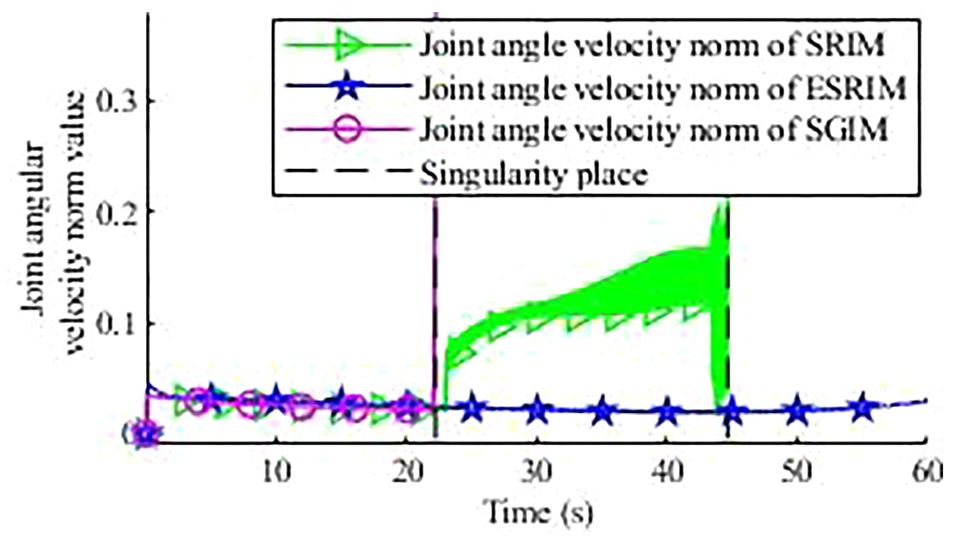
Joint angular velocity norm of different optimizing methods in spatial linear trajectory.

Least singular value of different optimizing methods in spatial linear trajectory.

Position and posture changes of different optimizing methods in spatial linear trajectory (a) SGIM, (b) SRIM, and (c) ESRIM.

Joint angles value of ESRIM methods in spatial linear trajectory.
The terminal errors resulting from the three different methods are compared in Figure 2. Before the manipulator moves close to the first singular point, all three methods obtain good trajectories with acceptable small terminal errors. However, only ESRIM smoothly finds the solution over the entire process. Figure 2(a) shows the vicinity of the first singular point SP1. When the manipulator approaches SP1, the terminal error of the SGIM solution oscillates rapidly and then diverges until it exceeds the allowable error value; this leads to the failure of the whole optimization process. Adding the damping factor λ allows SRIM to find the solution around SP1. However, large oscillation occurs in the subsequent SRIM solution, and this violates the accuracy requirement around point SP2 (Point b in Figure 2). Compared with the former two methods, ESRIM obtains the solutions of SP1 and SP2 simultaneously. The terminal error does not exhibit oscillation with long duration or large amplitude and shows better optimization performance as the optimization process continues.
Figure 3 shows the Lyapunov objective function derivative values
In addition to the optimization of terminal error, the norm of joint angular velocity should be small enough to be practical. As shown in Figure 4, the joint angular velocity for SGIM increases rapidly at the singular point SP1, and this is consistent with the variation in its error. The same relationship can be observed for joint angular velocity and terminal error with SRIM. Compared with SGIM and SRIM, the joint angular velocity of the proposed ESRIM is much more stable and remains a low level even at both of the singular points.
Equation (8) indicates that smaller singular values will lead to larger joint angular velocity and reduced flexibility of the manipulator. Therefore, for a certain terminal position, the least singular value σm of the Jacobian matrix should be as large as possible. Figure 5 shows the variation of the least singular values with the three optimization methods, and ESRIM produces the largest σm during the entire iteration process. These results show that ESRIM improves the flexibility of the manipulator.
Figure 6 shows the track of the manipulator when different optimization methods are used to produce a spatial linear trajectory. The three tracks are generally consistent, but only the ESRIM successfully passes both singular points and completes the whole trajectory.
In addition, Figure 7 shows the trends in the angles of each joint during the optimization with ESRIM. All the joint angles change smoothly without sharp variations, and they remain within the range limits.
Example 2: curve trajectory
In the second example, the tracking trajectory is set as a spatial arc LC1, ranging from the initial point Sp (1080.6, 89.7, and 752.7 mm) to the end point Ep (632.1, 89.7, and 970.9 mm) with the corresponding RPY attitude angle ranging from Sa (−46.7°, 123.7°, and −147.9°) to Ea (−123.0°, 106.7°, and −93.0°). The end precision is limited to 0.5 mm of the target position, with circle center of OC (830.3, 457.1, and 1065.2) and normal vector of nc (0, –1, 0).
Because of the accuracy requirements, the arc-length step size is set as 0.05 mm. SGIM has no specific parameter settings. In SRIM, the parameters are set as

Simulation results of 7-axis manipulator with different optimizing methods in spatial arc trajectory: (a) terminal error value of different optimizing methods, (b) joint angular velocity norm value of different optimizing methods, (c) least singular value of different optimizing methods, and (d) position and posture changes of ESRIM.

Lyapunov objective function derivative values with different optimizing methods in spatial arc trajectory (d of V derivative values in enlarged area).
As with straight lines, tracking trajectories of spatial curves are also among the most common basic tasks. Taking arc trajectory LC1 as an example, the optimization results with SGIM, SRIM, and ESRIM are studied. As compared with straight lines, tracking spatial curves are more difficult. From Figure 8, it can be seen that the singularity of SGIM occurs shortly after the simulation begins. At the singular point, the terminal error breaks through the allowed limit and the tracking fails. SRIM with a damping factor passes through the initial singularity, but the terminal error oscillates severely during the iteration process. When approaching the next singularity point, the terminal error experiences a sharp divergent oscillation and this leads to tracking failure. However, ESRIM optimization exhibits the best result. Generally, ESRIM obtains lower joint angular velocities and larger singular values, corresponding to better practicability and flexibility. As with the results in Example 1, the terminal error of ESRIM is sometimes higher than SGIM and SRIM, but the error still meets the accuracy requirement. Moreover, only ESRIM passes through both two singular points successfully and obtains joint angle solutions during the whole curve-tracking process. As shown in Figure 9, only the Lyapunov derivative value of ESRIM is negative and satisfies the stability requirement. It can be seen that ESRIM again exhibits better optimization performance in this curve trajectory tracking for the 7-axis manipulator.
Example 3: 10-axis manipulator
In this example, the 7-axis is replaced with a multi-axis redundant manipulator to validate the performances of the different methods. The DH structure parameters of the 10-axis manipulator are listed in Table 2.
DH structural parameters of 10-axis manipulator.

The optimization is applied to spatial arc curve LC2, the RPY attitude angle extends from Sa (84.5°, 84.0°, and 90.4°) to Ea (120.6°, 40.9°, and 140.8°), and other parameters are the same as those described in Example 2. The arc-length step size is also set to 0.05 mm. The parameters of SRIM are set as λ0 = 0.01 and the parameters of ESRIM are α0 = 1.7 and σ0 = 1.3. The simulation results are shown in Figures 10 and 11.

Lyapunov objective function derivative values of 10-axis manipulator with different optimizing methods in spatial linear trajectory (e of V derivative values in enlarged area).

Simulation results for 10-axis manipulator with different optimizing methods in a spatial arc trajectory: (a) terminal error value of different optimizing methods, (b) joint angular velocity norm value of different optimizing methods, (c) least singular value of different optimizing methods, and (d) position and posture changes of ESRIM.
As with the 7-axis manipulator, the SGIM solution for the 10-axis manipulator also becomes singular near the beginning of the simulation. SRIM fails to perform better than does SGIM in the tracking process for trajectory LC2, while the proposed ESRIM performs well. In the limited range, the terminal error is smooth and continuous, and no overall oscillation occurs. The least singular value at the same position is the largest while the joint angular velocity is the smallest. Therefore, the ESRIM shows better optimization performance for the multi-axis redundant manipulator. In addition, the Lyapunov derivative value of ESRIM is negative, which is as expected.
Conclusion
The conclusions of this study are as follows:
To address the problem that the manipulator’s singularity of different joints cannot be adjusted separately by the classical SRIM, a scheme in which the damping factor matrix
Large values of manipulator terminal error and joint angular velocity, caused by the singularities in three optimization methods are analyzed, and the semi-empirical selection principle of
Three simulation methods are compared in the tracking of spatial straight lines and curved trajectories. The simulation results show that the ESRIM exhibits better optimization performance and stability as the process continues. In the prescribed range, the terminal error does not show oscillation with longer duration or large amplitude. Meanwhile, under the same conditions, the least singular value of ESRIM is the largest and the joint angular velocity is the smallest, which is as expected.
The different optimized methods have also been applied with a 10-axis manipulator, and positive results are obtained with ESRIM; this indicates that the extended robust inverse method for multi-axis redundant manipulators has broad applicability and can avoid singularity. However, it should be noted that all three methods based on singular value decomposition of the Jacobian matrix require long calculation times, which is deserved to research and this should be investigated and improved in future work.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Shenzhen Science and Technology Project (grant no. JCYJ201803 05164217766), the National Science Foundation of China (grant no. 518775505), and the Fundamental Research Funds of Shandong University supported this work