
Abstract
This paper deals with the design of a variable gain super-twisting algorithm-based controller to solve the high tracking performance, low identification cost, and parameter tuning problem for rapid prototyping manipulators. The key elements of the proposed controller approach are the inverse dynamics-based controller, tracking differentiator (TD), and the variable gain super-twisting algorithm (VGSTA) controller. The inverse dynamic controller relies on part of the dynamic model information, which reduces the identification cost and decouples the manipulator’s torque input. The motion for using VGSTA, apart from its property of providing robustness to the system with respect to the unmodeled part and uncertainties, is also given by its capability of enforcing the controlled objects to the sliding surface in finite time and more explicit tuning parameter, allowing one to tune the system dynamic performance more simply. The proposal has been verified in a 3D-printed rapid prototyping manipulator, the experiment includes the parameter tuning experiment and the controller dynamic performance experiment. The manipulator’s dynamic performance and robustness are identified on the basis of the above experiment.
Introduction
With the development of the 3D-print tech, the 3D-printed manipulator has wildly applications in rapid prototyping,1–4 because it allows producing complex and custom shapes in small batches at a low cost, and this manufacturing technique is useful when developing products at the prototype stage. 5 However, the manipulator controller design is a challenge because of its nonlinear dynamics and load disturbance. Especially for rapid prototyping, to realize the manipulator’s high-performance control, it’s necessary to identify the parameters of the manipulator. However, the process of identification causes certain difficulties and increases the cost of the manipulator development. 6 To reduce the above identification cost, the PID controller is widely used in robot manipulator control,5,7,8 but its dynamic performance is limited and parameter tuning is complicated when the manipulator is multi-joint. Combining the above model-based controller and model-free controller problem, it is necessary to design a controller that makes the trade-off between the dynamic model identification cost and controller performance for the 3D-printed rapid prototyping manipulator.
It is well-known that a PID controller is widely used in the robot manipulator, especially for the rapid prototyping manipulator, because it is model-free and can realize the fast deployment of the prototype manipulator. In PID control, 9 the asymptotic stability of linear PID was proved under the condition that the reference trajectory is constant. However, the PID parameters’ stability condition is not explicit and the parameter tuning process is difficult. Model-based compensation with PD control is an alternative method for PID control, such as the PD controller with gravity compensation. 9 However, this gravity compensation controller and PID controller cannot render asymptotic stability for tracking tasks. 10 To improve tracking performance, “PD+” controller can realize globally stable tracking control, 11 but to realize the “PD+” controller, the full dynamic model is needed which increases the identification cost, and “PD+” controller lacks compensation for the uncertain part and disturbance of the manipulator. 12 proposed a neural-compensate-based PID controller to compensate for the uncertainty or disturbance in the manipulator, although this controller is a model-free controller, it needs a pre-trained model and high real-time performance. The extended states observer (ESO) can realize the uncertain model observation and the ESO-based feedforward system like ADRC was wildly used in the robot manipulator system.13–15 Although the ESO-based controller can solve the uncertain model, it is hard to prove the system’s stability when it deals with a nonlinear system. 16
The sliding mode control (SMC) is a special mode in the variable structure system (VSS).
17
It’s one of the most useful robust controllers because of its ability to reject disturbance and model uncertainty, with wide applications for handling the uncertainty model, such as power system,18–21 DC motor control,
22
and electric vehicles.
23
However, the SMC has the disadvantage of the chattering
24
which is one of the limitations of the controller performance. To address chattering and ensure that the system trajectory stays on the surface, several strategies were developed, In González-Jiménez et al.,
25
Ren et al.,
26
and Conejo-Benitez et al.,
27
the control law can be divided into two parts: the equivalent control part
In Dávila et al., 31 this paper proposes a second-order SMC to reduce the chattering which is named the variable gain super-twisting algorithm (VGSTA), the VGSTA assumes the uncertain model is a bounded function and divides the system into sliding surface coupled part and differentiable part, providing compensation to above uncertain part. Finally, the stability of the controller can be proved, and this controller has the advantage of strong robustness and the sliding surface will be reached in a finite time.
In this paper, inspired by Dávila et al., 31 taking into account the requirement of prototyping manipulator high-performance control, and having the aim of reducing the identification cost, an alternative robust VGSTA-based manipulator controller is proposed. The main contributions of this paper are summarized as follows: (1) a low-identification-cost algorithm is developed for prototyping manipulator with performance between the model-free controller and high high-precision model-based controller (2) the proposed controller has the clear tunning parameter which can adjust the internal parameters to achieve specific physical performance (such as the sliding surface’s reaching time, the system’s tracking error, etc.) (3) the system has the finite time to converge the sliding surface.
The rest of this paper is organized as follows. In Section 2, the problem model of the robot manipulator is introduced and solved by the VGSTA method. Finally, the finite-time convergence of the sliding variable is analyzed by the Lyapunov theorem. The simulation and experiment results are given in Sections 3 and 4 followed by a conclusion in Section 5.
Problem formulation
In this section, a robust control scheme focusing on compensating the unmodeled part and reducing identification cost was proposed as shown in Figure 1. More specifically, the control scheme consists of three parts: Dynamic inverse part, VGSTA part, and Tracking differentiator part. A Dynamic inverse part aimed at decoupled torque input to realize the basic structure of the VGSTA, based on an inertia matrix
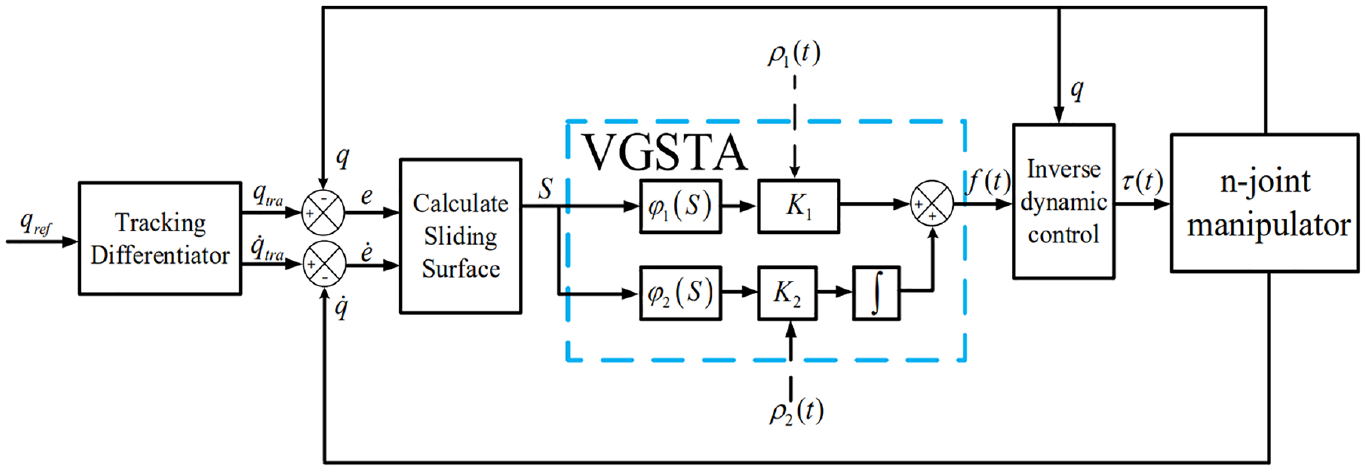
Scheme of the overall VGSTA control for robot manipulators.
Manipulator dynamic model
Consider a perturbed n-joint robotic manipulator system described by the following model:

where
Property 1:
Property 2: There exist positive constants

Then, transform (1) into a joint angular acceleration expression:

Transforming (2) to the sliding surface differential form:

where
Inverse dynamic control
To realize the high-performance manipulator trajectory planning and control algorithm implementation, the so-called inverse dynamics approach 33 is used. The inverse dynamics of the robot manipulator can be written, as an auxiliary input and torque output nonlinear equation:

where
In an effort to decouple the manipulator input torque to realize the VGSTA and reduce the identification cost. The inverse dynamics control of the manipulator in Figure 1 can be simplified to the inertia matrix

where
By substituting (5) into (3), the sliding surface equation can be obtained as:

where
VGSTA controller
The torque input of the joint



where
Noting that:

Considering the torque input

Assuming the right side of the input torque

where

where
To sum up, the (6) can be transformed into:


where
The sliding surface si in this system can reach the si = 0 in finite time T when gains k1ik2i meet the following requirements:
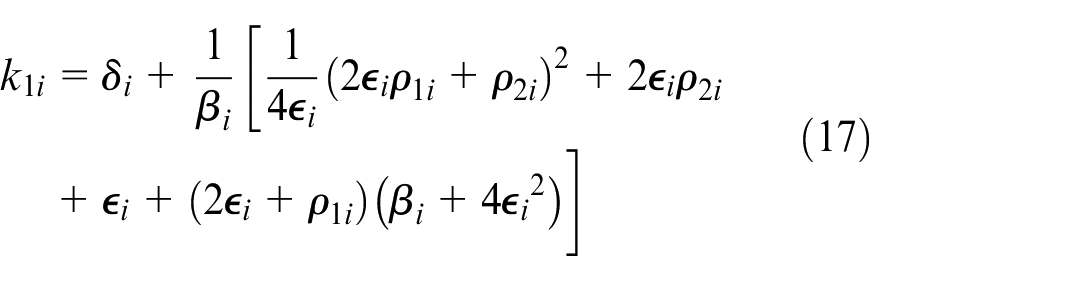

where


where
Stability proof
Choose the function (20) as the Lyapunov function:

where
According to the (10), (15), and (16), the derivative of
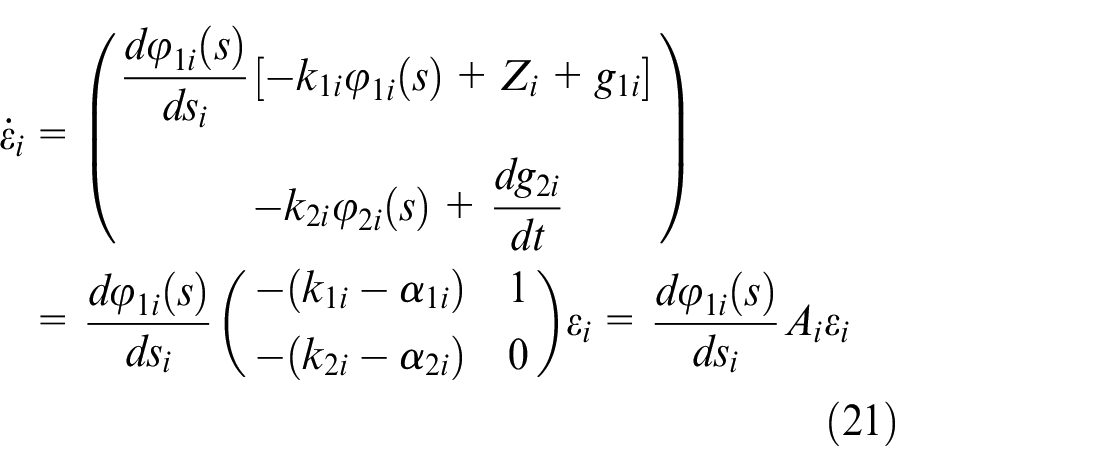
where
To calculate the derivative of the Lyapunov function:
With the bounded parameter

where
According to the Lyapunov stability theorem, the sliding surface
Convergence proof
Since

and based on the definition of
To sum up:
where
Based on inequality in (28), the reaching time of the sliding surface

and assume the
Let
To sum up, a single joint
The reaching time of the single joint

where

To sum up, the single joint sliding surface can converge to zero in finite time and the reaching time in (19) is proved by letting (33) equal to zero.
Tracking differentiator
To calculate the sliding surface
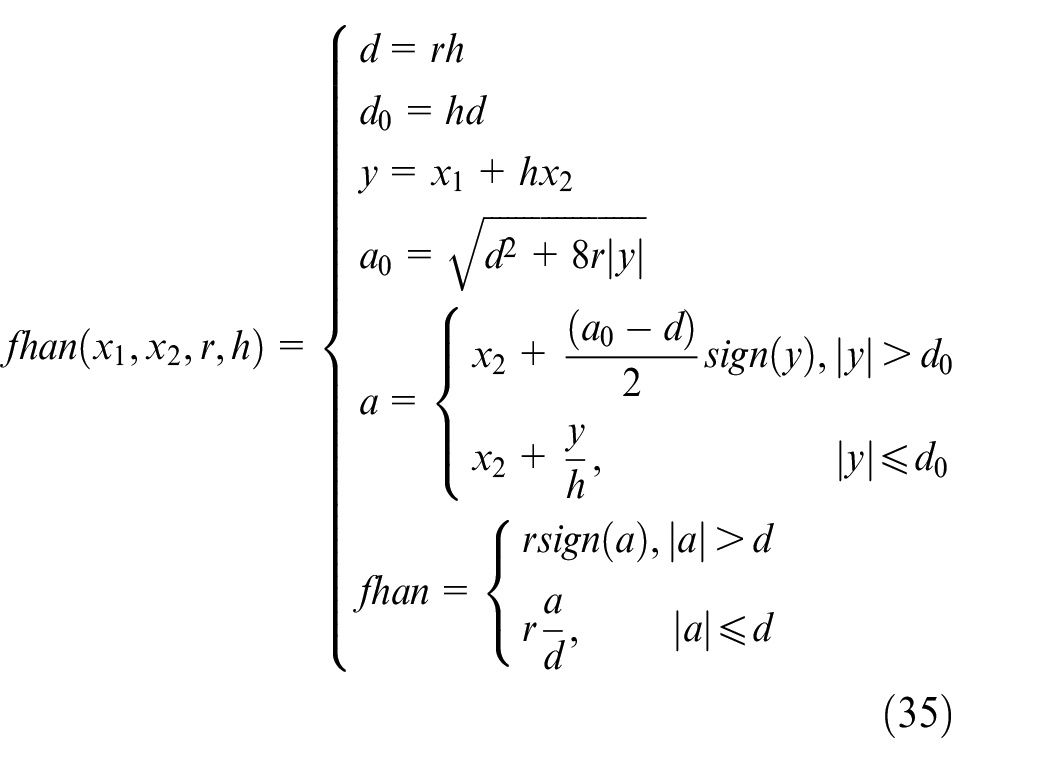
where
Simulation
In this section, a 3DOF robot manipulator simulation experiment based on MATLAB/Robotics Toolbox is performed to evaluate the performance of the proposed VGSTA-based controller, and the reference trajectories are given by:

To verify the dynamic performance of the VGSTA controller, The present controller will be compared with the nonsingular terminal sliding mode controller (NTSMC) 37 which needs the full kinetic model, and model-free controller (PID). As shown in Figure 2: the VGSTA controller can be well-handled multi-joint manipulator control with the partial kinetics model, its transient performance and tracking performance are between the full kinetic model-based controller (NTSMC) and the model-free controller (PID), which can be well-handled the fast-prototyping manipulator with the certain dynamic performance requirement.
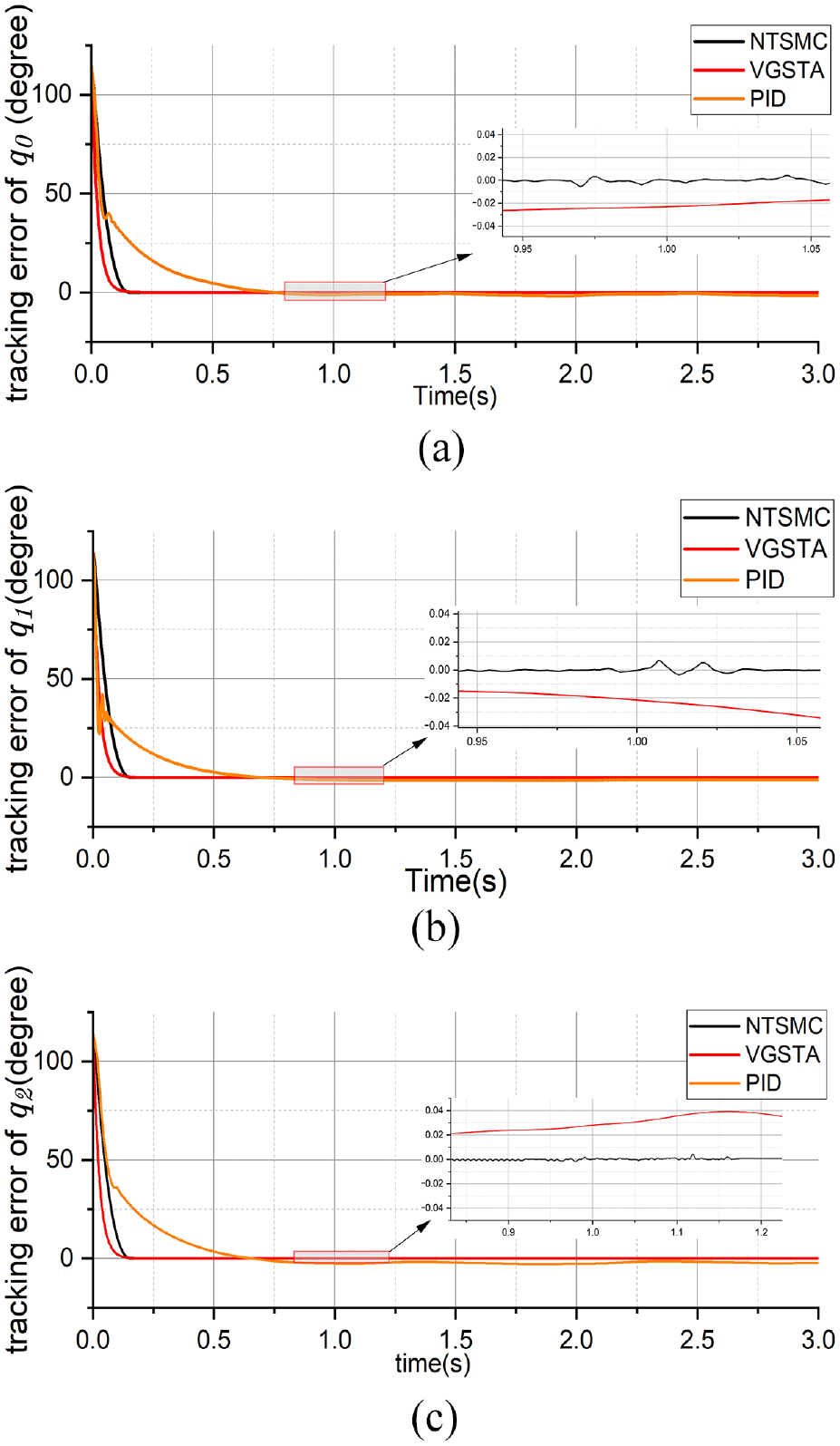
Tracking error simulation: (a) tracking error of joint q0, (b) tracking error of joint q1, and (c) tracking error of joint q2.
Experiment
In this section, the parameter tuning experiment is proposed which includes tracking performance tuning and dynamic performance tuning. And the effectiveness of the proposed controller in (7)–(9) is verified by the tracking experiment and comparison with the PID controller in PID control
9
and the nonsingular terminal sliding mode controller (NTSMC) in Feng et al.
37
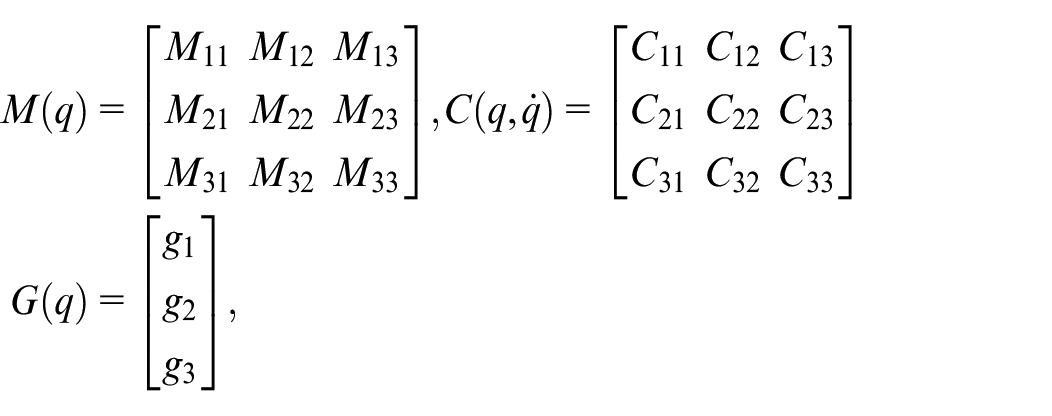
The inertia matrix
Figure 3(a) and (b) show the 3DOF manipulator in this experiment is made by 3D-print tech. Its three joints are actuated by brushless DC servo motors which communicate with the controller (STM32F427IIH6) via the CAN bus. As shown in Figure 3(b), the manipulator parameter
where
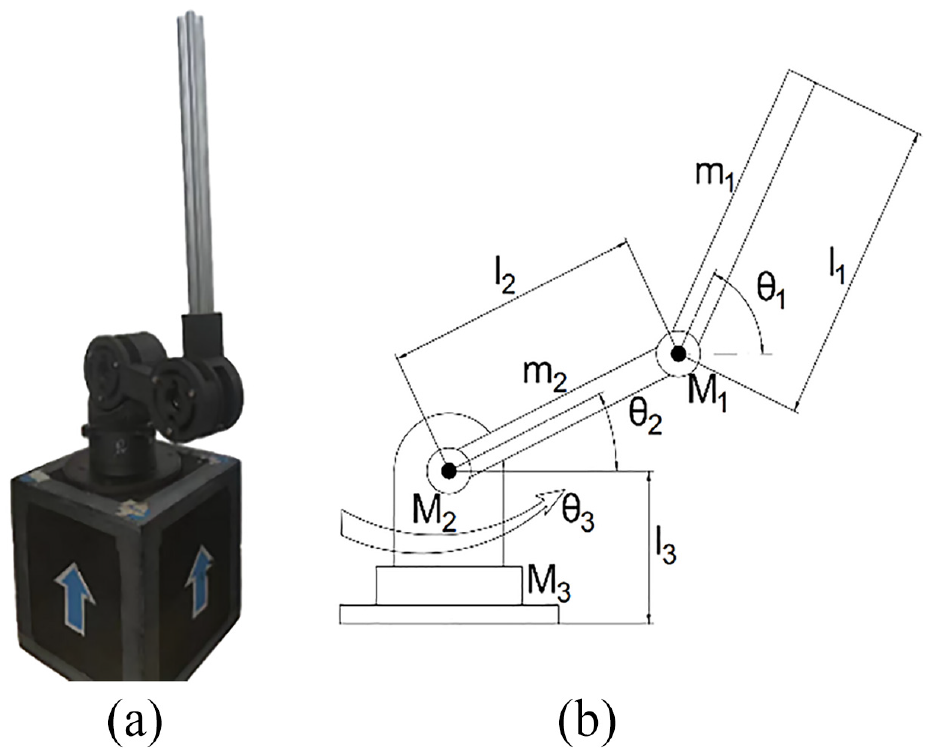
3D-printed manipulator: (a) experiment manipulator and (b) schematic diagram of the experimental manipulator.
Control objective & parameter tuning strategy
For the VGSTA controller in the system (10), we seek to tune suitable parameters to achieve the following objectives:
Steady performance requirement
Regulate the joint angle

for actual turning, the steady performance requirement can be reduced to:

To achieve the above steady performance requirement, the parameter tuning process can be divided into the following parts:
Phase error tuning
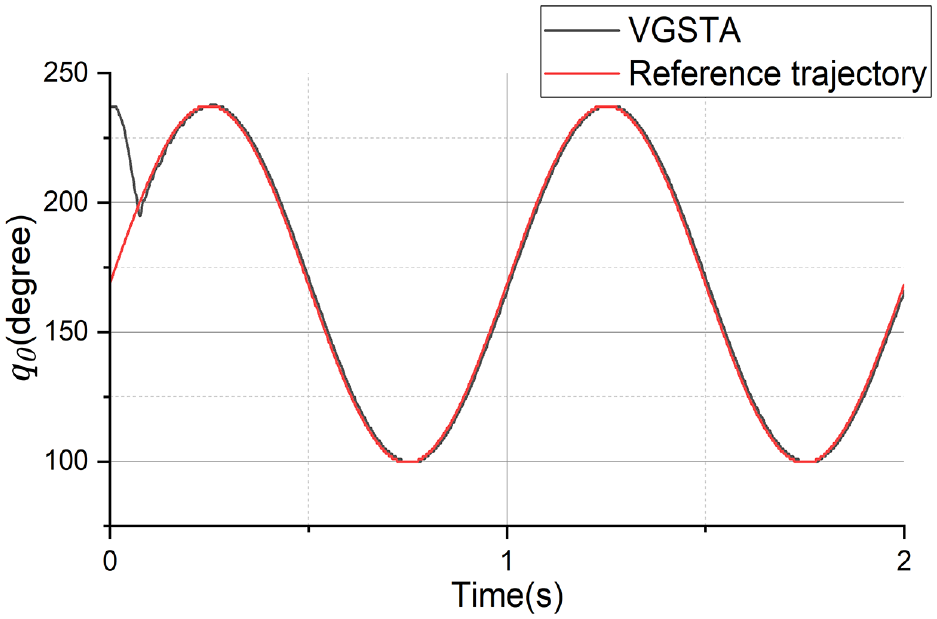
The phase error (such as Figure 4) in the system (1) mainly comes from the TD in (34), and (35), the tracking error can be reduced by increasing the tracking rate parameter
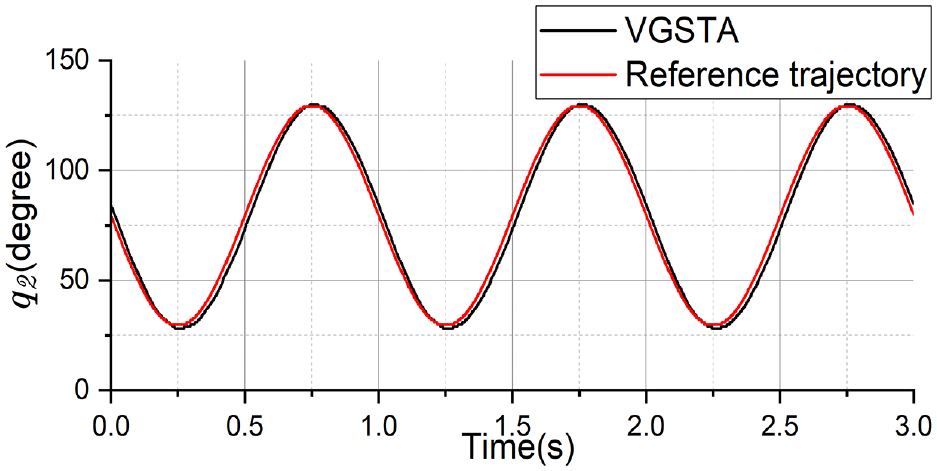
Before phase difference tuning.
Stability tuning
Stability tuning is necessary for the steady performance requirement due to the well-tuned VGSTA controller can enforce the system phase plane into the sliding surface, making the error gradually converge to zero. According to (24) and (25), the sliding surface stability can be determined by the parameter
Sliding surface tuning
According to the sliding surface
Overshoot performance requirement
Regulate the system output error overshoot

To achieve the above steady performance requirement, the parameter tuning process can be divided into the following parts:
Convergence time tuning
The reaching time of the sliding surface during the transient time is one of the causes of overshoot. When the overshoot problem occurs, according to (19), the convergence time can be reduced by increasing the parameter
Transient reference trajectory tuning
The TD can not only calculate the differential of the reference trajectory
Sliding surface tuning
According to the differential (19), reducing the sliding surface gain
Parameter tuning experiment
In this contrast experiment, the trajectory signal:

is selected as the reference trajectory signal. And the VGSTA turning process as flows:
Select the discrete cycle as step h, and estimate the rate
Estimate the
Gradually increase the
After the above dynamic performance tuning, it’s necessary to tune the transiting process. As we can see the overshoot problem in Figure 7. According to the convergence time tuning mentioned above, Increasing the parameter
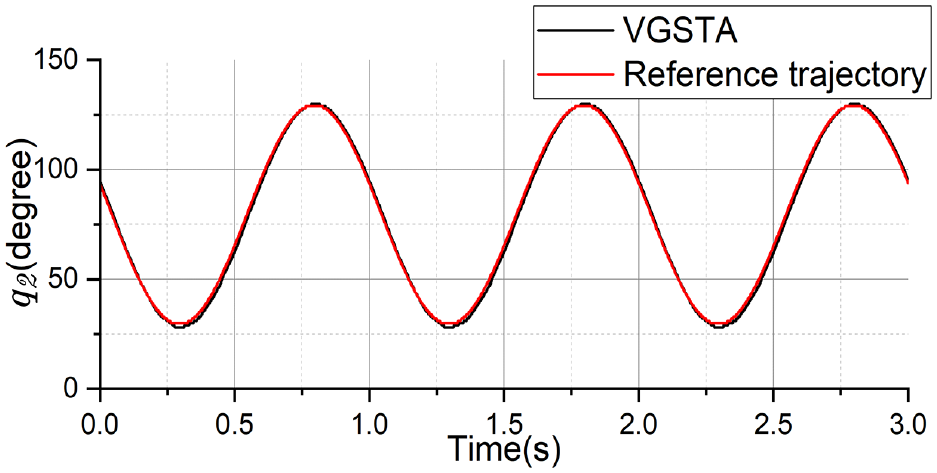
After phase difference tuning.
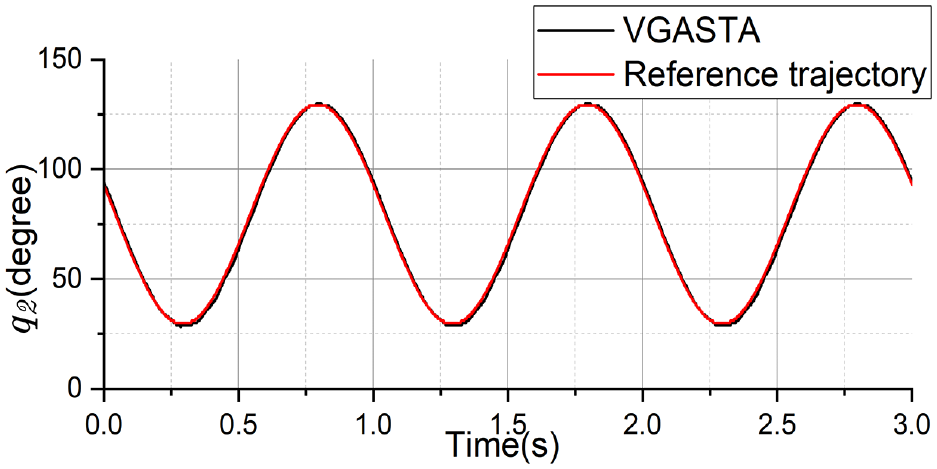
After tracking error tuning.
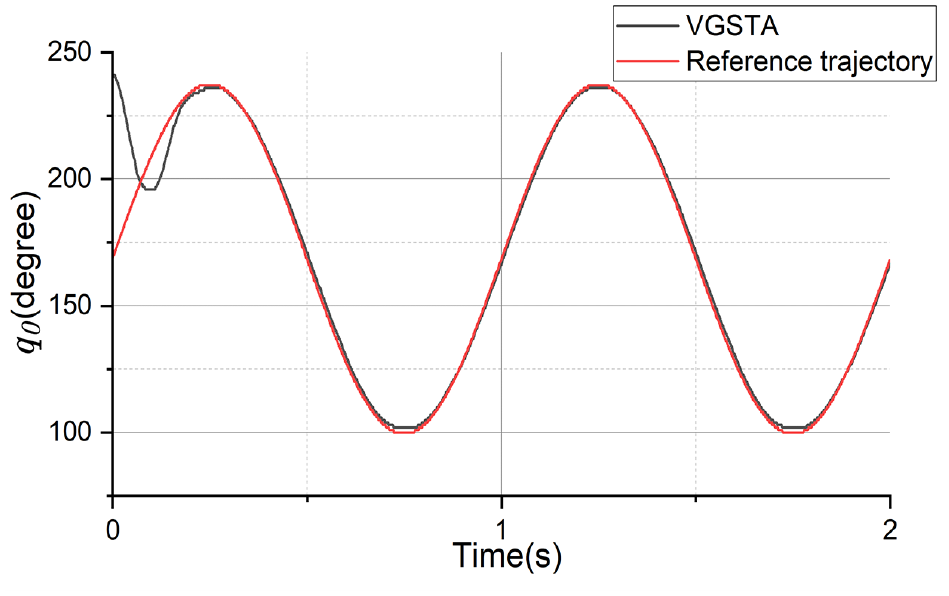
Before overshoot tuning.
After overshoot tuning.
Dynamic performance experiment
The contrast tracking results of each joint’s angle are presented in Figures 9 –11. The result investigated that the VGSTAs’ transient performance and tracking accuracy are between the model-free controller (PID) and high identification cost controller (NTSMC), and the further comparison of the above performance is shown in Table 1:
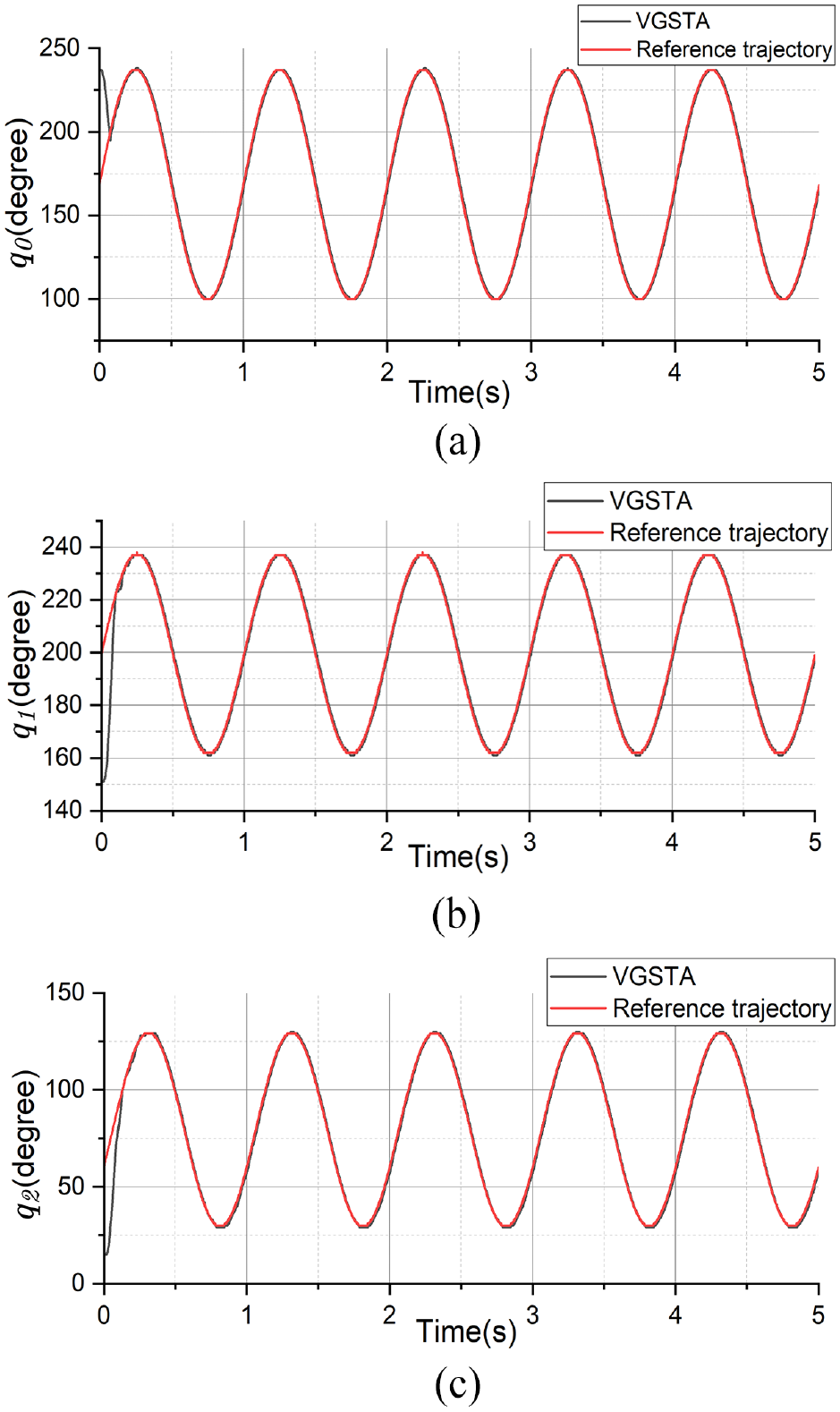
Position tracking results of the VGSTA: (a) tracking error of joint q0, (b) tracking error of joint q1, and (c) tracking error of joint q2.
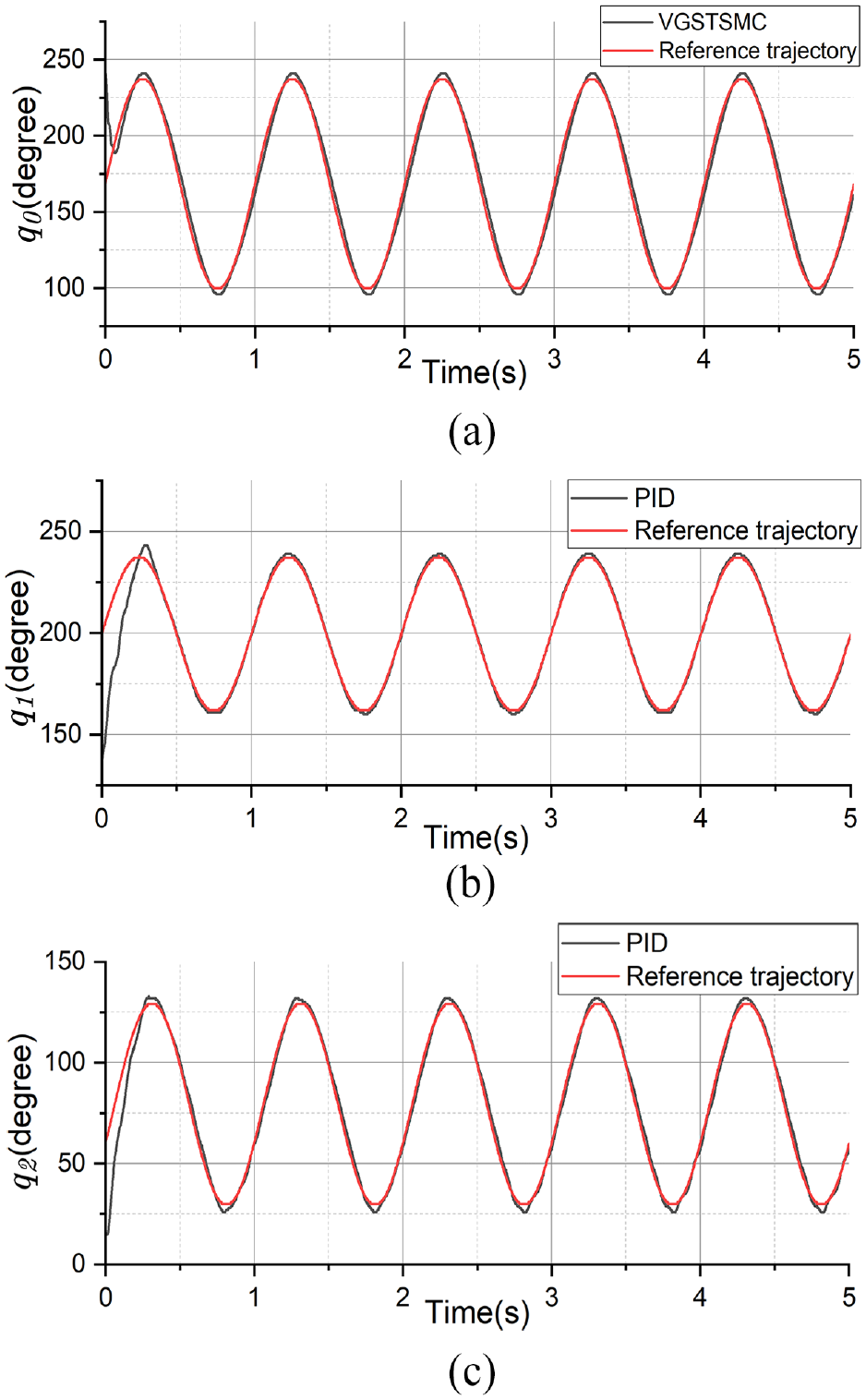
Position tracking results of the PID: (a) tracking error of joint q0 (b)tracking error of joint q1 and (c) tracking error of joint q2.
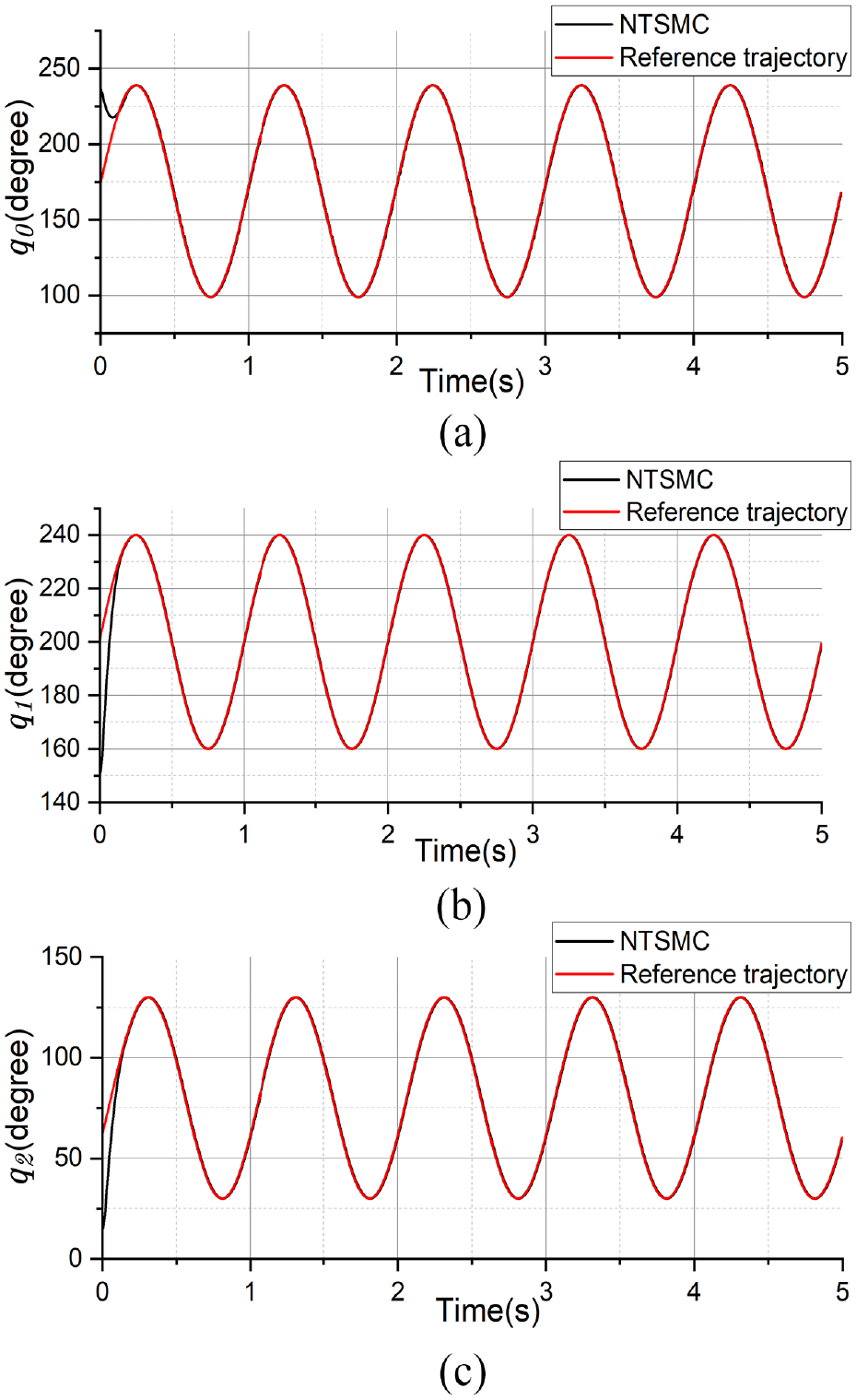
Position tracking results of the NTSMC: (a) tracking error of joint q0, (b)tracking error of joint q1, and (c) tracking error of joint q2.
The average tracking error and reach time of different algorithm.
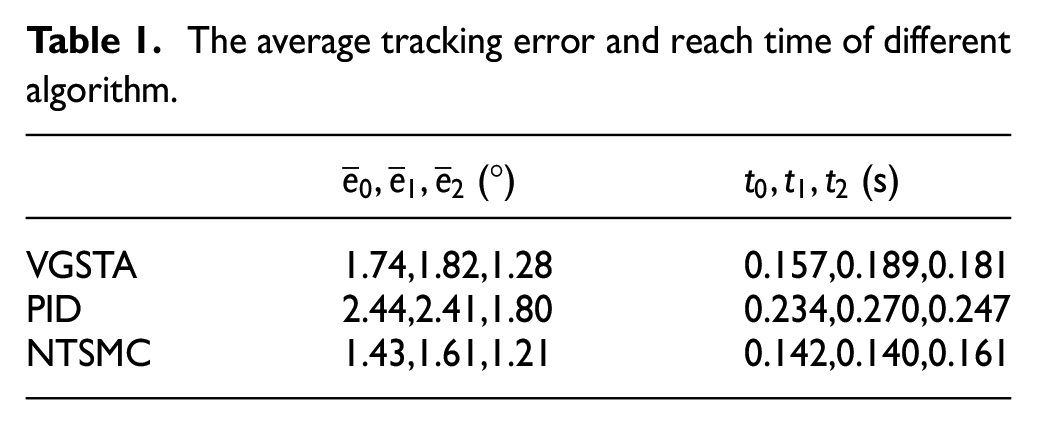
Where
Compared with the model-free controller, the VGSTA controller can track reference trajectory more accurately and fast response. It also reduces the cost of the identification compared with the mode-based controller (NTSMC) by making trade-off in some dynamic performance.
Discussion of the experiment result
To sum up, in this experiment part, the VGSTA-based controller has the explicit parameter to tuning its dynamic performance, having the advantage of the identification cost, and can realize the fast deployment of the rapid prototyping 3D-printed manipulator in a certain dynamic performance.
However, manipulator parameters used in the experiment are estimated by joint and rod mass, and unknown disturbance which will lead the parameter errors in the manipulator model. Moreover, there is still a lot of room for improvement in the design of linear sliding surfaces, such as terminal sliding surface.
Thus, in our future work, our work will focus on handling the uncertainty of the model error and introduce the other sliding surface to improve our manipulator performance.
Conclusion
In this paper, a VGSTA-based controller is proposed for the rapid deployment of the prototyping manipulator. This controller can reduce the identification cost and realize rapid deployment by the simplified inverse dynamic part and the VGSTA part to compensate for the unmodeled dynamic model. The inverse dynamic part can be obtained easily through the manipulator’s physical parameter, compared with the PID and NTSMC which are widely used in the rapid prototyping manipulator, the new controller has the advantage of high dynamic performance and the tuning parameter has a certain physical meaning which can easily to tune the dynamic performance to meet the user’s requirements. The above conclusion has been validated in a 3D-printed manipulator experiment, and its rapid deployment performance has been identified on the basis of experimental tests. In our future studies, the adaptive law29,30 and fuzzy logic systems approximation technique 38 will be further combined with the VGSTA controller to handle the uncertainty of the offline identification and further improve the robustness of the VGSTA.
Footnotes
Appendix 1
Manipulator dynamic model parameter:
Appendix 2
The positive definiteness of the matrix
The positive definite matrix
where
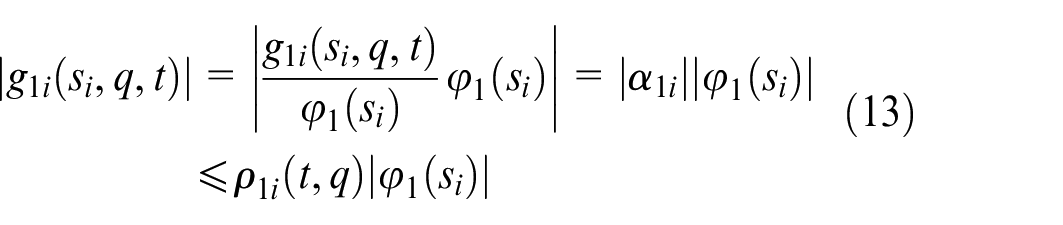
Then, based on inequality in (13), (14) and positive constant parameters
By applying define of
Analogously, based on inequality in (13) and (14) and positive constant parameters
To sum up, (A1) and (A2) are always held. Thus, the matrix
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Jiangsu Science and Technology Plan Program (BK20220263), Suzhou basic research pilot project(SSD2023018) CAS Project for Young Scientists in Basic Research (YSBR-067) National Key R&D Program of China (2021YFF0700503, 2022YFC2404201).
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.