
Abstract
Currently, signal control mode is the main control method of urban road intersections. Given that the traffic efficiency of road intersections is mainly affected by signal timing schemes, it is important to optimize signal timing at road intersections. Therefore, signal timing optimization methods of urban road intersections are explored in this work. When optimizing the timing of the signal at the intersections, the selection of optimization targets play an important role. At present, there are multiple objectives considered while designing signal timing scheme, including capacity, delays, and automobile exhaust. However, from the perspective of the traveler, they are more concerned about their own delay while passing intersections. In this work, we propose a novel multi-objective signal timing optimization model with goals of per capita delay, vehicle emissions, and intersection capacity. Considering the problem characteristics of the target problem, a meta-heuristic algorithm combining difference operator, which is based on Particle Swarm Optimization Algorithm, is developed. To test the validity of proposed approach, we applied it to real-world intersection signal timing problems in China. The results show that the optimized signal timing scheme obtained by the proposed algorithm is better than the realistic one. Also, the effectiveness of the developed algorithm is demonstrated by comparing it with other efficient algorithms.
Introduction
Intersections are the key nodes in urban road network. There are many control forms for different types of road intersections. 1 The traffic efficiency of intersections may be affected by the control types. 2 At present, adaptive control, inductive control, and signal control are three main control methods, and signal control is still the main control mode of intersections; thus, designing a reasonable signal timing scheme is crucial to intersections.3,4 Signal timing is used to determine the best phase time for intersections. Many signal timing methods have been widely used, for example, Webster model, ARRB model, and HCM2000.5,6 Usually, the signal timing design is based on the minimum total delay of the vehicle passing through the intersection. In practice, intersection traffic efficiency is influenced by many factors, for example, pedestrians and non-motor vehicle, among others.7,8 To address this issue, researchers have proposed many signal timing approaches with multi-objective. 9
For isolate intersection under oversaturated conditions, Li et al. 10 formulated an optimization model, in which maximum capacity and minimum queue length were taken as the optimization objectives. Jiao et al. 11 established a mathematical model to find the optimal signal timing schemes of intersection, and the model can apply to real-time traffic signal control system. Based on fuzzy logic, Schmöcker et al. 12 provided an approach to solve signal control, and the effectiveness of the approach was certified by a case application. Considering three factors, that is, mobility, safety, and environment, a methodology of signal timing was developed by Stevanovic et al. 13 Chen et al. 14 proposed a mathematical model, in which traveler delay, stops times, and capacity were taken into account, and an algorithm was designed for solving the proposed model. Lertworawanich et al. 15 presented a new methodology for oversaturated networks to optimize the signal timing controls. Overflow, delays, and maximum capacity of intersections were selected as the optimization objectives. In previous works, many scholars have studied the intersection signal optimization problem and proposed many optimization models. However, researchers rarely consider the travel own delays while building a model. No researcher has built a model with three goals that simultaneously include per capita delay, vehicle emissions, and intersection capacity. In this study, a multi-objective optimization model with the goals of per capita delay, vehicle emission, and capacity was established.
For the multi-objective optimization problem of signal timing, some heuristic or metaheuristic methods were adopted to deal with it, for example, simulated annealing (SA) algorithm, genetic algorithm (GA), and differential evolution (DE) algorithm. Mihăiţă et al. 16 and Yu et al. 17 proposed a nonlinear programming model to solve the signal timing problem, and presented a heuristic GA to solve the proposed model. In order to solve pedestrian phase patterns, a GA was proposed to obtain solutions for signal settings by Ma et al. 18 Sabar et al. 19 developed a memetic algorithm to optimize signal timings and solve traffic signal optimization problems. The algorithm adopted a local search algorithm to improve the exploitation power of GA. To collaborate intersection signal control and traffic flow, Sun et al. 20 established a tri-level programming model, and non-dominated sorting genetic algorithm II (NSGA II) was applied to solve phase. In this article, a meta-heuristic approach combining difference operator, based on Particle Swarm Optimization (PSO) Algorithm, is developed. 21 In terms of solution algorithms, researchers have mainly focused on improving the algorithm performance, and few people make works optimized the screening of Pareto solutions. In this work, we make three contributions: (1) propose a signal timing optimization model with the goals of per capita delay, vehicle emission, and capacity; (2) in order to solve a multi-objective signal timing optimization problem, an improved Particle Swarm Optimization Algorithm (IPSO), which combines DE algorithm and PSO algorithm, is proposed; and (3) a dynamic relaxation strategy, which improves convergence and ensures the uniformity of solution set distribution, is proposed. The algorithm is compared with the currently used traffic signal control strategies, and the results show that the algorithm has better control effect. The comparisons and discussions show the competitiveness of the proposed model and meta-heuristic.
The remainder of this article is organized as follows: “Problem statement” section draws a signal timing optimization problem of intersections and develops its mathematical model. “The proposed algorithm” section proposes an efficient meta-heuristic based on PSO algorithm. “Results and discussion” section is devoted to a computational study of the proposed approach by using a case. Finally, “Conclusion” section summarizes our findings and gives some research suggestions for future study.
Problem statement
Intersection signal timing involves determining a series of ordered phases and signal time lengths. Generally, some objectives are used to measure the traffic effectiveness of intersections, such as capacity, vehicle delay, the number of parking, parking rate, queue length, and travel time. With the aggravation of automobile exhaust pollution, environmental factors, such as vehicle emissions and vehicle energy consumption, are introduced by some people when designing a signal timing for intersections. 22 Different objectives reflect different goal of intersection signal control. 23 At present, the signal timing methods considering only the total vehicle delay have gradually lost recognition. 24 Many researchers constructed multi-objective mathematical models to obtain the better signal schemes. However, to the best of our knowledge, there are few papers reported to consider per capita delay and vehicle emission simultaneously. In addition, multi-objective optimization problem for intersection signal timing can regard as NP-complete. 25 This makes it a complex combinatorial optimization problem. Thus, multi-objective optimization problem for intersection signal timing is more challenging. At present, the signal timing methods only considering the total vehicle delay have gradually lost recognition. 26 Thus, we considered the per capita delay as one of the optimization objectives as well as presented a new per capita delay model that can better describe per capita delay. Different objectives reflect different goals of intersection signal control. The main purpose of signal optimization is to improve the capacity of intersections, which means the intersection capacity must be maintained to traffic requirement. The increase in vehicle exhaust pollution has made us realize that we must balance environmental pollution when ensuring the capacity of intersections. Since the vehicle emission objective is considered, for the first time, we proposed a novel multi-objective signal timing optimization model that contains the above three targets and embodies the most urgent problem to solve while optimizing intersection signal timing.
Constraints of the model
Cycle time constraint
The sum of the green time and the loss time of each phase should be equal to the cycle time. The formula is expressed as:

Minimum green time constraint
In general, the minimum green time is the shortest passing time of pedestrians at the intersection, and the minimum green time depends on the intersection design and pedestrian walking speed. The minimal value is given here, which can be expressed as:

Cycle length constraint
If cycle time is too short, it will affect vehicles passing the intersections, and it will increase the delay of vehicles if it is too long. Considering the rationality of signal timing, the cycle time is restricted to a range. The constraint can be written as:

The mathematical model
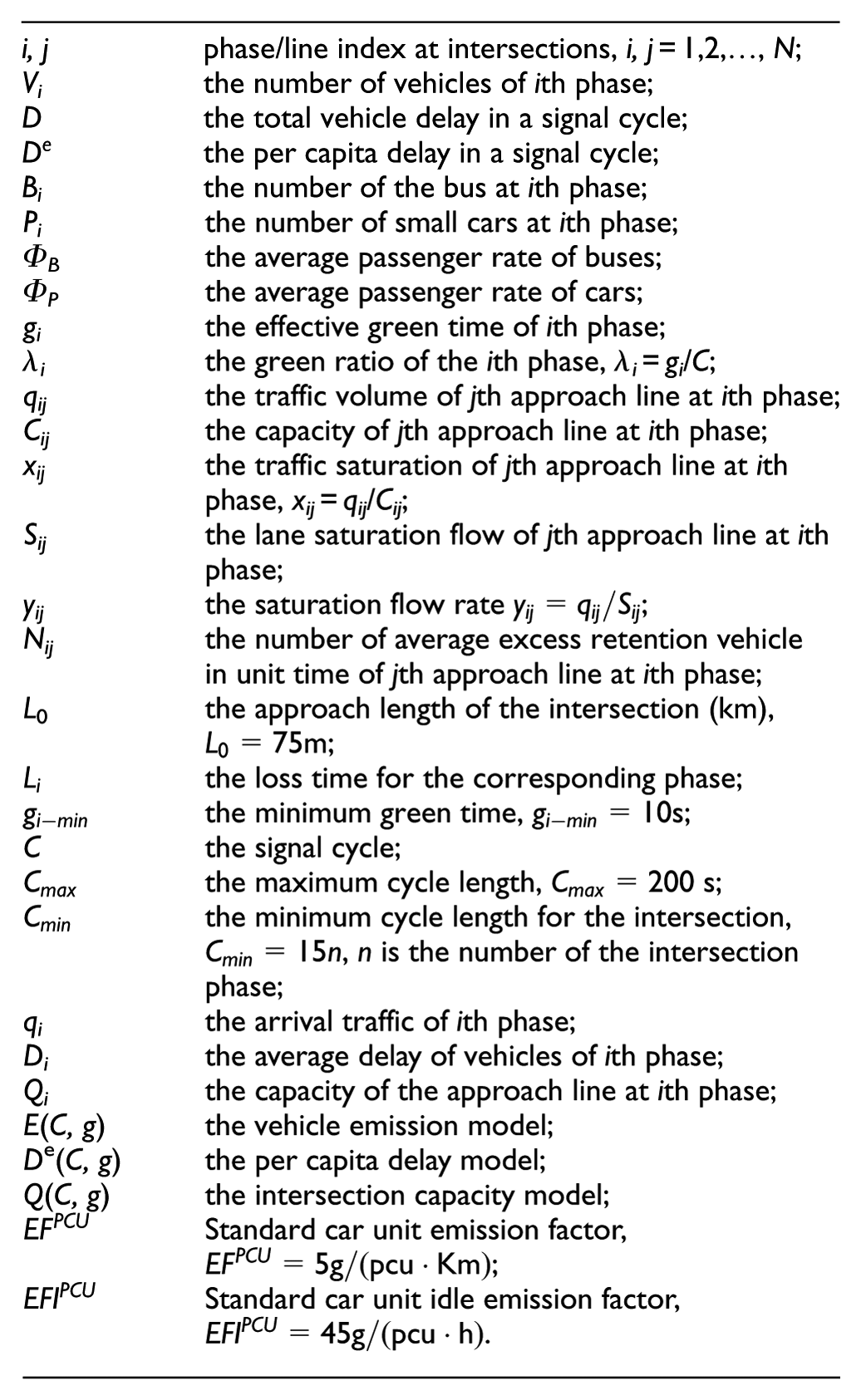
The notations used in our model are shown as follows:
Delay model
In this work, the per capita delay is adopted as the optimization objective of intersection delay, which can be written as:


where Di is the average delay of each vehicle at ith phase. The ARRB model is used to obtain Di, 27 which can be written as:


Traffic capacity
The capacity of intersection equals to the sum of each phase capacity, which can be written as:


where Q represents the capacity of the intersection.
Vehicle emission model
The main pollutants of motor vehicle exhaust emission include carbon monoxide, hydrocarbons, and nitrogen oxides, in which the proportion of carbon monoxide, nitrogen oxides, and hydrocarbons is 70%, 15%, and 15%, respectively.28,29 Thus, the vehicle emission is represented by carbon monoxide (CO). 30 The CO calculation is formulated as:

Multi-objective optimization model
By considering the optimal Pareto solutions under multiple constraints, we formulate a mathematical programming model which can be written as:


where negative expression symbol before
The proposed algorithm
PSO is a population-based stochastic optimization technique proposed by Kennedy and Eberhart. 31 PSO is inspired by mimics of the swarm behavior of insects, beasts, birds, and fish. These swarms search for food in a cooperative way, in which each member of the swarm changes its search pattern by learning from its own and other members’ experience. At present, PSO algorithm has been widely used in optimization problems in various fields due to its good optimization ability. DE algorithm is an efficient global optimization algorithm, which is a group-based heuristic search algorithm. 32 Each individual in the group corresponds to a solution vector. The basic idea of the algorithm is to generate a new individual by summing the vector difference between any two individuals in the population and the third individual, and then compare the new individual with the corresponding individual in the contemporary population to choose the better one. In order to utilize the advantages of the two algorithms, an IPSO is proposed to handle the signal timing problem in this section. The improved PSO is combined with DE operator for population update, and a dynamic relaxation strategy is introduced for ensuring the uniformity of solution set distribution.33,34 Figure 1 describes the main process of the proposed algorithm. More detailed descriptions are given as follows.

Flowchart of IPSO.
Solution encoding and initialization
Designing an effective encoding method plays an important role in metaheuristic algorithm, which decides how to perform solutions and provides more information. Moreover, a good solution performance can simplify decoding process and decrease algorithm running time. In our algorithm, an integer encoding was adopted for individual coding, where an individual expressed by coding is X = (C, g1, g2, g3, …, gn). X represents the signal timing scheme, in which each element corresponds to signal cycle or green time, that is, C; g represents the signal cycle, green time, respectively. Thus, we can obtain the initial population, where initial population is expressed as:

Population update
The basic PSO algorithm produces new particles by using speed and position update of each particle. In the proposed algorithm, the hybrid difference operator is used to update individuals, which combines differential operator and inertia weight. The hybrid difference operator is formulated as:

where

where
Relaxation domination strategy
The method can provide sufficient signal timing schemes for the intersection. However, how to gain Pareto frontier fast plays a key role in evolutionary multi-objective optimization. Based on the Pareto dominance relation, we can compare the two solutions by using the dominant information.35,36 In this study, many similar signal timing schemes are obtained through the basic domination relations. In order to improve convergence and ensure the uniformity of solution set distribution, a dynamic relaxation strategy is proposed, in which dynamic relaxation factor is used to relax the basic domination relation. Dynamic relaxation factor is formulated as:


where m = 1,2,…, M; l = 1,2,…, Num;
Results and discussion
Case design
To check the efficiency of the proposed algorithm, the algorithm is applied to a simple four-way intersection in Jinzhou, China. The layout of intersection is shown in Figure 2.

Intersection geometry.
The intersection has four phases; phase diagram is shown in Table 1. After investigation, the traffic volume of intersection is shown in Table 2, and figures in brackets denote the number of lanes. The single lane saturation flow rate of vehicle is 1200 veh/h in this study.
Intersection signal phase diagram.



Traffic volumes of the intersection.

Analysis of calculating results
The proposed algorithm is implemented in MATLAB R2012a and runs on an AMD E2-3000M APU (1.80 GHz/4.00G RAM) PC with a Windows 7 operating system. In the proposed algorithm, the size of archive set is set to 10, that is, the number of Pareto frontier which can be got in each run is 10. The Pareto solutions are shown in Table 3 in the four runs. The first column denotes the runs, and the second column shows the Pareto optimal solutions corresponding to each run. The third one is the signal timing plans. The next three columns show f1 (per capita delay), f2 (capacity), and f3 (vehicle CO emission) values of the Pareto solutions, respectively. The seventh column provides the computational time for getting the solutions.
Produced Pareto solutions of the proposed algorithm.

Figure 3 shows space distribution of Pareto solutions in the four runs. From Figure 3, we can know Pareto solutions is highly similar in four runs, which denotes that the presented algorithm performance is stable. Table 4 shows the comparison results with the realistic signal timing schemes. The proposed algorithm scheme is selected from Table 3 to make an intuitive contrast, and it just is a representative of the Pareto solution. From Table 3, we can know that the range of values worth of f1, f2, and f3 are stable in an interval, that is, f1 ∈ [70–80], f2 ∈ [4550–4750], and f3 ∈ [11,800–11,899]. From Table 3 and Table 4, it can be seen that the vehicle emission and the per capita delay are decreased to a certain extent compared with the existing timing scheme in a signal cycle. In addition, the total capacity decreases slightly due to the decrease of the signal cycle.

Space distribution of Pareto solutions.
Comparison results between proposed method and current signal scheme.

To further illustrate the effectiveness of the algorithm, we executed NSGA-II and genetic algorithm direct search toolbox (GADST) for the case. 37 The GADST is the GA toolbox which included a gamultiobj function for solving the multi-objective optimization. The compared results between three algorithms of different Popsize (population size) and gmax (the maximum iteration count) are given in Table 5. It is noted that the size of Pareto frontier is 10 in three different algorithms. The last column lists the evaluation index of Pareto frontier spatial distribution which is designed to show the diversity of Pareto solution set. 38 Evaluation index is formulated as

where
Comparison results in different algorithms.

IPSO: improved Particle Swarm Optimization; NSGA-II: non-dominated sorting genetic algorithm II.
From Table 5, the following conclusions can be obtained that refer to running time and S values in the algorithms.
The diversity and uniformity solutions of the Pareto solution obtained from the proposed algorithm is better than NSGA-II and GADST;
The computational time of our algorithm is superior to GADST and NSGA-II under the same hardware environment.
Based the above case analysis, the proposed algorithm is workable and efficient to deal with a signal timing optimization problem for urban road intersections.
Conclusion
This work studies a multi-objective optimization issue of intersection signal timing schemes design and established a mathematics model for it. In the proposed model, per capita delay, traffic capacity, and vehicle emissions as optimization goals are presented. An efficient meta-heuristic based on PSO is proposed to handle the model. To cope with the diversity of algorithm and the uniformity of archive set, a difference operator and a dynamic relaxation strategy are developed. The algorithm is tested by using an actual case, and the results show that the presented algorithm can obtain signal timing schemes. The performance is superior to the current signal scheme obviously. In addition, the effectiveness of the proposed algorithm was verified by comparing it with GADST and NSGA-II, and the optimal/near optimal Pareto solution can be obtained in reasonable time. In this work, the traffic situation of urban road intersections will have a significant improvement by applying this method. In this approach, traffic emission issues and traffic control strategies are combined, which can provide technical support for improving the service level of the entire road transportation system and promote the sustainable development of urban transportation.
Despite the good performance of the developed approach been certified, some limitations are existing. This article only studies the regular traffic flow, and mixed traffic flow may need to be taken into consideration. Besides, the algorithm needs to be further applied for a vehicle road collaborative environment. All of them are future efforts for us.
Footnotes
Handling Editor: Yanyong Guo
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Science Technology Development Project of Jilin Province (Grant No. 20190303124SF) and Graduate Innovation Fund of Jilin University (Grant No. 101832018C004).