
Abstract
Instability caused by emergency braking and steering during ambulance operation would easily lead to a sharp rise of blood pressure in patient’s head, which would further cause a secondary injury to the patient. Furthermore, the vibration generated by uneven road would result in patient’s nausea and deterioration of patient’s condition. This article proposes a pitch–roll-interconnected hydro-pneumatic suspension system which can achieve the resistance control for pitch, roll, and bounce modes of ambulances to improve the stability and attenuate the vibration for the lying patients. The ambulance with pitch–roll-interconnected hydro-pneumatic suspension is characterized by 7 degrees of freedom dynamic model, in which the characteristics of pitch–roll-interconnected hydro-pneumatic suspension are explicitly formulized using hydrodynamic equation derivation. A motion-mode energy spectral density method is proposed to decouple the vibration energy for bounce, pitch, and roll modes in frequency domain. Subsequently, the parameter design approach incorporated with the suspension characteristic equations and motion-mode energy spectral density method is also presented to optimize the lying patient’s ride comfort and ambulance’s handling stability. The numerical simulation results show that the proposed pitch–roll-interconnected hydro-pneumatic suspension system can simultaneously provide pitch–roll–stiffness and damping without generating additional bounce-stiffness, resulting in superior ride comfort and handling stability compared to the conventional suspension.
Introduction
Ambulances are important in transporting injured patients as well as providing first aid to patients. The vibration and instability of an ambulance would easily result in patient’s nausea, deterioration of patient’s condition, and possible death. Patients are particularly sensitive to even tiny intensity of vibration.1–3 When the ambulances are in operation, vibration in the lateral direction, due to the curves, would make the emergency care not easy to operate for the paramedic and even cause trauma to patient. Moreover, the subsequent pitch motion due to frequently brake and start will generate negative foot-to-head acceleration in the lying patient, which would result in side effect, such as rapid shifting the blood to the head, reduction of venous return, and the rise of the patient’s blood pressure. 4 In order to attenuate these vibrations for lying patients, studies have focused on the suspension system of stretcher and the suspension system of vehicle body.5–8
So far, a limited number of studies have been carried out for the suspension system of stretcher, involving passive, semi-active, and active techniques. For instance, Yang and colleagues9–11 presented a nonlinear vibration reduction stretcher system for tracked ambulance. Xu et al. 12 optimized the damping characteristic of stretchers on emergency ambulance. Pan and Zhang. 13 also investigated vibration isolation performance of ambulance stretcher. Prehn et al. 14 researched the vibration and sound levels during infant transport and provided reliable improvement means. For semi-active and active system, Raine and Henderson 15 investigated a semi-active pneumatic damper suspension for stretcher. Sagawa and Inooka 16 carried a research on the ride quality of an actively controlled stretcher system to improve the lying patient’s blood pressure variation. These studies focused on the vibration mitigation of patients lying on the stretcher and, however, did not address the issue of the vibration and stability from the perspective of paramedic. Chae and Choi 17 proposed a vibration isolation bed stage with magnetorheological dampers, which can control the vibration in the stretcher as well as vibration of the seat for the paramedic. The drawbacks of this vibration isolation system, such as structural complexity and inconvenience of operation, limit its application. Actually, the simple stretcher’s structure without suspension system is still very popular in practical applications due to its convenient operation during the patient transportation.
An alternative way to improve lying patient’s ride quality is to design a specific suspension system of vehicle body. The advanced suspension system will enhance ride comfort and handling stability for both lying patients and paramedics. Generally, ambulances are conventionally converted from a truck or van. Their passive suspensions, though adequate for the original vehicle, are unable to meet the driving requirement of the ambulance. Semi-active and active suspensions have been adopted to improve overall dynamic performance for both handling and ride comfort,18–21 while the passive suspensions are still widely used due to inevitable limits of these semi-active/active suspensions, such as increased cost, uncertain reliability, power consumption, and inherent complexity.22,23 The conventional suspension (CS) with anti-roll bars (ARBs) can improve the roll stability, while the ride comfort would be deteriorated as well. 24 Some advanced passive suspension systems also have been reported to enhance overall performance for both handling and ride comfort. Wu and Zhang 25 presented a kinetic dynamic suspension system which can improve handling and road holding. Cao et al. 26 investigated the dynamic characteristics of pitch-interconnected hydro-pneumatic suspension, which indicated that the proposed suspension could provide significant benefits for improving both handling and ride qualities. Zhang et al. 27 proposed a roll/pitch plane hydraulically interconnected suspension (HIS) to improve roll-/pitch-resistant performance without sacrificing ride comfort. Moreover, parameters optimization and sensitivity analysis were also studied for the HIS.28,29 Ding et al. 30 proposed a roll-resistant HIS for tri-axle straight trucks, and design methodology for parameters of the HIS was also presented.
Most of the previous studies have focused on adopting various interconnected schemes to improved harmony between ride comfort and roll/pitch dynamic performance and did not involve the performance harmony among the ride comfort, roll, and pitch dynamics. For ambulances, ride comfort, roll- and pitch-resistant performance requirements are more demanding than passenger cars. However, there are only a few existing studies on both roll–pitch dynamics. For instance, Tan and Shao superficially studied the dynamic characteristic of vehicle with pitch–roll-resistant HIS system.31,32 Particularly, the roll-resistant moment and pitch-resistant moments of the pitch–roll-resistant HIS are coupled together and there is a trade off among ride comfort, roll, and pitch dynamics. For example, the optimal roll-resistant performance of the vehicle is usually accompanied with excessive pitch-resistant moment, which would decrease the ride comfort of the vehicle. 31 On the other hand, increasing the ride comfort would reduce the roll- and pitch-resistant performance. Therefore, the ride comfort, roll resistance, and pitch resistance trade off analysis and parameter design approach for pitch–roll-interconnected hydro-pneumatic suspension (PR-IHPS) are conducted in this work to balance these characters to achieve an overall optimal performance of the ambulance.
Motivated by the aforementioned discussion, this study presents a PR-IHPS system to improve stability and attenuate vibration for both lying patients and paramedics. This new suspension system can achieve enhanced cooperative control of the bounce and pitch/roll motion-modes for the ambulance. The key for improving comprehensive dynamic performance is to properly assign the bounce, pitch, and roll mode-stiffness by parameter design of PR-IHPS system. The main contributions of this article can be summarized as follows:
The suspension characteristics of the proposed PR-IHPS system are explicitly formulized through transfer matrix method and, furthermore, the stiffness and damping generated by PR-IHPS are analyzed quantitatively.
Based on the suspension characteristic analysis, the dynamic characteristics between the pitch and roll modes provided by PR-IHPS are coupled. The motion-mode energy spectral density (MESD) method is developed to decouple the vibration energy for the bounce, pitch, and roll modes in frequency domain. Then, the MESD of the decoupled modes can be obtained with different physical parameters (i.e. capacity of accumulator and pressure loss coefficient of damper valve) of PR-IHPS.
The parameter design approach of PR-IHPS is proposed with riding and handling performance evaluation indexes (i.e. sprung mass acceleration, suspension work space, tire dynamic force, and MESD). This design procedure incorporates with the suspension characteristic equations and MESD method, so that the proposed PR-IHPS system can effectively improve the ride quality for both patients and paramedics.
The paper is organized as follows. In section “Ambulance model with PR-IHPS,” the ambulance with pitch-roll-interconnected hydro-pneumatic suspension (APR-IHPS) model is developed. Based on this model, the additional characteristics by APR-IHPS are discussed as shown in section “Characteristic analysis of PR-IHPS system.” In section “MESD method,” the MESD method for obtaining the vibration energy of each motion-mode in frequency domain is proposed, and then the equations of solving MESD of APR-IHPS are derived. Moreover, the parameter design approach for PR-IHPS system as introduced in section “Parameter design approach of PR-IHPS system.” The simulation results and discussions are shown in section “Results and discussions.” Finally, conclusions and further work are summarized in section “Conclusion.”
Ambulance model with PR-IHPS
A 7 degrees of freedom (DOFs) ambulance model comprising a lumped sprung mass and four unsprung masses is developed, as shown in Figure 1. The sprung mass includes 3 DOFs which are translational DOF in the vertical direction, and rotational DOF in pitch and roll plane. Each lumped unsprung mass have 1 DOF which is translational freedom of motion in the vertical direction. To simplify the motion-model, the CS system is characterized by four linear spring and four viscous damping, and front and rear ARBs mounted between the sprung mass and unsprung mass are characterized by linear torsional spring. In addition, four tires are modeled using four linear springs.

Schematic of a 7 DOF ambulance model: (a) rear view and (b) side view.
In this study, a PR-IHPS system is proposed to replace front and rear ARBs to suppress pitch and roll motion of sprung mass, as schematically shown in Figure 2. In the system, actuators, described by double-acting hydraulic cylinders, are assembled between the sprung mass and unsprung mass. The diagonal hydraulic cylinders are cross-connected each other. When the ambulance turns left, positive roll motion of the sprung mass occurs, left two double-acting hydraulic cylinders are expanded while right two double-acting hydraulic cylinders are compressed. At this point, hydraulic fluid in circuits I and IV (see Figure 2) are lowly pressurized while ones in circuits II and III are highly pressurized, which together provide a roll restoring moment to prevent the roll motion of sprung mass relative to unsprung mass. Similarly, when the ambulance turns right, the proposed PR-IHPS system can also provide a reversed roll restoring moment. The pitch motion of the sprung mass, caused by emergency braking or abrupt acceleration, has the same fundamental as the roll motion of the sprung mass, and the PR-IHPS system can also provide a pitch restoring moment. In a word, the roll and pitch motion-mode stiffness can be increased by the proposed PR-IHPS system. In terms of bounce and articulation motion-modes, compression and extension of the hydraulic cylinders would make hydraulic fluid in circuits flow into extension chamber from compression chamber, which makes the fluid pressure almost unchanged. It means that the PR-IHPS system can only provide additional damping forces, but additional stiffness is scarcely offered in both bounce and articulation modes.

A schematic of PR-IHPS system.
Equations for vehicle
The equations of motion for the vehicle model can be derived, in which the hydraulic forces are regarded as external forces

where

Equations for PR-IHPS system
N Zhang 27 proposed a transfer matrix method to develop the equations of the fluid subsystem, and this method is employed for the modeling of PR-IHPS system. Each fluid circuit is made up of one nitrogen-filled diaphragm accumulator, one three-way junction, three damper valves, and a few fluid pipelines components, as illustrated in Figure 2. Thus, the relationship between flow and pressure in the circuit can be determined by a sequence of multiplications of the involved fluid component impedance matrices

The fluid element lumped-parameter model is applied to these components. Therefore, the hydrodynamic equations of pipeline fluid element can be expressed as

where
For the damper valve and accumulator with the three-way junction and damper valve (ATJDV) components, the hydrodynamic equations can be written as


where
Substituting equations (5)–(7) into equation (3), and expanding the expressions to all circuits, the relationship between pressure and flow can be rewritten as

where

Boundary equations for the vehicle and PR-IHPS
The relative motion between the piston head and rod cylinder results in the change of volume flow in the cylinder chambers, and vice versa. The interaction between the relative motion and volume flow rate forms the coupled boundary for conventional ambulance and PR-IHPS system. It should be noted that the compression of the fluid and the cross-line leakage in the cylinder chambers can be ignored for small-amplitude oscillations under low pressure. Therefore, the interaction can be described as
Integrated equations for ambulance with PR-IHPS
Based on equations (1), (8), and (10), the integrated equations can be written as

The impedance matrix

Then, equation (12) can be expressed in state-space form as

where

Characteristic analysis of PR-IHPS system
Based on additional characteristic matrix

The second and third terms on the right of equation represent the additional damping and stiffness characteristics by the PR-IHPS system, respectively. Based on these matrixes, the stiffness and damping characteristics of PR-IHPS will be explicitly described in next sections.
Stiffness characteristic
The stiffness characteristic matrix

where



where
Equation (16) clearly shows that the additional stiffness is inversely proportional to sum of liquid capacitance and accumulator’s capacity and also depends on the cross-sectional areas. Further investigation of equation (17) can demonstrate that:
The vertical stiffness for sprung mass is determined by vertical area ratio factor
The pitch stiffness and roll stiffness for sprung mass, respectively, depend on the area ratio factor
The motions of front-left wheel and rear-right wheel are intercoupled by area ratio factor
Damping characteristic
The additional damping depends on liquid capacitance of pipeline and loss coefficients of valves. Actually, the liquid resistances resulted from pipelines are much smaller than that produced by damper valves. Thus, only the valve-produced damping is discussed in this section.
The valves can be classified as piston head damper valve (PHDV), piston rod damper valve (PRDV), and accumulator damper valve (ADV), as illustrated in Figure 2. Based on equation (15), the damping matrix
The submatrices



As shown in equation (20), the first item on the right of the equation indicates the additional damping characteristic matrix generated by ADVs. In addition, the second and third items are determined by PHDVs and PRDVs. More details are shown as follows:
Equation (20) clearly shows that the damping characteristic matrix
Equation (22) and (23) indicates that both PHDVs and PRDVs can generate the additional vertical, pitch, and roll motion damping for sprung mass. The motion between the vertical and pitch are coupled by area ratio factor
In sum, the PR-IHPS system can provide the pitch and roll stiffness simultaneously and achieve damping adjustment to the specified motion by changing pressure loss coefficients of damper valves. Remarkably, the pitch and roll stiffness are coupled and depend on the same set of parameters. In order to reasonably design the coupled stiffness and damping, the MESD method is introduced to decoupled the vibration energy of each mode in the next section.
MESD method
A motion-mode energy method has been proposed to quantify the energy contribution of each motion-mode to vehicle dynamics in real time.33,34 In this method, the motion energy of three vehicle body-dominated modes (bounce, pitch, and roll) which contribute most to vehicle ride quality can be described. Based on this method, MESD method is developed to achieve the decomposition of motion-mode energy in the frequency domain. Therefore, the MESD of each motion-mode can be independently obtained using the proposed method, and then the influence of parameters of PR-IHPS system on the MESD can be discovered. This is the key point to design appropriate parameters for PR-IHPS system.
MESD
Based on the theory of random vibration, the motion energy of single DOF in the frequency domain under random road input can be quantified by acceleration power spectral density (PSD) which is defined as

where

where

in which
With respect to equation (13), the eigenvalue matrix

where

where
in which (all, j) and (j, all) are j row and j column of the matrix, respectively.

Substituting equation (29) into equation (30) yields

where

The diagonal elements of


Furthermore, the summation of the energy for each motion-mode is defined as

MESD for APR-IHPS
In order to calculate the MESD of system, the equivalent stiffness of the system and the corresponding elastic deformation in equation (34) must be clear. It is well known that the spring stiffness coefficients in vehicle system depend on a single constant and can be obtained directly by measurement. However, the stiffness generated by PR-IHPS is determined by multiple parameters such as capacity of accumulator, cross-section area of hydraulic cylinder. It is important to obtain the equivalent stiffness of four hydraulic cylinders to calculate the MESD of APR-IHPS.
The four hydraulic cylinder output forces applied on the sprung mass and unsprung mass can be divided into damping force and elastic force using equation (11) as

where




Thus, the equivalent relative deformations of four cylinders are expressed as

Furthermore, the corresponding PSD


in which
Parameter design approach of PR-IHPS system
Performance evaluation indexes
The stiffness/damping characteristic alterations of suspension systems are embodied in the responses of the ambulance subject to random excitations. In this study, the weighted acceleration for recumbent position (WARP), the suspension working space (SWS), and the tire dynamic force (TDF) are adopted to evaluate the dynamic performance of the ambulance. The PSD responses of these indexes can be calculated by equation (25), and then corresponding root mean square (RMS) values (i.e.
Design approach
The design process can be divided into three parts which are hydraulic cylinder sectional area design, equivalent stiffness design, and damping design, as shown in Figure 3. Generally, softer bounce-stiffness is beneficial for improvement of ride comfort because it can reduce the vertical acceleration levels of the sprung mass, while the stiffer stiffness in pitch and roll modes are helpful to enhance handling stability. Based on equation (17), the cross-sectional area of the hydraulic cylinders are the key parameters effecting the stiffness characteristic of the PR-IHPS. Therefore, the hydraulic sectional areas are designed to make both pitch and roll stiffness to be maximum and bounce-stiffness minimum. For this purpose, adjusting the area variables to maximize

Block diagram of parametric design for PR-IHPS system.
Another component that affects the stiffness characteristics is accumulator’s capacity
For the damping design, the objective for the optimization is to minimize the WARP (
Results and discussions
Two models, ambulance with conventional suspension (ACS) and APR-IHPS, are applied to investigate the dynamic performance and motion-mode energy. A set of mechanical and hydraulic parameters used in the two models are presented in Appendix 2.
Dynamic analysis and MESD responses
In order to estimate the dynamic performance, the PSD responses to random excitation inputs are taken into consideration. The comparison between ACS and APR-IHPS is performed under a constant vehicle speed of 50 km/h.
Based on modal analysis, 38 the mode frequencies corresponding to pitch and roll modes significantly increase by 32.26% and 20.89%, respectively, after incorporating the PR-IHPS system, while mode frequency of bounce slightly decreases by 5.17% as shown in Appendix 3. For the articulation mode, the mode frequency remarkably decreases by 27.26%. In addition, the vibration decay rate of each mode is significantly increased. Figure 4 shows the comparison in terms of PSD responses between ACS and APR-IHPS. Obviously, the proposed PR-IHPS system effectively reduces the resonance peak values for the bounce, pitch, and roll motions. These results illustrate that the PR-IHPS system can enhance handling performance without compromising the ride comfort. 27 Particularly, the low articulation modal frequency indicates that PR-IHPS system can improve the road holding ability for an off-road condition. 25

Comparison in terms of acceleration PSD responses: (a) bounce and pitch angular and (b) roll angular.
The MESDs of the vehicle body-dominated modes are shown in Figure 5. The PR-IHPS system significantly reduces the peak values of the MESD response curves, which indicates that the vibration energy is greatly suppressed by PR-IHPS system. The peak frequencies corresponding to MESD curves are consistent with the resonance frequencies of the vehicle body-dominated modes. Furthermore, the comparison of RMS values of the MESD between APR-IHPS and ACS is illustrated in Figure 6. It is noted that the PR-IHPS system can effectively suppress the motion energy of the ambulance.

Comparison in terms of MESDs: (a) bounce and pitch and (b) roll.

Comparison of RMS values of MESD between ACS and APR-IHPS.
As stated above, the PR-IHPS system has the ability to improve the overall operating performance of an ambulance. In order to achieve the optimal overall performance, the key parameters of PR-IHPS system will be analyzed and designed in the next section.
Parametric analysis for PR-IHPS system
Based on the parameter design approach shown in section “Parameter design approach of PR-IHPS system,” the parameters of PR-IHPS system are discussed in terms of the cross-sectional areas, the accumulator’s capacity, and the valves’ loss coefficients.
Cross-sectional areas of hydraulic cylinders
Based on equation (17), the area ratio

The effects of area ratios in terms of
Figure 8 shows the minimum lines with different rear area ratios

The minimum line with different
The capacity of accumulator
In the design of van, there is handling performance index that the suspension system needs to meet, which is the roll angle of sprung mass cannot exceed 2.5° (0.0436 rad) when the lateral acceleration reaches 5 m/s2.
39
In this study, the handling requirement of APR-IHPS is also considered to design the capacity of accumulator. Based on equation (36), the static nonlinear stiffness curves of PR-IHPS system can be obtained as shown in Figure 9. It indicates that the stiffness of PR-IHPS system increases with the decrease of accumulator’s capacity
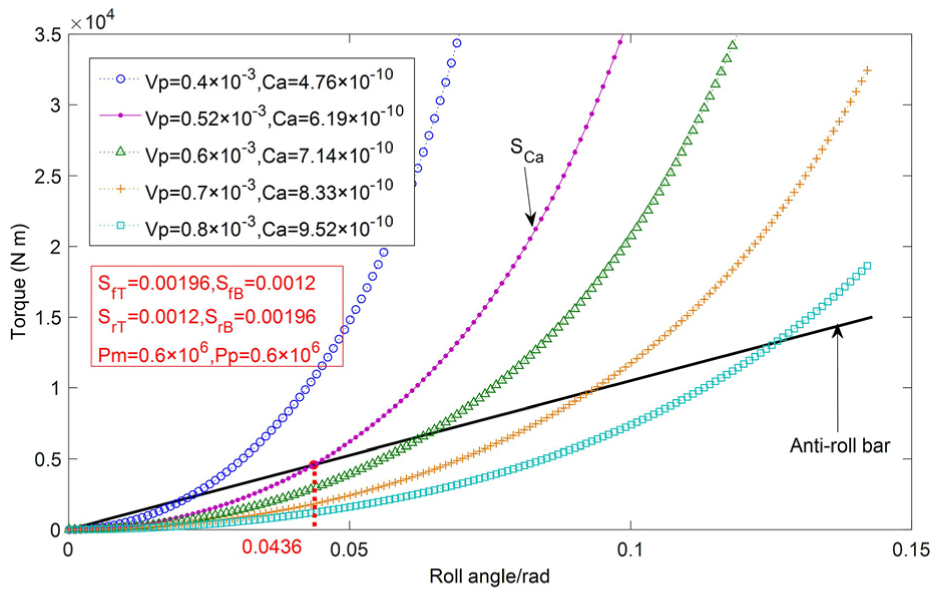
The static stiffness of PR-IHPS.
Figure 10 shows the comparison of MESDs between APR-IHPS and ACS with the change of
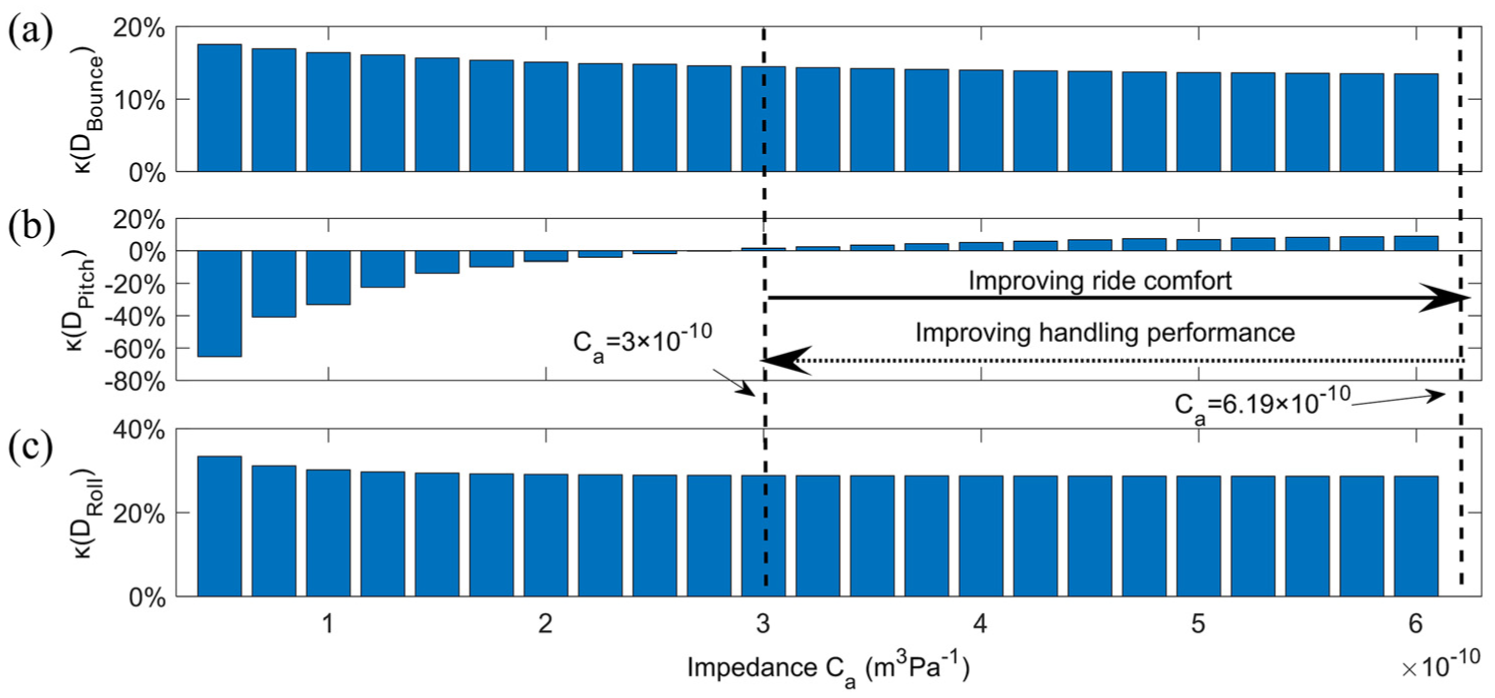
The relative errors of MESDs: (a) bounce, (b) pitch, and (c) roll.
The loss coefficients of damper valves
The effects of the loss coefficients on the MESDs of vehicle body-dominated modes are investigated. The loss coefficient

The effects of
To analysis the loss coefficients

The contour plots with respect to valuation index when ZA = 3.5 × 108 kg s−1 m−4: (a)
Figure 13(a) and (b) shows the contour plots of front SWS index

The contour plots with respect to SWS and TDF when ZA = 3.5 × 108 kg s−1 m−4: (a)
Parameters design results
Based on the parameter design approach described above, the optimal parameter set for PR-IHPS system is obtained, as shown in Table 1. To evaluate the optimization, the performance indexes of the three configurations, ACS, original (unoptimized) APR-IHPS, and optimized APR-IHPS, are compared in Table 2. In addition, the pitch angular displacement (PAD) and roll angular displacement (RAD) of sprung mass are also considered to further evaluate the stability for the lying patient. These indexes are normalized 30 and compared using a radar-type chart, as shown in Figure 14, which indicates that the overall performance of the optimzed APR-IHPS has significantly improved. Most performances indexes of the original APR-IHPS are better than ACS except the ride comfort factor and TDF. The reason for these performance degradation is that the pitch stiffness generated by PR-IHPS system is excessive, so that the acceleration of the sprung mass and the dynamic forces applied on the unsprung masses increases significantly.
The optimized parameter set for the PR-IHPS system.

PR-IHPS: pitch–roll-interconnected hydro-pneumatic suspension.
Comparison of the performance among ACS, original APR-IHPS, and optimized APR-IHPS.

ACS: ambulance with conventional suspension; APR-IHPS: ambulance with pitch-roll-interconnected hydro-pneumatic suspension.

Comparison of the evaluation indexes. The normalization factor
Figure 15 shows that the total motion energy for the optimal APR-IHPS is reduced by 16.58% compared to ACS, which is more than 12.21% of the original APR-IHPS, which indicates that the motion energy can be optimized by the parameter design for the PR-IHPS system. Particularly, the body pitch MESD of optimal APR-IHPS is obviously lower than that of original APR-IHPS, while the other MESD is comparable. These results indicate that the parameters of PR-IHPS are tuned appropriately after parameter optimization, so that all performance indexes are greatly improved. It should be noted that the articulation MESD still remains low after parameter optimization, which indicates that the tires can keep good road holding ability for an off-road condition. In addition, the hydraulic actuator forces are compared to investigate the power consumption of the hydraulic actuator. Figure 16 indicates that the actuator forces after the optimization become much smaller, which corresponds to the fact that the power consumption of the actuator is also optimized.

Comparison of RMS values of MESD.
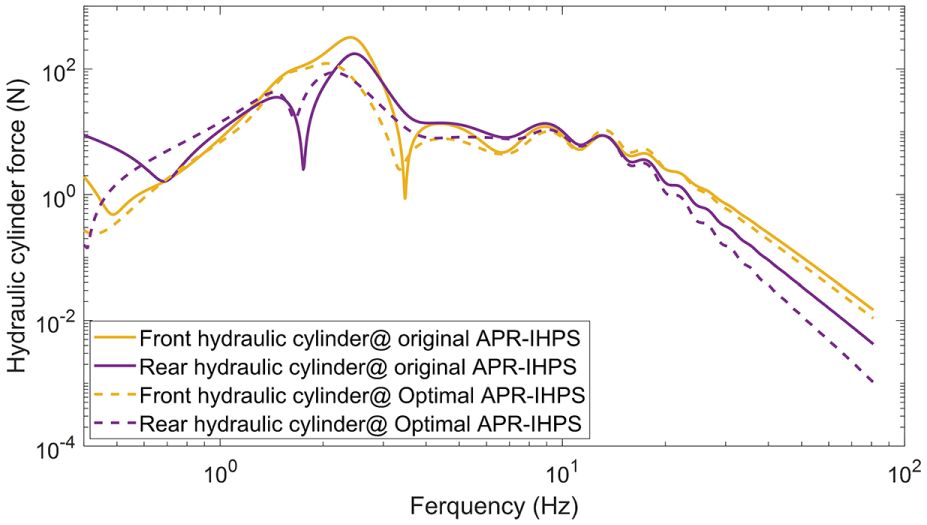
Comparison of hydraulic forces under different design parameters.
Conclusion
In this study, a PR-IHPS system has been presented to improve both pitch and roll dynamics for ambulances to meet the requirements of stability and ride comfort. The coupled dynamic equations of APR-IHPS system have been derived using impedance transfer matrix method. Based on the coupled equations, the characteristics of PR-IHPS system are quantitatively analyzed, which indicates that the additional stiffness mainly depends on the capacities of accumulators and cross-sectional areas of hydraulic cylinders. When the front and rear cylinders of the same size are oppositely installed, only the pitch and roll stiffness for vehicle body are provided by PR-IHPS system, while the bounce-stiffness is not provided. The additional damping characteristics can be determined by adjusting the loss coefficients of damper valves. Particularly, the damping of pitch and roll motions for vehicle body can be controlled by tuning the loss coefficients of ADVs.
In addition, a MESD method is proposed which can obtain the vibration energy for each motion-mode in frequency domain. Then, the parametric design approach for PR-IHPS is also presented based on the proposed MESD method. The desirable parameters of PR-IHPS system are obtained by the parametric design approach taking both ride comfort and handling performance into consideration. The simulation results show that (1) minimal bounce-stiffness and large pitch/roll stiffness could be achieved by the design of cylinder area ratios, (2) the design range for capacity of accumulator could be determined to have a reasonably distribution of stiffness between pitch and roll motion, and (3) the overall performance for the lying patient can be significantly improved by the parameter optimization of the PR-IHPS system. For future work, one task for our ongoing researches is evaluation of handling performance on time domain transient responses with respect to emergency braking and steering. In addition, implementation and validation of the proposed approach including both suspension subsystem and complete system-level field testing will be conducted.
Footnotes
Appendix 1
Appendix 2
Appendix 3
Handling Editor: Jose Ramon Serrano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Some of the work presented herein was partially funded by Chinese National Natural Science Foundation (grant no. 51675152) and Hunan Provincial Science Foundation of China (grant no. 2017JJ2031). Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the particular funding agency. The authors are grateful for the support obtained.