
Abstract
The design of variable stiffness mechanism is of great importance to wheelchair-mounted robotic manipulators. In this article, the authors propose a cable-driven parallel–series hybrid joint toward wheelchair-mounted robotic manipulators with adjusting the system stiffness actively. The joint is a cable-driven, compression-spring-supported hybrid mechanism. Then, the kinematic analysis and cable tension analysis through static modeling are established to derive the joint stiffness model. Finally, cable-driven parallel–series hybrid joint stiffness adjustment ability analysis is carried out in four different load cases with MATLAB. Featured with light structure, stiffness adjustability, and large workspace, the proposed cable-driven parallel–series hybrid joint proves to be of great potential use for wheelchair-mounted robotic manipulators.
Keywords
Introduction
Wheelchair-mounted robotic manipulator (WMRM) is a typical type of the assistive robot to help disabled elderly people with their activities of daily living (ADLs).1,2 The research and development (R&D) of WMRMs can be traced back to the1960s. 2 Over the past 50 years, nearly a dozen WMRMs have been developed. However, the products are not widely available in the market, owing to poor usability, low payload, and high cost.1,2 These problems can be ameliorated by the cable-driven mechanism (CDM), thanks to its low inertia, large workspace, high payload-to-weight ratio, good transportability, fully remote actuation, and ideal reconfigurability. 3 Meanwhile, physical human-robot interaction is the core of a WMRM. The key of the interaction lies in the compliant behavior of the robot, namely, in which the variable stiffness mechanisms are used. Multiple mechanical design idea to achieve variable stiffness has been developed. From the arrangement of the actuators, Nam et al., 4 Petit et al., 5 and Tagliamonte et al. 6 pointed out that there are two categories. The first is in serial configurations: a bigger motor to adjust the joint torque/position and another smaller motor to adjust the joint stiffness. The drawback of this configuration is that the maximum torque is limited by the smallest motor.7–9 The second is in parallel configurations or antagonistic variable stiffness mechanism inspired by the musculoskeletal system.4,5 This actuation architecture causes two significant drawbacks: the necessity of using complex control algorithms to achieve the desired behaviors and a reduced energetic efficiency. 6 Azadi et al. 10 and Boehler et al. 11 proposed CDM as antagonistic variable stiffness mechanism which could provide a faster response, coming from the level of internal forces (prestress) in the links of the mechanism. The use of the prestress modulation to generate variable stiffness can be very effective to obtain large stiffness variations without modifying the equilibrium configuration. 10 From physically controllable impedance, 6 a number of variable stiffness mechanism have been developed by changing the shape or geometry of the mechanism using mechanical methods. 10 Most of the mechanical methods make use of complex nonlinear spring mechanisms,12,13 such as controlling the effective number of active coils in a coil spring, using adjustable pitching stiffness, and adjusting the gap between two leaf springs. Hence, CDM coupled with stiffness adjustability may address some safety issues in the physical human-machine interaction 14 with relatively low energy consumption and low cost.
CDM stiffness analysis is divided into static stiffness analysis (SSA) and dynamic stiffness analysis (DSA).15–17 The SSA of CDM is aiming to analyze and improve the static positioning accuracy,16–18 especially for the pick-and-place application, 19 such as the CoGiRo. 18 The purpose of DSA of CDM is to analyze the vibration of those applications15–17 requiring high performances, especially dynamic performances, 16 such as high-speed FALCON 20 and large radio telescope FAST (Five-hundred-meter Aperture Spherical radio Telescope). 21 Whether SSA or DSA, cable modeling should be studied first. Generally, there are three different models of cable, namely, ideal lines which have no mass and no flexibility, a massless spring, and the sagging cable model that considers cable mass and elasticity.15,16 The first model is the simplest cable model used in the theoretical analysis of CDM. The second model is valid and efficient for light-weight, 18 low-speed, 15 and small-size robots.22,23 The third model is used for high-speed, large-dimension, or heavy-load CDM.16,23–28 Previous researches have shown that the sagging cable model is divided into two-dimensional inclined cable16–19,29 and three-dimensional inclined cable.15,23,30 Riehl et al. 29 analyzed the influence of the sagging cable model on the end-effector positioning, the control lengths of the cables, and the cable tensions. They pointed out that for large working volume manipulators, this aspect needs to be taken into account at the design level in order to achieve good positioning and accuracy. Comparing these three models, the third is the most accurate, but numerous CDMs designed under the second model are working well in practice, and it is believed that this model is practically valid. 31
Verhoeven et al., 32 Behzadipour and Khajepour, 33 and Anson et al. 34 took cables as massless springs and pointed out that the static stiffness depends on the stiffness of the cables and the geometrical arrangement of the cables and can be always improved by increasing the antagonistic forces in the cables. All of them use the Jacobian-based stiffness analysis method16,35 to explain the Cartesian stiffness matrix as the function of a manipulator’s configuration and joint stiffness values. Actually, cables as massless springs just consider axial stiffness of cables; however, if the cable profile is a sagging curve and it needs to consider transversal stiffness, Jacobian matrix cannot be used to calculate the Cartesian stiffness matrix. 16 Amare et al. 15 made SSA and DSA of the CDM in three-dimensional inclined plane with external forces exerted by hydraulic cylinder on the system. Yuan and colleagues16,17 studied the variation of pose error with external load for evaluating the static stiffness performance of CDM and used dynamic stiffness matrix method to identify the system natural frequencies to solve the vibration problems of structures. Nguyen et al. 18 proposed a simplified sagging cable model to establish a new expression of the cable unstrained length to make SSA which was verified to help to improve the positioning accuracy of a large-dimension CDM in simulation and experiments.
This article focuses on the SSA and stiffness adjustment of a cable-driven parallel–series hybrid joint (CDPSHJ) toward WMRM inspired by the three types of humanoid joints.36–39 CDPSHJ is a cable-driven, compression-spring-supported hybrid mechanism. According to the application characteristics of WMRM, it is appropriate to model the cable as a massless spring. Linear helical compression spring provides nonlinear stiffness characteristics under combined bending and compression effects;39–41 meanwhile, CDPSHJ stiffness adjustment is achieved by the additional translation motion; hence, CDPSHJ is the simplification of nonlinear stiffness mechanism. That is to say, the CDPSHJ provides a simple, compact solution to the stiffness adjustment problem. To the best knowledge of the authors, there are only a few studies analyzing the effect of lateral bending and compression of spring. In this article, concerning the elastic stability under lateral bending and compression, the coil spring can be treated as an elastic beam,38,41 so the spring lateral bending and compression model based on the elliptic integral solution is introduced. Compared with other methods, this method solves the large-deflection problems in compliant mechanisms more accurately. 42 Then, based on the statics, the Cartesian stiffness matrix is deduced by the Jacobian-based stiffness analysis method to analyze the joint variable stiffness, which is found to be affected by the compression spring in addition to the cable stiffness and antagonistic forces.
This article is organized as follows: The concept of CDPSHJ is presented in the “CDPSHJ description” section; then, the kinematic modeling is presented in the “Velocity Jacobian matrix” section; next, the static modeling and lateral bending and compression modeling of the spring are given in the “Tension analysis” section; after that, the stiffness adjustment of the mechanism is investigated in the “CDPSHJ variable stiffness analysis” section; and finally, conclusions obtained from the results are presented in the “Conclusion” section.
CDPSHJ description
The human elbow joint is controlled by the biceps and triceps muscles. Flexion (Figure 1(a)) occurs when the biceps contracts and the triceps relaxes, and extension (Figure 1(b)) is achieved in the opposite manner. Based on the musculoskeletal mechanism, an elbow joint has been designed for WMAMs. The keywords of design idea of CDPSHJ are cable-driven and stiffness adjustment. As shown in Figure 2(a), cable 1 and cable 2 imitate biceps brachii and triceps brachii, respectively, and drive the upper platform (moving platform); a compression spring and cables 1 and 2 support the two platforms, which is regarded as the parallel part; two rigid shafts with a revolute pair are in the middle of the spring and rigid shaft 1 passes through the upper platform, which is regarded as the series part. Linear helical compression spring provides nonlinear stiffness characteristics under combined bending and compression effects, so the CDPSHJ is a variable stiffness mechanism and it has a total of 2 degrees of freedom. One is rotation and the other one is translational motion, which is designed to adjust the stiffness of the spring to determine the joint system stiffness. Therefore, CDPSHJ is the simplification of nonlinear stiffness mechanism. That is to say, the CDPSHJ with stiffness adjustability toward WMRM may address some safety issues in the physical human-machine interaction 14 with relatively low energy consumption and low cost.
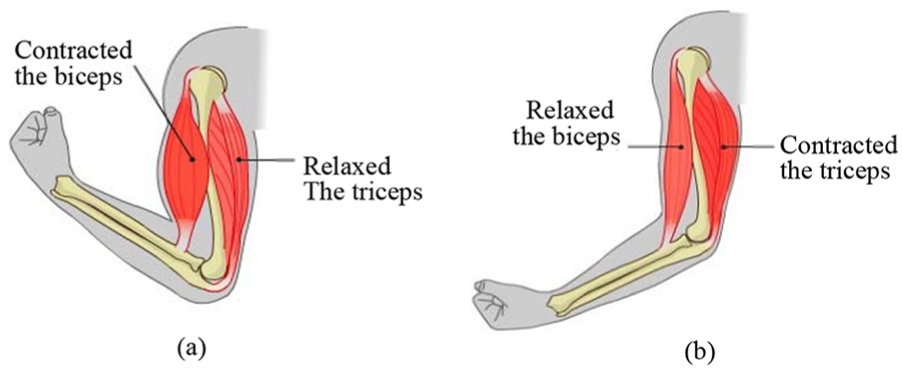
Elbow joint motion mechanism: 43 (a) elbow flexion and (b) elbow extension.

Diagram of the CDPSHJ: (a) 3D joint mechanism and (b) 2D joint diagram.
Velocity Jacobian matrix
Figure 2(b) is the diagram of the CDPSHJ. The upper and lower platforms are designed as homogeneous disks with a radius of b and a, respectively. The two Cartesian coordinate systems {O1x1y1z1} and {O2x2y2z2} are fixed to the centroid of the two platforms, respectively, and {O1x1y1z1} is the global coordinate system. The connecting points of cables 1 and 2 are denoted as A1, B1, A2, and B2, respectively, and the distance from O1 to the revolute pair center is d. The spring is simply drawn as an arc.
As mentioned in the previous section, the CDPSHJ has a total of 2 DoFs. One is the rotation around the Z-axis and the other is the translational motion on the X-Y plane. Due to the rigid restraint of the rotation pair in the middle, the relationship between the motion relative to O2 along the X-axis and the Y-axis is as follows


where
The first-order differential kinematics is necessary for singularity analysis and kinematic control, and the velocity Jacobian matrix is necessary for the analysis of mechanism velocity and stiffness. It is the nonlinear mapping between the position change of the moving platform and the length change of the cable. It can be known from equation (2)

Differentiating equation (3) with respect to time, we obtain

where

Using

The above formula can be expanded as

where

Substituting equation (8) into equation (7) and simplifying it, we obtain

where
Hence

where
So, now, the velocity Jacobian matrix
Tension analysis
In order to study whether the system has enough stiffness to withstand certain loads, cable tension analysis is carried out in load case. The static analysis model of point O2 is shown in Figure 3. Due to the small mass of the upper platform, the gravity of the upper platform


where

where
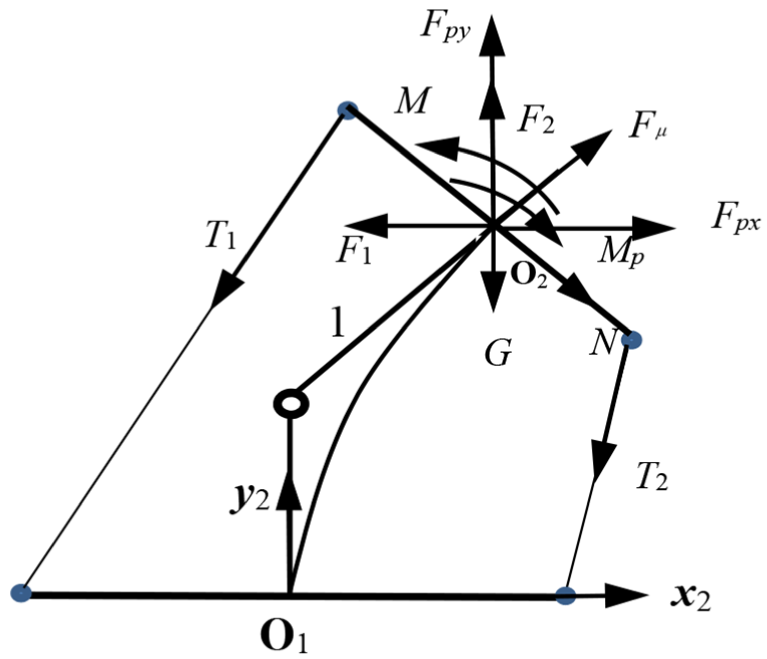
Static analysis model of point O2.
Static analysis of lateral bending and compression spring
Timoshenko and Gere
41
pointed out that the coil spring under lateral bending and compression could be treated as an elastic beam, but it should consider the change in the length of the spring due to bending and compression. To solve the large deflection problems in compliant mechanisms, the elliptic integral solution is often considered to be the most accurate method for modeling large deflections of beams.
42
According to this idea, force analysis is performed on the bending and compression spring of the CDPSHJ, as shown in Figure 4. The end forces of the spring satisfy

where β is the bending stiffness of the spring and


where
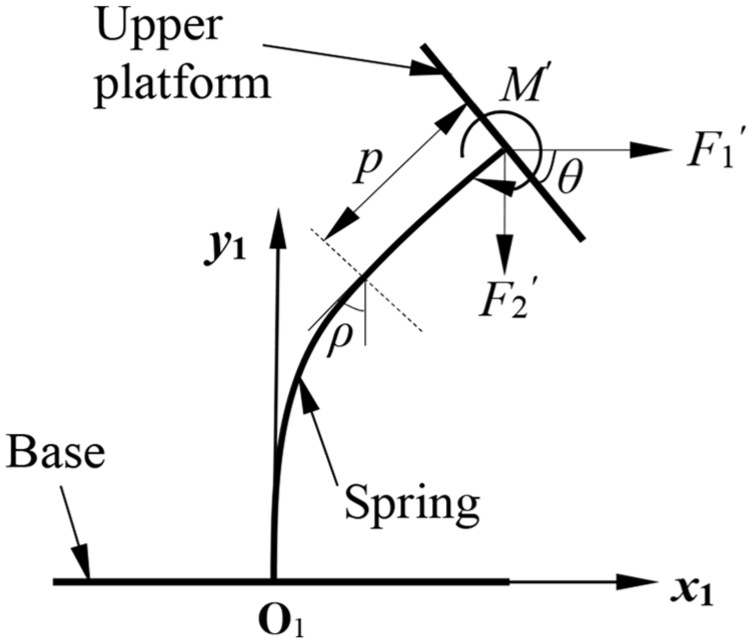
Force analysis diagram of the compression spring.
Because
It is important to note that when θ = 0°, the compression spring, as a linear spring, meets Hooke’s law. So, F1 = 0 and M = 0. The three equilibrium equations developed by static analysis can be used to solve T1 and T2.
CDPSHJ variable stiffness analysis
Stiffness is an important feature of a robotic device. It is directly related to the structure and rigidity of the robotic device. Compliant design is needed to allow a WMRM to produce high stiffness when it is performing tasks and low stiffness during motions. In this article, the CDPSHJ has the feature with variable stiffness. The purpose of SSA of the CDPSHJ is as follows. First, understand the stiffness change in the mechanism to know whether the system has enough stiffness to withstand certain loads. Second, understand the stiffness change in the mechanism in the workspace to know how to adjust the system stiffness. Third, by studying the SSA, theoretical preparation is made for the design of mechanism control scheme and the realization of system.
Based on the static analysis, the Cartesian stiffness matrix is deduced by the Jacobian-based stiffness analysis method to analyze the CDPSHJ stiffness adjustability. As the CDPSHJ is to be applied to the WMRM that assists the disabled elderly people in performing ADLs, the elbow joint range of motion is 110°.
45
In conducting the variable stiffness analysis, cable is modeled as a massless spring, whose profile is a straight line. For CDPSHJ at static equilibrium, the incremental displacement


where
From equation (18), it can be observed that CDPSHJ stiffness actually comprised two types of stiffness in series—the cable elastic stiffness and the actuator stiffness arising from the closed-loop control system.33,34 In general, the system stiffness is highly dependent upon the pose and actuation arrangement of the manipulator. Similarly, there are three categories for stiffness adjustment 34 of CDPSHJ. First, change the cable stiffness by varying the stiffness of each individual cable. Second, modulate the stiffness matrix through a reconfiguration of the system. 46 Third, choose the desired cable tension from the stiffness point of view, which is challenging. This article focuses on analyzing the latter two ways to achieve the variable stiffness adjustment of the mechanism.
Stiffness matrix homogenization
In order to evaluate and compare the different layouts of the CDPSHJ or the CDPSHJ in different poses in terms of stiffness, the authors need to develop stiffness indices based on the stiffness matrix. But the previous Cartesian stiffness matrix equation (18) is inhomogeneous, namely
The matrix needs to be homogenized first, as it is not possible to directly derive the stiffness indices. The authors adopt the method introduced in previous studies,34,47 which partitions a unit-inconsistent matrix into homogeneous translational and rotational components.
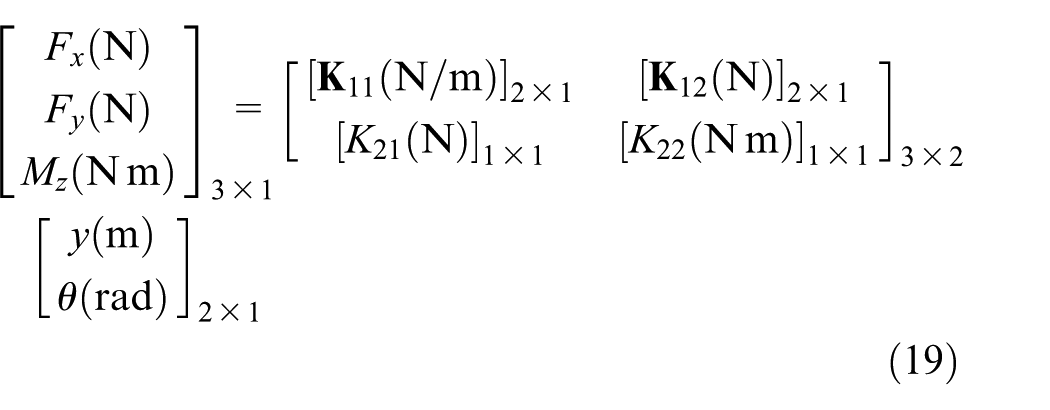
Equation (19) can be decomposed as


Let


where
λt
1 and λt2 are the eigenvectors of

Numerical results of CDPSHJ stiffness adjustment
Simulation studies are performed with the software MATLAB 2016. Before illustrating the CDPSHJ stiffness adjustment, the following conditions should be satisfied.
Wrench-feasible condition

Wrench-set condition
The cable mechanism is able to sustain a specified set of external wrenches. In this article, four different load cases, denoted by L1–L4 in Table 1, will be considered.
External wrench conditions.

Cable-length condition

Translational-constraint condition
It is known from equation (1) that the translation motion along the X-axis is limited by (y, θ). Meanwhile, structural size of CDPSHJ restricts the translation motion. Hence

In consideration of the CDPSHJ toward WMRM’s elbow joint, the values of the various maximum and minimum limits, in arbitrary units, corresponding to those required in inequalities equations (25)–(27) as used for all numerical examples are given in Table 2.
Numerical values of limits.

Before illustrating the effects of the CDPSHJ variable stiffness adjustment, cable and spring parameters must be specified. For the cable actuators, 6 × 7 wire rope is considered. According to the method utilized by Anson et al., 34 the stiffness of the ith cable is formulated as

where the modulus of elasticity of the cable E is 68 GPa, the cross-sectional area of the cable AC is 131.88 mm2, and the length of the actuating winch lcw is 30 mm, which is assumed to be constant. Diameter of steel wire dw is 2 mm. The spring is made of carbon steel. Elastic modulus of spring Es is 196 GPa, Young’s modulus G is 78.5 GPa, diameter of spring wire ds is 5 mm, pitch diameter of the spring D is 40 mm, initial height of the compression spring l0 is 105 mm, active coil number of the compression spring n0 is 8, and spring constant K is 23,840 N/m. The spring bending stiffness β satisfies the following relationship 41

where l is the compressed length of the spring and β0 is the initial bending stiffness of the spring. Since the spring is treated as an elastic beam of variable length and has large deformation, it is assumed that
Translation motion and stiffness adjustment
As shown in Figure 2(a), rigid shaft 1 passes through the upper platform, forming the series part, so the CDPSHJ stiffness is adjusted through the translation motion. Once the cable is selected, according to equation (18), the stiffness adjustment mainly involves adjusting the tension of the driving cable

CDPSHJ variable stiffness at θ = −58°, a = b = 0.05 m, d = 0.04 m: (a) kt, kr at L1; (b) f, T1, T2 at L1, (c) kt, kr at L2, (d) f, T1, T2 at L2, (e) kt, kr at L3, (f) f, T1, T2 at L3, (g) kt, kr at L4, and (h) f, T1, T2 at L4.
From Figure 5, the joint translational stiffness is always smaller than rotational stiffness. The joint stiffness adjustment range and cable tensions T1 and T2 are affected by external loads. But when the CDPSHJ pose is the same at L1, L2, L3, and L4, the stiffness values are all the same and not affected by external loads. All the maximum values are at y = 0.072 m. In other words, at L2, L3, and L4, respectively, the stiffness range is the subset of the stiffness set at L1.
Structural parameters (a, b, d) on stiffness adjustment
The last section indicates that once structural parameters are decided, the joint stiffness is adjusted by translation motion when the joint is at an angle, but the stiffness values are all the same and not affected by external loads. However, if structural parameters (a, b, and d) change, the stiffness values change. This can be proved by equation (18). That is to say, in order to maximize CDPSHJ stiffness, reconfigure the system. Namely
max (min (f (a, b, d)))
subject to 0.035 m ≤ a ≤0.08 m, 0.035 m ≤ b ≤ 0.08 m, 0.025 m ≤ d ≤ 0.055 m.
Other parameters are listed in Tables 1 and 2. Due to the space limitation, this section only analyzes the effects of structural parameters on stiffness adjustment under L1 and L2. Here, a × b × d is discretized into n × n × n points. Traverse n × n points of (a, b) to figure out the f (a, b, d) corresponding to d (n points), as shown in Figure 6. The numerical analysis is performed with MATLAB at n = 5. Figure 6 shows f (a, b, d) when a × b × d is traversed at L1 and L2. There should be 25 curves in Figure 6(a) and (b). The maximum target value falls on curves 1 and 2. At L1 in Figure 6(a), f (a, b, d) is the maximum at d = 0.055 m, a = 0.035, and b = 0.08 m. At L2 from Figure 6(b), f (a, b, d) is the maximum at d = 0.0448 m, a = 0.0575, and b = 0.035 m. In future work, the optimization design of CDPSHJ should be multi-objective, taking f (a, b, d) into account in addition to the effects of workspace.
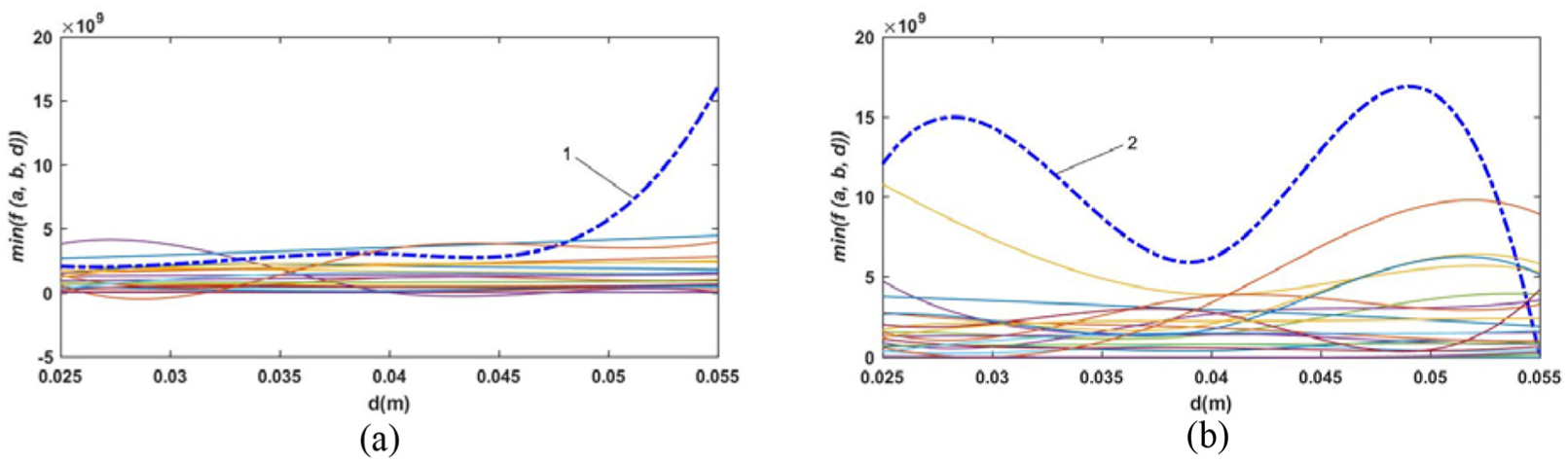
f (a, b, d) at traversing a × b × d at L1, L2: (a) f (a, b, d) at L1 and (b) f (a, b, d) at L2.
Bending and compression spring on stiffness adjustment
As the spring is an elastic beam, the effects of axial elongation and shear are negligible. This section discusses that the spring flexural rigidity is on CDPSHJ stiffness due to bending and compression. According to equation (29), 41 once the spring is selected, the spring bending stiffness β is only relevant for the spring compressed length l.
In this article, it is assumed that

β approaching (y, θ) limit at a = b = 0.05 m and d = 0.04 m: (a) β at L1, (b) β at L2, (c) β at L3, and (d) β at L4.

β and CDPSHJ stiffness f at a = b = 0.05 m and d = 0.04 m: (a) β, f at θ = −58° at L1; (b) β, f at y = 0.085 m at L1; (c) β, f at θ = −58° at L2; (d) β, f at y = 0.085 m at L2; (e) β, f at θ = −58° at L3; (f) β, f at y = 0.085 m at L3, (g) β, f at θ = −58° at L4; and (h) β, f at y = 0.085 m at L4.
Conclusion
This article proposes the CDPSHJ for WMAMs, aiming to analyze the stiffness adjustability. After introducing the elbow joint concept, kinematic analysis of the joint is carried out to calculate the velocity Jacobian matrix. Then, the cable tension is analyzed through static modeling. Finally, stiffness adjustment analysis is carried out in four different load cases with MATLAB. The linear helical compression spring provides the nonlinear stiffness feature under the bending and compression effects. The CDPSHJ stiffness adjustment can be achieved either by translational motion of the upper plate or adjustment of the bending angle, and the stiffness values are not affected by external loads, but affected by structural parameters (a, b, and d). Featured with stiffness adjustability, large workspace, and light structure, the proposed CDPSHJ proves to be of great potential use for WMRMs. The future work will address the effects of different parameters of the spring on the CDPSHJ workspace and stiffness, develop the shoulder and wrist joints (three or four cables driven) of the anthropopathic manipulator, and make experiments on joints, including elbow, shoulder and wrist joints, and the manipulator.
Footnotes
Handling Editor: Roslinda Nazar
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation (NSF) of China (51275152) and NSF of Hebei Province (2018202114).