
Abstract
In order to improve the swimming performance of a paddle-propelled crablike robot, the sequence and parameters of swimming gait are planned according to the bionic swimming mechanism. Based on the bionic prototype of Portunus trituberculatus, the structure scheme of a leg–paddle hybrid driven robot is proposed with the functions of walking on land, crawling on seabed, and swimming underwater. By analyzing the underwater propulsion mechanism of single paddle and hydrodynamic performance of double paddles cooperatively propulsion, four direct swimming gaits are planned and the corresponding attitude changes are theoretically analyzed. Then, the numerical simulation and direct swimming experiments are carried out to verify the effectiveness of proposed gaits and correctness of force analysis. In alternate swimming gait of lift-based mode, the robot swims forward in a rolling attitude, with an advantage of the minimum water resistance and the optimum swimming velocity and efficiency. The influence of flapping frequency and relative phases of paddles on the swimming velocity shows the trend of raise first and then fall.
Keywords
Introduction
Recently, the shoal between ocean and land has attracted increasing attention for scientists who devote themselves to scientific research, environmental monitoring, and energy exploration, which can promote the development of shoal operating robots.1,2 The driving form of shoal operating robot can be divided into single type and combination type. 3 However, the single driving type can hardly simultaneously satisfy the demand of flexibility, agility, and propulsion velocity when robot moving underwater and on land. To realize the effective motion of shoal operating robot in complex amphibious environment, the research of a new-type coupling driving mechanism has gradually become a hot topic.4–6 Based on this, the leg–paddle hybrid driving crablike robot is proposed in this article by taking Portunus trituberculatus as bionic prototype, combining the leg’s crawling mode and paddle’s flapping mode, by which the robot can walk on land or seabed and swimming underwater. According to the operation environment and task requirements, the robot can select walking mode or swimming mode independently with no need to replace propulsion mechanism. This method improves the motion efficiency of the robot and also provides a new way of thinking and choice for the bionic designing of shoal operating robot.
As a typical second-class crustacean aquatic organism, the P. trituberculatus can swim underwater using its paddle-like swimming legs. Due to the complex motion process, irregular and uneasy to be observed surface shape of swimming leg, there are few researches which focus on in vivo experiments and numerical simulations to study the motion mode and physiological property. In addition, the research of swimming leg’s propulsion mechanism is not as deep as that of fin propulsion and flapping wing propulsion. However, the similar analysis methods can be applied in the study of crablike robot’s swimming paddle such as the modeling and observation of flow, numerical method, and hydrodynamic experiment.7–9 The detailed analysis comparing fin propulsion and flapping wing propulsion was carried out by Ding Hao. The results show that the hydrofoil has a larger aspect ratio, and most of them are rigid or semi-flexible, which provides the main propulsion. But the role of pectoral fin is maneuvering and balancing the body. It has a smaller aspect ratio and is mainly a thin and short flexible structure. Another difference is the different swinging directions and amplitude of joints. 10 Kato 11 studied the hydrodynamic performance of 2-degree-of-freedom (DOF) rigid pectoral fin using unsteady vortex lattice method (UVLM) and came to a conclusion that the phase difference between flapping motion and feathering motion has a great influence on average propulsion and efficiency. Numerical simulations of hydrodynamic performance of 3-DOF rigid pectoral fin and the corresponding experiments in static water and dynamic water were carried out by Suzuki. The results show that the efficiency of lift-based mode reached 40%, which is much higher than that of drag-based mode. In open water, the greater propulsion can be produced in lift-based mode. However, the greater propulsion occurs in static water in drag-based mode. 12 Lindsey 13 calculated the hydrodynamic force of 2-DOF rigid pectoral fin combining with rowing motion and feathering motion based on the blade element theory, and found that better maneuverability can be obtained by adjusting the phase difference of two joints. The hydrodynamic performance of 2-DOF flapping wing was investigated by Anderson et al., which shows that leading-edge vortex enhances with the increase in dimensionless number St. When 0.2 < St < 0.5 and 7°< αmax < 50°, trailing vortex shed from the wing in form of reverse Karman vortex street and the corresponding propulsion efficiency is optimum. 14
Most of the literature works above focus on the hydrodynamic modeling and underwater propulsion mechanism analysis of single paddle, but the influence of appendages and multi-paddle collaborative propulsion on the hydrodynamic performance of single paddle are not considered, and few researches on bionic flapping wing propulsion system are carried out. Based on the analysis of hydrodynamic performance of single paddle, the mechanism of multi-paddle collaborative flapping and underwater floating gait planning are studied in this article. Efficient underwater floating gaits suitable for the crablike robot are proposed. The research can provide a new idea for the underwater floating gait planning of similar underwater robots.
On the basis of underwater propulsion mechanism of single paddle and hydrodynamic performance analysis of cooperatively propulsion of double paddles, four direct swimming gaits are planned, which include synergy swimming gait and alternate swimming gait based on lift-based mode, and synergy swimming gait and alternate swimming gait based on drag-based mode to improve the swimming performance of crablike robot. And then, the instantaneous attitude changes of these gaits are theoretically analyzed. At last, the effectiveness of the proposed gaits is verified by numerical simulation and experiments of robot’s self-propelled swimming.
The article is organized as follows. In section “Leg–paddle hybrid driven crablike robot,” the crablike robot system design is introduced. The underwater propulsion mechanism of single paddle and hydrodynamic performance of cooperatively propulsion of double paddles are researched in section “Hydrodynamic performance analysis of swimming paddle.” The floating gait sequence and parameters are planned in section “Floating gait planning of crablike robot.” In section “Simulation and experimental verification,” results of simulation and experiment are presented to demonstrate the validity of proposed floating gait.
Leg–paddle hybrid driven crablike robot
Based on the analysis of morphological structure and leg–paddle compound propulsion mechanism of sea crab, the leg–paddle hybrid driven crablike robot is designed in this article, which combines the characteristics of morphological bionic and functional bionic, as shown in Figure 1. The robot can walk on land and seabed using the front three pairs of walking legs and can swim underwater with the flapping of dactylus. It is composed of the structure, electronic control cabin (sealed cabin), six series–parallel hybrid structural walking legs, two modular swimming paddles, buoyancy adjusting device, and anti-drag shell. The body is a hollow structure except for control cabin, which can equip with various sensors according to corresponding task—such as GPS, electronic compass, gyroscope, water leakage detection module, wireless transmission module, depth gauge, miniature underwater camera, and micro sonar.
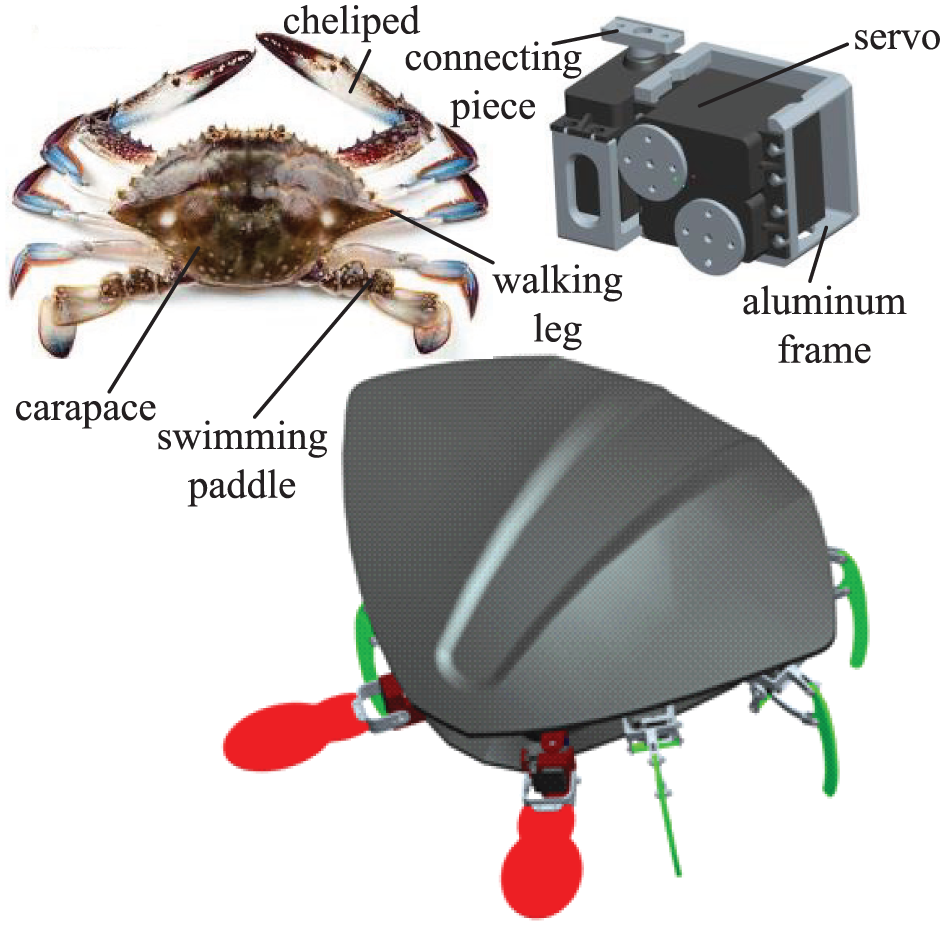
3D model of crablike robot.
The robot’s 24 joints are all driven by waterproof steering engine. And, the control system in sealed cabin communicates to the actuator through watertight cable. The six walking legs and a pair of swimming paddles are arranged in star shape which is symmetric about the body to avoid interference of the adjoining walking legs in fore-and-aft direction. The shell is designed as streamline structure to reduce the motion drag. The robot is 710 mm long, 350 mm wide, 230 mm high, and weighs about 6.7 kg. The length-to-width ratio k of robot is 2.01, bigger than 1, which is same with that of P. trituberculatus. And, this shell structure can reduce the motion drag and is good for lateral walking.
The three-dimensional (3D) model of swimming leg is shown in Figure 2. Four waterproof servos are combined into an actuator to drive the hydrofoil. These servos are functioned to generate the feathering, lead-lag, flapping, and rowing motions. The length of swimming leg is 280 mm, and the proportion of coxa, basis, propus, and dactyl are 0.21, 0.11, 0.43, and 0.25, respectively. The rotations of TC, CB, BP, and PD joints are controlled by the servos with angle span φTC (−90°≤ φTC ≤ 90°), φCB (−45°≤ φCB ≤ 90°) and φBP (−90°≤ φBP ≤ 45°).

3D model of swimming leg.
Hydrodynamic performance analysis of swimming paddle
Motion model of swimming paddle
Take the left paddle for example (subscripts l and r mean left and right paddle, respectively), the body coordinate system is defined as G-xyz, the inertial coordinate system is defined as Ol1-xl1yl1zl1, and the local coordinate system of patella and dactylus is defined as Ol4-xl4yl4zl4, as shown in Figure 3.

Coordinate systems of swimming paddle.
The three rotational DOFs of paddle’s motion model are feathering motion, rowing motion, and flapping motion, which rotate around TC joint, CB joint, and BP joint, respectively. And, they are driven by three steering engines independently. In this article, the 3-DOF motion of paddle is defined by multi-vibration coupling resonance model as

In which, f is the flapping frequency of joint.
Governing equation
The variation of flow field caused by the flapping of swimming paddle is non-stationary turbulent motion, which is overlapped by many different size of vortex. The viscous unsteady incompressible Reynolds-averaged Navier–Stokes (RANS) equation is solved in this article to analyze the hydrodynamic and flow field performance of flapping paddle. The continuity equation and momentum equation is described as


In which,
Considering the renormalization group (RNG) k-ε turbulence model can simulate well the flow field characteristics of swimming paddle, so this model is selected in this article, and its transport equation is

in which, k presents turbulence energy and ε presents turbulent dissipation energy.
Hydrodynamic performance of swimming paddle
The 2-DOF motion of swimming paddle is combined with feathering and flapping motion. In order to study the generation mechanism of hydrodynamic force, the evolution of flow field and action mechanism of paddle in lift-based mode and drag-based mode is numerically simulated using Fluent software and dynamic mesh method. The spring-based smoothing and Laplace local re-meshing method were applied to update the dynamic mesh during the motion of the flapping hydrofoil. To smooth the mesh, a value of 0.5 was used for the boundary node relaxation, and a standard value of 0.001 was used for the convergence criterion and 0.01 for the spring constant factor. The initial environment is static water. The simulation step is 0.0025 s, and the operation time is 24 h. The paddle tip motion trajectory and speed of angle of attack of two feature points for 2-DOF paddle are shown in Figure 4.
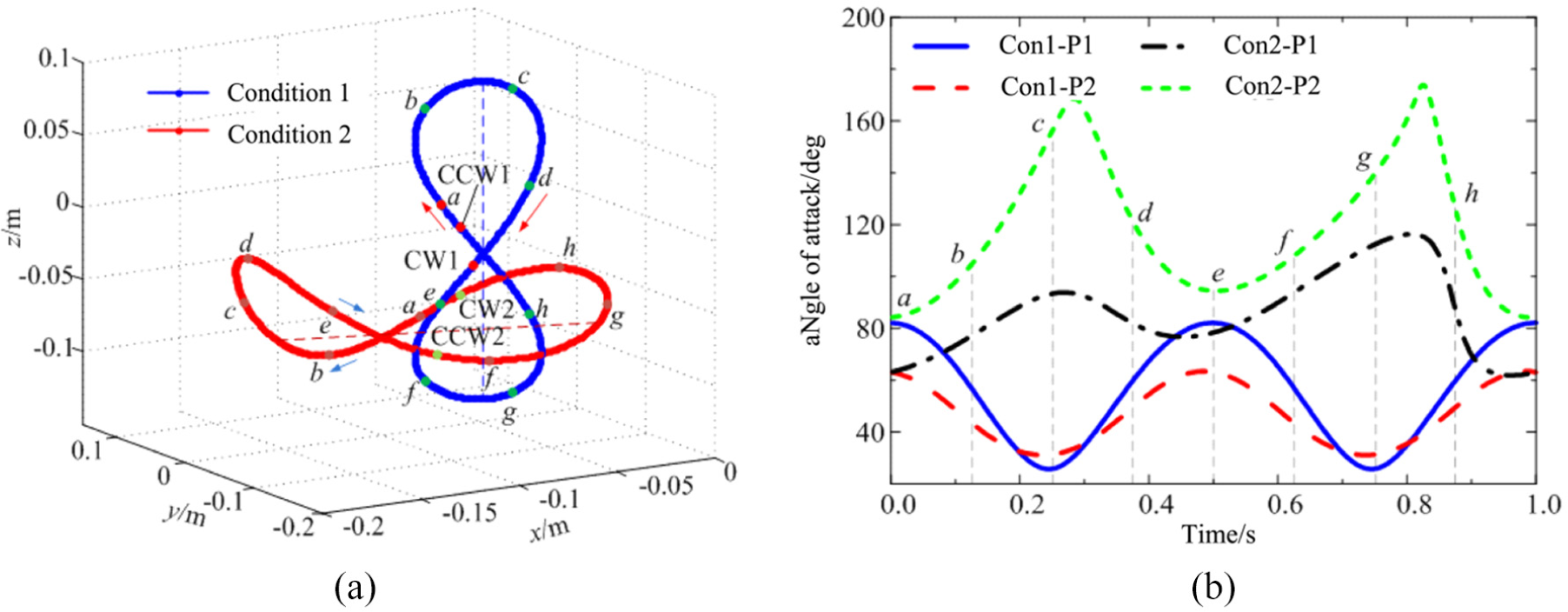
(a) Wing tip trajectory and (b) angle of attack of reference points for swimming paddle with 2 DOFs.
From Figure 4(a), the trajectory of paddle tip in lift-based mode is approximately spatial “8” shaped and its centerline is parallel to z-axis. This result is similar to the motion trajectory of turtle flexible forelimbs studied by Low and of bass pectoral fins studied by Suzuki. 15 So, this type of trajectory of paddle tip is the common motion mode used by hydrofoil-driven creature. The trajectory of paddle tip in drag-based mode is also approximately spatial “8” shaped and bilaterally symmetrical about center point. The only difference to lift-based mode is that the centerline of the trajectory is vertical to the z-axis. From Figure 3(b), there are two peaks in the velocity angle of attack curves of the characteristic points in one flapping period of the two modes. And, their periods are all half of the flapping period. Moreover, the velocity angle of attack of the characteristic point in drag-based mode is much larger than that of lift-based mode.
In order to study the influence of phase difference

Effects of
In Figure 5(a),
In Figure 6(b), when
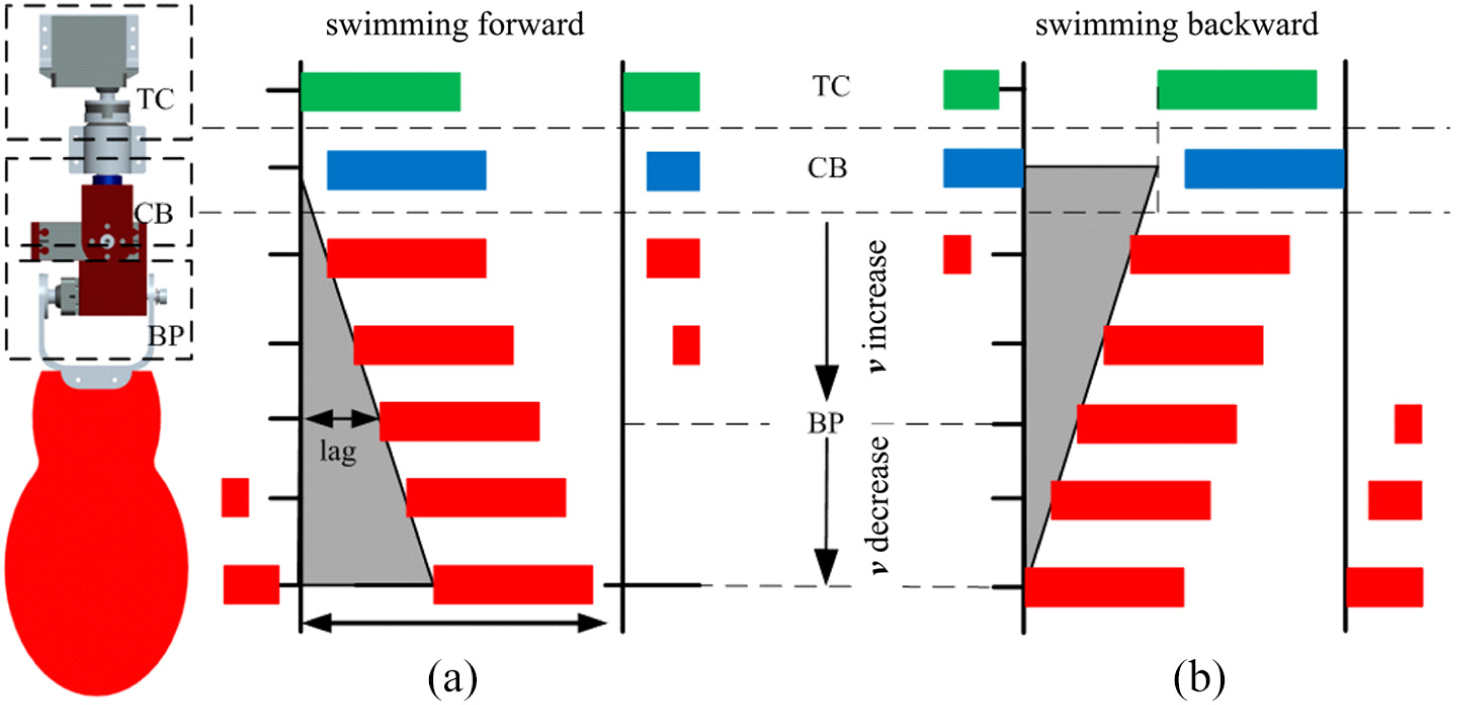
Phase relationship of joints for swimming forward and backward in lift-based mode: (a) rotating advanced mode and (b) rotating lagged mode.
Floating gait planning of crablike robot
Floating gait planning
Due to length limitations, the floating gait is first planned taking lift-based mode as an example below. The same planning method can be applied in drag-based mode. For the robot swimming by flapping hydrofoils, the motion law of hydrofoils must satisfy certain conditions to achieve straight-line swimming. Such as if the pectoral fin propelled robot fish want to keep straight-line swimming, the flapping frequency, amplitude, initial phase angle, and initial phase offset angle of the two pectoral fins should be the same value.
To achieve forward or backward swimming of the crablike robot, the following two conditions should be satisfied according to the numerical simulation results in section “Hydrodynamic performance of swimming paddle,” which are (1) average thrust produced by two paddles in a flapping period is positive (robot swimming forward) or negative (robot swimming backward), and the average lift force is 0. (2) The flapping frequency and amplitude of left paddle and right paddle should be the same. To achieve condition (1), the three joints’ phases should satisfy the relationship shown in Figure 6. That is to say, for lift-based mode, the phase of TC joint should be ahead of that of CB joint and BP joint. And with the increase in relative phase between TC joint and BP joint, the robot’s swimming speed increases first and then decreases. When the leading phase lag = π/2 (TC joint is π/6 ahead of CB joint), the robot reaches the fastest swimming speed. This motion mode is defined as “Rotating Advanced Mode” in this article. For the backward swimming, the average thrust of paddle in one flapping period should be negative. The corresponding phase relationship of each joint is shown in Figure 6(b). At this time, the TC joint’s phase is behind of BP joint. And, the backward swimming speed also increases first and then decreases with the increase in the lag phase. When lag = −π/2 (TC joint is π/6 ahead of CB joint), the robot achieves the fastest speed. This motion mode is defined as “Rotating Lagged Mode”
In order to realize the direct swimming of the robot, two different swimming gaits are proposed in this article, which are the “synergy swimming gait” and “alternate swimming gait “. The former refers to the two paddles having the same flapping frequency, amplitude, initial phase angle, and initial phase offset angle, and they flap synchronously, which are mirror symmetrical about the robot’s sagittal plane.
The force analysis of the synergy swimming gait in lift-based mode is shown in Figure 7(a). The lateral force produced by two paddles can be canceled out, that is, Fly = Fry, which satisfies the robot swimming condition on sagittal plane. The instantaneous net lift force is not 0, so periodic pitching moment Mpitch will be acted on the robot, and it will swim forward like a wave with repeatedly pitching movement.

Force analysis of swimming forward gait in lift-based mode: (a) synergy swimming gait and (b) alternate swimming gait.
The alternate swimming gait refers to two paddles having the same flapping frequency and amplitude, but their phase difference is π. When the left paddle flaps down, the right paddle flaps up. On the contrary, the left paddle flaps up while the other flaps down. The two paddles flap up or down alternately. According to the force analysis shown in Figure 7(b), the lateral forces of two paddles also can be canceled out. The difference to synergy swimming gait is that the lift forces produced by two paddles are in opposite direction. The robot will not in act periodic pitching moment, but periodic rolling moment. So, it will swim forward in waves with repeatedly rolling movement.
Hydrodynamic analysis of swimming forward gait
Because of the periodic fluctuation characteristics of the hydrodynamic produced by paddles and their different hydrodynamic components, the piecewise induction method is used to conduct the vector decomposition and then the hydrodynamic components in body coordinate system are obtained. Equations (6) and (7) are the hydrodynamic components representation produced by up and down flapping of the two paddles in body coordinate, respectively


in which,


Define

The synergy swimming gait with 2 DOFs satisfy

Define

From equation (10), for the synergy swimming gait, the body is only acted by vertical force and longitudinal force, and the lateral force is 0. The magnitude and direction of vertical force change periodically with the flapping of paddles, which leads to the vertical motion fluctuation of the robot. Based on the above analysis, the normalized expression of space instantaneous hydrodynamic moments of synergy swimming gait can be presented as

Using the same method, the normalized expression of space instantaneous hydrodynamic forces and moments of alternate swimming gait can be presented as equations (12) and (13)
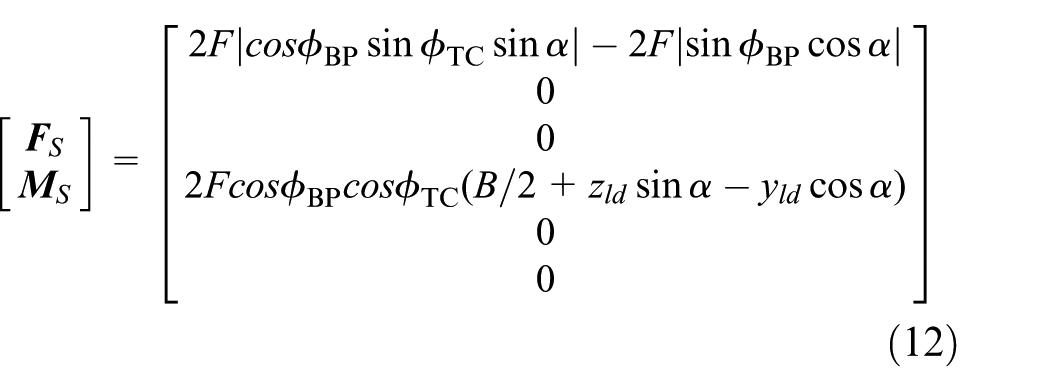
From equation (12), the robot is only acted by longitudinal force, while lateral force and vertical force are zero in alternate swimming gait. So, there will be no vertical and lateral speed fluctuations. The instantaneous pitching and turning moments are all 0, but rolling moment is not 0. Its value is relative to the paddle’s surface pressure F and the direction changes continuously. So, the robot will not yaw or pitch, but will roll periodically.
Simulation and experimental verification
Simulation analysis
In addition to the operating force, the crablike robot is also affected by water resistance. In order to verify the real performance of proposed direct swimming gait, it is necessary to consider the influence of appendages on the propulsion performance and whether the hydrodynamic generated by the paddles can overcome the water resistance.
Next, the feasibility of proposed gaits is studied under the appendages interference. The pressure distributions of robot for the two gaits in one flapping period are shown in Figure 8. When t ∈[T/8, 3T/8] and t ∈[5T/8, 7T/8], the pressure acted on the body increases gradually from the minimum value along +x axis. When t ∈ [3T/8, 5T/8] and t ∈[7T/8, T+T/8], the pressure decreases gradually from the maximum value along +x axis. There are two positive pressure peaks in one flapping period. And, the varying frequency of fluid resistance is twice as flapping frequency.
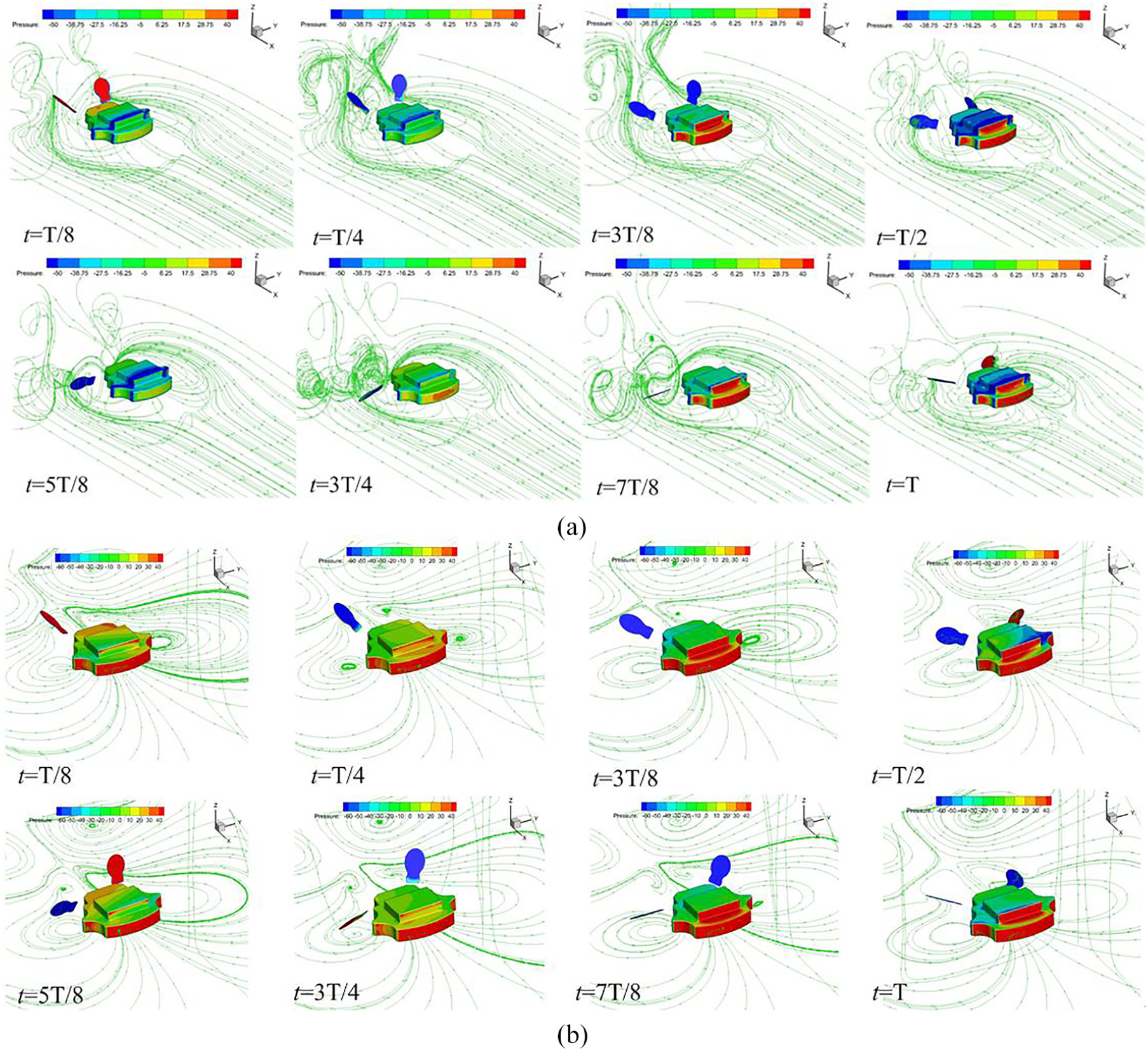
Pressure distribution of body in one cycle: (a) synergy swimming gait and (b) alternate swimming gait.
The curves of hydrodynamic produced by the paddles and water resistance of the body with time for the robot self-propelled swimming are shown in Figure 9. For the synergy swimming gait in the initial stage, the average thrust produced by paddles is larger than the average resistance of the body, so the robot begins to accelerate. With the increase in robot’s speed, the water resistance of the body increases gradually and the thrust produced by paddles decreases gradually. The resultant of forces gradually tends to 0. At this time, the robot reaches a steady speed. Therefore, the direct swimming can be realized for synergy gait. Similarly, the alternate swimming gait can be verified.

Hydrodynamic performance of synergy sculling gait.
Experimental verification
In order to test the robot’s swimming capability more intuitively and deeply and to verify the correctness of theoretical analysis and numerical simulation, an indoor water basin is built with dimensions of 3 m long, 2 m wide and 1 m deep. The relatively static water without waves can satisfy the measurement of direct and turning swimming of the robot. And, the glass material and transparent wall of water basin is helpful to observe the position and posture of the robot. The MTi100 tri-axial accelerometer is used to measure the acceleration of the robot, and the swimming speed can be calculated by the time domain integral. Due to the interference of DC component and high-frequency noise, direct integration of acceleration signal will produce trend term. So, the filtering and DC component elimination are applied before integration.
The test of synergy swimming gait and alternate swimming gait are carried out as shown in Figures 10 and 11. From Figure 10(a), the two paddles flap symmetrically about the robot’s sagittal plane, thus the thrust is produced. Because of the symmetry of the flapping paddle, the robot neither generates yawing motion nor rolling motion, but swims forward in wave around the y-axis with repeatedly pitching movement. The projection of the motion trajectory of the body center of gravity in the sagittal plane is approximately a wave line extending forward. The instantaneous attitude angles are shown in Figure 11(a). At the beginning, the pitch angle, roll angle, and yaw angle all have a larger fluctuation range and then tend to stabilize, and finally, oscillate periodically around a fixed value. The fluctuation range of pitch angle is ±8.1°, while the range of roll angle and yaw angle is smaller, can be approximately negligible. The analysis results are consistent with those of section “Governing equation.”

Motion capture of gait for crablike robot based on lift-based mode: (a) video grab of synergy swimming gait and (b) video grab of alternate swimming gait.

The instantaneous attitude angle of robot swimming in lift-based mode: (a) synergy swimming gait and (b) alternate swimming gait.
According to Figure 10(b), the alternate swimming gait can also realize direct swimming, but its attitude is totally different from the synergy gait. In this mode, the two paddles flap up or down alternately relative to sagittal plane with a phase difference of π. The robot neither generates yawing motion nor pitching motion, but swims forward in waves around the x-axis with repeatedly rolling movement. The projection of the motion trajectory of the body center of gravity in the sagittal plane is approximately a straight line. The instantaneous attitude angles are shown in Figure 11(b). When swimming steadily, the fluctuation range of pitch angle and yaw angle is small and can be neglected. The range of roll angle is ±8.8°, and its oscillation frequency is the same as that of the paddle flapping. It can be seen that both the yawing and pitching moments are zero, and the rolling moment fluctuates periodically with the change of the paddle’s motion parameters.
From Figure 12, the direct swimming motion under different flapping frequencies is similar, which all of them include acceleration stage and stable stage. For synergy swimming gait, the acceleration time of three different frequencies is 11.5, 4.5, and 4.3 s, respectively. In stable stage, the average speed is 0.0883, 0.1841, and 0.1953 m/s, respectively. For alternate swimming gait, the acceleration time is 7.7, 3.5, and 3.8 s. And, the average speed in stable stage is 0.0109, 0.2106, and 0.2057 m/s, respectively. Both the speed and acceleration have fluctuations in the two gaits. And, the latter mainly reflects the pulsation characteristic of propulsion produced by paddles.
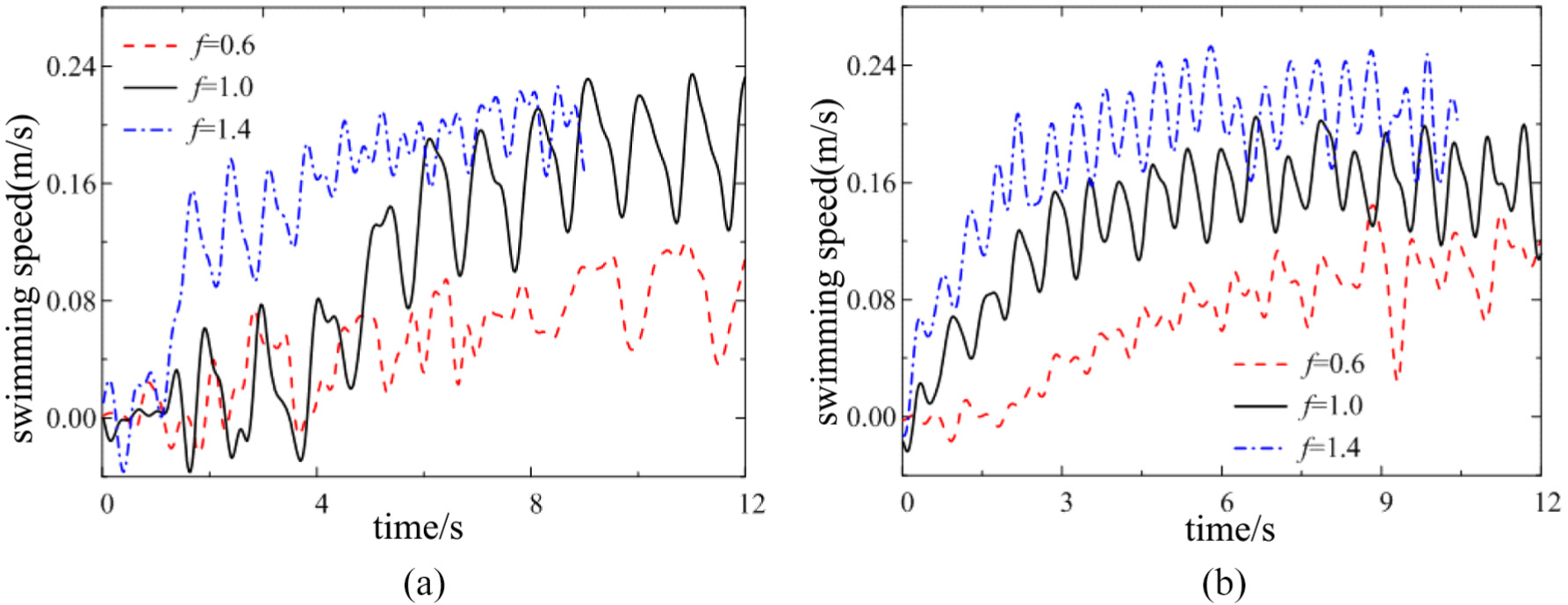
The instantaneous swimming speed of robot for different frequencies: (a) synergy swimming gait and (b) alternate swimming gait.
From Figure 13, the frequency of acceleration of robot is twice as the flapping frequency of paddle. The fluctuating amplitude of acceleration increases with the flapping frequency. Comparing Figure 13(a) and (b), the fluctuating amplitude of acceleration of synergy gait is larger than that of alternate gait. The main reason is that besides the longitudinal thrust, the robot is also acted by the pitching moment, which increases with the flapping frequency, but the direction changes periodically with time. As a result, a larger fluctuation occurs in the longitudinal acceleration component of the body mass centroid.
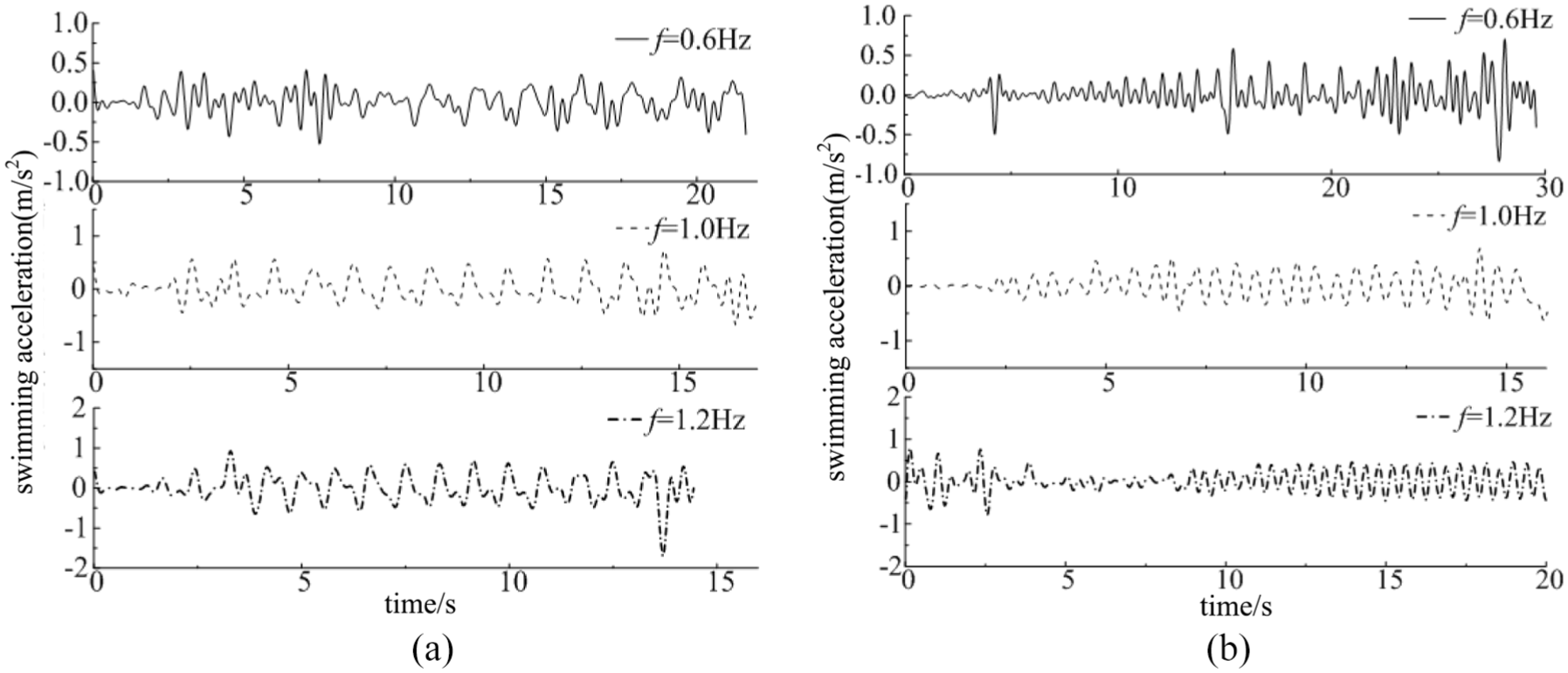
The instantaneous swimming acceleration of robot for different frequencies: (a) synergy swimming gait and (b) alternate swimming gait.
In order to analyze the influence of flapping frequency on the propulsion performance in detail, the flapping frequency is refined further and an experiment are conducted every 0.1 Hz. The average speed curves are shown in Figure 14. At first, the average speed increases with flapping frequency in both swimming gaits. That is, the higher the flapping frequency is, the greater the average thrust is. But the speed starts to decrease when the flapping frequency reaches a certain value. One of the reasons is that when the flapping frequency exceeds the ultimate rotation frequency of the steering engine, the joints cannot reach the expected position, which affects the propulsion. Another reason is that the waves can be generated due to the high-frequency flapping of paddles, which hinders the body. The robot reaches the maximum speed 0.21 m/s when f = 1.1 Hz in synergy swimming gait and 0.23 m/s when f = 1.2 Hz in alternate gait.

The average swimming speed of robot for different frequencies.
Comparing the speed curves of the two gaits, the average speed of alternate gait is higher than that of synergy gait at the same flapping frequency except for f = 1.2 Hz. The reason is that the additional pitching moment is produced due to the interaction between swimming paddle and water in synergy gait, which results in a pitching movement. For the crablike robot like a flat structure, the repetitive bowing and lifting motion increase the swimming resistance undoubtedly, but also increases the wall reflection effect. The optimum propulsion efficiency of alternate gait is 0.026 m/Ws when f = 0.8 Hz and of synergy gait is 0.021 m/Ws when f = 1.2 Hz. For the synergy gait, the swimming speed and efficiency reach the optimum value at the same frequency.
Compared with the simulation and experimental results of four gaits, a higher thrust peak can be produced in drag-based mode, which can enhance the mobility of the robot. But the efficiency of this gait is much lower than that of the lift-based model. Among four gaits, the efficiency of the alternate swimming gait in lift-based model is the highest. In summary, the gait in drag-based mode is suitable for low-speed swimming or for high mobility requirements of the robot, such as a sudden change of the movement or the emergency starting and braking conditions. While the gait in lift-based mode is more suitable for high-speed cruising.
Conclusion
Taking the P. trituberculatus as the bionic prototype and integrating the crawling mechanism and flapping wing mechanism, the leg–paddle hybrid driven crablike robot is proposed with the functions of walking on land, crawling on seabed, and swimming underwater in this article. Based on the research of underwater propulsion mechanism of single paddle and hydrodynamic performance of cooperatively propulsion of double paddles, the swimming gait sequence and parameters are planned. And, the validity of proposed gait is verified by numerical simulation of self-propelled swimming and direct swimming experiments, and the conclusions are as follows:
In the synergy swimming gait based on lift mode, the robot swims forward a wave with rolling movement. The water resistance is the smallest, and the swimming speed and efficiency are the best.
The influence of the flapping frequency and relative phase of the two gaits on swimming speed are all raised first and then suppressed. The maximum speed of synergy swimming gait is 0.21 m/s when f = 1.1 Hz and is 0.23 m/s when f = 1.2 Hz in alternate gait. In the high-speed flow environment, the robot can properly increase the paddle’s flapping frequency to resist the incoming flow drag.
In synergy swimming gait and alternate swimming gait, both the speed and acceleration have fluctuations, in which the acceleration fluctuation mainly reflects the pulsation characteristic of propulsion produced by paddles.
At the same flapping frequency, the average speed of alternate gait is higher than that of synergy gait.
Footnotes
Handling editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant nos 51409058 and 60875067) and the State Key Laboratory of Robotics of China (nos 2018-Z008 and Y9C1205201).