
Abstract
A new actuator failure compensation scheme in the presence of actuator failures with multi-uncertainties is proposed for half-car active suspension systems based on multi-design integration. A parameterized function has been introduced to denote the multiple failures occurred in the front and rear actuators. An effective feedback controller is designed to obtain asymptotic tracking and closed-loop system stability by employing backstepping technique. Based on the desired controller, multiple adaptive control signals are designed corresponding to each possible failure case. By introducing failure indicator functions and integrating these control signals, a composite controller is constructed to handle all failure patterns, which ensures both pitch and vertical motions of car body to stabilize and track the desired signals. Finally, simulation is conducted to verify the effectiveness of the controller proposed in this study.
Keywords
Introduction
Recently, more and more researchers attach great importance to the study of improving the dynamic characteristics of vehicle ride comfort and handling performance.1–3 Achieving acceptable performance in these measures is critical to enable automotive manufacturers to meet the requirements for ensuring passengers health and safety and so on. Vehicle suspension plays a fundamental role in improving passenger comfort and handling characteristics, which is generally divided into three types: active, semi-active, and passive suspensions. In active suspension systems, actuators are used to supply additional forces, so that energy can be added and dissipated from the system. The active suspension systems have advantages on good performance under different riding conditions, compared with passive and semi-active systems. Consequently, such systems have attracted extensive attention in recent years, and many diverse actuator control strategies were reported during the past few decades, such as adaptive control,4,5 fuzzy control,6,7 robust control,8,9 optimal control,10–12 and preview method. 13 Of all the strategies, the adaptive control method has certain advantages of guaranteeing steady-state and transient performance. Especially, with this algorithm, the unknown uncertainty can be handled with an improved capability.
However, previous experience showed that, in the event of components (such as sensors and actuators) faults, conventional feedback control designs for complex systems cannot offer satisfactory performance, and even cause instability,
14
which is totally unacceptable in complex systems. In practical applications, compared with other components faults in active suspensions, the impact of actuator failure is more severe and might lead to instability or even unexpected catastrophic accidents. For this reason, new approaches have emerged to tolerate component malfunctions, while achieving desirable performance and stability whenever the system is under faulty or fault-free conditions. Zheng et al.
15
studied infinite frequency H-infinity control for active vehicle suspension systems subjected to loss of actuator effectiveness, and further proposed controllers which can guarantee relation dynamic tire load and vehicle suspension deflections in their allowed scopes. Motivated by the fact that loss of actuator effectiveness is a common failure case in vehicle suspension systems, Moradi and Fekih16,17 proposed two novel approaches for a full-scale vehicle dynamic model with an active suspension system to guarantee closed-loop system stability for both normal and faulted cases. Yang et al.
18
proposed a robust fault-tolerant control scheme based on
One limitation of these actuator failure compensation methods is the assumption that the failure conditions of all the system components are known (such as loss of actuator effectiveness, lock-in-place or Markovian jumping actuator failure). However, with the growing complexity of passenger vehicles, a variety of fault conditions are likely to be encountered, and the failure types are essentially random and unpredictable. Moreover, most of the aforementioned studies assume that the faulty state will remain during the rest of operation even if an actuator fails. However, this is unpractical, as failures usually develop in a gradual manner as time passes. In addition, the actuators in active suspension systems are likely to suffer an intermittent failure resulted from electromagnetic interference. For this reason, the failed actuators may recover from the failure case as the interference disappear and may fail again later. In a word, the actuator failure is uncertain in essence.
Besides, in practice, it is impossible to anticipate the times, patterns, types, and values of actuator failures in advance, as they are essentially uncertain in nature. That is, an actuator may switch its status among various failure patterns (e.g. failure-free case, partial or total loss of effectiveness case, lock-in-place case, time-varying failure case) randomly. In this condition, actuator failure compensation controllers which consider failure type, failure value, failure time, and failure pattern are required for active suspension systems. In addition to stability, direct adaptive control approach provides theoretically provable asymptotic tracking for systems with parameter variation and uncertainties, which is a key advantage compared with other approaches. 26 Backstepping control method can link the choice of Lyapunov functions with its controls, which is usually used to design a feedback control law, which can ensure the stability of the related system. 27 Therefore, adaptive control and backstepping are preferred in this study.
This article presents a novel direct adaptive controlling method for addressing the tracking control problem for active suspension systems having uncertain actuator failures. In this proposed algorithm, multiple controllers designed for individual failure cases are incorporated, as well as an integration mechanism. This article has the following contributions:
A parameterized mathematical function is introduced to denote multiple types of actuator failure occured in active suspension control system, especially time-varying failure case which is seldom considered in other studies of half-car active suspension control system.
This article developed a novel fault-tolerant controlling approach for active suspension systems to handle actuator failures with multi-uncertainties, which has a composite structure, it means that a single adaptive controller is utilized to accommodate multiple uncertainties of actuator failures.
In this approach, explicit fault detection is not needed, as multiple types of failures are estimated by using a complete controller parametrization, compared with fault diagnosis designs proposed in Yetendje et al. 28 and Rizvi et al. 29 Compared with the fault-tolerant control design presented in Moradi and Fekih 17 and Sun et al. 25 to handle two specific failure scenarios, respectively, our adaptive control scheme does not rely on the knowledge of failure type and therefore can be used to handle multiple types of actuator failures, in addition to lock-in-place and loss of effectiveness.
The rest of this article has the following sections: The dynamic models of a half-car active suspension system and the control problems are described in the “Problem statement” section. The design procedures for the adaptive fault-tolerant controller are expended in the “Controller design” section. Simulation study of the adaptive actuator failure compensation scheme is performed in the “Illustrative example” section to demonstrate its effectiveness. Finally, the “Conclusion” section presents the conclusion.
Problem statement
System description
A nonlinear half-car active suspension system shown in Figure 1 is considered in this article, which has four-degree-of-freedom (DoF).

where

Schematic diagram for a half-car active suspension system.
Nomenclature.

Define

Actuator failure model
The parameterized function introduced to denote the actuator failures is expressed as

where failure index
Remark 1
The failure model (equation (3)) can be available to describe the following failures appeared in the active suspension system as follows:
Stuck fault:
Complete loss of effectiveness failure:
sinusoidal oscillatory failure:
For the oscillatory failure, one case is that the failure frequency is known; in this case, the oscillatory failure can be modeled by equation (3) with
The failure signal is then expressed with a compact form

where
With equation (4), the input signal

in which
To facilitate the design procedure in this article, the following realistic assumption should be satisfied.
Assumption 1
System (1) is so designed that the normal actuator can still achieve the control objective by using the known failure information for any up to one actuator failure.
Assumption 2
The reference trajectories
Control objective. An adaptive compensation strategy to guarantee half-car suspension system (1) closed-loop stability, and the vertical and pitch motions
Failure patterns. To satisfy the assumption that at most one actuator failure completely failed within the system, that is, both one actuator failure and no failure case (
Controller design
In this section, the adaptive failure compensation scheme is designed for half-car suspension system (1) combining with backstepping technique, to achieve the control objective even with uncertain actuator failure.
Multiple nominal controllers design
To proceed the design procedure, we rewrite system (1) as

where
To develop the basic actuator failure compensation techniques for the suspension system, we need to design a desired signal

for control action implementation.
Desired feedback control signal
Define error variables

Choosing the stabilizing function as

for a chosen constant

Considering the Lyapunov function

It can be found from equation (12) that the second term
Using the second equation of equation (6)

with

Considering the error measure

We set the control signal

would lead to

It can be concluded that the control signal equation (16) can realize the desired control objective.
When the active suspension system operates under three failure cases
Design for

for
Design for
In such case, the signal

By solving this control equation, we have

for

Design for
In this case,

Similarly, we obtain the solution

for

Integrated nominal controller design
We first introduce the failure indicator functions

In addition, the above individual designs are combined here for the individual situations to construct the composite controller structure, so as to accommodate all the three failure cases

where
Adaptive controller design
In case of unknown actuator failures, the nominal controller
where
Based on
Error equations
Now, we rewrite equation (14) as

When
When

When

where
Adaptive laws
The adaptive laws for






where adaptation gains
System performance analysis
In practice, we cannot know which of the three cases the system is in, but the stability of the system to be used in the three possible failure patterns can be guaranteed by the designed control law
1. When

2. When

3. When

Then, with equations (11) and (32)–(37), the time derivative of
The original system is an eighth-order system; the above adaptive design focus on the first four states; next, we analyze the stability of zero dynamics consisting of the last four states. We set

Substituting equation (41) into dynamic equations of

where

Defining a positive function


where

where

which shows us that

From the previous analysis, we know all the signals of the zero dynamics are bounded. In short, the following theorem is obtained.
Theorem 1
Considering that active suspension system (1) with unknown actuator failure (4) satisfies Assumption 1 and Assumption 2, the proposed scheme synthesizes multiple controllers by using integration mechanism to form a composite control law (27) updated by laws (32)–(37). This scheme can effectively handle multiple uncertain failure cases, and guarantee closed-loop systems stability as well as the asymptotic output tracking performance.
Illustrative example
The effectiveness of our proposed adaptive actuator failure compensation approach is illustrated with an example in this section. In this paper, the classic bump road input is used to verify the proposed controller, whose ground displacement is expressed as

where
The road condition
Remark 2
The external disturbance

where
We write the disturbance model (equation (45)) in a compact form

where
The unknown disturbances caused by poor road condition can be regarded as an unknown additional term in the system input signal; if the unknown time-varying disturbances can be parameterizable and modeled by function (46), the adaptive failure compensation scheme proposed in this article can be extended to compensate the unknown disturbances completely so as to ensure the closed-loop system stable and asymptotic output tracking. If the unknown bounded disturbances are unparameterizable, it cannot be compensated completely, which influences the precision of the adaptive parameter estimation and vehicle transient performance; however, the control scheme design for the parameterizable disturbances can also be extended to improve the vehicle transient performance to the most extent by properly adjusting the initial value and tuning parameters. For the adaptive control design, in our article, the applied parameter projection design can guarantee that the parameter estimation errors are bounded, so the closed-loop system signals are bounded and the asymptotic output tracking can be ensured.
Desired attitude command: In this article, the desired reference trajectory parameter
Failure scenario 1: (1) both actuators function healthily over the time interval
Failure scenario 2: (1) both actuators function healthily over the time interval
Simulation conditions
The initial value are
Simulation results
The adaptive backstepping control method was compared with our proposed adaptive actuator failure compensation method, with the simulation results shown as follows. Figure 2(a) and (b) presents the vertical displacement and acceleration of the active suspension system, respectively; Figure 3(a) and (b) presents the pitch angle displacement and acceleration of the active suspension system, respectively. Comparing with the adaptive backstepping control method designed for solving stuck failure case, our proposed fault tolerant control (FTC) scheme significantly improves suspension performances. It is shown that the vertical and pitch angle displacements as well as their acceleration signal almost approach zero successfully after the simulation starts. A transient response occurs in the output when
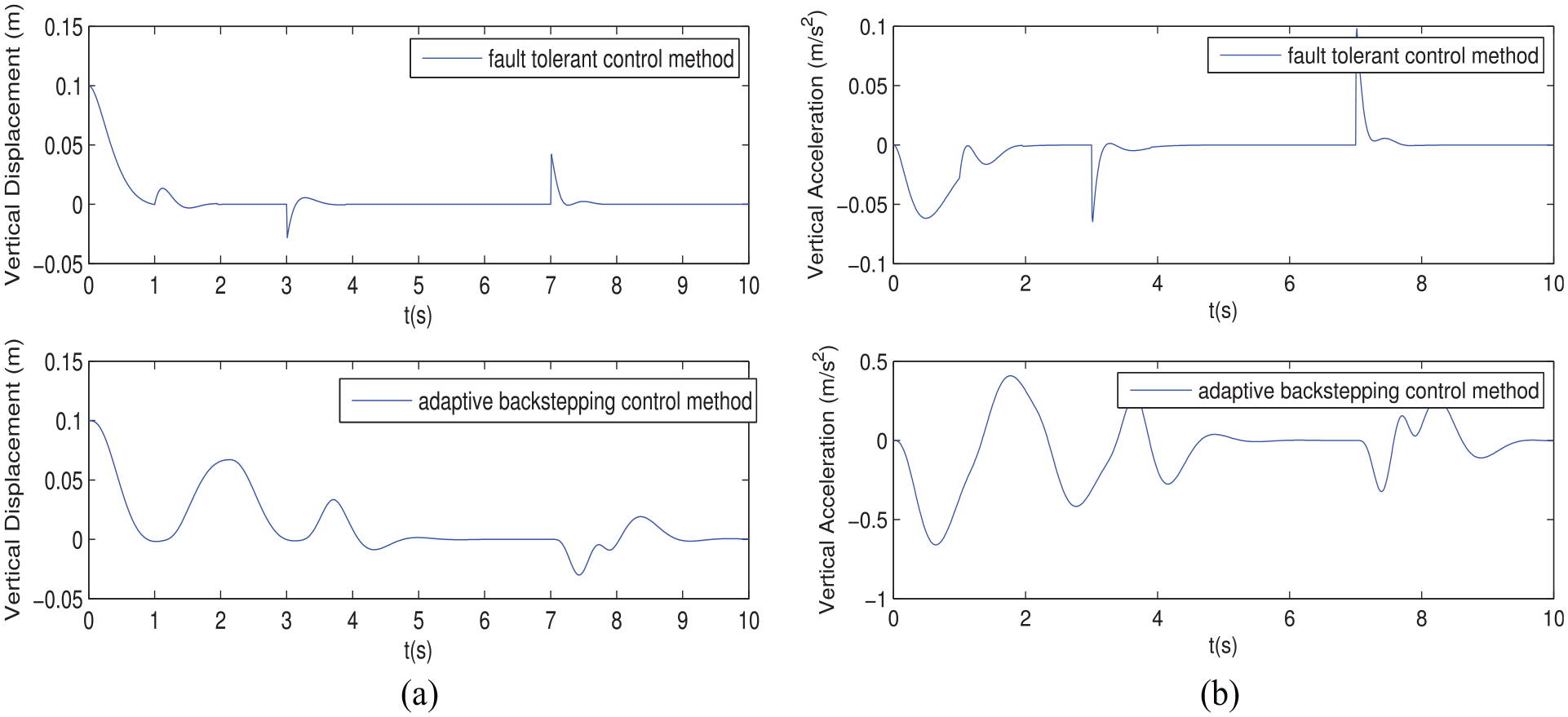
(a) Vertical displacement and (b) vertical acceleration for failure scenario 1.

(a) Pitch angle displacement and (b) pitch angle acceleration for failure scenario 1.

Control input signals for failure scenario 1: (a) control input signals with FTC method and (b) control input signals for adaptive backstepping control method.

(a) Vertical displacement and (b) vertical acceleration for failure scenario 2.

(a) Pitch angle displacement and (b) pitch angle acceleration for failure scenario 2.

Control input signals for failure scenario 2: (a) control input signals with FTC method and (b) control input signals for adaptive backstepping control method.
Summarizing all the cases (normal case, lock-in-place failure case, and time-varying failure case), it is seen that uncertain actuator failures can be compensated by using the adaptive control law, while maintaining the tracking capability of vehicle active suspension systems.
Conclusion
This article proposes an adaptive actuator failure compensation method which can be used for attitude tracking control of vehicle active suspension systems. The feature of actuator failure studied here is that the knowledge of failure values, failure patterns, and failure time instants is unknown in advance. After all possible failures are completely parametrized and an integration mechanism is introduced, we combine multiple controllers to construct a composite failure compensator, by which the uncertain actuator failures can be solved. The proposed scheme can ensure the desired tracking property and stability of the half-car active suspension system. The desired adaptive actuator failure compensation performance was verified by simulation.
Footnotes
Handling Editor: Yanjun Huang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Changzhou Science and Technology Support Program (Social Development) of China under grant CE20195027, Jiangsu University Natural Science Foundation of China under grants 18KJB580006 and BK20170318, and National Natural Science Foundation of China under grant 61903165.