
Abstract
Driving emotion plays an important role in intention generation and behavior decision. It is an important premise to understand the influencing mechanism of driving emotion on intention correctly for the realization of driving intention identification, active vehicle security warning, and intelligent driving. In the case of two-lane, multi-source dynamic data of human–vehicle–environment under drivers’ different emotional states is obtained through actual and virtual driving experiment in this article. Considering the influence of emotion on intention, the probability distributions of the driving intention in different emotions are obtained by means of the immune algorithm. And the priming effect of vehicle driving emotion on intention was analyzed deeply. The research results can provide theoretical foundation for the research of driving intention identification, active vehicle security warning system, and intelligent driving command system under the condition of Internet of things.
Keywords
Introduction
With the rapid development of economy in China, vehicle population, especially the number of private cars, is increasing rapidly. In the road traffic system, the contradiction of human–vehicle–environment is becoming more and more serious, 1 and traffic accidents happen frequently. According to expert analysis results, the influence of human factors is as high as 90% in the traffic accident, among which 70% are caused by drivers. 2 Controlling driver behavior is still an active factor in improving security of automobile. 3 Emotion is the psychological feedback in the process of anticipation and judgment of the related things in the environment, which influences the physiological behavior of human being. 4 Existing research indicates that driving emotion will affect driving behavior in driving process, and driving behavior is driven by driving intention. The influence of emotion on driving intention cannot be ignored in driving behavior research. 5 It is of great significance to reveal the mechanism of emotion on intention accurately for the research of driving intention identification, active vehicle security warning system, and intelligent driving command system under the condition of Internet of things. Through analysis result of literatures, at home and abroad, the research of emotion–intention interaction is mainly focused on sports,6–9 shopping consumption,10–15 environmental protection,14,16–18 moral education,19–21 and so on. For example, emotional factors had been added to traditional sports intention identification models by C Mohiyeddini et al., 6 and the results showed that it can improve the recognition ability of traditional sports intention identification model, if emotional factors were considered. After controlling for the theory of planned behavior constructs, X Wang 7 analyzed the moderating role of past behavior on the relationship between anticipated negative emotions and intentions. The results showed that the inclusion of past behavior can help better delineate the conditions under which anticipated emotions predict behavioral intentions. SMC Loureiro and Roschk 10 proposed a model to examine the effect of the atmospheric cues graphics design and information design on positive emotions and loyalty intentions. The results showed that in the offline context positive emotions predict loyalty among younger customers but not among older ones; in the online context the effect of graphics design on loyalty is stronger. The structural equation model had been used by HB Chen et al. 11 to study the influence of nostalgia on restaurant consumer intention. The results showed that nostalgia can not only promote the consumption intention but also weaken the consumption intention. According to the Mehrabian Russell Model, SH Tsaur et al. 12 studied the influence of aesthetic labor performance on the positive emotions and behavioral intentions of customers. The results showed that aesthetic labor performance had positive influence on customer’s positive emotion and behavior intention, and positive emotion had guiding function on customer behavior intention. J Wang and Wu 13 used the partial least squares structural equation model to study the relationship between consumer emotions and consumer intention. The emotions include pride, guilt, respect, and anger, and the purchases include energy-saving appliances and non-energy saving appliances. The results showed that pride, guilt, and respect for the three emotions had a positive effect on the two consumer intentions, while anger emotion only had a greater impact on the consumer intention of non-energy saving appliances. R Ladhari et al. 14 studied customer purchase intentions through customer perceptions of service quality and emotional responses to receiving services. The result showed that both service quality and service environment can affect customer satisfaction, and the higher the emotional satisfaction is, the stronger the purchase intention is. R Ladhari et al. 14 researched the role of emotions in utilitarian service settings. The results showed that perceived service quality and service environment both increase positive emotional satisfaction, and positive emotional satisfaction leads to a high perception of product quality, high recommendation, patronage intention, and likelihood of purchase. NS Harth et al. 16 compared and analyzed the predictive effects of three group emotions, including pride, guilt, and anger, on three intentions related to the natural environment. The result showed that guilt feeling makes people more inclined to have the intention to repair the environment, anger feeling makes people more inclined to have the intention to punish the environmental destroyer, and pride feeling makes people more inclined to have the intention to protect the environment. J Yang et al. 17 discussed the relationship between the festival visitors’ behavior intention, consumption emotion, and perceived value. And they also analyzed the moderating effect of festival environmental on the influence of tourists’ consuming emotion and perceived value on behavior intention. S Chen 21 used the clinical interview method of story situation to investigate the influence of different situations on the judgment and attribution of moral emotion in children aged 4 to 6. In the field of traffic, the study of driver’s intention by experts at home and abroad is mainly to identify driver’s intention by using road curvature, lane line position, and other factors. However, the interaction between driver’s emotion and intention was not found. For example, Dogan et al. 22 explored the effect of machine learning on driver’s intention identification. The variables of road curvature, lane position, steering wheel angle, lateral acceleration, collision time, and so on were combined, and the artificial neural network model and support vector machine were used to predict the driver’s behavior. In the research of J Peng et al., 23 a prediction index system for left lane change was constructed by considering drivers’ visual search behaviors, vehicle operation behaviors, vehicle motion states, and driving conditions. And a back-propagation neural network model was developed to predict lane-changing behavior. In the research by L Ohashi et al., 24 the data such as driver’s motions, speed of the vehicle, and the distance between the vehicle and the intersection were analyzed, and the concept fuzzy set theory was used to identify driver’s intention (e.g. turn left, turn right, or go straight).
The movement of the vehicle is determined by driving behavior, which keeps the driver’s life safety. 25 C Ma et al. 26 explored the influence of driving behavior on driver’s life safety. Diving intention changes with the real-time change of emotion and environment, and it guides the driving behavior. Human cognition and behavior are regulated by emotion, 4 and all purposeful behaviors are carried out under the influence of emotion. It is helpful for improving road traffic safety to study the influence of emotion on intention.27,28 However, many scholars of domestic and overseas often neglect the influence of emotion on intention in the aspects of studying driving intention, which cause difficulties in accurately reflecting the true mental state of drivers and intention identification. In view of this, the complexity of vehicle marshaling is analyzed in this article in two-lane environment. And multi-source dynamic data of human–vehicle–environment under drivers’ different emotional states is obtained through actual and virtual driving experiment. Effect analysis model of emotions on drivers’ intention based on immune algorithm is established, and the influence of different emotions on driving intention is deeply analyzed.
Method
Analysis of the complexity of vehicle marshaling
The vehicle marshaling relationship is composed of dynamic traffic entities, and it has important influence on driver’s behavior decision.29,30 The research scenario is defined to analyze the impact of driver emotion on intention in different vehicle marshaling relationships (as shown in Figure 1) better. When the target vehicle is running in the right lane, the vehicles in the driver’s interest-sensitive area (defined as the area with greatest impact on vehicle safety and the driver’s attention) are divided into target vehicle u (a car that is driven by a test is called a target vehicle), forward vehicle
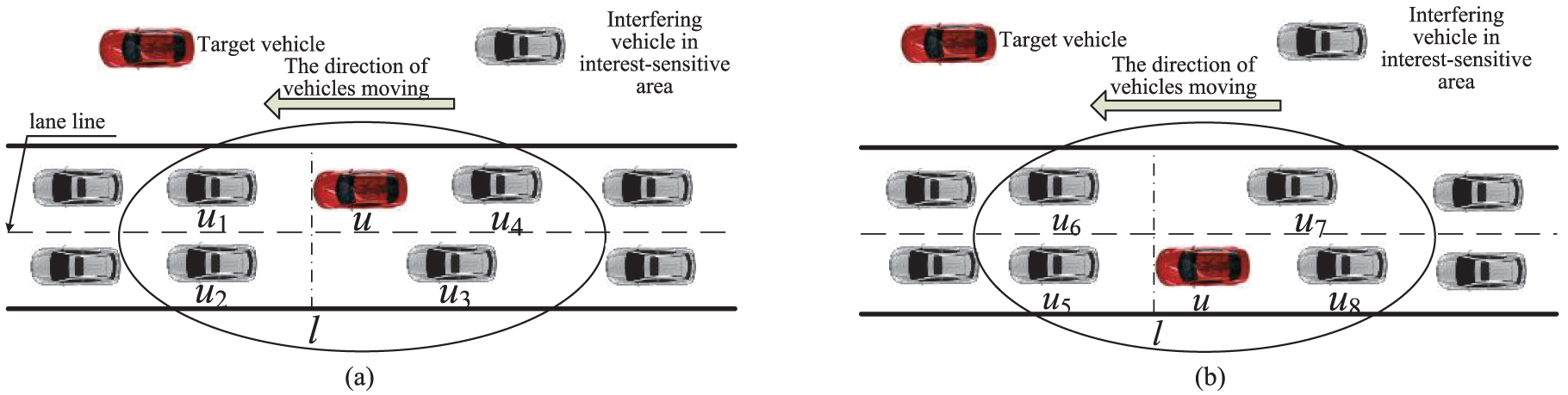
Position of vehicle around target vehicle in two-lane environment: (a) the target car is in the right lane; (b) the target car is in the left lane.
The 32 vehicle marshaling relationships are constructed in two lanes, based on the above scene definition method. The interfering vehicles at different locations have different effects on the target vehicle drivers.32,33 When the target vehicle is moving in a two-lane environment, the vehicle marshaling relationship is shown in Figures 2 and 3.
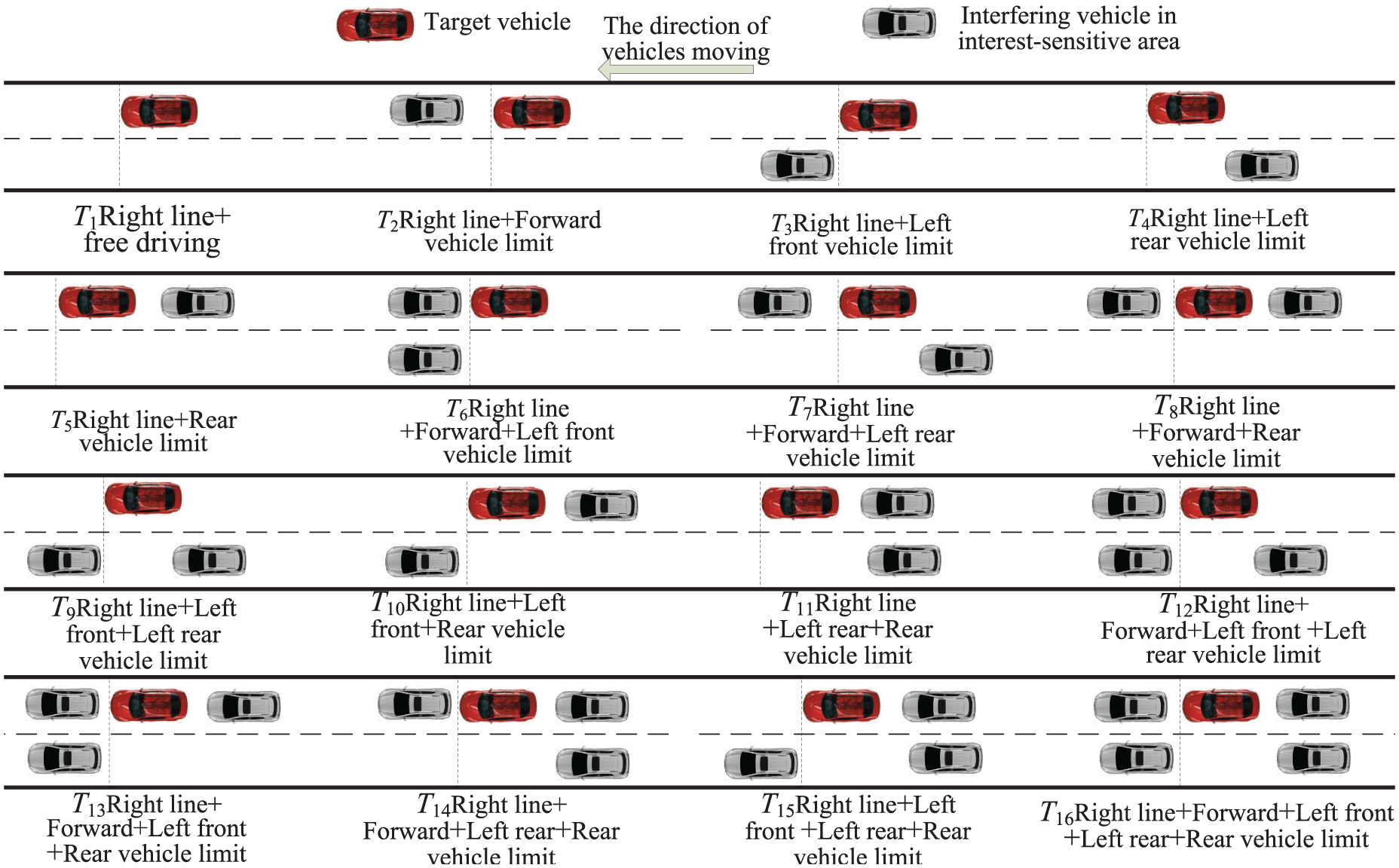
Vehicle marshaling relationship in two-lane environment when the target vehicle runs in the right lane.

Vehicle marshaling relationship in two-lane environment when the target vehicle runs in the left lane.
Effect analysis model of emotions on driving intention based on immune algorithm
Introduction of immune algorithm
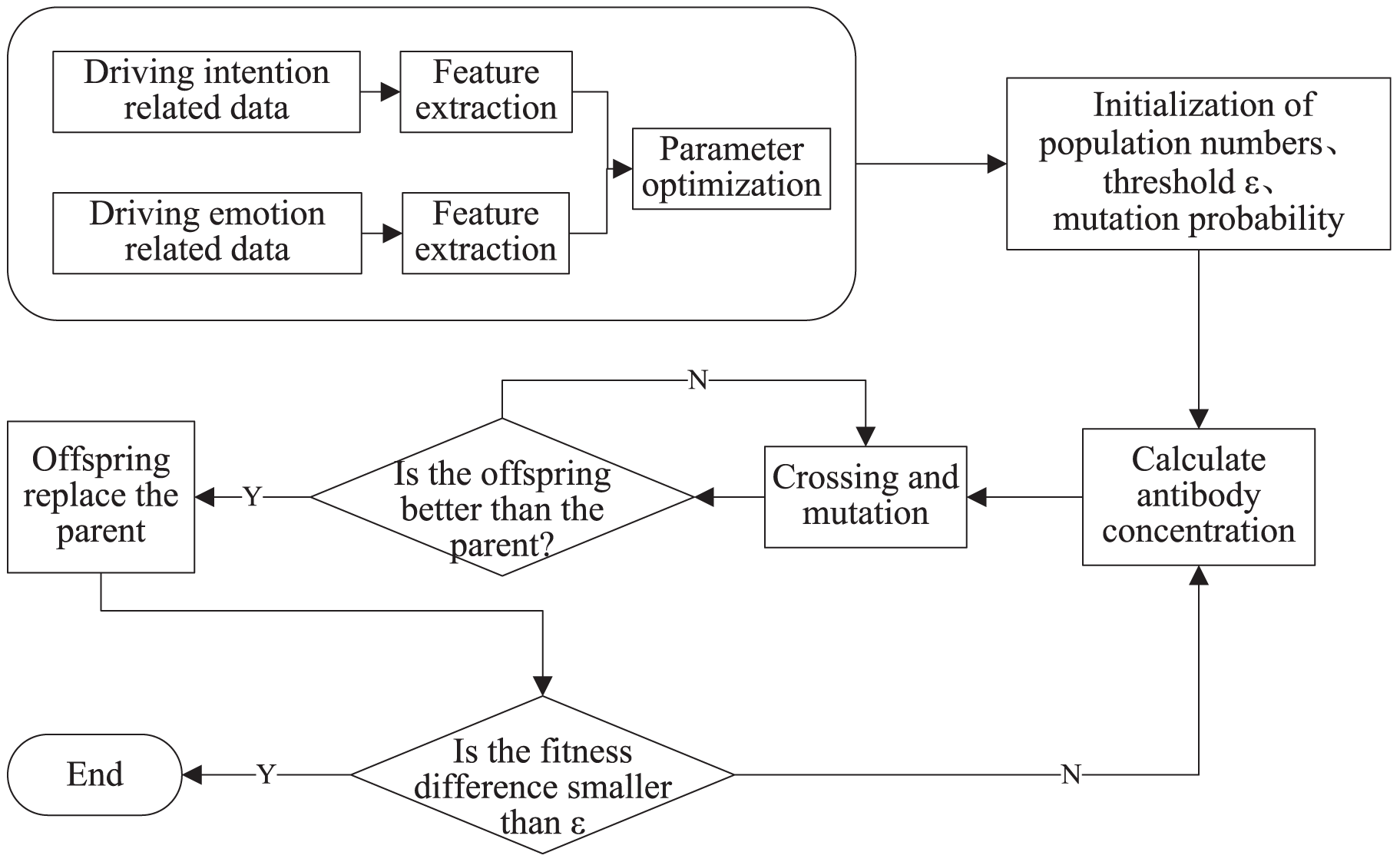
The biological immune system is simulated by the immune algorithm, 34 and it is an algorithm with some characteristics, such as memory mechanism, regulation mechanism, and evaluation mechanism and produces some kind of specific antibody intensively. This algorithm is implemented by multi-point parallel computation. Excellent solutions are memorized and retained, and local convergence problems are effectively avoided. 35 The functions of immune algorithm such as immune memory, self-regulation, and diversity preservation are exploited by immune-genetic algorithm based on information entropy. The affinity and concentration of antibodies are expressed by information entropy. The diversity of the real immune system is reflected. And the self-regulation function of immune response is manifested by promoting or inhibiting the production of antibodies.36–38 Probability distribution of the driving intention given the emotion status is obtained by immune-genetic algorithm, and, based on that, effect analysis model of emotions on driving intention is established. The algorithm flow is shown in Figure 4.

Flowchart of immune algorithm based on information entropy.
Modeling
The immune-genetic algorithm combines the advantages of biological immune principle and genetic algorithm. In this study, seven kinds of driving intention such as keep the speed straight (It1), speed up straight (It2), speed down straight (It3), keep the speed lane change (It4), speed up lane change (It5), speed down lane change (It6), and stop (It7) are regarded as antigens, and, correspondingly, eight kinds of common emotions such as anger (Em1), surprise (Em2), fear (Em3), anxiety (Em4), helpless (Em5), flout (Em6), relaxation (Em7), and joviality (Em8) are regarded as antibodies. The affinity and concentration of antibodies are represented by information entropy. The driving emotion set is represented in binary coding. (Character set encoding of antibodies is shown in Figure 5.) It can be supposed that there are n antibodies in the immune-genetic algorithm based on information entropy, and each antibody has m genes. The character set of each bit in genes is

In the equation (1),

Usually,

In the equation (3),

In the equation (4),
The corresponding selection mechanism was adopted to promote and inhibit antibody production, depending on the concentration of each antibody. The selection probability

In equation (5),

As is known from equation (6), selection probability is related to both fitness probability of antibody and conditions of antibody concentration. In this way, the diversity of individuals is maintained while antibodies with higher fitness are retained. The constant adjustment factor could change the power of each part of selection probability. It can be seen from this, under certain conditions of antibody concentration, the larger fitness probability of antibody is, the greater selection probability will be; under certain conditions of antibody fitness, the larger antibody concentration is, the smaller selection probability will be. This could effectively prevent some individuals from controlling the selection process, suppress individual premature phenomenon that all individuals in the group are trapped in the same extreme value and stop the evolution, and enhance the local search ability. In this way, the diversity of individuals is maintained while antibodies with higher fitness are retained.

Character set encoding of antibodies.
According to the above contents, effect analysis model of emotions on driving intention based on immune algorithm is established (shown in Figure 6). Driving intention is comprehensively evaluated by means of analyzing driver characteristics, vehicle and environment, and video replaying of the experiment process, driver questioning, and so on. The fitness of each driving intention under different emotional states is scored in two-lane environment. And the larger the fitness is, the higher the scores will be. The probabilities of drivers’ different intention in an emotional state are obtained with above calculation method.
Effect analysis model of emotions on driving intention based on immune algorithm.
Experimental design and data processing
Experimental design
The actual driving experiment environment is more close to the natural driving. The data from actual driving experiment can reflect the driver’s real state better. But the experimental is difficult to organize and the cycle is longer. Although there are some differences between virtual driving experiment environment and actual driving experiment, the virtual driving experiment has few restrictions and shorter cycles.
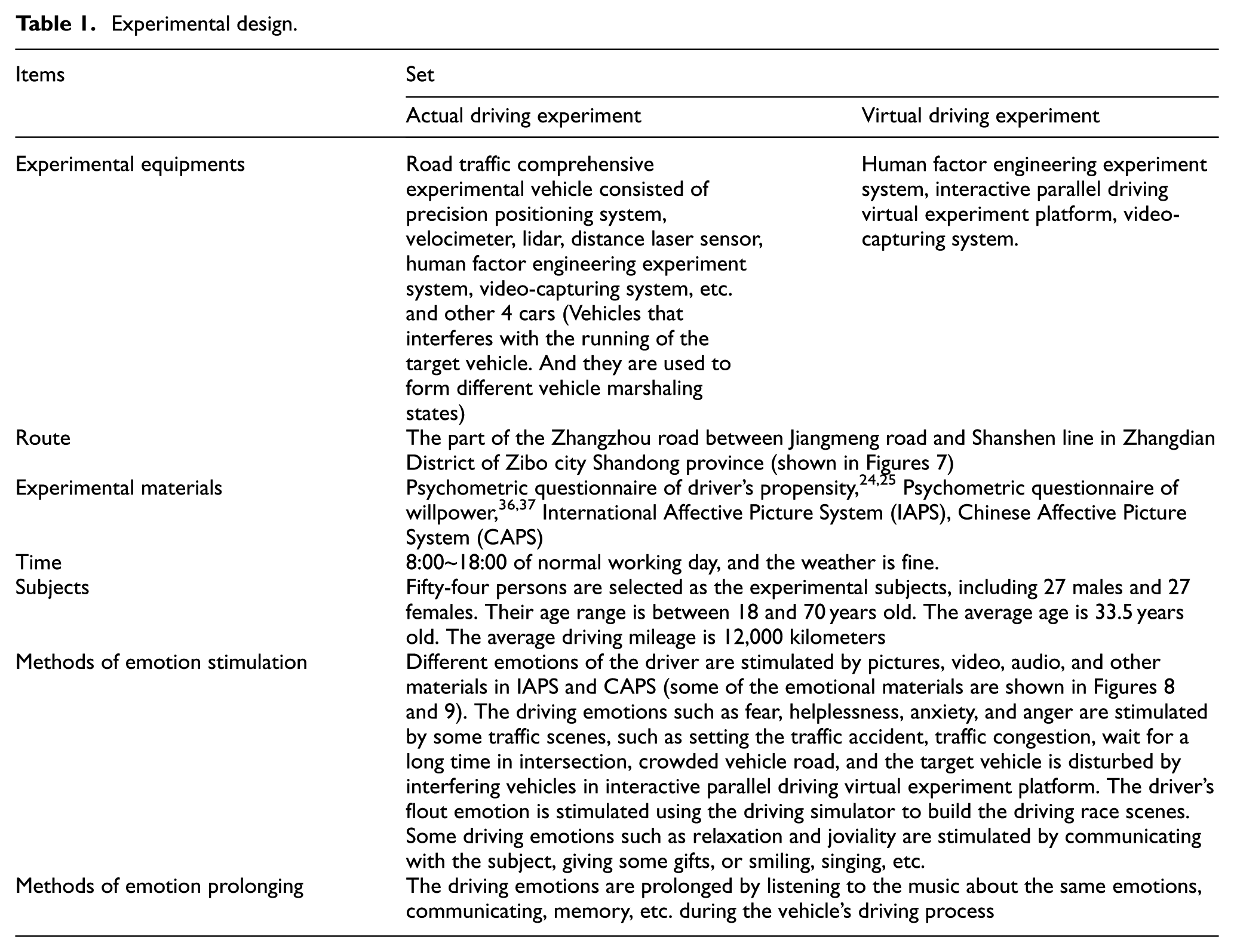
Seven kinds of driving intention such as keep the speed straight (It1), speed up straight (It2), speed down straight (It3), keep the speed lane change (It4), speed up lane change (It5), speed down lane change (It6), and stop (It7) and eight kinds of common emotions such as anger (Em1), surprise (Em2), fear (Em3), anxiety (Em4), helpless (Em5), flout (Em6), relaxation (Em7), and joviality (Em8) are used for this study. The driving intentions are selected by analyzing the vehicle driving status in two-lane environment.27,28 The driving emotions are selected by referring to negative and positive emotions put forward by Victor S Johnston,39,40 and the survey of common emotions during driving. The experimental design is shown in Table 1, and some driving emotion visual stimulus material is shown in Figures 8 and 9.
Experimental design.

Actual driving experiment route.

Partial driving emotion visual stimulus material.

Part picture of joviality emotion face.
Tests of driver physiology and psychology
Basic information of drivers such as age and gender are counted. The drivers’ reaction times are obtained by physiological test and the test method used by Yang. 41 Drivers’ propensity (conservative, common, radical) and willpower (strong, middle, weak) types are determined by weighted calculation, based on driving propensity questionnaire and willpower test questionnaire.
Driving experiment
Drivers are familiar with the experimental vehicle (environment including the actual and virtual experiment vehicle) before the driving test begin. Drivers listen to soothing music before emotional stimulation. When drivers are in a relaxed state, their emotions are stimulated through pictures, video, audio, and other materials in IAPS and CAPS. Driving emotions are determined according to their facial expressions and inquiry results. And driving experiments start after determining the driver’s feelings. According to different emotional characteristics, in addition to using the above material to stimulate emotions, a variety of methods such as spiritual motivation and material reward are also used (shown in Table 1). The vehicle environment dynamic data in different vehicle marshaling is obtained synchronously by instruments. In the running process of vehicles, the Jamming vehicles are used to form different vehicle marshaling relationships. And the driver’s facial expressions and movements are videotaped. The driving experiment scene is shown in Figures 10 and 11.

Actual driving experiment.

Virtual driving experiment.
To ensure the effectiveness of the induction method and the scientific of the experimental design, the experiment simulations had been done many times. In the experiment simulations, the experimental organizers were seen as experimental objects by turns. The 54 selected objects drives mentioned in this article were not used in the experiment simulations, because some emotion induction method could not use many times. For example, it is easy to induct one’s joviality emotion using material reward method at the first time; however, the driver may take the prize for granted when the method was used over and over and the joviality emotion would not be inducted. In the experiment simulations, the emotion induction method for each emotion and every aspect of induction experiment was adjusted and revised constantly until the optimal effect is achieved.
The result of emotion induction affected the validity and reliability of the research directly. The natural speech questioning, emotional self-report, emotional survey scale, analysis of facial expressions, and behavioral actions during driving were utilized comprehensively to assess the result of emotion induction in this article. The driver’s emotions were mainly labeled by emotional survey scale, and the natural speech questioning, emotional self-report, analysis of facial expressions, and behavioral actions during driving were used to verify the validity of emotional survey scale. If inconsistent results of emotion induction through different valuation methods were got, the experiment data would be seen as invalid data and would be removed. The CAPS adjective lexicon contains 500 adjective words, and the pleasure, arousal, and dominance degree index of each word was assigned by the 9-point scale. All the words were divided into five grades according to the pleasure, arousal, and the dominance degree that correspond to the five grades of the pleasure, arousal, and dominance degree of PAD emotion model. Three words were selected separately from different grades words of pleasure, arousal, and dominance degree (totally five groups) to form the grades survey scale of pleasure, arousal, and dominance degree. Experimental objects’ facial expressions and behavior during driving were recorded in real time with video detection system. The experimental objects’ emotion experience was inquired through natural speech questioning, and the results of the inquiry were recorded. After the driving experiment, the experimental objects would watch the video playback and report their emotional experience at different moments of the video. The experimental objects also needed to select the word groups that were most close to actual emotional experience at different moments from the grades questionnaires of pleasure, arousal, and dominance degree according to the meaning of words. The effectiveness of emotion inductions was determined finally according to the results of natural speech questioning, emotional self-report, emotional survey scale, the analysis of facial expressions, and behavioral actions during driving through the above methods.
Data processing
According to the above method, drivers’ emotions are stimulated, and then the drivers are organized to conduct driving experiments. After the driving test, the drivers watch the driving video immediately and report the emotional experience of each time period to the experimental organizer. Combined with emotion self-report, natural speech questioning, emotional survey scale, analysis of facial expression, and behavioral action during driving were utilized comprehensively to assess the effectiveness of emotion induction. After analyzing a large amount of data, each emotion is divided into three kinds: strong, middle and weak. Based on emotional screening, the emotion–intention combination units of these eight emotions and seven driving intentions are counted in different vehicle groups. And each data unit corresponds to an emotion–intention combination and the corresponding data of driver characteristics, vehicle, and driving environment. In real vehicle and virtual driving experiments, 9384 and 77,261 affective emotion–intention combination units are obtained under 32 vehicle marshaling relationships. And these data together form the original database; part variables and experimental data are shown in Tables 2 and 3.
Partial variables and symbols.

Interfering vehicles are vehicles in which the target vehicle is affected directly in interest-sensitive area. i is the number of the interfering vehicle (shown in Figure 1),
Rules of supplement for traffic participant representative.

Three experimental objects’ data, which was got from the emotion-inducted driving experiments, are enumerated in Table 3. The data included some typical and relatively stable characteristic parameters of the driver and the movement characteristic parameters of vehicle which was driven by the driver with a kind of emotion. The drivers’ characteristic parameters could represent his or her personal features associated with emotion, such as emotional intelligence, affective sensitivity, and so on. For example, it is generally more difficult for the driver with a relative more years’ driving experience to evoke an emotion in the driving process, because more abundant driving experience made him or her more deliberate to face different kinds of traffic situations. It can be seen from the emotion induction experiments clearly. However, once emotion was evoked, especially negative emotion, the behavioral expression of the driver with more driving experience could be more radical. On the one hand, he or she who was confident in his or her driving skills would pursue a high driving speed. On the other hand, when the speed or space requirements were blocked by other inexperienced drivers, his or her emotion state would become more terrible and risky driving behavior would be taken. The movement characteristic parameters of vehicle were important data to estimate the driver’s physical and psychological state. In the emotion-inducted driving experiment, the differences of driver’s facial expression, speaking, body movement, and so on were obvious in different driving emotion states. For example, a driver with anger emotion generally had a fierce brake and a high driving speed. On the contrary, the driver would be gentler to brake and the driving speed always at a very low level which was slower than his or her desired speed under the state of fear emotion. As can be seen from the experiment data listed in Table 3, the speed values had a big span for one driver in certain emotion state compared with the desired speed. For the NO.1 driver who had a desired speed of 40 km/h, the driving speed was 35.63 km/h under the joviality emotion state. Similarly, for the NO.n driver who had an desired speed of 35 km/h, the driving speed was 31.05 km/h under the relaxation emotion state, whereas for the driver of NO.2, the driving speed under fear emotion states was higher than her expected speed. It may be given rise to the other personal characteristics or experimental environment. The other parameters showed the similar pattern. It should be pointed that the parameters selected in this study were all non-intrusive data of which acquisition process would not affect driving task. It is of great significance for the realization of the real-time and online identification of drivers’ emotions.
In the above variables, G,
Relevant variable settings.

Result
Parameter calibration
The 64,000 sets of valid data are selected from the above database. The population numbers is set to 400. The affinity constant

The (a) probability and (b) iterative process of driving intention appear in anger state.
Algorithm evaluation
The 32,000 sets of valid data are randomly selected from the experimental data and entered into the above algorithm. The highest driving probabilities of the algorithm are used as the final emotion stimulation result and compared with the results of the video playback and the driver’s query. The comparison results are shown in Figure 13.

Comparison of algorithm results and experimental results.
Identification results of driver intentions get from alignment algorithm and experiments in anger, surprise, fear, anxiety, helplessness, flout, relaxation, and joviality emotion states as shown in Figure 13. And the probability output of the algorithm (89%, 75%, 87%, 84%, 72%, 86%, 70%, and 75%, respectively) are same as the experimental result. It can be proved that the algorithm used in this article is of higher reliability.
Discussion
The following conclusions are obtained by analyzing emotions on driving intentions in two-lane environment (Considering the space constraints, only the probability distributions of driving intentions in different emotion states in vehicle marshaling T8 are list, as shown in Figure 14.). In the same vehicle marshaling relationship, the driver will have different driving intentions in different emotional state. In different vehicle marshaling relationship, the driver will have different driving intentions in the same emotional state. Drivers in the angry state are expected have high speed. The desired spacing with surrounding car is small. They also have the higher average speed in the driving process, and the behavior decisions are more aggressive. They tend to speed up or speed up lane change. For example, the probability of speeding up lane change intention is as high as 0.333 in vehicle marshaling
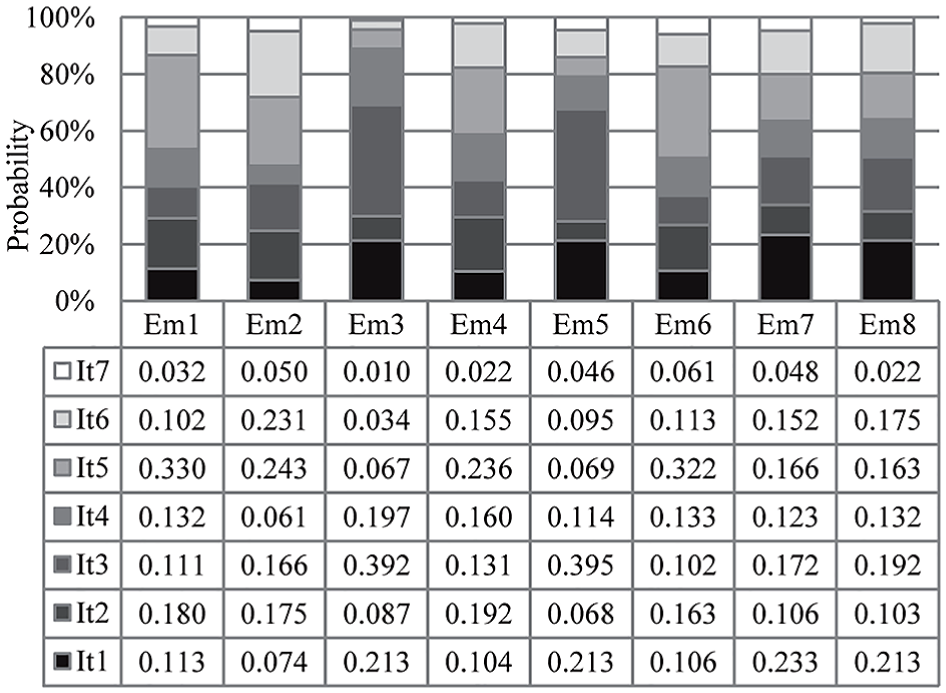
Probability of driving intentions in different emotional state in vehicle marshaling T8.
Conclusions
The accurate identification of driving intention is an important guarantee for building vehicle security warning system, especially for traffic situation safety assessment subsystem. Driving emotion plays an important role in intention production and behavior decision making. Therefore, it is very important to introduce the emotion on intention guidance mechanism into the vehicle security warning system. In this article, multi-source dynamic data of human–vehicle–environment is analyzed in two-lane complex environment. Effect analysis model of emotion on driving intention based on immune algorithm is established. And the effect of emotion on driving intention is further studied. In the theory and methodology, the vacancy of the relationship study between emotion and intention in embryology is made up. In application, it provides new idea and theoretical basis to research and develop an active safety driving warning system for automobile system. But, as a preliminary study of the effect of emotion on intention, there are still many areas that need to be strengthened in this study. In the follow-up work, factors such as driver’s health condition, temperament type, blood type, occupation and other self-factors, as well as the game behavior of vehicles in interest induced area and other factors, will be further considered to reduce the experimental error. Considering the situation of driver may produce two or more emotions at the same time in the process of driving, further research on effect analysis of emotions on driving intention can focus on the more detailed driving emotion selection and definition, which would improve the accuracy of research. The theoretical basis of the auxiliary driving system of active vehicle safety is offered by the results.
Footnotes
Handling Editor: Liping Jiang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Joint Laboratory for Internet of Vehicles, Ministry of Education—China Mobile Communications Corporation under Project (grant number ICV-KF2018-03); the State Key Laboratory of Automotive Safety and Energy under Project (grant number KF16232); the National Natural Science Foundation of China (grant numbers 61074140, 61573009, 51508315, 51608313); Natural Science Foundation of Shandong Province (grant number ZR2014FM027); Social Science Planning Project of Shandong Province (grant number 14CGLJ27); and Project of Shandong Province Higher Educational Science and Technology Program (grant number J15LB07).