
Abstract
A novel adaptive sliding mode guidance law is proposed in this article. The target is assumed to have an arbitrarily but upper bounded maneuvering acceleration which is considered as the system disturbances and uncertainties. The guidance law is consisted of three terms. The first one is a proportional navigation–type term. The second one is a term used for compensating the target maneuvering acceleration. And the last one is a term for controlling the convergence time of the line-of-sight angular rate. In this guidance law, the upper bound of the target acceleration is estimated by an adaptive estimator with a tunable updating law. Hence, the prior knowledge of the upper bound of the target acceleration is not essential for this guidance law. The novel adaptive sliding mode guidance law can guarantee the asymptotical convergence of the line-of-sight rate to zero or its neighborhood, or even the finite time convergence of the line-of-sight rate conditionally. Finally, the new theoretical findings are demonstrated by numerical simulations.
Keywords
Introduction
Proportional navigation (PN) is widely used in the guidance community for its efficiency, robustness, and ease of implementation.1–3 Although PN shows its advantages against nonmaneuvering targets or agile targets with low maneuverability, however, if the maneuverability of the target is close to that of the missile, the performance of PN will be largely degraded.
Robust guidance scheme is an effective methodology to tackle with the maneuvering target problem. A great number of existing robust guidance laws are obtained by using Lyapunov theories on asymptotic or exponential stability, such as H∞ guidance law, 4 L2 gain guidance law, 5 Lyapunov-based nonlinear guidance laws,6,7 and first-order sliding mode guidance laws.8–12 For these guidance laws, only asymptotic or exponential stability is guaranteed, which indicates that the line-of-sight (LOS) rate or the designed sliding surface will converge to zero or its small neighborhood only as time approaches infinity.
The studies on guidance laws with finite time convergence (FTC) have become active and popular in the recent decade. Compared with asymptotic or exponential convergence, it is widely accepted that FTC has a better performance of handling the uncertainties and disturbances of a nonlinear system. Some FTC guidance laws were designed based on high-order (usually, second-order) sliding mode control theories.13–24 Shetessel and colleagues13–16 developed a smooth second-order sliding mode (SSOSM) control–based guidance law with FTC, and then applied it to the design of an integrated guidance and flight control system for endo-atmospheric interceptors. However, the proposed guidance algorithm could only handle sufficiently smooth uncertainties and disturbances, which were not quite possible in real interception scenarios. Based on the backstepping approach, Harl and Balakrishnan17,18 presented a novel second-order sliding mode control approach which guaranteed that the sliding surface and its derivative would go to zero in finite time while ensuring that the sliding surface would not cross zero until the final time, and then they applied this method to the design of a terminal guidance law for an unpowered lifting reentry vehicle during the approach and landing phase and also applied this method to the design of an impact time and angle guidance law for airborne missiles. Based on the similar approach, Zhao et al. 19 designed the terminal guidance law for an unpowered lifting reentry vehicle with impact angle constraints. For the above-mentioned high-order sliding mode control methods, the sliding surface is a linear function of the tracking error and its derivatives, and then the structures of deduced guidance laws become rather complex.
Another way to achieve FTC is the terminal sliding mode control (TSMC),25,26 of which the sliding surface is a nonlinear function of the tracking error and its derivatives. However, TSMC methods usually involve singularity of control input. Therefore, nonsingular terminal sliding mode control (NTSMC) is proposed,27–35 which avoids the singularity problem. NTSMC methods can be mainly divided into two types. The first one is the direct type, which is to construct a new nonsingular terminal sliding surface;27–30 the other one is the indirect type, that is, to design a switching controller.31–35 Kumar et al.20,21 used TSMC and NTSMC to design FTC guidance laws for interceptors against maneuvering targets with all-aspect impact angle constraints, respectively. Sun et al. 22 applied NTSMC to constructing guidance law for airborne missiles with a first-order dynamic lag, which could guarantee the FTC of LOS rate. However, for these guidance laws,20–22 the prior knowledge of the upper bound of the system disturbances and uncertainties was required, and the estimation means of the upper bound were not given.
Some researchers tried to find new ways to achieve the FTC feature with the concept of adaptive control, and hence the prior knowledge of the upper bound of system disturbances and uncertainties does not need to be introduced. Wang and Wang23,24 proposed an adaptive nonsingular terminal sliding mode control (ANTSMC) method which could guarantee FTC of the sliding surface in both reaching and sliding phases and applied it to the integrated guidance and control design of an airborne missile. It was claimed that the prior knowledge of the upper bound of system disturbances and uncertainties (i.e. target acceleration) is not needed for the FTC feature of the control law; however, in the proof the initial requirement on the estimation of the upper bound must be large enough to make the absolute value of the variable structure term larger than the actual upper bound. 36 Therefore, if the upper bound of the system uncertainties and disturbances is not previously known, the settling time of the sliding surface cannot be found and it cannot be strictly said that ANTSMC has the feature of FTC. Later, the authors made a modification of the updating law to guarantee the FTC of the ANTSMC. 37 Wang and Wang 38 also proposed a novel sliding mode guidance law with the saturation function and the same estimator of the upper bound of the system disturbances and uncertainties as used in Wang and Wang. 23 Zhou and Yang 39 presented the smooth adaptive nonsingular terminal sliding mode control (SANTSMC) method for a second-order nonlinear system with uncertainties, which can drive the system trajectory into a small neighborhood of the designed sliding surface in finite time without using the saturation function to replace the sign function, and then applied it to the outer loop design of the partial integrated guidance and control scheme of missile. It was also claimed that the upper bound of system disturbances and uncertainties is not essential for SANTSMC. However, a control parameter of SANTSMC is decided on the upper bound of system disturbances and uncertainties. Therefore, this claim cannot be taken as totally right. In fact, according to the authors’ knowledge, the FTC of a control law still has not been strictly and perfectly proven without the employment of the upper bound of system disturbances and uncertainties thus far.
Most of the above-mentioned high-order sliding mode guidance laws with FTC are designed for airborne missiles, where the commanded acceleration of the guidance law is usually assumed to be perpendicular to the missile velocity, mainly due to the aerodynamic force. Besides, the influence of dynamic lags on the guidance and control system is much more severe than that of the exoatmospheric interceptor. For exoatmospheric interception, based on the Lyapunov scalar differential inequality, Zhou et al. 40 proposed a novel finite time sliding mode guidance (FTSMG) law with a simple formation. The FTSMG was an extension of their previously proposed first-order sliding mode guidance law 10 and can guarantee the FTC and stability of the LOS rate in both of the planar and three-dimensional (3D) environments. The commanded acceleration of FTSMG is perpendicular to LOS, and the control purpose is to drive the LOS rate to zero or its small neighborhood. Like most sliding mode guidance laws, the prior knowledge of the upper bound of the target maneuvering acceleration needs to be initially known for this guidance law. Some researchers used observers to achieve the FTC features of the designed guidance laws, for example, extended state observer (ESO) 41 and finite time convergence disturbance observer (FTDOB). 42 Adaptive control methods were also used to design guidance laws for missile with dynamic lags 43 and impact angle constraints. 44
In this article, we propose a novel adaptive sliding mode guidance law (NASMG) against the maneuvering target which has arbitrary acceleration projections along and perpendicular to LOS. Our purpose is to improve the performance of FTSMG in Zhou et al., 40 without employing the prior knowledge of the upper bound of the target acceleration. Under this guidance law, the asymptotic convergence of the LOS rate from any initial value to zero can be guaranteed. And the FTC feature of the LOS rate to zero can also be guaranteed conditionally. Besides, the distribution of the commanded acceleration of NASMG will become more even than FTSMG, and the performance will become better, especially under the case that the target uses a small acceleration to maneuver while it actually has a large maneuverability. The work in this article can be taken as an improvement of the previously proposed FTSMG.
The structure of this article is organized as follows. In the “ Planar novel adaptive sliding mode guidance law” section, the 2D engagement kinematics will be introduced, and the design and analysis of the planar NASMG will be given. Then, this guidance law is extended to 3D space in the “Three-dimensional extension of NASMG” section. After that, the effectiveness of this guidance law is demonstrated by numerical simulations in the “Numerical simulation” section, and finally conclusions are drawn in the “Conclusion” section.
Planar novel adaptive sliding mode guidance law
Kinematics of planar engagement
The engagement geometry of planar interception is shown in Figure 1.

2D engagement geometry.
The relative position vector

where

And
The equations of motion are given by


where
Taking the derivatives of the above two equations yield


where

where g and f are unknown constants.
It is commonly accepted that, when the initial closing speed is much smaller than zero, nullifying LOS rate will lead to an interception. Then a guidance law can be designed as follows.
Assume that

where
Finite time stability of nonlinear systems
The finite time stability of a time-varying nonlinear system was proposed in Zhou et al. 40 and is employed in this article for the performance analysis of NASMG.
Definition 1
Consider a nonlinear system in the form of

where

Moreover, if the system (local) equilibrium
The following lemma 40 is popular in the guidance law design with FTC, for example, in Sun et al. 22 It will prove useful in the design of NASMG, and hence is employed here.
Lemma 1
Consider the nonlinear system described by equation (9). Suppose that there is a
The settling time is given by

Remark 1
Note that if
Novel adaptive sliding mode guidance law
For the time-varying nonlinear guidance system of equation (8), the guidance purpose is to nullify the LOS rate (i.e. nullify
Theorem 1
For the guidance system of equation (8), the NASMG is designed as

where k satisfies

and

where
Proof
First, we consider the situation that is satisfied during the guidance process

The following continuously differentiable positive-definite Lyapunov function in the neighborhood of the origin

In this article it is predefined that, for the n-order root of a negative real scalar, only the real root is valid. The complex roots are not considered here. Taking the derivative of

Substituting equation (12) into equation (17) yields

Substituting equation (15) into equation (18) and considering

During the guidance process, the following inequality must be valid 40

Therefore

Let

We have

Then, according to lemma 1

and

where

Hence, the LOS angular rate x converges to zero before t→∞.
Second, we consider the situation that equation (15) cannot happen during the whole guidance process, that is

Let

Taking the derivative of V2 yields

Substituting equations (12) and (14) into equation (29), we have

According to the above inequality, recalling equations (13) and (27), it can be deduced that

Else, considering equation (13), we have

According to equations (20) and (30)–(32)

Let

Then, combined with Barbalat’s Lemma,
45
Remark 2
NASMG is a non-smooth controller which involves a signum function. This indicates that the control variable sometimes switch. In practical systems, the switching cannot be completely instantaneous, and the delay of switching will induce the chattering effect. To remove the chattering, the signum function needs to be smoothed. This is usually done by replacing the signum function with a saturation function

where δ is a small positive constant. The updating law of

since there is no need to increase
Remark 3
According to the expression of NASMG of equations (12)–(14), this guidance law is constructed with three terms: the first one is a PN term, which functions as the traditional PN law; the second one is the adaptive variable structure term, which is used to compensate for the target acceleration; and the last one is the convergence time control term, which reduces the convergence time of the control law. Therefore, NASMG can also be taken as an augmented PN guidance law, which is with similar measurement requirements but has a better guidance performance compared to PN.
Three-dimensional extension of NASMG
The construction of FTSMG in 3D space has been discussed in Shin et al. 46 In this section, the NASMG will be extended in 3D environment by using the same method.
Extension of NASMG in 3D environment
Traditionally, the 3D pursuit was dealt with by constructing two independent guidance laws in the pitch and yaw planes of the missile respectively and considering the cross-coupling effect.47–49 However, in this way the description of the relative motion was quite complex due to the cross-coupling and too many variables were involved.
Using the kinematic equations established in the rotating coordinate system of LOS can simplify the description of the 3D relative motion so that it can be divided into two decoupled sub-motions:50–54 (1) the relative motion in the engagement plane spanned by the relative position and velocity vectors and (2) the rotation of this plane. In this section, we will realize the NASMG in 3D space by directly constructing a planar NASMG in the relative engagement plane.
Figure 2 depicts the 3D pursuit geometry, where
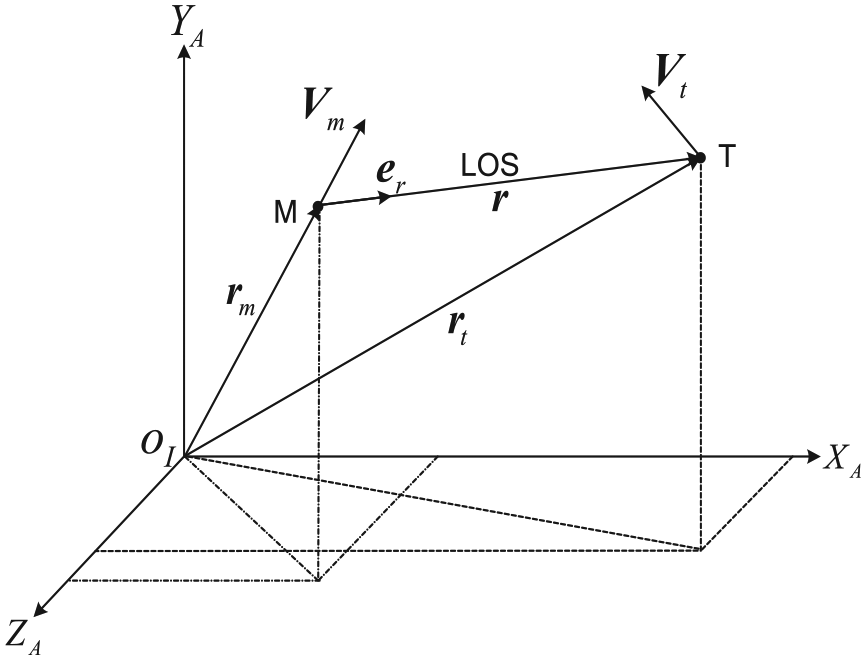
3D engagement geometry.
The LOS kinematic equation set is

where
The relative kinematic equation set between the missile and target is

where
The 3D LOS rate


where k is determined by equation (13). Note that there is no sign function in equations (39) and (40). The reason is that
Realization of 3D NASMG
The missile seeker usually measures the LOS elevation angle
The inertial coordinate system

Geometric relationship among three coordinate reference systems.
In Figure 3,

The angular velocity of LOS coordinates is

Since

Comparing equation (43) with the first equation of equation (37), the result is
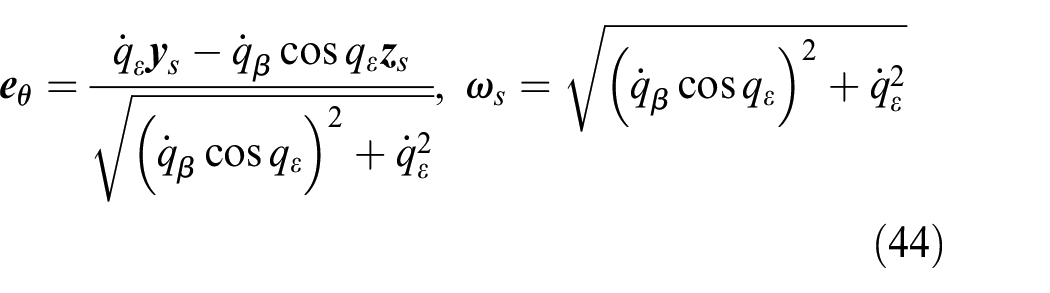
Recalling

Then, the measurements of
Remark 4
During the guidance process, usually the LOS angles of


where

Therefore, the 3D NASMG with the saturation function guides the LOS rate to converge into a boundary layer
Numerical simulation
A space interception problem is simulated in this section. An inertial reference system with origin initially fixed at the center of the launch site at the instant of launch is used. The X axis is in the horizontal plane and is along the launch direction. The positive Y axis is vertical to the horizontal plane. And the Z axis forms a right-hand coordinate system with the other two axes together. The initial states of the missile and target are shown in Table 1.
Initial states of missile and target.
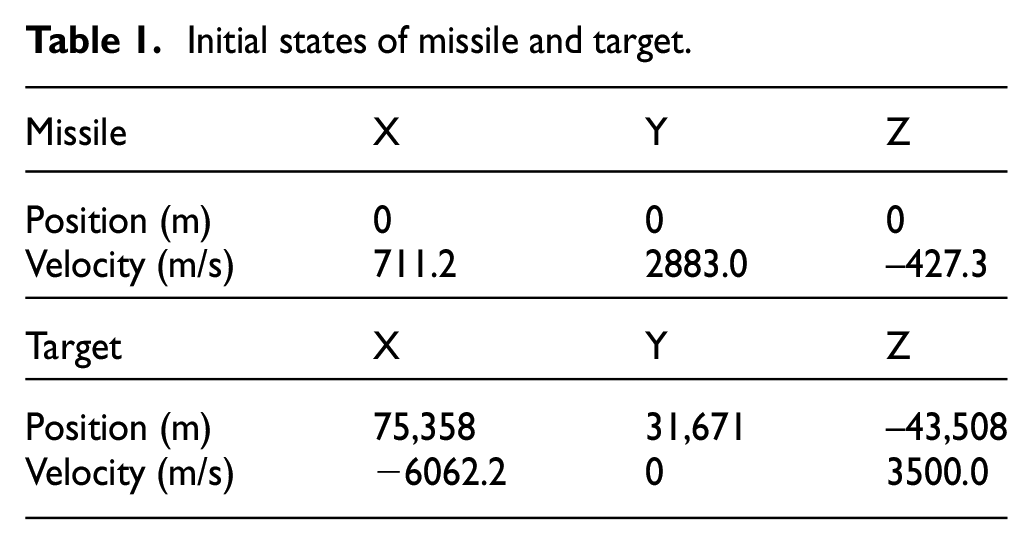
The maximum translation accelerations of the missile in the elevation and azimuth directions are assumed to be equal to 30 m/s2. The sample period of the interceptor seeker is 10 ms. The 3D NASMG of equations (46)–(48) is used. For comparison, FTSMG in Zhou et al. 40 is also considered which can be directly constructed in the engagement plane and whose formation becomes 46

where
As we know, for PN guidance laws, the navigation gain N is usually 3–5. In this section, we set N = 3 for both NASMG and FTSMG. The influences on the guidance effect caused by parameters of
Case 1
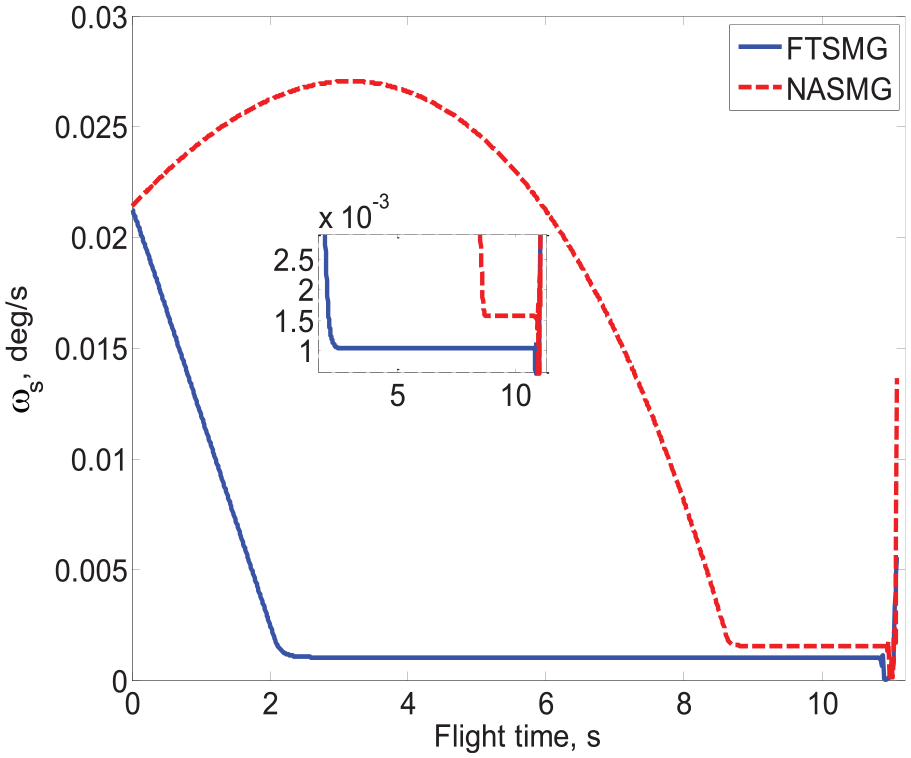
Assume that the target escapes with constant acceleration component
From Figure 4, we can see that the 3D LOS rate of FTSMG can converge to the boundary layer of

3D LOS rate in case 1.
The LOS azimuth and elevation rates
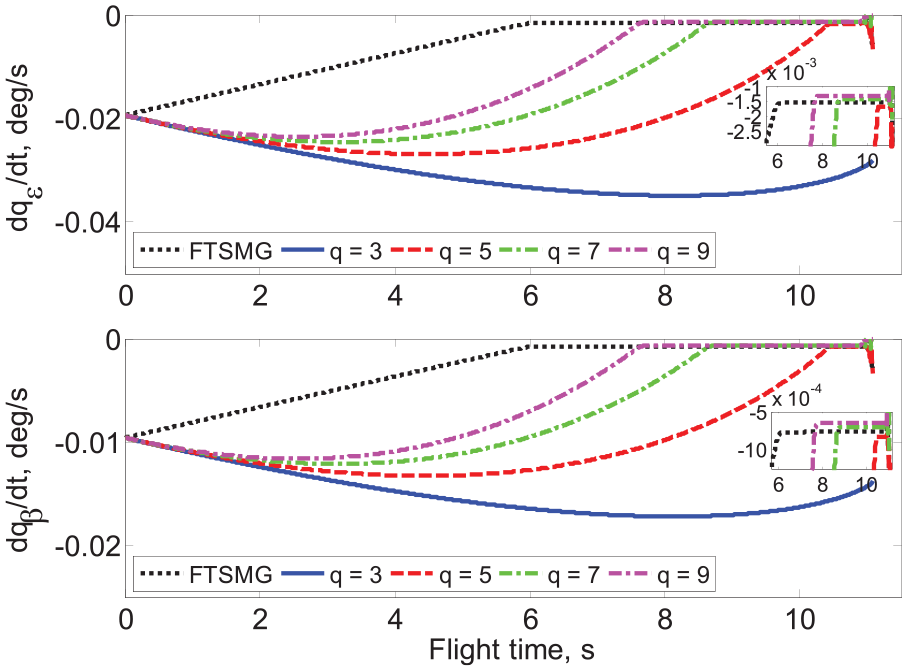
LOS elevation and azimuth angular rates in case 1.
According to Figure 6, the total commanded acceleration

Total missile commanded acceleration in case 1.
The lateral missile commanded accelerations

Lateral missile commanded accelerations in case 1.
The estimation of the upper bound of the target acceleration

Estimation of the upper bound of the target acceleration and the absolute value of the variable structure term of NASMG in case 1.
The zero effort misses (ZEMs) of both guidance laws are shown in Figure 9. We can see that ZEM of FTSMG converge to zero with the most rapid speed. For NASMG, as q increases, the convergence rate of ZEM is increased.

Zero effort miss in case 1.
It is noticed that there are abrupt increases and vibrations of
From the updating law of equation (48) we can see that the influence of p on the performance of NASMG works as the adverse effect of q. Hence, for the length of this article, we do not demonstrate the effect of p here. According to the simulation results in this case, it can be concluded that p and q must be chosen properly, since a large “p/q” may result into a non-convergent LOS rate and a small “p/q” may cause large
Case 2
Assume that the target escapes with constant acceleration component atθ = 6.5 (1 +sin(2πt+π/4)) m/s2. The guidance parameters of FTSMG and NASMG are the same as those in case 1. The miss distances of both guidance laws are less than 0.01 m. The simulation results are shown in the following figures.
According to Figures 10–15, we can see that the performance of FTSMG and that of NASMG under the sinusoidal target maneuvering acceleration are quite similar as those under the constant target maneuvering acceleration. Since a large prior estimation of the upper bound of the target acceleration is used for FTSMG, the convergence rate of 3D LOS rate is the fastest. However, a large initial commanded acceleration is also needed for FTSMG. For NASMG, the convergence rate of 3D LOS rate is influenced by the guidance parameters of k, p, and q. The influence effects of these guidance parameters are similar as those in Case 1. Hence, in the following discussion, only constant target maneuvering acceleration is considered.

3D LOS rate in case 2.

LOS elevation and azimuth angular rates in case 2.
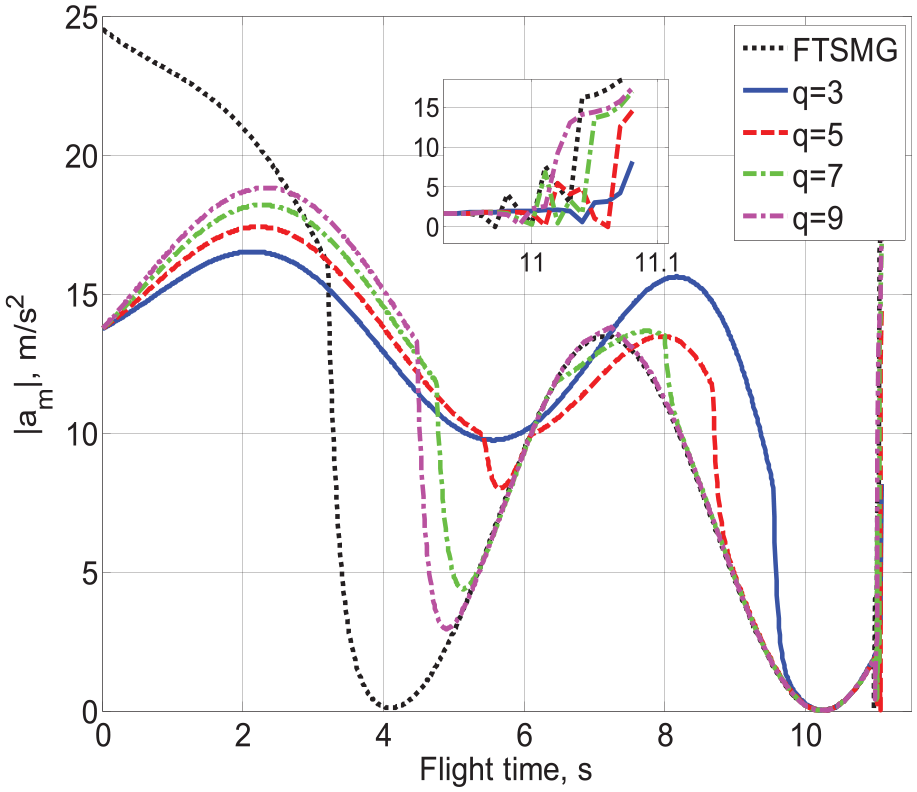
Total missile commanded acceleration in case 2.

Lateral missile commanded accelerations in case 2.
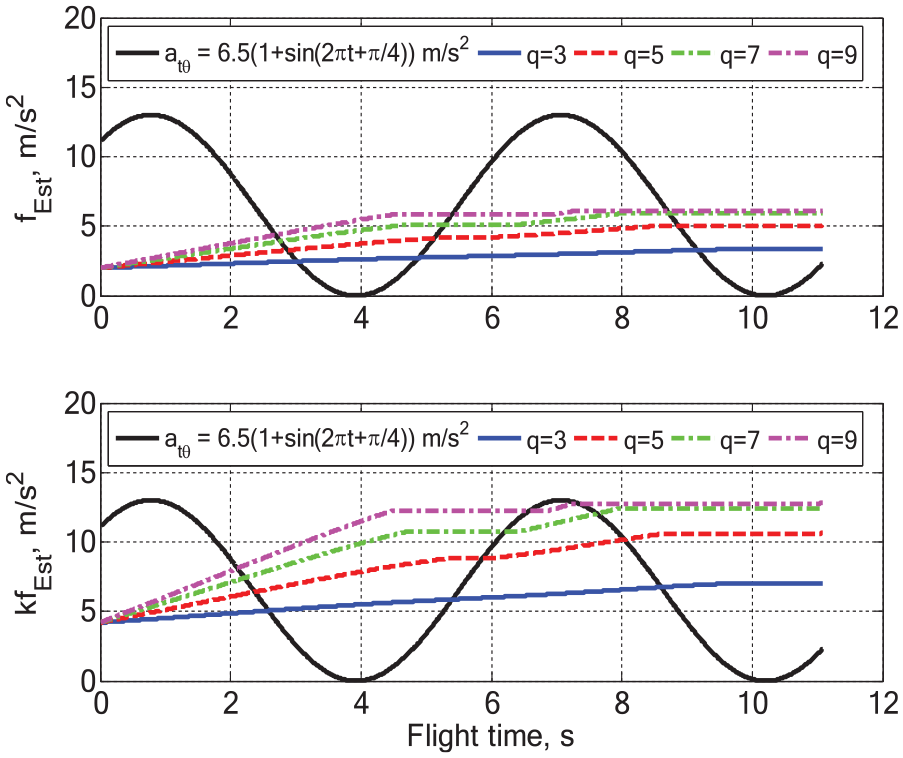
Estimation of the upper bound of the target acceleration and the absolute value of the variable structure term of NASMG in case 2.

Zero effort miss in case 2.
Case 3
The target acceleration and FTSMG are the same as those in case 1. Apply the NASMG with
According to Figure 16 we can see that, in this case, as k increases, the convergence rate of

3D LOS rate in case 3.

LOS elevation and azimuth angular rates in case 3.
The commanded accelerations of both guidance laws in this case are shown in Figure 18. It can be seen that as k increases, the initial and peak values of

Total missile commanded acceleration in case 3.
The curves of

Lateral missile commanded accelerations in case 3.
The curves of

Estimation of the upper bound of the target acceleration and the absolute value of the variable structure term of NASMG in case 3.
The ZEMs of both guidance laws in this case are shown in Figure 21. It can be seen that as k increases, the convergence rate of ZEM of NASMG to the neighborhood of zero is increased, and ZEMs of NASMG with k = 3 and 4 converge to the neighborhood of zero faster than that of FTSMG.

Zero effort miss in case 3.
According to the simulation results in this case, k should not be chosen too large for NASMG, since a large k usually results in a large variable structure term
Case 4
The target acceleration and FTSMG are the same as those in case 1. Apply the NASMG with
From Figure 22 it can be seen that as
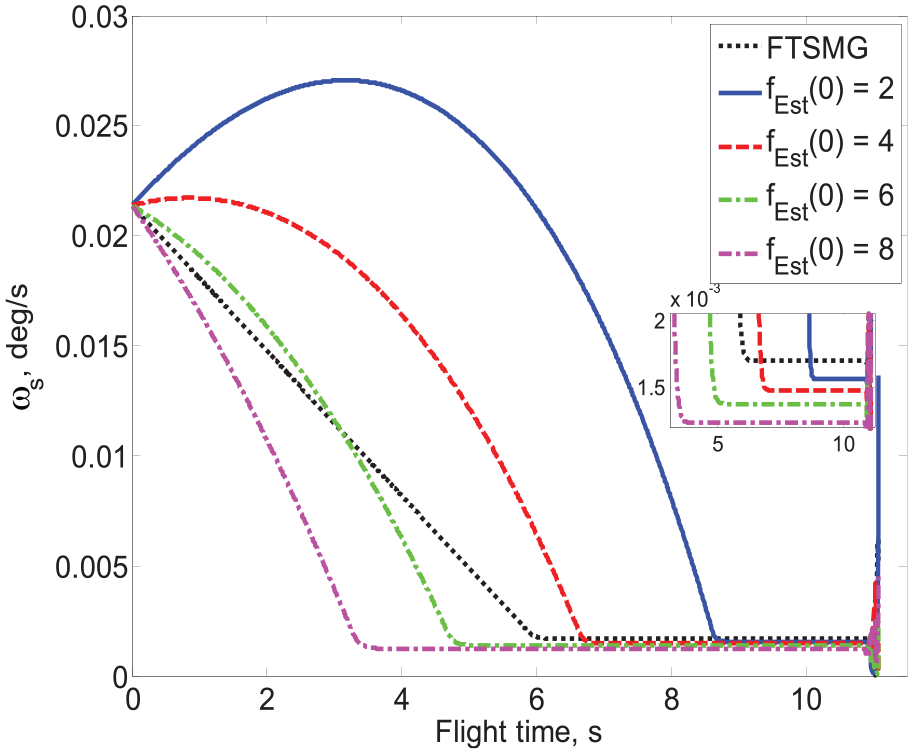
3D LOS rate in case 4.

LOS elevation and azimuth angular rates in case 4.
According to Figure 24, as

Total missile commanded acceleration in case 4.
The curves of

Lateral missile commanded accelerations in case 4.
The curves of

Estimation of the upper bound of the target acceleration and the absolute value of the variable structure term of NASMG in case 4.
The ZEMs of both guidance laws in this case are shown in Figure 27. It can be seen that as

Zero effort miss in case 4.
According to the simulation results in this case, a small
In the above four cases, the variable structure term of FTSMG is close to the magnitude of the target acceleration, which provides FTSMG with a good performance. However, in practical interception scenarios, sometimes the target may use a small acceleration while it has a large maneuverability. In the following case, this situation will be discussed.
Case 5
The target acceleration is the same as those in case 1. For FTSMG, we assume
According to Figure 28 it can be seen that, for FTSMG with a large
3D LOS rate in case 5.

LOS elevation and azimuth angular rates in case 5.
From Figure 30 it can be seen that the initial commanded acceleration of FTSMG is quite large and it converges to a constant value after
Total missile commanded acceleration in case 5.

Lateral missile commanded accelerations in case 5.
The estimation of the upper bound of the target acceleration of NASMG is shown in Figure 32. We can see that the variable structure term finally gets bigger than the upper bound of the target acceleration, which provides NASMG with the FTC feature.

Estimation of the upper bound of the target acceleration and the absolute value of the variable structure term of NASMG in case 5.
The ZEMs of both guidance laws are shown in Figure 33. It can be seen that both ZEMs converge to the neighborhood of zero in finite time, and the convergence rate of ZEM of FTSMG is faster than that of NASMG.

Zero effort miss in case 5.
It can be concluded from the above simulation results and discussions that the proposed NASMG can guarantee the asymptotic convergence of the LOS rate of the guidance system. If the guidance parameters are properly chosen, even the FTC feature of the guidance system can be guaranteed by NASMG. The performance of NASMG can be comparable to or even better than that of the previously proposed FTSMG, especially when the target adopts a small maneuvering acceleration while it actually has a large maneuverability. Besides, the prior knowledge of the target acceleration is no longer needed.
Through the above simulation and discussion, the advantage of NASMG over FTSMG has been demonstrated. In the following case, the performance of NASMG will be compared with that of the traditional PN guidance law when the maneuverability of the target is comparable to that of the missile.
Case 6
Assume that the target escapes with constant acceleration component
From Figure 34 it can be seen that, when N = 3–5, the LOS rate will go to infinite in the end of the guidance process. This causes the commanded acceleration of PN to go up beyond the maximum value of the acceleration that can be provided by the interceptor, as shown in Figures 35 and 36. PN with N = 6 can limit the LOS rate in a certain range; however, the LOS rate is generally increasing during the guidance process, and hence the commanded acceleration is also generally increasing, as shown in Figures 35 and 36. NASMG with properly chosen guidance parameters can guarantee the FTC of the LOS rate, and hence the commanded acceleration also converges to certain value during the guidance process. The curves of

3D LOS rate in case 6.

Total missile commanded acceleration in case 6.
Lateral missile commanded accelerations in case 6.
LOS elevation and azimuth angular rates in case 6.
The estimation of the upper bound of the target acceleration of NASMG is shown in Figure 38. We can see that the variable structure term gets bigger than the upper bound of the target acceleration around about 7 s, which provides NASMG with the FTC feature.

Estimation of the upper bound of the target acceleration and the absolute value of the variable structure term of NASMG in case 6.
The ZEMs of both guidance laws are shown in Figure 39. It can be seen that PN with N = 3–5 cannot guarantee the convergence of ZEM to zero or its small neighborhood. PN with N = 6 can guarantee the convergence of ZEM; however, its convergence speed is slower than that of NASMG. The miss distances of both guidance laws are given in Table 2.

Zero effort miss in case 6.
Miss distances of PN and NASMG.
PN: proportional navigation; NASMG: novel adaptive sliding mode guidance law.
Conclusion
The NASMG proposed in this article is based on a novel tunable adaptive estimator of the upper bound of the target acceleration. The NASMG can be taken as an improvement of the previously proposed FTC sliding mode guidance law (FTSMG). NASMG can guarantee the asymptotic convergence of the LOS rate of the guidance system, while the prior knowledge of the upper bound of the target acceleration is no longer needed. The updating law of the estimator of the upper bound of the target acceleration is tunable, which makes NASMG more robust to uncertainties and disturbances of the guidance system. Second, the NASMG is extended to the 3D space with the help of the relative kinematic equations in the rotating LOS coordinate system. The realization method of the 3D NASMG in the traditional LOS coordinate system is also provided. Finally, a comparison between NASMG and FTSMG is conducted by using numerical simulations which indicates that the performance of NASMG is comparable or even better than that of FTSMG. The comparison of NASMG and PN with different navigation gains is also conducted, when the maneuverability of the target is comparable to that of the missile.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was co-supported by the National Natural Science Foundation of China (Grant Nos. 61690210(2017-2021) and 61690213(2017-2021)) and the Hunan Provincial Natural Science Foundation of China (2019JJ50736).