
Abstract
This article proposes a family of spatial three translational and one rotational parallel mechanisms (PMs) for pick-and-place operation. Their features are one independent rotation of the mechanism with four identical limbs, which are provided by the four revolute joints on the moving platform. The rotational capability of the PMs has a range of at least 180°. This article focuses on the synthesis of the PMs and kinematics analysis of the 4-P(2-SS)R parallel mechanism. First, based on the Lie group theory, three parallelograms are used in designing the PMs. The limbs are listed and two types of three translational and one rotational PMs are synthesized. Then, a typical 4-P(2-SS)R PM is selected, the 6 × 6 Jacobian matrix and the 6 × 6 × 6 Hessian matrix of the mechanism are derived for solving the displacement, velocity, and acceleration of the mechanism. Finally, singularity configurations are disclosed from the 6 × 6 Jacobian matrix, and the workspace of the mechanism is provided to illustrate the high rotational capability.
Introduction
A parallel mechanism (PM) involves a moving platform connected to a fixed platform by several limbs. Compared to a serial mechanism, PM has some advantages, such as faster speed, higher accuracy, stiffness, and lower inertia. 1 Thus, PM has been successfully applied to various areas including motion simulators, 2 force/torque sensing, 3 parallel machine tools, 4 and especially high-speed pick-and-place robots.5,6
The spatial three translational and one rotational (3T1R) PM is also called Schönflies-motion PM. 7 Some methods used for type synthesis of Schönflies-motion PMs can be mainly divided into two categories: the methods based on the screw theory (Huang and Li,8,9 Kong and Gosselin, 10 Fang and Tsai, 11 and Carricato 12 ) and the methods based on the Lie group theory (Hervé, 13 Lee and Hervé, 14 Li and Hervé, 15 and Angeles 16 ). Besides, Gogu17,18 proposed a type synthesis approach of full-isotropic Schönflies-motion PMs through linear transformation of the Jacobian matrix. Yang et al. 19 studied the topological design of PM based on the position and orientation characteristics. Xie et al. 20 discovered some Schönflies-motion PMs using the Grassmann line geometry. Furthermore, several types of the Schönflies-motion PMs have been proposed (H4, 21 Par4, 22 I4, 23 SCARA, 24 4-UPU, 9 4-RRRRR, 10 Quadrupteron, 25 and Isoglide-4 17 PMs). Here, R, P, S, and U represent revolute, prismatic, spherical, and universal joints, respectively. However, the rotational capabilities of most Schönflies-motion PMs have a limited range of less than 90°.
In addition to the aforementioned works, many families of Schönflies-motion PMs have been proposed. Company et al. 26 synthesized an H4 robot family for high-speed handling and machining. Due to the interference among the moving platform and four limbs, the rotational capabilities cannot reach a range of 180°. Li et al. 27 synthesized Schönflies-motion PMs based on the Lie group theory. The PMs have four identical limbs, and each limb is a serial connection of four 1-degree-of-freedom (1-DoF) joints without redundant DoF. Similarly, the rotational capabilities of the PMs are limited within ±30°. Salgado et al. 28 presented a class of Schönflies-motion PMs with four identical limbs using the theory of Lie group. Each limb is a serial connection of five 1-DoF joints. The rotational capabilities of the mechanisms can reach ±90°. However, the parallelogram structure used in the PMs is composed of four links connected end to end by four R joints, and there are no other parallelogram structures. Based on these mechanisms, Xie et al. 29 proposed the X4 PM, which is composed of four R(2-SS)R limbs and a simple platform. The rotational capability of the X4 PM is in a range of at least 180°.
As such, we present the design of a new family of Schönflies-motion PMs. The new family of PMs, similar to the X4 mechanism, have four identical limbs and a platform, and the platform has four revolute joints that provide one independent rotational output. This family of PMs have three main characteristics. First, they are symmetrical structures: each PM has four identical limbs in which the parallelogram structures may be used, which benefits manufacturing, cost, and reliability. Second, all actuators are fixed on the base, reducing the movable mass, and gaping between joints and heavy servomotors. Third, the rotational capability of the PMs reaches 180°.
This article is organized as follows. In section “Structural synthesis,” three parallelograms are analyzed in designing the PMs, the limbs are listed, and two types of 3T1R PMs are synthesized. In section “Kinematics analysis,” the 6 × 6 Jacobian matrix and the 6 × 6 × 6 Hessian matrix of the 4-P(2-SS)R mechanism are derived, and the kinematics are derived for solving the displacement, velocity, and acceleration of the 4-P(2-SS)R mechanism. In section “Singularity analysis,” the Jacobian matrix is used for the singularity analysis of the mechanism. In section “Workspace,” the workspace of the 4-P(2-SS)R mechanism is provided to illustrate the high rotational capability. In section “Simulation,” some concluding remarks are given.
Structural synthesis
Basic conceptions
Based on the Lie group theory,13,30 a set of six-dimensional (6D) motion of rigid bodies can be endowed with the algebraic structures of a group, forming a Lie group
For the purpose of industrial applications, three design considerations are added.
Each limb has only one actuator placed on the fixed platform. The fixed actuators contribute to accuracy, high stiffness, good dynamic responses because of the minimum number of joints, and reduced movable mass. That is to say, the mechanism has four identical limbs.
Two types of kinematic joints are used as the actuated joints, including the joint R and joint P. The kinematic joints have simple structure with a 1-DoF joints, which are easier to be controlled and implemented.
All limbs are arranged symmetrically to meet the requirements of kinematic isotropy.
As for the mechanism with four identical limbs, the output motion set can be written as

where {Li} is the motion of the limb i and {M} is the motion set of the moving platform.
Kinds of articulated moving platforms
As for the 3T1R PMs, the rotational DoF is relatively simple to design because only a single rotation is required. Similar to the X4 mechanism, the one independent rotational output of the mechanism that is provided by the four revolute joints on the moving platform is a notable feature of the mechanism. Generally, the Schönflies-motion PMs can be used to perform three independent translations and one rotation about the z-axis. In addition, rotation about the x- or the y-axis could also be considered. All R joints on the moving platform are able to generate one independent rotation parallel to u, v, and w, respectively. Their subgroups are {R(N, u)},{R(N, v)}, and {R(N, w)}, respectively. Three kinds of articulated moving platforms (AMPs) are shown in Figure 1.

Three kinds of articulated moving platforms.
To obtain large rotational angles around one independent axis, only R joints are used to construct the AMPs instead of using U and S joints, owing to the higher rotational range of the R joints. A notable feature for the APMs is one independent rotation that is provided by the four R joints, which can maximum reduce the interference between any two limbs. That is to say, after connecting appropriate limbs, the parallel arrangement of the four R joints can increase the rotational angle of the moving platform. In this article, we select the first kind of AMPs to synthesize the family of PMs, with rotation axes parallel to w. Similarly, the other two kinds of APMs can also be used to synthesize the family of PMs using the following method.
Parallelogram analysis
As for a PM, the parallelogram structures are usually used as the closed-loop structure in its limb to design the PMs, which provides an improved stiffness and a high rotational capability to the mechanism. 28 The PMs with the parallelogram structures include the Delta mechanism 31 and H4 mechanism family. 26 If the output motion set of a parallelogram structure is the same as that of the equivalent joints, the parallelogram structures can be replaced by the equivalent joints. Here, the parallelogram Pa, 4U, and 4S can be analyzed by the Lie group theory, and the equivalent forms are provided in Table 1.
The equivalent joint of closed-loop chains.
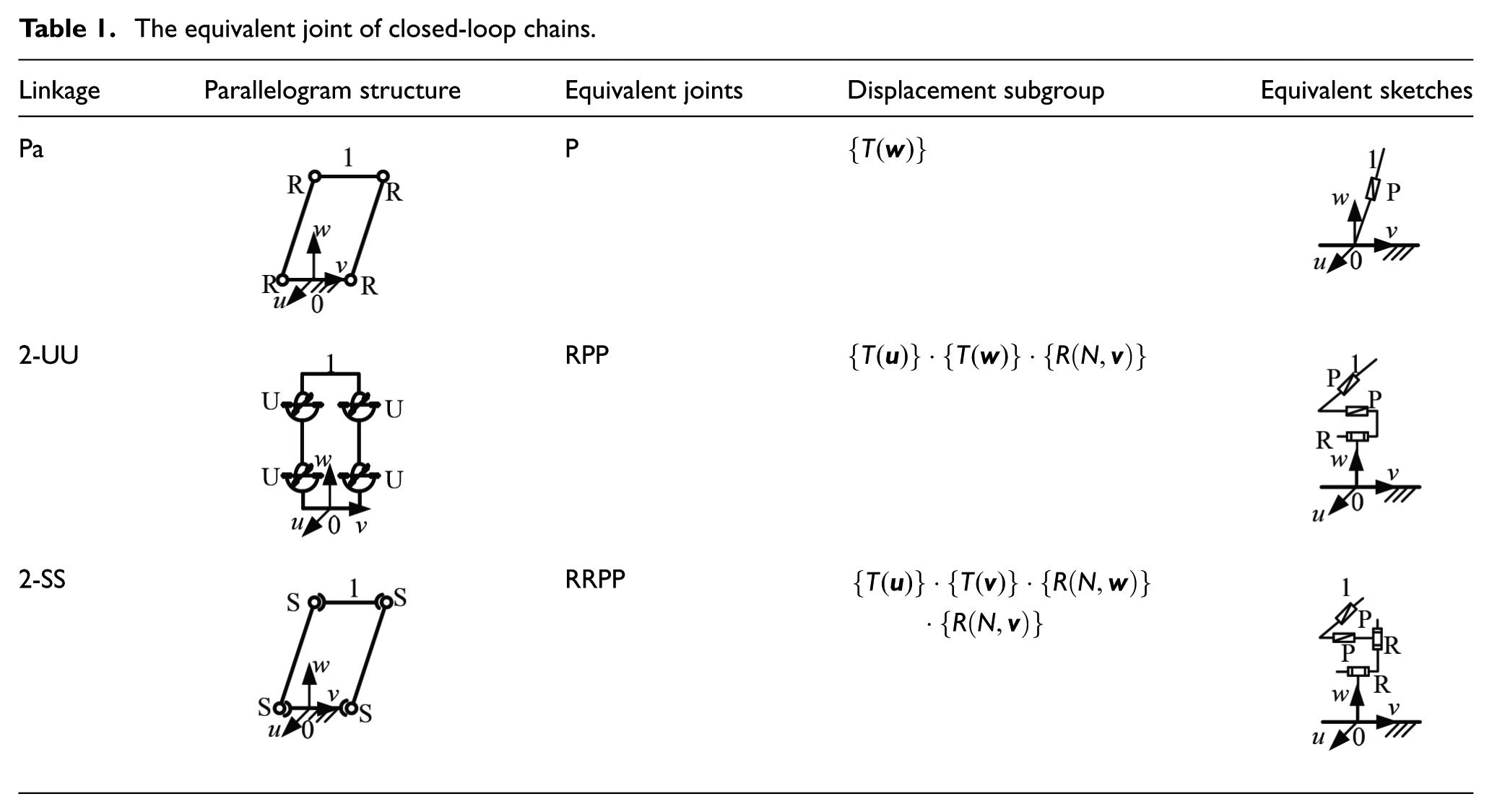
The parallelogram Pa consists of four R joints with parallel rotational axes. It produces circular translation. Therefore, the passive P joint is used to substitute the parallelogram without changing the mobility in the structural sketch. The motion of the parallelogram is a one-dimensional (1D) translational submanifold, which can be expressed as {T(
The parallelogram 4U consists of four U joints with parallel rotational axes. It produces a rotation and two translations. The kinematic chain PPR is used to substitute the parallelogram 4U without changing the mobility in the structural sketch. The motion of the parallelogram 4U involves one rotational submanifold and two translational submanifolds, which can be expressed as
The parallelogram 4S consists of four S joints. It produces two rotations and two translations. The kinematic chain RRPP is used to substitute the parallelogram 4S without changing the mobility in the structural sketch. The motion of the parallelogram 4S is two rotational submanifolds and two translational submanifolds, which can be expressed as
Limb structure
In order to create the Schönflies-motion PMs, each limb of the mechanism must be able to generate a Schönflies motion. Therefore, the possible motion types for a limb are the three expressions as follows

For the first case in equation (2), four possible combinations of four 1-DoF joints undergo the Schönflies motion as follows
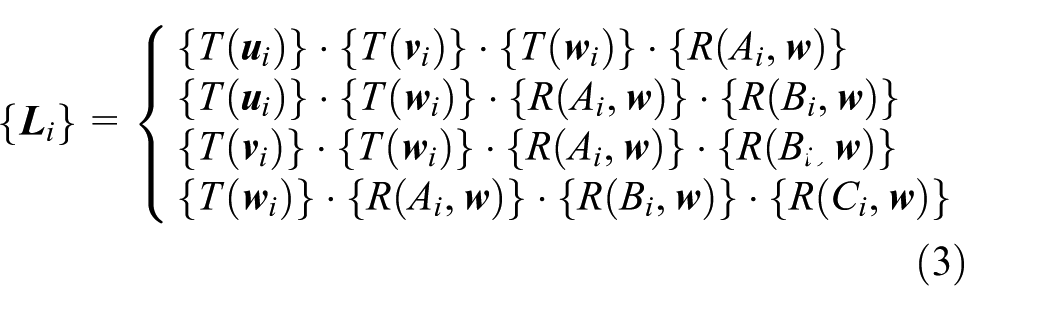
where
From equation (3), the axes of all R joints of the four limbs must be parallel.
For the second case in equation (2), five possible combinations of five 1-DoF joints undergo the Schönflies motion as follows

where
For the third case in equation (2), four possible combinations of six 1-DoF joints undergo the Schönflies motion as follows

where
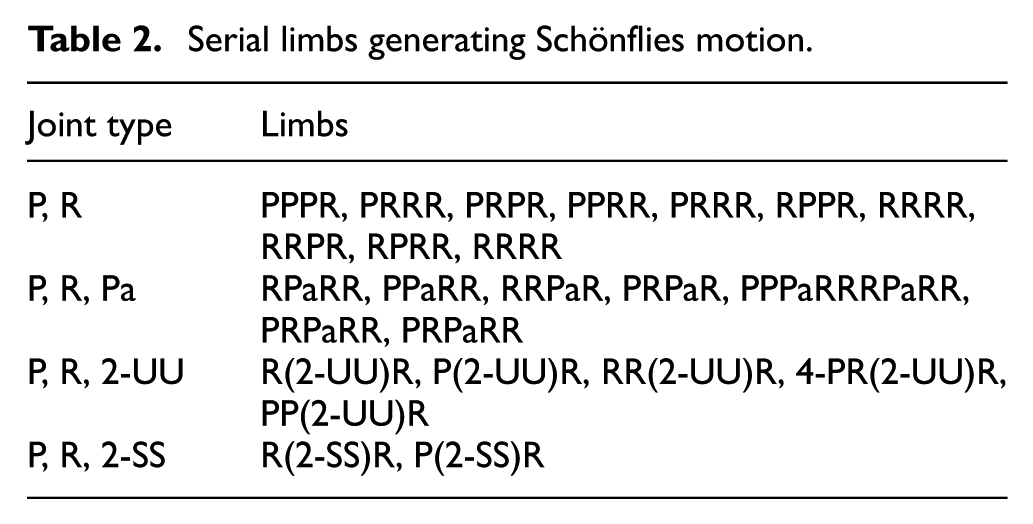
Based on the abovementioned analysis, serial limbs generating Schönflies motions are synthesized as shown in Table 2.
Serial limbs generating Schönflies motion.
Type synthesis of the mechanism
For the first case in equation (2), each limb undergoes the Schönflies motion. To obtain a fully PM with the Schönflies motion, arranging all the revolute joints with parallel rotational axes can achieve the desired mechanism.
For the second case in equation (2), the output motion can be obtained as

From equation (6), the intersection of the limb motions has no rotation around vector
For the third case in equation (2), the output motion can be obtained as

From equation (6), the intersection of the limb motions has no rotation around vector
Similarly, the other two kinds (3T1R(
Using the method mentioned above, the PMs with four limbs are synthesized as shown in Table 3.
PMs with four limbs.

Kinematics analysis
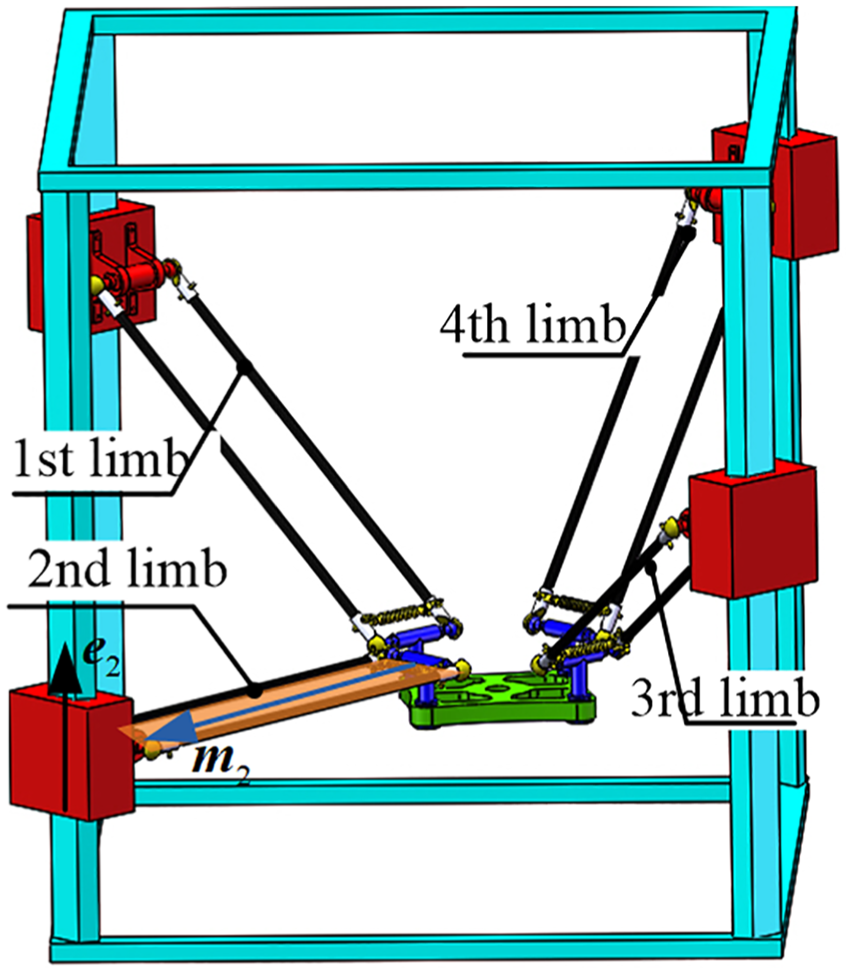
This section uses the 4-P(2-SS)R PM as an example to illustrate the kinematical properties of the new family. The mechanism consists of a moving platform connected to a fixed platform by four limbs. Each limb is composed of a P joint, parallelogram 4S, and an R joint in sequence, as shown in Figure 2.

Solid modeling of the 4-P(2-SS)R mechanism.
Inverse kinematics
To facilitate the analysis, the global frame O-XYZ and local frame p-xmymzm are attached to the fixed platform and moving platform at the centered point O and centered point p, respectively, as shown in Figure 3. Let the z-axis and Z-axis be perpendicular to the fixed platform, and the y-axis and Y-axis be parallel to
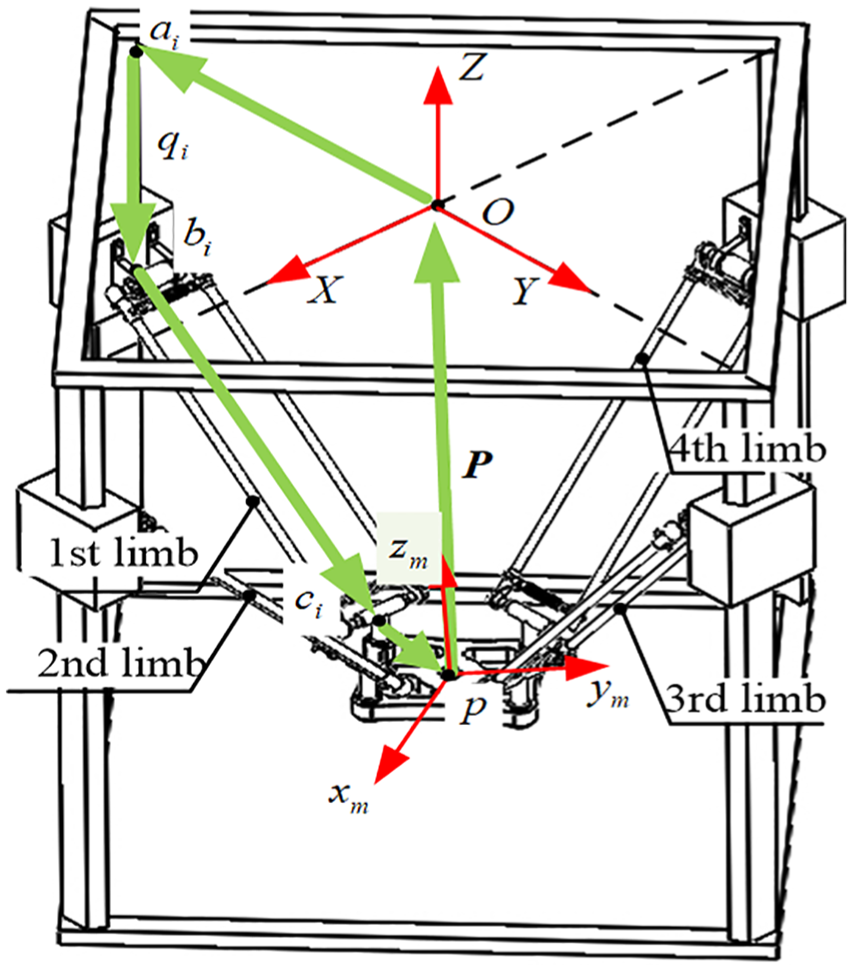
Kinematic model of the 4-P(2-SS)R mechanism.
In the global frame O-XYZ, let

The position vector

where
The vector

The closure of the ith limb is given by

Solving the above equations, the inverse kinematic solutions can be obtained as
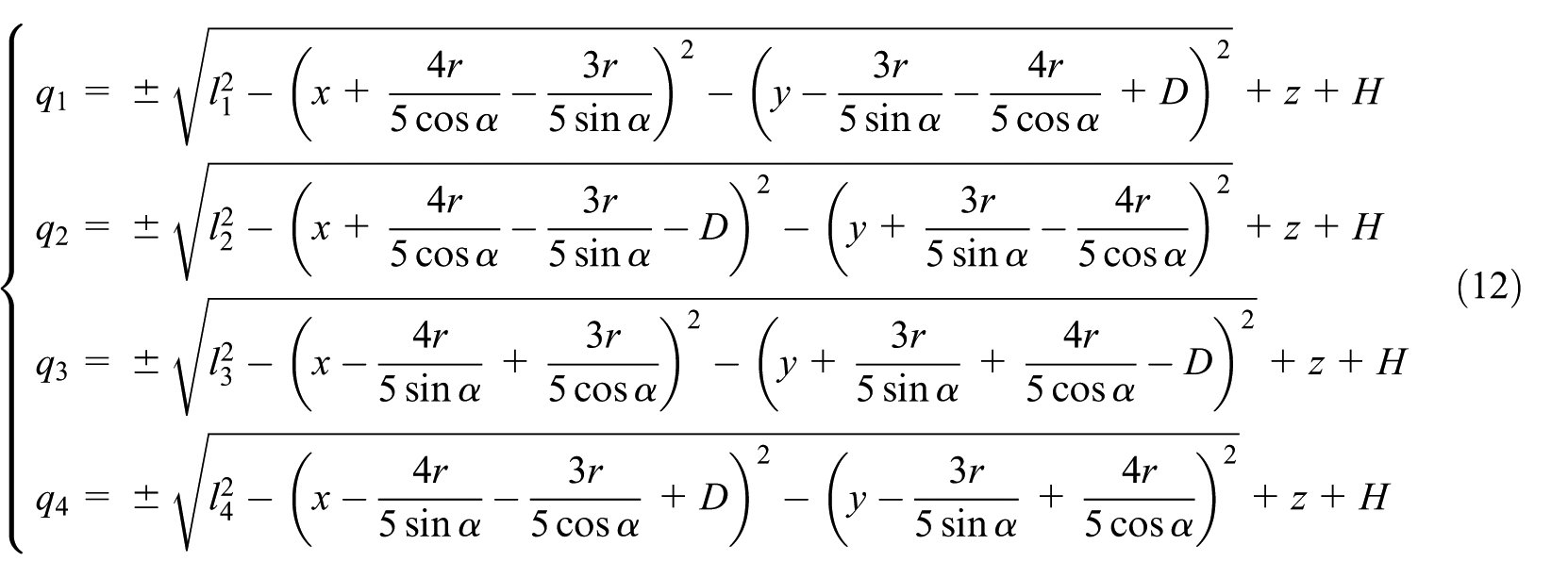
From equation (11), there are eight inverse kinematics solutions for a given pose of the mechanism. To obtain the inverse configuration, all signs “±” should be “+.”
Velocity analysis
The velocity and acceleration of point p are given by

Differentiating equation (8), the velocity

where
By dot-multiplying

From equations (14) and (15), the velocity

Furthermore, the driving velocities can be expressed as

where
Acceleration analysis
Differentiating equation (15), the acceleration

where

where
According to equations (18) and (19), the acceleration can be given by

where
The acceleration of point

where
Jacobian matrix and Hessian matrix
In order to derive the 6 × 6 Jacobian matrix and the 6 × 6 × 6 Hessian matrix, the poses of the constrained wrench have to be determined. As the moving platform could perform the 1-DoF rotation and 3-DoF translation, there are two constrained couples on the moving platform. The constrained couple of each limb can be determined using the geometrical approach.
32
Their unit direction vectors are
Because the constrained couple limits the movement of the moving platform, it does not provide any power to the moving platform. Thus, we can obtain

From equation (22), an augmented Jacobian matrix can be obtained as

From equations (23) and (17), the inverse and forward velocities of the mechanism can be solved as

where
Differentiating
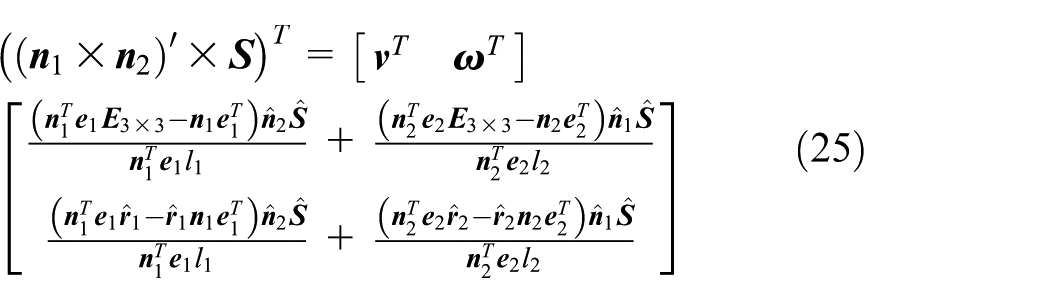
where
From equations (23) and (25), the Hessian matrix can be expressed as

where
The inverse and forward accelerations of the mechanism can be given by

where
Singularity analysis
In general, singularity occurs in a condition where there are infinity roots or not any root for equation (24). In this condition, the mechanism may instantaneously lose one or more DoFs or gain DoFs. This condition may occur with respect to Jacobian matrix
Singularity affected by velocity Jacobian matrix
Case 1:
In this case, the vector
Figure 4 shows the condition where the vector
The first type of singularity in case 1.
Case 2:
, rank
< 4
In this case, the rank of velocity Jacobian matrix can be simplified as
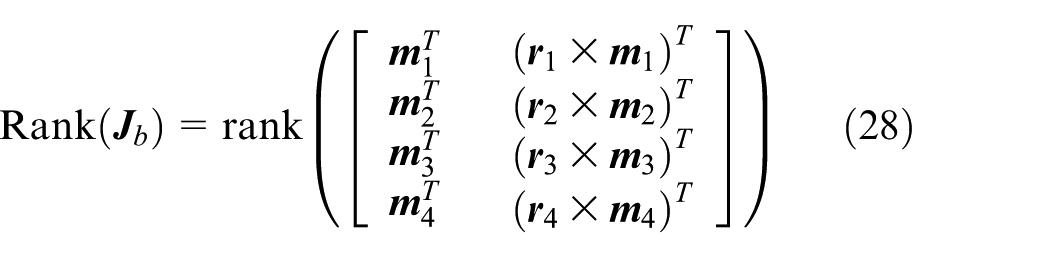
From equation (28), if a vector
Singularity affected by augmented Jacobian matrix
The constraint singularities occur when the limbs of a PM lose their ability to constrain the desired motion of the moving platform.
33
The linear dependency of
Case 1:
1. When
In this case,

The constraint singularity in case 1.
The rank deficiency happens as follows

2. When
In this case,
Case 2:
is parallel to
When
In this case,

The constraint singularity in case 2.
The rank deficiency happens as follows

When
In this case,
Case 3: cases 1 and 2 occur simultaneously
If cases 1 and 2 occur simultaneously, the rank deficiency happens as follows

Workspace
The reachable workspace is all positions that can be reached by point p of the moving platform in O-XYZ. Its boundary is simultaneously limited by geometric constraints of all joints, input ranges, and the physical interference.
By considering the constraints mentioned above, the constraint inequalities of the reachable workspace can be given by

In addition, the rotational angles

where
According to equations (32) and (33), the size and shape of the reachable workspace can be obtained by a numerical search in O-XYZ. If a point (x, y, z) satisfies equation (33), the point can be regarded as part of the reachable workspace. Then, by searching points in each X–Y section, a set of points is obtained. The 3D distribution of all these points forms the reachable workspace of the 4-P(2-SS)R mechanism. The related values of the geometrical parameters of the 4-P(2-SS)R mechanism are listed in Table 4.
Related geometrical parameters about the model of 4-P(2-SS)R mechanism.

Based on the numerical searching results from equations (32) and (33), the reachable workspace of the 4-P(SS)
2
R mechanism is shown in Figure 7. The range of the reachable workspace can be obtained as follows:

Workspace of the 4-P(2-SS)R mechanism: (a) 3D view and (b) top view.
Nevertheless, the abovementioned analysis does not consider interference that would restrict rotational movements. As shown in Figures 8(b) and (c), when

The bottom view of the 4-P(2-SS)R mechanism with three configurations: (a)
Simulation
In this section, to demonstrate the derived kinematics, trajectory tracking simulations of the 4-P(2-SS)R mechanism are performed by using MATLAB software. Considering the interference and workspace of the mechanism, the following desired trajectory is chosen as

where
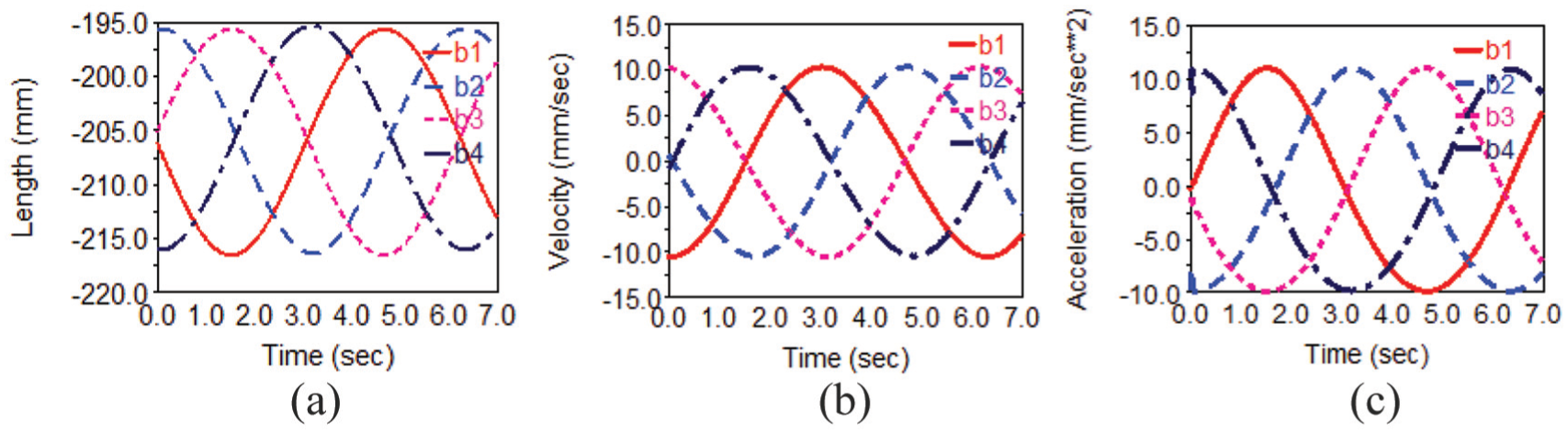
According to relevant equations of the 4-P(2-SS)R mechanism, simulations are implemented for solving the position, velocity, and acceleration of the 4-P(2-SS)R mechanism. The position, velocity, and acceleration of four actuators are obtained as shown in Figure 9(a)–(c).

The theoretical results of the mechanism: (a) the position, (b) the velocity, and (c) the acceleration.
In order to verify the theoretical results, the virtual prototype of the 4-P(2-SS)R PM is imported into Adams software. Under the same conditions as the previous analytical model, the kinematic simulation of the 4-P(2-SS)R PM is performed by using Adams software, as shown in Figure 10. Upon comparing the results shown in Figures 9 and 10, the variation tendencies of the curves obtained by the two programs are identical, which verifies the correctness of the position, velocity, and acceleration models.
The simulation results of the mechanism: (a) the position, (b) the velocity, and (c) the acceleration.
Conclusion
This article focused on the proposal of a family of spatial 3T1R PMs for pick-and-place operation. Their features include one independent rotation of the mechanism with four identical limbs, provided by the four revolute joints on the moving platform, which can be used to achieve larger rotational angles. Three APMs were designed to guarantee the high rotational capability for the PMs. Three parallelogram structures were analyzed in designing the PMs, the limbs are analyzed, and two types of 3T1R PMs were synthesized.
To illustrate the kinematical performances and rotational capability of the mechanisms, a typical 4-P(2-SS)R PM was selected. According to the workspace analysis and the rotational capability analyses, the rotational capability of the proposed PM was determined to have a range of at least 180°. In addition, the 6 × 6 Jacobian matrix and the 6 × 6 × 6 Hessian matrix of the mechanism were derived, providing a foundation for its structure optimization, manufacturing, control, and applications.
Footnotes
Handling Editor: Davood Younesian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant No. 61473112).