
Abstract
This work solves the stability problem of a vehicle suspension with stochastic disturbance by designing an adaptive controller. The model of a quarter vehicle subjected to noise excitation is considered. The stochastic perturbance is realized by the roughness of the road and the vehicle moving with constant velocity. In the control design procedure, fuzzy logic systems are used to approximate unknown nonlinear functions. Meanwhile, the mean value theorem is employed to ensure the existence of the affine virtual control variables and control input. The backstepping technique is applied to construct the ideal controller. On the basis of Lyapunov stability theory, the proposed control method proves that the displacement and speed of the vehicle is reduced to a level ascertained by a true “desired” conceptual suspension reference model. Finally, the effectiveness of the proposed method is verified by simulation of electromagnetic actuator servo system.
Introduction
In the past decade, the control design of vehicle suspension has received tremendous numbers of attention based on ride comfort and driving safety. The vehicle suspension system includes a connection and a damping device between the body and the wheels. Its main task is to attenuate and isolate various vibrations caused by rough roads, guaranteeing the stability of the vehicles and providing a more safety ride. Because the suspension system is closely related to the ride comfort and driving safety of the vehicle, the control for suspension systems is necessary. According to different control forms of the suspension system, it is divided into passive suspension, semi-active suspension and active suspension. Compared with semi-active suspension and passive suspension,1,2 active suspension system has great design potential in terms of output capability range, driving comfort and safety performance, so the control design of the vehicle active suspension is very hot.
In order to meet the increasing requirements on the safety of vehicle and ride comfort, many excellent control methods have been used to design the vehicle suspension systems. These control methods improve the control accuracy and vehicle maneuverability. Several
But the active suspension systems with stochastic excitation were not considered in the above study. Stochastic disturbance is a common phenomenon in practical systems. Therefore, the study on stochastic control problem has great potential development prospects and has attracted widespread focus. Patrick21,22 first realized the global stability of stochastic nonlinear systems and developed the concepts of Sontag stability theory and Lyapunov function to the stochastic environment. A backstepping control scheme by using a quadratic Lyapunov function is addressed in the study by Deng and Kristi’c 23 and Deng et al. 24 and widely used to control several kinds of stochastic nonlinear systems, solving the stabilization and inverse optimal control problems of strict feedback systems However, the above stochastic system stability theory requires that the nonlinear system satisfies the local Lipschitz condition. In order to relax the restrictions on the system, adaptive fuzzy control was the devout study by Li and Liu. 25 Afterwards, the fuzzy adaptive method was widely applied to solve control problem of nonlinear strict-feedback systems26–28 and uncertain stochastic nonlinear systems.29–31 Moreover, the globally adaptive state-feedback controller is investigated in the study by Min et al. 32 for a more general class of stochastic nonlinear systems with an unknown time-varying delay and perturbations. Meanwhile, for strongly interconnected nonlinear systems suffering stochastic disturbances, the output feedback decentralized control problem is solved by applying adaptive neural control scheme in the study by Wang et al. 33 A reduced-order observer and a general fault model are investigated in the study by Ma et al. 34 for stochastic nonlinear systems with actuator faults, which are applied to observe the unavailable state variables and describe the actuator faults. But there are few stochastic control methods used in vehicle suspension system.
To the best of our knowledge, there are few results in open literature on adaptive backstepping stochastic control for vehicle active suspension systems. Therefore, this paper turns to handle the fuzzy adaptive control problem for vehicle active suspension systems with stochastic disturbance. Considering the existence of stochastic disturbance problem of the system, a fuzzy adaptive controller has been proposed by applying backstepping strategy. The proposed fuzzy adaptive stochastic controller ensue that the displacement of the vehicle is small enough and tends to be stable. The major innovations of this work are listed as follows:
If the stochastic disturbance caused by the road surface cannot be handled, the performance of vehicle suspension will be greatly affected. In order to improve the applicable range of suspension system. This paper studies the adaptive fuzzy stochastic control problem for quarter vehicle active suspension systems with stochastic disturbance. By solving the stochastic disturbance of road surface, improve the driving comfort and safety performance.
Based on backstepping method, an adaptive fuzzy control strategy has been investigated for quarter vehicle active suspension system. The existence of the affine virtual control variables and control input is guaranteed by mean value theorem, and a novel adaptive compensation strategy is adopted to overcome the design difficulty for suspension system.
A good actuator can greatly improve the performance of the suspension. Compared with previous studies,11–18 this paper solves the problems in the electromagnetic suspension system, which exhibits a high efficiency and excellent servo characteristics.
Preliminaries and problem formulation
System descriptions
In this paper, the quarter-vehicle electromagnetic active suspension model is shown by Figure 1, in which M is the sprung mass that represents the vehicle chassis; m is the unsprung mass that represents the wheel assembly;
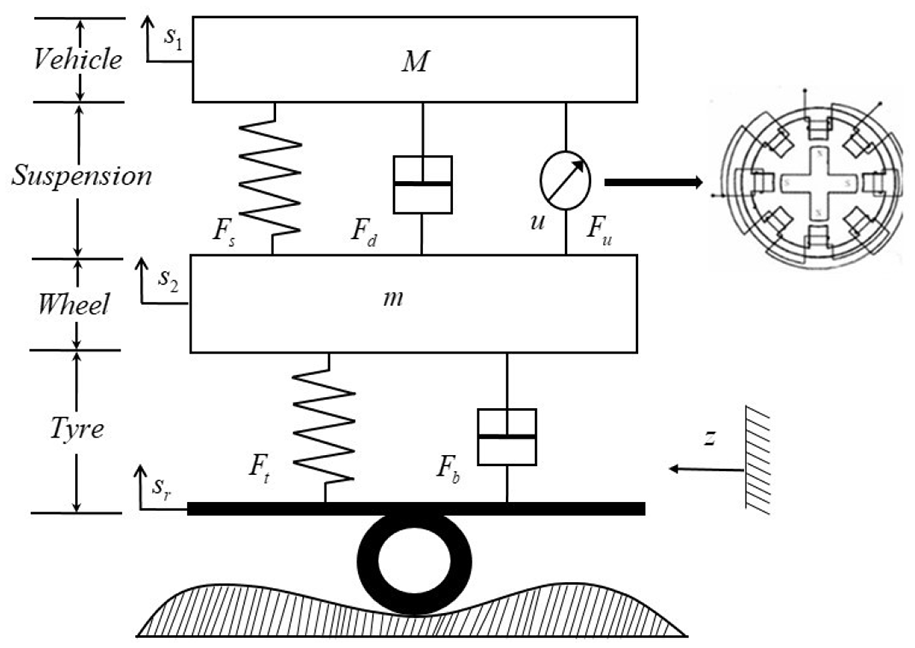
Quarter-vehicle model.
A great active suspension control system is inseparable from an actuator with excellent performance. The electromagnetic actuator considered in this paper has fast response and large braking force. The electromagnetic actuator circuit diagram is shown in Figure 2.
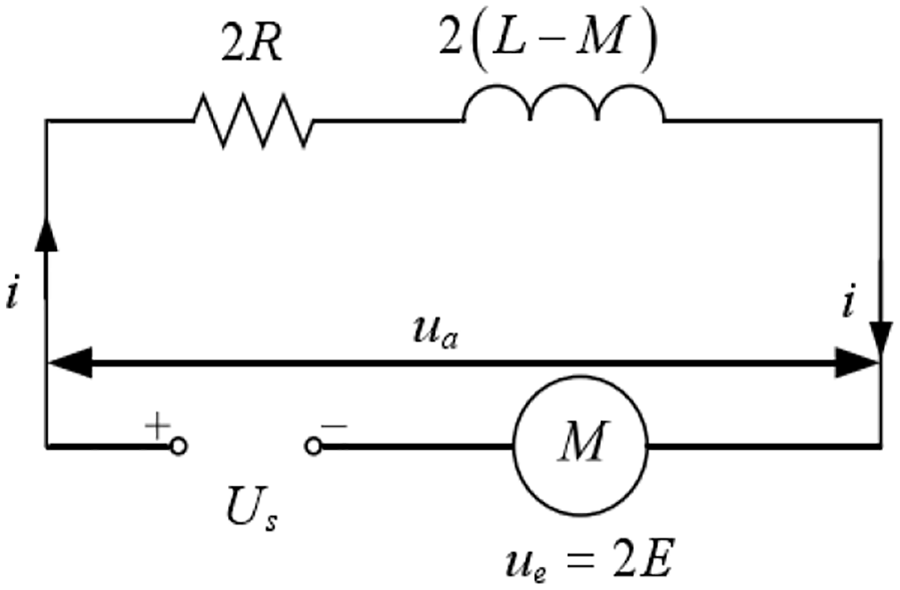
Electromagnetic actuator circuit diagram.
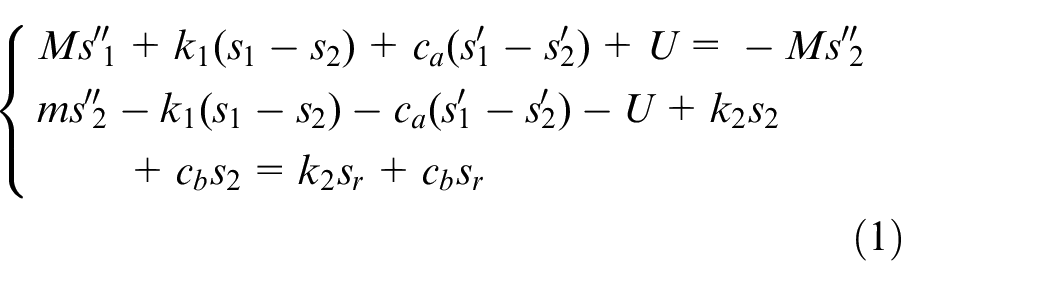
The force
The dynamic equation of vehicle suspension is described by
Due to the unpredictability of the roughness of the road, we can obviously view it as a stochastic process. Following the studies by von Wagner 35 and Litak et al., 36 the roughness of the road is taken to be a spatial function obtained by passing a white noise

where white noise

where
Using the abbreviations

the dynamic equation (1) is further rewritten as
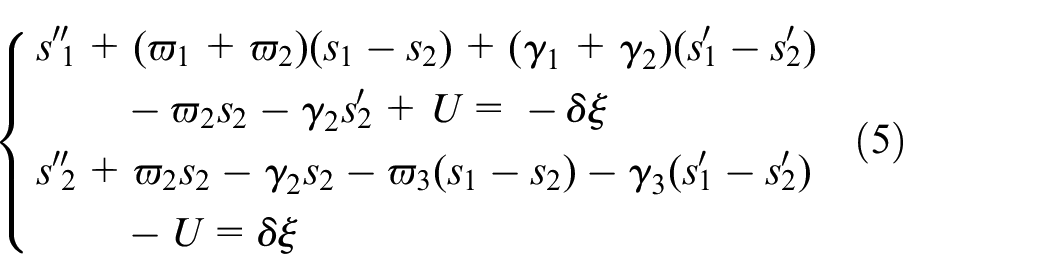
with the transformations
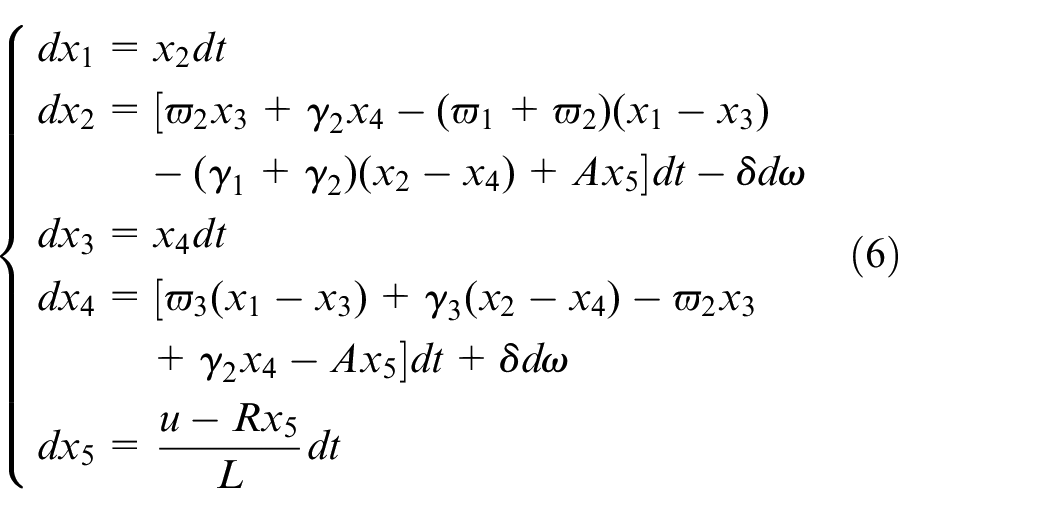
where
For the system electromagnetic vehicle suspension system given by equation (6), define
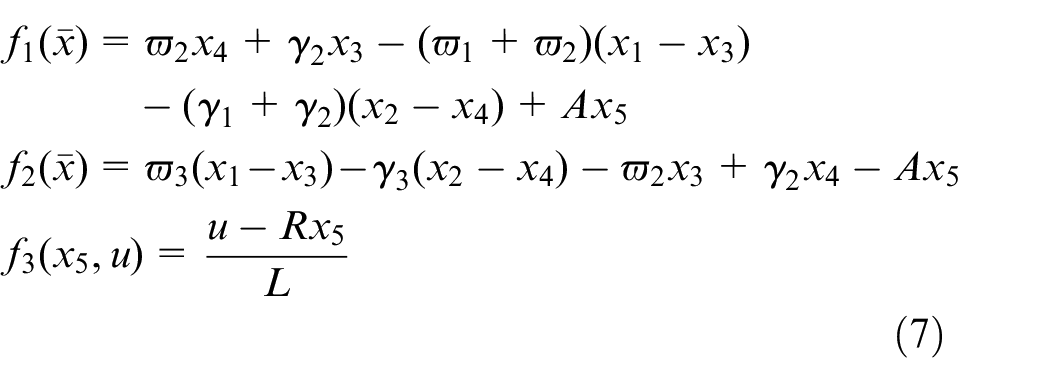
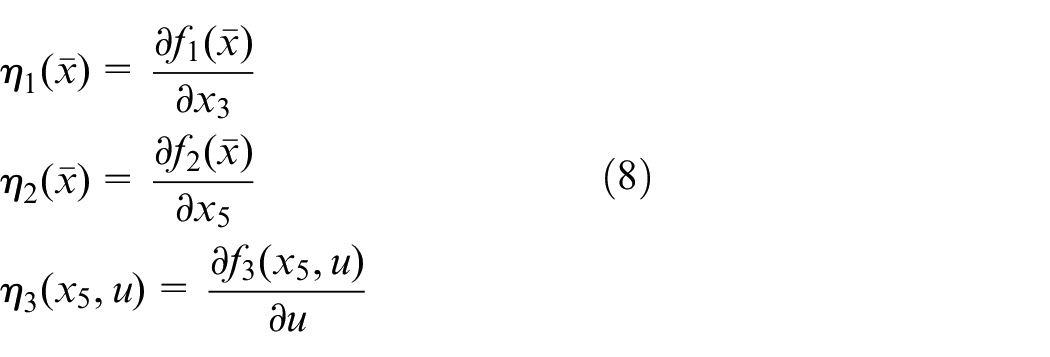
In order to get explicit virtual ones, one can express
in which smooth function
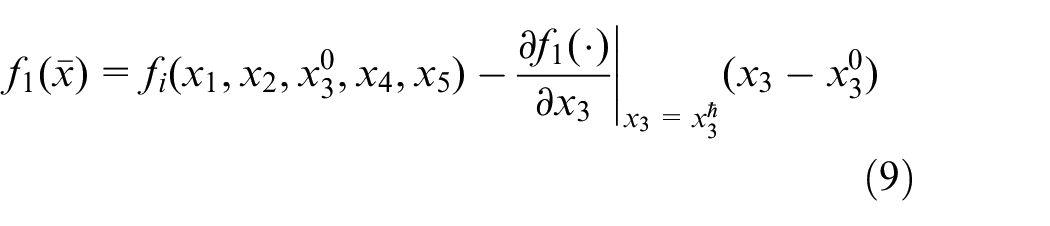
Further, by choosing
where
Similar to equation (10), one has

where
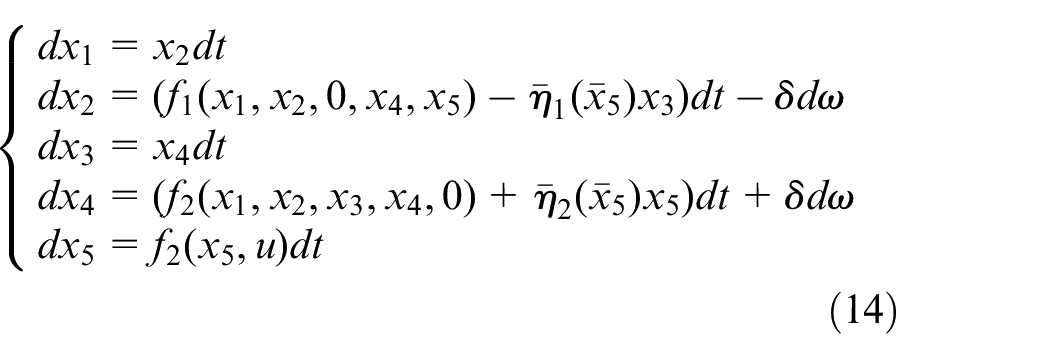
The vehicle suspension system given by equation (6) can be rewritten as
Control objective
For electromagnetic active suspension systems with stochastic perturbance, the input u for the electromagnetic actuator is developed to guarantee that the vertical motion and the vertical of vehicle body are stable, respectively.
Preliminary knowledge
Consider a class of stochastic nonlinear systems described by the following differential equations

where
Definition 1
For given

where
Lemma 1
For any

where
Lemma 2
For the stochastic vehicle suspension system given by equation (12), let

then the system has a unique solution almost surely and the system is bounded in probability.
During the vehicle driving, both
Assumption 1
For the signs of
Fuzzy logic systems
Since the active suspension given by equation (12) contains unknown continuous functions, the FLSs are needed to approximate the nonlinearities. The property of FLSs is shown by the following Lemma
Lemma 2
On a compact set

where
Adaptive control design
Based on the change of coordinates, an adaptive fuzzy backstepping controller design strategy will be proposed for the electromagnetic active suspension systems with stochastic perturbance in equation (12). So, define the change of coordinates as follows


where
Step 1: From equation (20) and the first subsystem in equation (5), one gets

We first choose the Lyapunov function candidate

By

From Lemma 1, one arrives at

The virtual controller

Substituting equations (25) and (26) into equation (24) results in

Step 2: Since
where

Consider the Lyapunov function candidate

where
From Lemma 1, it is obtained that

where
According to Lemma 2,

where
By using the property

where
By equation (39), the virtual control law



where
Substituting equations (39)–(41) into equation (38), one gets
According to Lemma 1, one gets


Therefore, equation (41) can be rewritten as

where
Step 3: The time derivative of

Choosing the Lyapunov function

By
Applying Lemma 2 to the last term in equation (47) shows

where

From equation (50) and the definition of
Similar to equation (37), one has



Substituting equations (53)–(55) into equation (52) results in
The virtual controller



where
By completion of squares, one gets


From equations (59) and (60), one gets
where
Step 4: The time derivative of
Choose the Lyapunov function candidate as

By
From Lemma 1, one has
where
According to Lemma 2,

Substituting equation (69) into equation (68) results in
By using the property


Substituting equations (71)–(73) into equation (70) yields
By equation (39), the virtual control law



where
Substituting equations (75)–(77) into equation (74), one gets
According to Lemma 1, one gets


Substituting equations (79) and (80) into equation (78) results in
where
Step 5: The time derivative of

where
From Assumption 1, we know that

where
Note that Assumption 1 on

Choose the Lyapunov function candidate as follows

where
According to Lemma 1, the following inequality can be obtained
FLS

which results in
where
Consequently, from equations (86) and (87) one gets
Design the actual controller u and the parameter adaptive law of


where
According to Wang et al.,
44
since
where

Let

Therefore, equation (93) can be further rewritten as

From equation (94), it can be shown that all the signals are bounded and the tracking error satisfies that
Simulation study
At this point, an active suspension system simulation example is proposed to validate the effectiveness and feasibility of the designed control strategy. The vehicle active suspension system in equation (3) as chosen. The quarter-vehicle model parameters are considered in Table 1.
Quarter-vehicle model parameters.
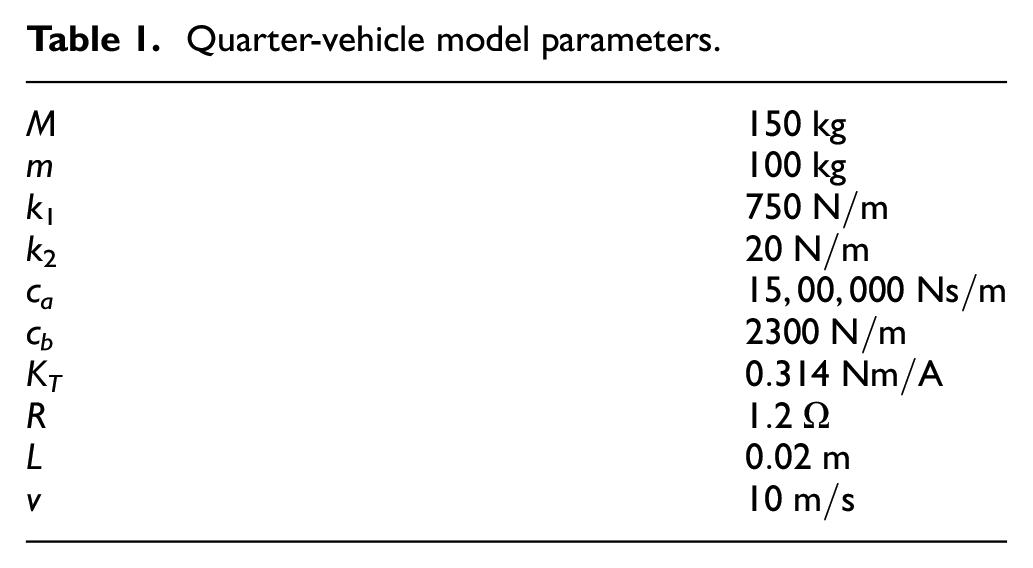
From Table 1, it is obtained that
The fuzzy membership functions are chosen as
Define the design parameters and adaptive laws as:
When there are stochastic perturbances in the electromagnetic active suspension system, the displacements of the sprung masses
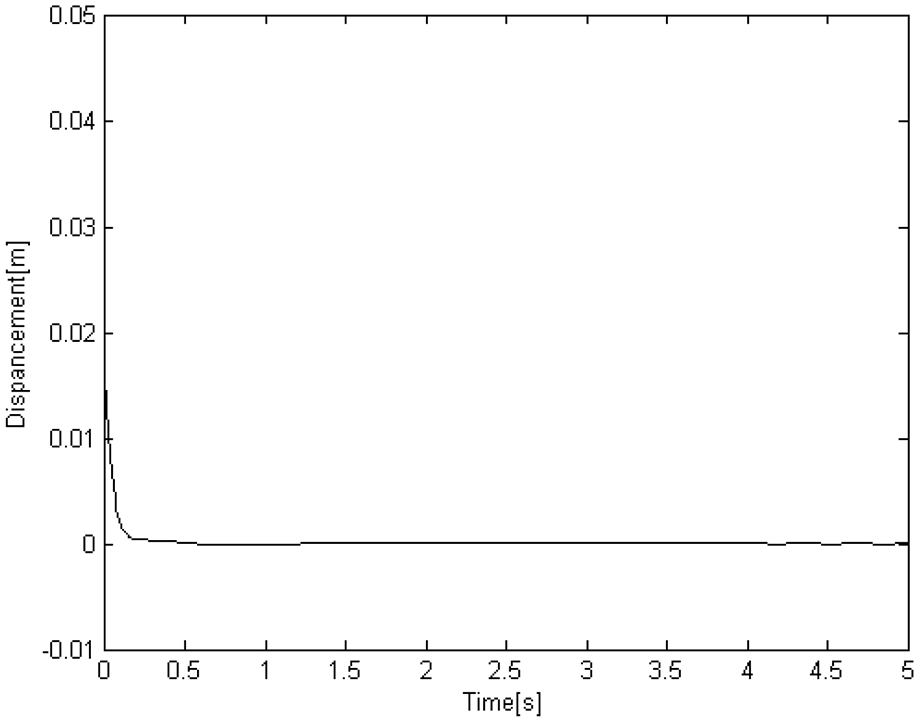
The displacements of the sprung masses.
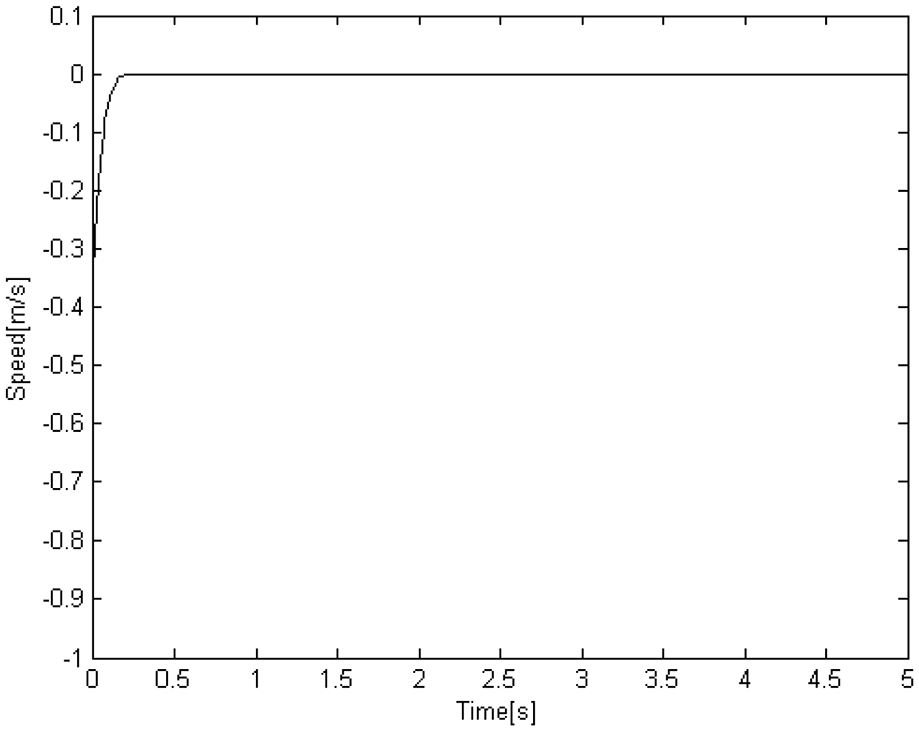
The speed of the sprung masses.
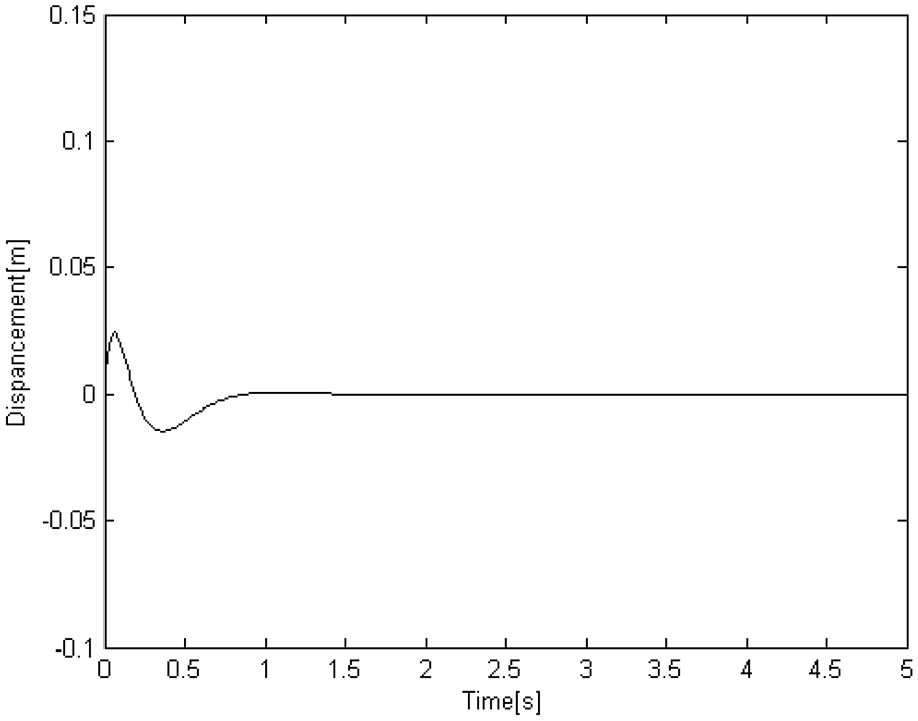
The displacements of the unsprung masses.
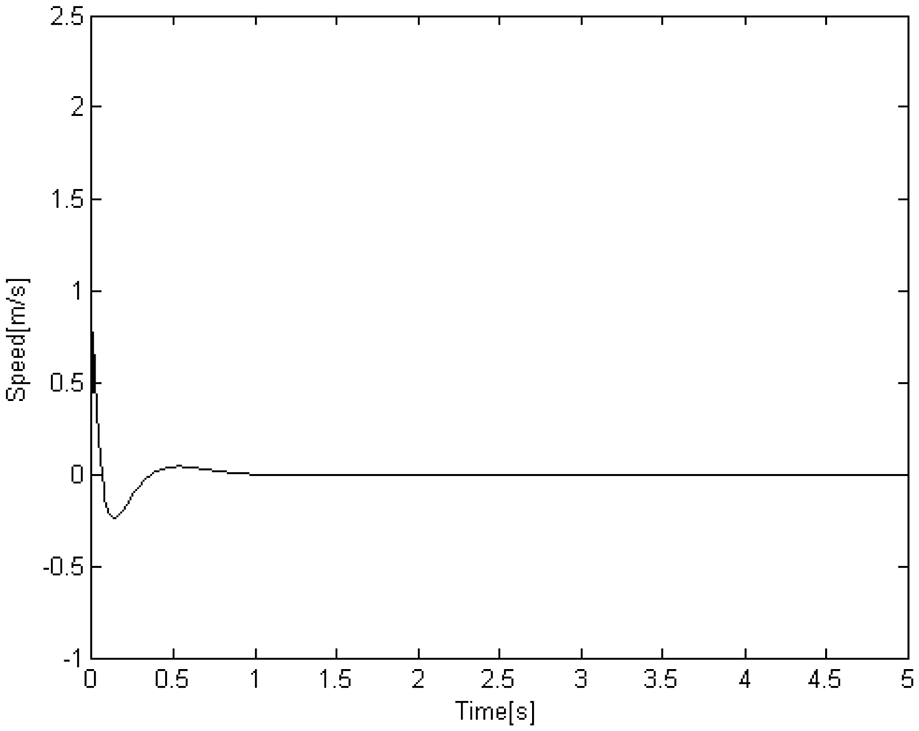
The speed of the unsprung masses.
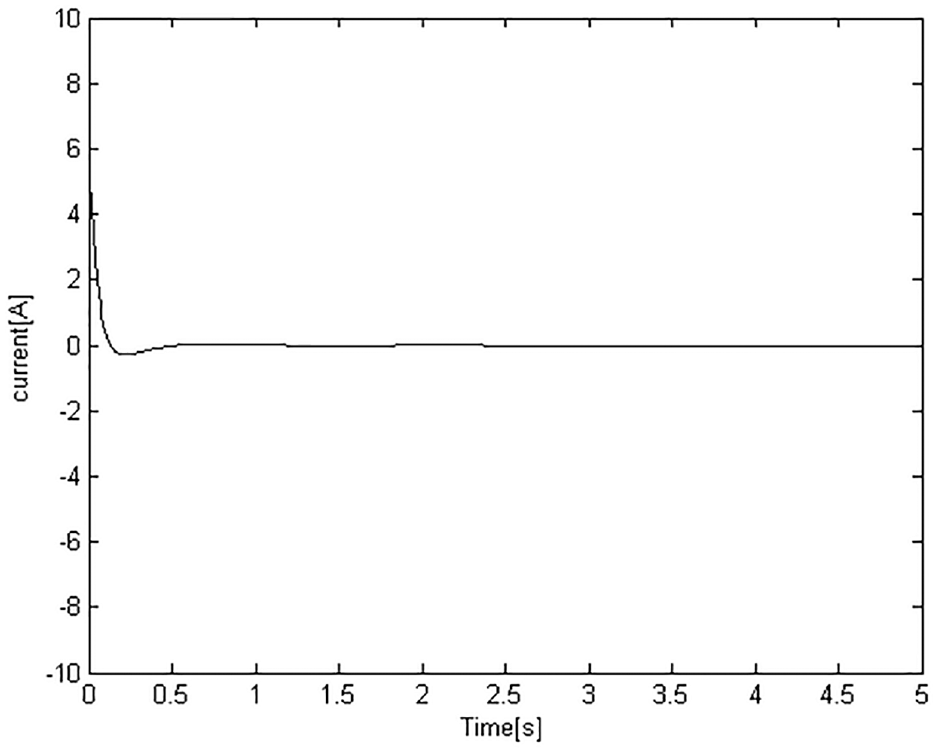
The current of electromagnetic actuator.
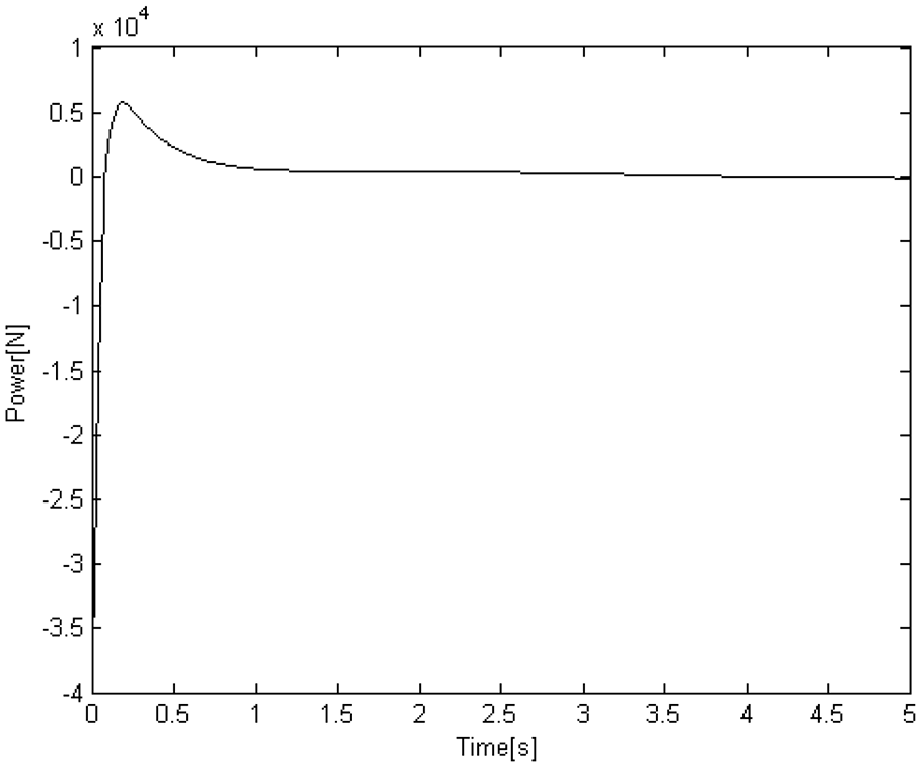
The electromagnetic actuator control force of suspension.
The simulation results are given by Figures 3–8. In Figures 3 and 5, when the electromagnetic actuator works, the displacement of vehicle body vertical and wheel vertical for active suspension systems gradually tends to a stable point. Meanwhile, in Figures 4 and 6, the speed of the vehicle body and the wheel tend to be stable. The current and the control force of electromagnetic actuator also can be stabilized in a small neighborhood of zero in Figures 7 and 8.
Conclusion
This study has addressed the adaptive backstepping control issue for active electromagnetic suspension system on a road surface with random disturbance. By solving the stochastic disturbance of the road surface, the boulevard comfort and driving safety are improved. The adaptive control law of electromagnetic actuator has been developed by adopting the backstepping technique,
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grant 61822307 and Grant 61773188.