
Abstract
A mine bolter is a fast, safe and economical support equipment, in which the manipulator is the key component for its parallel operation. In this study, the kinematics of mine bolter manipulator is selected as the research object. Aiming at the problem of the dynamic system response estimation of positive solution matrix with uncertain parameters, an interval estimation analysis method based on Chebyshev polynomial is proposed. The response envelope interval of the forward kinematics solution matrix of the manipulator with uncertain parameters is investigated using three types of surrogate models: scanning method, tensor product and collocation method. The feasibility and efficiency of the proposed algorithm are proved by a prototype test. The study of response interval with uncertain parameters has become a new method for predicting the spatial trajectory tracking and location of the manipulator to ensure that its prediction error is minimal.
Introduction
To meet the needs of coal enterprises for bolt support speed, operation safety, people reduction and increased efficiency, research and development of a mine bolter were conducted to track the international advanced level of support equipment. Developing the equipment can reduce the labour intensity of operators, improve the working environment and greatly increase the support efficiency and safety factor.
A mine bolter can realize the automatic support of roof and sidewall in rows. Two manipulators are used to achieve the spatial positioning of the automatic drilling frame. In this research, the right manipulator of a mine bolter was selected as the research object. On the basis of screw theory, the mathematical model of the space position and attitude of the manipulator was established, and its forward solution expression was solved. To predict and evaluate the errors of the manipulator during motion at the design stage, the reasons affecting the high precision positioning of the manipulator end were analysed. The main reasons included the manufacturing errors of mechanical parts and components, the assembly and installation errors of the entire machine, the deformation of the manipulator caused by temperature and force effects, transmission mechanism errors and control system errors (e.g. interpolation, servo-system and detection element errors). On the basis of the error sources, numerous references propose the methods of error analysis and reduction. Li 1 used differential method2–5 to derive the differential motion formula of the object coordinate system. They applied matrix and perturbation methods to establish the static pose error model of robots, but no error compensation model was proposed. P Guo 6 utilized the differential method to study the variation of pose errors. On the basis of the characteristics of the input parameters of robots, the angle of the moving joint was set as the compensation link, and the error compensation model was established. The positioning accuracy was relatively improved. However, the shortcoming of large calculations was not overcome. In addition, the calculation process was cumbersome and complex, thereby reducing calculation efficiency and accuracy. To improve computational efficiency, L Wang et al. 7 applied the extreme learning machine algorithm to the mathematical model of the research object. They used the spatial network sampling method to analyse the variation law of errors. Thus, the error compensation model and variation law were obtained. J Mei et al. 8 adopted the loop increment method to model the error of the research object. The method improved the identification efficiency of the error model and the rapidity of location. These proposed methods aim to analyse and suggest solutions to the motion errors of mechanisms. However, errors of most research objects are not limited to the motion of mechanisms. Errors caused by the original machining assembly and variable load on the space trajectory tracking and positioning of the manipulator should also be considered. Y Zhao et al. 9 considered the influence coefficient and virtual displacement principle of parallel robots. A new general method of static error modelling and analysis was used to investigate the independent influence of various original machining and assembly error sources on the position and posture of the end of parallel robots. X Hou et al. 10 applied simulation and experiment methods to simulate the study object in ADAMS environment. They analysed the dynamic errors caused by variable load, improved the positioning accuracy of robots and designed and developed an error compensation interface for human–computer interaction. S Wan et al. 11 examined the formation errors from the perspective of information theory, which provides a new idea for formation errors that may occur in multi-robot systems. The abovementioned references have contributed to the analysis of robot motion errors, but they were all aimed at a certain error source and thus had great limitations. The research object is also focused on the model of determining parameters for calculation and analysis. A large gap exists between the system response obtained by the traditional deterministic model and the test results. The working environment of the mine bolter is poor, and the positioning accuracy must be high. In addition, the errors caused by manufacturing, assembly and the physical parameters affected by environmental factors can produce several uncertain factors. Uncertain parameters can affect the spatial trajectory tracking and final positioning of the end of the mine bolter manipulators. Small uncertain parameters greatly affect the response of non-linear motion systems.12–14 Therefore, analysing the kinematic errors of manipulators with uncertain parameters in this study is necessary. On the basis of the kinematics mathematical model of the manipulator, this research comprehensively considers error sources, including mechanism movement, production and assembly and variable load. Thus, the high precision and fast positioning of manipulators are obtained. An interval algorithm is proposed to analyse the kinematics of the mine bolter manipulator with uncertain parameters and estimate errors.
Interval algorithm has also become an important tool in the field of uncertainty analysis.15–18 Interval method is a vital supplement to the probability method because it only requires the upper and lower bound information of uncertain parameters. The method requires neither probability distribution information nor the fuzzy membership function of uncertain parameters. Common interval algorithms include sampling 19 and fast modelling methods. Fast modelling method is also called proxy model method, which includes polynomial proxy model, mobile least squares proxy model, radial basis function proxy model, Gauss process (or kriging) proxy model, neural network and support vector regression. In interval algorithm research, numerous proxy models20–24 have been proposed to construct interval algorithms. Agent model, also known as approximation model, is an important tool in approximation modelling. As an approximate replacement model of complex systems, agent model can reduce the excessive occupation of resources, simplify the complex process and effectively promote the implementation of rapid calculation, design optimization and real-time display in various engineering fields. In the implementation process of interval algorithms, an appropriate agent model can assist the implementation of interval analysis and improve the generality and robustness of interval algorithms. To minimize random errors, the sample points should cover the entire design area. 20 The construction of proxy models depends on Taylor, Fourier and Chebyshev sequences. The Taylor series and perturbation theory are developed by Z Qiu et al.25,26 for small-scale uncertainties only. By contrast, the interval method based on Fourier sequence 27 and the polynomial of trigonometric function is a general non-embedded method, but its sample demand increases with the uncertain variable dimension and approximate order. The Chebyshev polynomial has a good orthogonal property, and the power function term in the expansion formula can easily calculate the variable fractional differential. The Chebyshev polynomial has the basis of function approximation and the condition of forming operator matrix. 28 When using a polynomial to approximate an unknown function, the Chebyshev polynomial has good convergence because it is the eigensolution of the Sturm–Liouville problem and can be used to expand any function in finite interval. 29 In addition, the Chebyshev polynomial has high approximation accuracy in approximation theory. A Chebyshev interval expansion function based on Chebyshev series expansion is proposed in this study. The Chebyshev expansion function can more effectively compress the wrapping effect of interval algorithm than the traditional Taylor expansion function, especially when calculating the variation interval of non-monotone functions. The Chebyshev interval expansion function only needs to calculate the output of the original function at the interpolation point. This requirement is easier to achieve than that of calculating the derivative of the original function when the Taylor interval expansion function is established. On the basis of Chebyshev expansion function theory, our study performs the uncertainty error analysis of the kinematics of mine bolter manipulators by combining scanning method (SAS), collocation method (CCM) and tensor product (CTP) proxy models. Response envelope interval and calculation time under different proxy models are also compared. The response study with uncertain interval parameters is used as a new method for predicting the end trajectory interval of the manipulator. This method ensures that the error of the predicted kinematics response is minimal and improves the accuracy of the end positioning of the manipulator. Finally, a good uncertainty interval algorithm can provide theoretical support for the kinematic error analysis of the two manipulators of the mine bolter, including its multi-manipulators, in the future. The high-precision operation of the mine bolter manipulator also expands the breadth and depth of applying the interval algorithm theoretical model.
Mathematical modelling of manipulator kinematics
On the basis of screw theory,30–34 the kinematics analysis and modelling of the mine bolter manipulator are investigated in this research. The specific method is used to establish the calculation formula of forward kinematics in accordance with the D-H coordinates and parameters of the right manipulator.
Screw theory
The rigid body transformation can be expressed by Euclidean group

In formula (1),
If a rigid body rotates at a uniform speed around axis

where
Unit matrix I is defined as

Chasles proved that rigid body attitude transformation

where
On the basis of formulas (3) and (4), we can obtain the following

Let

For a given robot, let its degree of freedom be n, its joint variable be
For each joint i, a corresponding motion screw

Kinematic model based on screw theory
The right manipulator of the mine bolter is the research object. The positive expression of the space position and posture of the manipulator are derived. Figure 1 shows the structure diagram of the right manipulator of the mine bolter, and Figure 2 presents its coordinate system definition. The manipulator has six degrees of freedom, including rotating
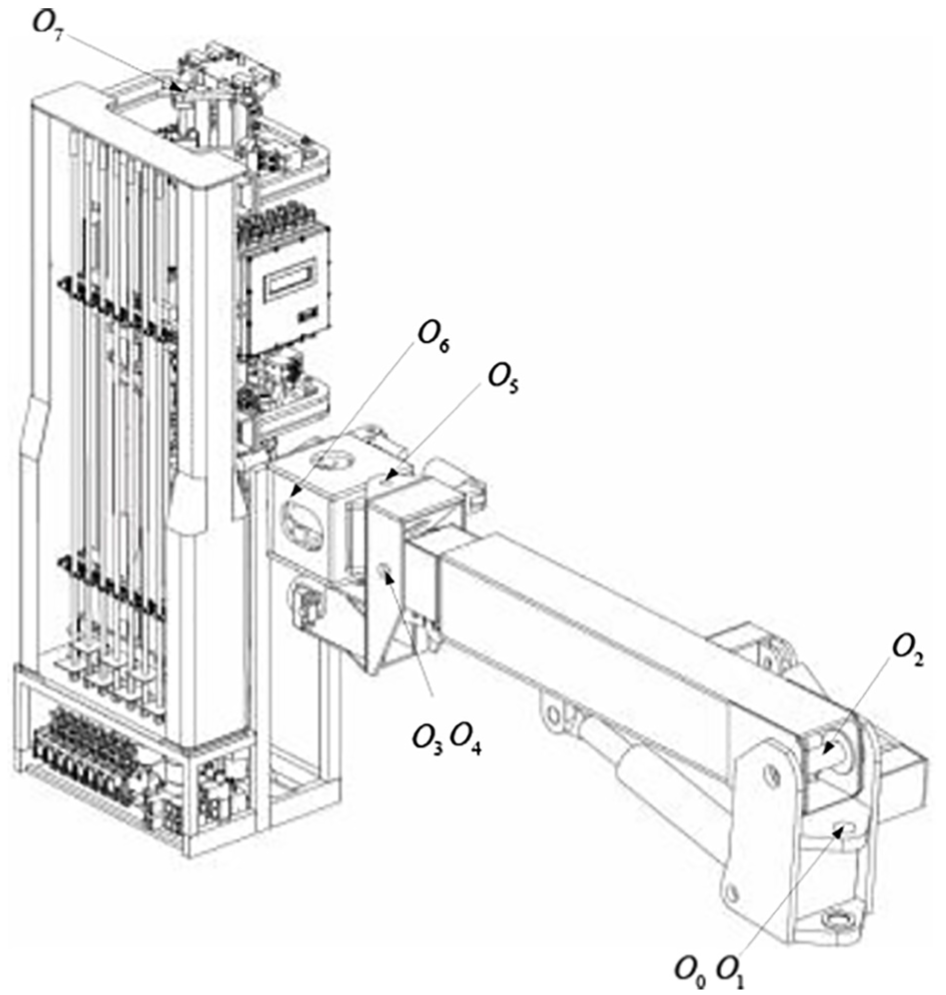
Structural diagram of manipulator.

Coordinate diagram of manipulator.
Figure 1 exhibits the origin of each coordinate system. The positions of
The positive solution of space pose matrix can be obtained by establishing a transformation matrix among coordinate systems and a position matrix of the origin coordinate system as shown in formula (8)

Among them, the manipulator has six degrees of freedom, including the following:
Chebyshev interval function algorithms
The current focus of interval method research is how to control the expansion of the result response interval caused by the wrapping effect (i.e. overestimation phenomenon). In interval algorithm research, numerous proxy models20–23,36 have been proposed to construct interval algorithms. The previous Taylor expansion function method involves the first- and second-order differentials of independent variables with respect to uncertain parameters. However, the derivation process is complex. For the problems of large uncertain ranges or strong non-linear systems, JL Wu et al. 37 proposed the Chebyshev expansion function.
The continuous function

where
The Chebyshev expansion function of original function

where
The basic concepts, models and general solutions of interval analysis are mature. In this study, the input–output proxy models of CCM,38–40 SAS 41 and CTP 42 are constructed on the basis of the characteristics of Chebyshev polynomials. The response envelope interval of the forward kinematics solution matrix of the manipulator with uncertain parameters is analysed using three agent models. Finally, an interval algorithm with high efficiency and accuracy is obtained.
H Peng et al.
43
suggested the necessity of establishing a proxy model and the advantages of Chebyshev series. After defining that accuracy depends on the elected approximate model, three methods are obtained by selecting the series as the proxy model. The construction process of the proxy model is independent of the design of the interval algorithm. The proxy model is used to construct the functional relationship between output and input variables. Although the construction process of different agent models is different, the final form is composed of relatively fixed basis functions and correlation coefficients containing input variables. By using

In the model,

Coefficient

For convenience, s equally represents the component index of input variables. The integral point (also the zero of the Chebyshev polynomial) is as follows


The provided proxy model shows that the display expression can be expressed in the form of coefficients and input variables (or input variable correlation basis functions). When the agent model is constructed, the interval boundaries of input

By using the Chebyshev sequence approximation to implement the interval algorithm, the interval expansion is as follows

Or

On the basis of the expansion functions in formulas (16) and (18), the intervals of output variables can be obtained through the interval operations defined in the four-rule operation of intervals.
Algorithm flow
Initializing algorithm parameters. The interval boundary
Sampling. The sample is mapped from original space
ODE equation solution. The dynamic system equation corresponding to each sample in the sample set must be solved by the ODE numerical method. If the ODE calculation is 0 ∼ t, and discrete
Constructing the design matrix. The exponential vector set
Coefficient estimation. On the basis of the known design matrix
Model selection. The optimal model is obtained after the coefficient path is determined.
Interval analysis. After establishing the model, the Chebyshev interval expansion function can be obtained. Finally, the upper and lower bounds of the expansion function output can be calculated.
Figure 3 shows the flow chart of the algorithm. The process of solving kinematics response is similar to a ‘black box’ model. Only by transforming uncertain parameters into interpolation point data of the Chebyshev expansion function can the corresponding time-varying response data be obtained. The Chebyshev expansion function is constructed by using the Chebyshev polynomial coefficients obtained from the process, and the dynamic response interval is acquired. Among them, h is the iteration step,
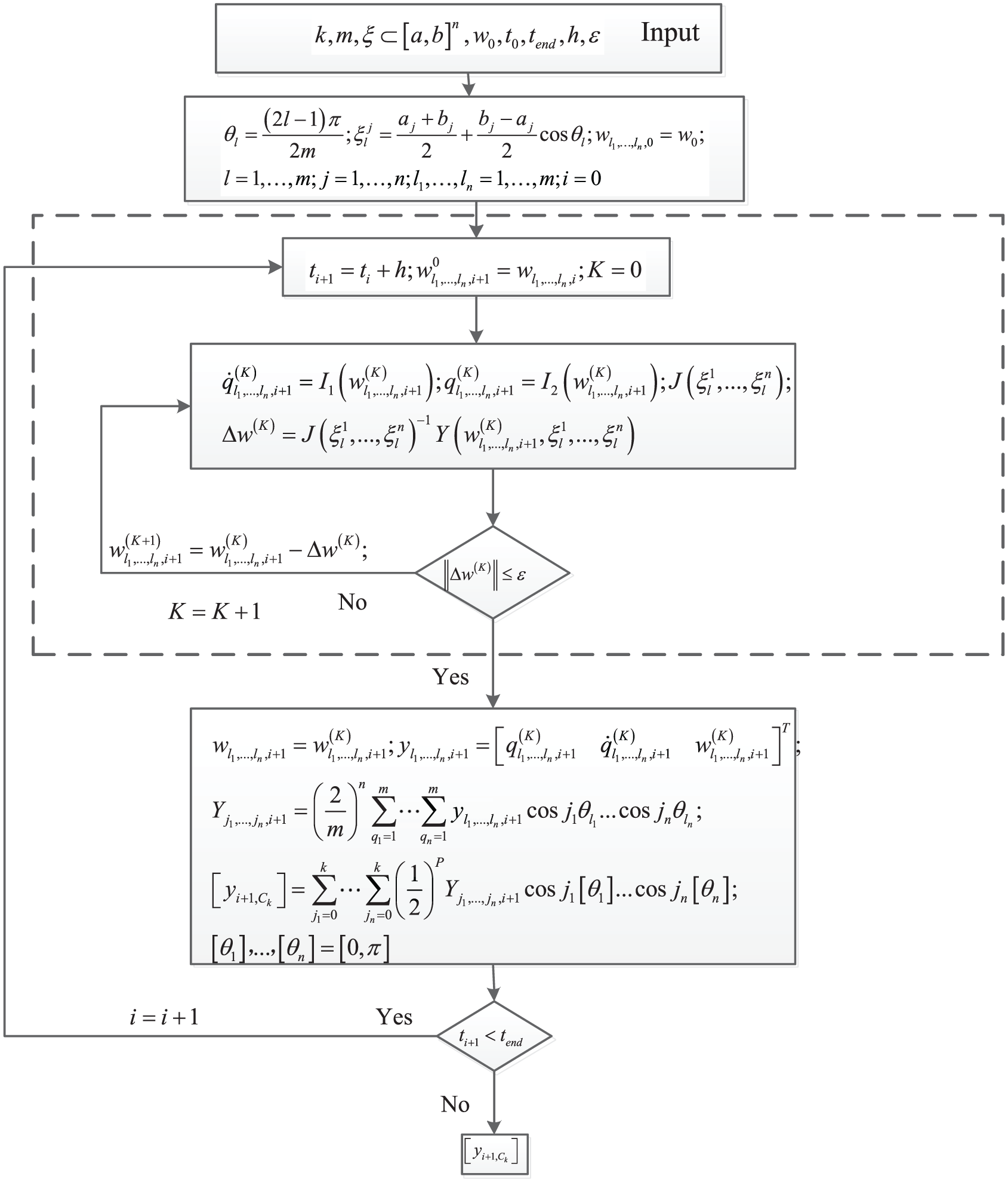
The Chebyshev interval expansion function is used to solve the algorithm flow of kinematics system with interval uncertain parameters.
Uncertainty analysis of interval parameters of manipulator system
Figure 1 illustrates that the dynamic matrix nonlinearity of the right manipulator of a mine bolter is high. The attitude of the manipulator supporting the roof vertically upwards is selected as the analysis condition, that is, the coordinate value of the end positioning is R11 (3400, −2143,2894). Table 1 presents the corresponding joint angles and rod lengths. The positive solution expression of the manipulator matrix is shown in formula (1).
A list of parameters of the manipulator.

In the matrix,
The interval uncertainty of the positive solution of the manipulator.

The calculation time of the matrix is 10 s, and the discrete time step of the response output of the dynamic system is 1000. In the CTP and CCM methods, the order of calculation is 3, and the truncation order is 2. The interval of each uncertain parameter is uniformly selected at 16 time points. The order
Comparison of CPU time of positive solution of manipulator.

SAS: scanning method; CPU: central processor; CTP: tensor product; CCM: collocation method.
Table 3 confirms that in the statistics of computing resource consumption, CCM needs the least CPU time, whereas CTP needs the highest CPU time. In addition, SAS and CCM have more advantages in CPU time consumption than CTP. In comparison with the original calculation method, the CPU time consumption of SAS is reduced by 76.32% (Figure 4) and that of CTP by 17.50% (Figure 5).

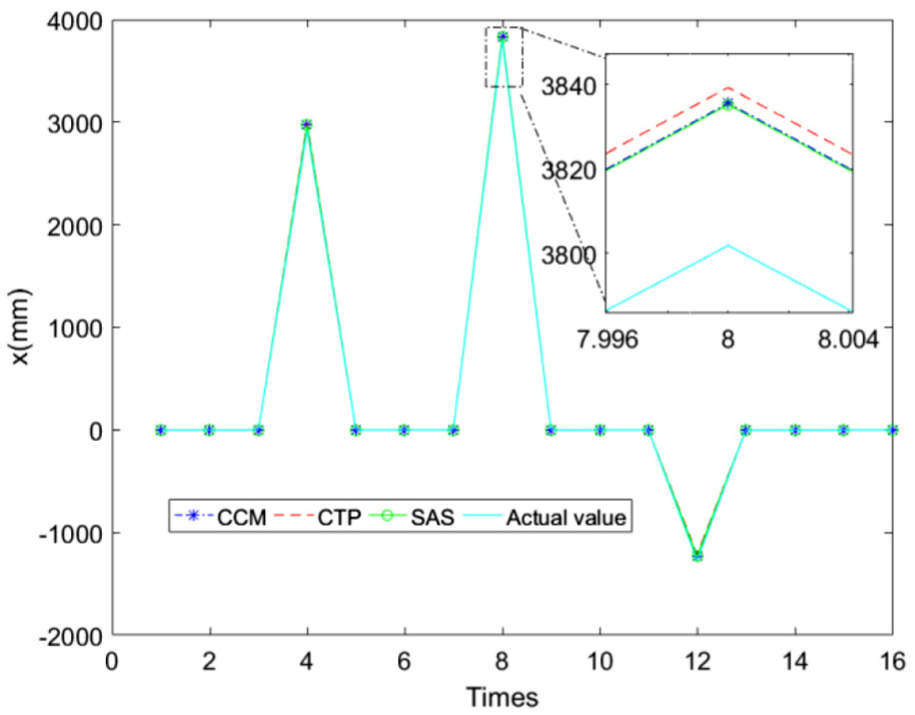
Comparison between the estimated value of the upper boundary of the three interval algorithms and the theoretical upper boundary value.
Comparison between the estimated value of the lower boundary of the three interval algorithms and the theoretical lower boundary value.
Figures 4 and 5 illustrate that the three interval methods can obtain good interval envelope results. The results of CCM and SAS are close to the theoretical values. Both methods can produce the least conservative estimations in the error estimation, with a small estimation range. The CTP method can obtain a wide range of estimations, but it takes a long time. In displacement calculation, the accuracy of SAS and CCM can maintain the same level, but the CPU time of CCM is short. This finding highlights the advantages of CCM in less conservative estimation and high computational efficiency. Tables 4 and 5 further show the comparison of numerical results at certain time points. The approximation accuracy of the proxy model based on polynomial only depends on the sampling points but is independent of the regression basis function vector. The zero of the Chebyshev polynomial is used as a sampling point to construct a high-order polynomial regression model. SAS, CCM and CTP can locally obtain a good conservative estimation. By comparison, CCM has the least computation time, and its estimated value is close to the theoretical values. On the contrary, CTP can only obtain good estimation from local values, and its CPU takes the longest time. The following are the main reasons: (1) The sampling points of CTP are interpolation points formed by the CTP of 1D polynomial zeros, whereas those of CCM are selected from these interpolation points. (2) CTP uses the highest polynomial as the regression model, whereas the least polynomial is utilized to construct the regression model. The reason is that CTP converges fast enough only when the number of its sampling points is large and when that of CCM sampling points is small.
Comparison of the theoretical value of the upper boundary and three upper bounds estimates under the positive solution matrix.

SAS: scanning method; CTP: tensor product; CCM: collocation method.
Comparison of the theoretical value of the lower boundary and three lower bounds estimates under the positive solution matrix.

SAS: scanning method; CTP: tensor product; CCM: collocation method.
Test verification
Experimental research on uncertainties can investigate the kinematics characteristics of the manipulator system. Therefore, conducting such research can solve practical engineering problems.
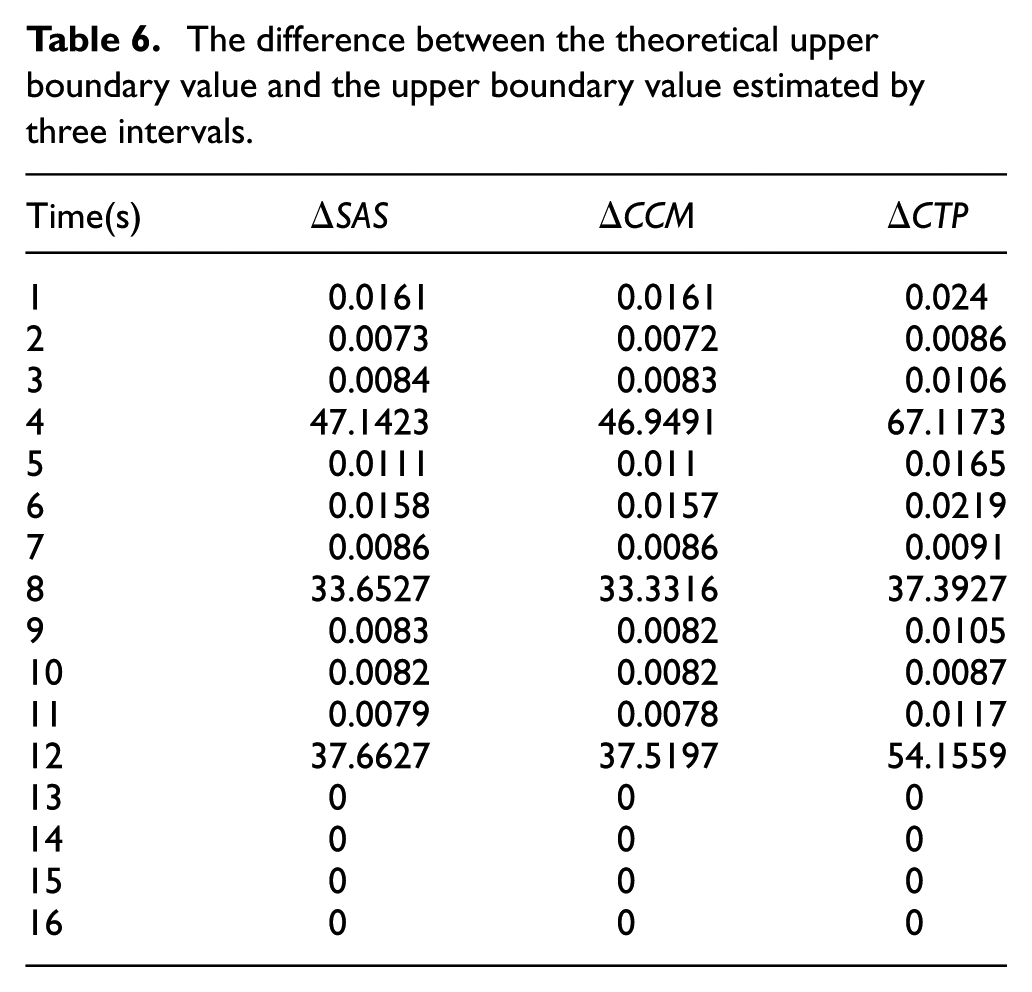
Figure 6 shows that experiments are performed on the newly developed manipulator to achieve the same trajectory tracking and end-point positioning. Such experiments verify the validity and efficiency of the interval method investigated in this research. Three interval algorithms are used individually to test the kinematics of the mine bolter manipulator with uncertain parameters. The difference between the positive solution of the manipulator matrix and the upper and lower bounds estimated by three interval algorithms is obtained, as shown in Tables 6 and 7.

Test prototype of mechanical arm interval algorithm for manipulator.
The difference between the theoretical upper boundary value and the upper boundary value estimated by three intervals.
The difference between the theoretical lower boundary value and the lower boundary value estimated by three intervals.

Sixteen array time points are used to highlight the difference among the three interval methods and theoretical values. The minimum error is also obtained. Tables 6 and 7 show that the results of the compact package validate the accuracy and validity of the proposed algorithm. In most time discrete points, SAS and CCM have the smallest conservative estimations, and CTP method can obtain good local estimations.
Conclusion
On the basis of the Chebyshev expansion function algorithm, the response envelope interval of the forward kinematics solution matrix of the manipulator with uncertain parameters is investigated by establishing three proxy models: SAS, CTP and CCM. Through the research and comparison of three interval algorithms, this method can effectively reduce the error of the predicted value of kinematic response. The response interval of the kinematic system of the manipulator can also be quickly and steadily obtained. The study concludes with the following points.
On the basis of screw theory, the mathematical model of the forward kinematics solution of mine bolter manipulator is established. In accordance with the process of the Chebyshev interval algorithm and the range of uncertain parameters, three interval algorithms based on interval mathematics and Chebyshev theory are applied to the kinematics analysis of the manipulator. The change range of the positive solution matrix value of the mine bolter manipulator is solved. Interval algorithm has more important engineering practical value than deterministic method.
In the CPU consumption statistics of computing resources, the three interval algorithms have less value than the original method. In comparison with the original method, SAS, CTP and CCM reduce the CPU time consumption by 76.32%, 17.50% and 97.65%, respectively.
By comparing the results and theoretical values of the upper and lower boundaries of the three interval proxy models, our results reveal that the CCM and SAS are close to the theoretical values and can produce the least conservative approximations in error estimation. The CCM proxy model consumes the least CPU time, and the calculated value is close to the theoretical values. Therefore, the CCM proxy model is the most ideal among the three proxy models.
Finally, experiments indicate that the interval algorithm is effective and feasible. However, the experimental research involves numerous uncertain and uncontrollable factors. Thus, realizing the characteristic analysis of the system kinematics with uncertain parameters is difficult. Given this problem, follow-up work must further investigate and discuss uncertain problems to obtain further experimental results.
The study of the interval boundaries of kinematic system responses with uncertain parameters has become a new method for predicting the trajectory intervals and terminal positioning errors of manipulators. This approach has provided a theoretical support for the analysis of the kinematic errors of the two manipulators of mine bolter, including its multi-manipulators, in the future. The high-precision operation of manipulators has also expanded the breadth and depth of applying the interval algorithm theoretical model.
Supplemental Material
AEM-18-2686-Supplement2019-1-17 – Supplemental material for Kinematics uncertainty analysis of mine bolter manipulator based on Chebyshev interval algorithms
Supplemental material, AEM-18-2686-Supplement2019-1-17 for Kinematics uncertainty analysis of mine bolter manipulator based on Chebyshev interval algorithms by Jun Zhang, Qing-xue Huang, Wenjun Meng, Xiangdong Yu, Guoying Meng and Lifeng Ma in Advances in Mechanical Engineering
Footnotes
Appendix 1
Handling Editor: Jia-Jang Wu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the National Key Research and Development of China (Grant number: 2016YTC0600900); The Yue Qi Distinguished Scholar Project of China University of mining & Technology (Beijing) (Grant number: 800015Z1145); Shanxi ‘1331 Project’ Key Subjects Construction (Grant number:20181101017) and CCTEG Project (Grant number:2018-TD-QN038).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.