
Abstract
Transportation of electrification has become a hot issue in recent decades and the large-scale deployment of electric vehicles has yet to be actualized. This article proposes a powertrain parameter optimization design approach based on chaotic particle swarm optimization algorithm. To improve the driving and economy performance of pure electric vehicles, chaotic particle swarm optimization algorithm is adopted in this study to optimize principal parameters of vehicle power system. Vehicle dynamic performance simulations were carried out in the Cruise software, and the simulation results before and after optimization were compared. Simulation results show that optimized vehicles by chaotic particle swarm optimization can meet the expected dynamic performance and the driving range has been greatly improved. Meanwhile, it is also viable that the parameters of the optimal objective function can achieve the purpose of balancing the driving performance and economic performance, which provides a reference for the development of vehicle dynamic performance.
Introduction
Energy crisis is an urgent issue nowadays, and more and more attention is paid to new energy resources. In automobile industry researchers and technicians focus on developing pure electric vehicles (EVs) of high efficiency, energy saving, and zero emissions. But the pure EV’s core technology has not yet reached the top level; its cost and performance cannot fully meet the needs of the market. The difficulty in achieving the balance in dynamic and economy has become a bottleneck restricting the further development of pure EVs.
In recent years, many scholars and research institutions have done a lot of research work in the optimization algorithm. Among them, various intelligent algorithms are the most prominent, such as genetic algorithm, evolutionary algorithm, direct algorithm, simulated annealing algorithm, multidisciplinary optimization algorithm, and various combinations of algorithms.1–8 Fan 9 used the genetic algorithm to optimize the size and battery management logic of the hybrid powertrain and obtained reasonable component size and parameter matching solution. Wu et al. 10 adopted multi-objective evolutionary algorithm to optimize the hybrid power, and optimized results are more conducive to battery life and improve power efficiency. S Chen 11 used particle swarm optimization (PSO) algorithm for pure EV transmission system; the results obtained proved that the vehicle economy and power have been effectively improved. Zhang et al. 12 adopted evolutionary algorithm to optimize the hybrid power system control strategy globally of hybrid electric city bus; the parameters of the control strategy can be determined accurately, which can improve the fuel economy and pollutant emission. Ant colony genetic algorithm is used to optimize the dynamic parameters of pure EVs. 13 The optimization results show that it is feasible to apply the ant colony algorithm to match the parameters of pure EV power system. Zhou et al. 14 proposed a hybrid electric vehicle (HEV) sizing method using Chaos-enhanced acceleration particle swarm optimization (CAPSO) algorithm to achieve the global optimization. The paper focuses on the component sizing optimization of HEV powertrain system, but does not deal with the optimization of HEV or EV economy and power performance. Jiang et al. 15 applied an improved chaotic particle swarm optimization (ICPSO) algorithm to optimize the key parameters of energy management strategy. The paper improves vehicle economic performance; the vehicle dynamic performance is not involved. Dong et al. 16 proposed a chaotic particle swarm optimization (CPSO) algorithm to solve the route optimization problem of parking lots. Pehlivanoğlu 17 applied a vibrational mutation PSO combining the idea of mutation strategy to solve path planning problem of unmanned aerial vehicle.
From the literature review above, it is still an open issue to effectively make the powertrain components operate at high efficiency so that dynamic performance and the driving range have been greatly improved, especially in principal parameters of powertrain multi-objective optimization for pure EV. This article proposes a powertrain parameters design approach based on CPSO algorithm. The principal parameters of powertrain (including peak power of motor, battery’s capacity and final drive ratio) are set as the optimized variables by CPSO, with the vehicle performance index (maximum speed, acceleration time, and maximum grade) being defined as the constraint conditions.
The rest of this article is organized as follows. Section “Establishment of vehicle model” presents the vehicle models in detail. The CPSO algorithm for powertrain parameters is proposed in section “CPSO algorithm.” The optimization results and discussion are given in section “Analysis of results.” Finally, the conclusions and future work are given in section “Conclusion.”
Establishment of vehicle model
Whole vehicle model
The whole vehicle model contains a wide range of modules such as battery, gearbox, motor, brake, tire, and MATLAB DLL module is related to the economy of EVs and include strategy of regenerative braking. It can establish a simple vehicle simulation model by selecting the appropriate parts from the model library and dragging them to the modeling panel. The parameterization of pure EV mainly includes that of whole vehicle, electromotor, and battery components. The EV vehicle model is shown in Figure 1.

EV whole vehicle model.
The EV vehicle module contains the basic information of the vehicle including vehicle curb weight, vehicle gross weight, wheel base, height of center of gravity, windward area, drag coefficient of air resistance, and so on. The important parameters of the vehicle module are shown in Table 1.
Vehicle module parameters.

Electromotor module
Electric motor is one of the core components of EVs. The accuracy of the electric motor model has significant influence on the precision of EVs simulation results. The basic parameters of the electromotor module include the rated voltage, electromotor speed, electromotor inertia, maximum current, electromotor thermal characteristics, and so on. It is also necessary to input the external characteristic curve (Figure 2) of the electromotor and the map diagram of the electromotor efficiency (Figure 3).
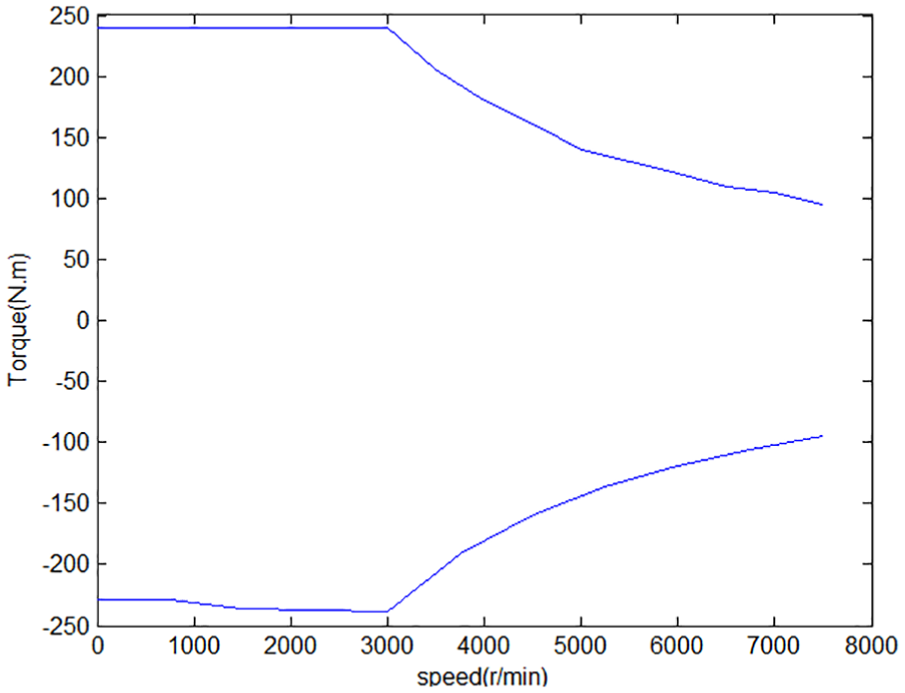
The external characteristic curve of electromotor.

The map diagram of electromotor efficiency.
Battery module
Battery, as energy storage device of EV, plays an important role in the development of EVs, while its electro-chemical process is a complex nonlinear process, which is sensitive to environment. Lithium-ion battery, which has the advantages of environmental protection, good performance, high specific energy, and high specific power and is very popular in society, is used in this research. Taking the internal resistance into consideration, this research uses a simple battery model to calculate the current and finally get the battery charge and discharge power.
The ideal battery power

where
The important input parameters of the battery model are the rated capacity of the battery, the nominal voltage, the highest and lowest voltage, the series-parallel connection of voltages, and the relationship between the cell voltage and the State of Charge (SOC) at normal atmospheric temperature. The parameters in this curve are put into the battery model accurately, as shown in Figure 4.

The relationship between charging and discharging battery voltage and SOC.
MATLAB DLL control module
The MATLAB DLL control module contains the regenerative braking control strategy, which is closely related to the vehicle economy. The control strategy of the module is shown in Figure 5.
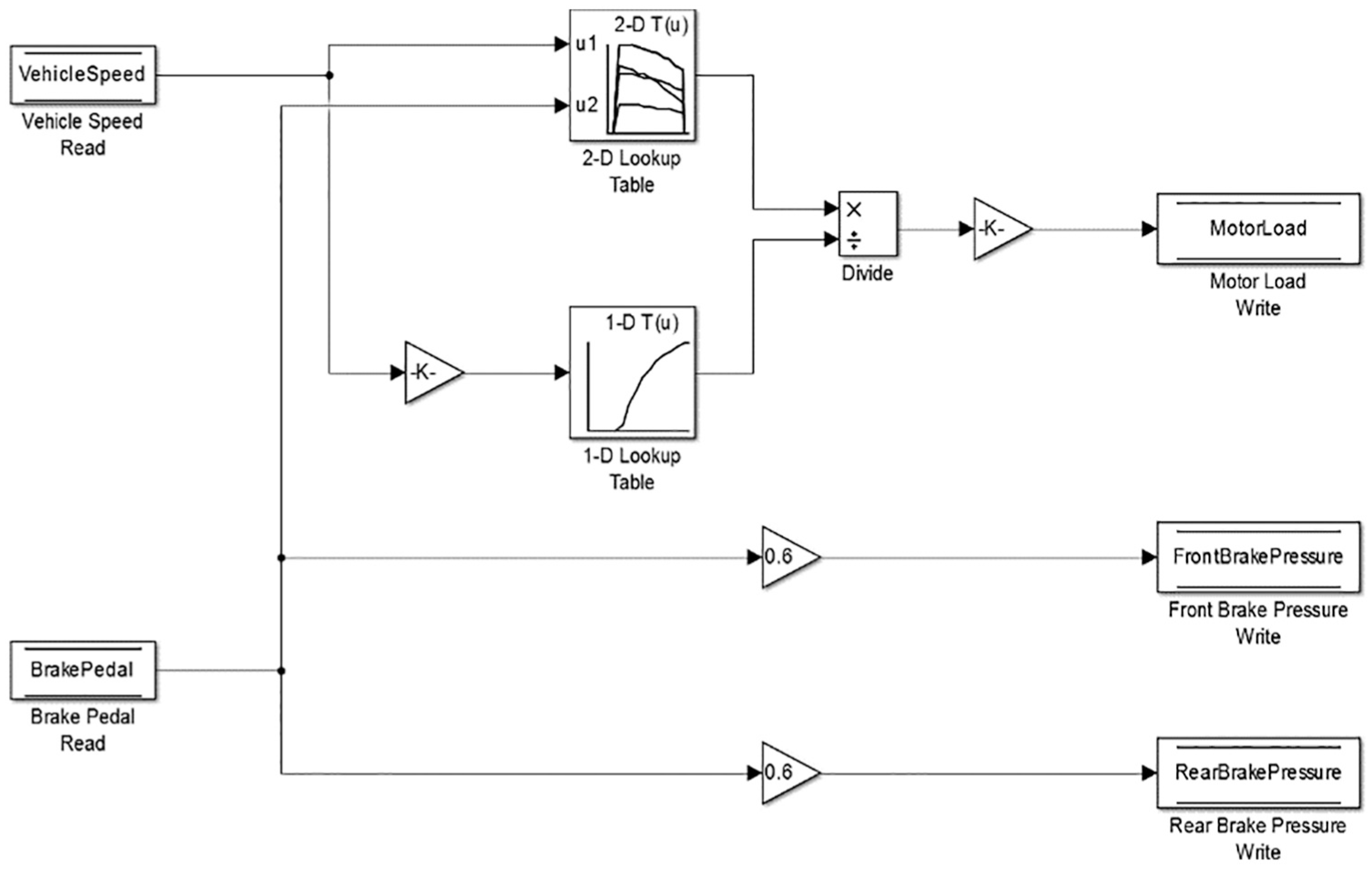
Regenerative braking control strategy.
As shown in Figure 5, the regenerative braking control strategy of the module receives data about brake pedal and vehicle speed. And then the motor load, the front brake pedal pressure and the rear brake pedal pressure are calculated through a series of algorithms. Through a series of algorithms, the motor load, front brake pedal pressure, and rear brake pedal pressure are obtained. When the speed is less than or equal to 10 km/h, the energy recovery is not set because of the small braking energy. When the speed is greater than or equal to 120 km/h, the energy recovery is not set because of the fast speed and safety. When the vehicle speed is from 10 to 120 km/h and SOC is less than 95%, the motor torque and power are always set as the maximum output to maximize energy recovery.
CPSO algorithm
The optimization of EV power system aims to improve the economy and reduce vehicle cost, while ensuring the dynamic performance. In fact, it basically is a multi-objective optimization issue with constraints. The traditional PSO algorithm brings about many drawbacks in dealing with multi-objective optimization problems with constraints.
In this research, it combines chaos algorithm with particle warm optimization algorithm to develop a new optimization algorithm–CPSO. In order to prevent some particles from stagnating in the iterative process and fall into the local non-optimal region, a chaotic variable S is generated at the same time as the optimization variable X, and the optimization variable is transformed into a chaotic variable by the carrier, so that the optimization variable is different from the previous state, the results are calculated in the anti-chaotic way to obtain the optimal results, thus solving the basic particle swarm algorithm premature convergence and other issues. The specific steps of CPSO algorithm are as follows:
Determine the particle size, the learning factor, the number of iterations and the weighting factor, and initialize the velocity and position of each particle randomly.
The velocity and position of the particles in equation (2) are updated according to the basic particle swarm algorithm

Chaotization in the optimal location (
Map

Get chaotic sequence (
Map the chaotic sequences back to the original solution space using the following equation

It produces a feasible sequence of chaotic variables:
Calculate the fitness value of vector in each feasible solution and preserve feasible solution vector, written for
Select a particle from the current particle swarm randomly and replace the position vector of the selected particle with the position vector of
Jump to Step 2, until the calculation is up to the maximum iterations number or satisfactory solution.
Because in the traditional PSO algorithm, the initial and evolutionary stages of particles are random, which leads to aimless updating of

The flow chart of the chaotic particle swarm algorithm.
As shown in Figure 6, the key idea of CPSO algorithm is shown in two aspects. First, the initial position and velocity of particles are reset by chaotic sequence. After chaotic processing, the diversity of particle swarm traversal is optimized, while the original stochastic characteristics of traditional PSO algorithm are preserved. On the basis of the initial population, the initial population is selected from among them. Second, a chaotic sequence is formed based on the optimal position of all the current population to the end of the search, and the best position individual in the chaotic sequence is used to replace the position of one individual in the current population. Because there are many adjacent points in the local optimal solution in each rotation, the search algorithm of chaotic sequence is introduced. Thus, the inert individual can get rid of the local minimum and find the optimal solution quickly.
Optimization goals
Acceleration demand rather than maximum speed and climbing capability determines the peak power of the motor, so the peak power of the motor is directly related to the vehicle acceleration performance. Power battery capacity directly determines the size of the tram economy. The selection of transmission ratio of main reducer is also closely related to the vehicle performance of EVs. Therefore, the above three parameters are chosen as the optimization variables, expressed as

where
Optimization goals
Driving range
According to international standards, the driving range under the New European Driving Cycle (NEDC) condition and constant 60 km/h condition are important indicators of vehicle economy. The driving range in the NEDC is calculated by integrating the velocity function at each moment

where N is the number of segments;
Energy consumption
Energy consumption is evaluated through the simulations of two driving conditions: constant 60 km/h condition and NEDC condition. As the NEDC condition is not a constant, instead it is composed of four urban driving conditions and one suburb driving condition


where

where
The energy consumption of NEDC is as follows

where
Establishment of constraints
In the establishment of the constraints, it is necessary to take the dynamic performance and the ratio of the final drive into account, and also consider the battery energy requirements decided by driving mileage under constant 60 km/h condition and the battery discharge power under the 55% SOC.
Constraint conditions under the maximum velocity

Constraint conditions under the acceleration time

where
Constraint conditions under the maximum climbing degree

where
Constraint conditions under the driving range of single full charge

where
Constraint conditions under the power of the electromotor and the maximum power demand of the electromotor

where
Constraint conditions under the powertrain parameters

where
Generally, the penalty function method is used to handle constraints in optimization problems, it can convert constrained optimization problem to unconstrained optimization problems. Therefore, the new objective function is expressed in equation (16)

where n is number of constraint condition;
A relative optimal solution of fi(x) can be figured out when an appropriate m is chosen. If the penalty factor is too big or too small, the accurate value of the new objective function will be affected. Therefore, it is necessary to select the appropriate penalty factor through many times of adjustment and verification.
Analysis of results
In this article, the scale of the particle swarm is 40, the learning factor is 2.05, and number of iterations is about 1200. The optimal variables are peak power of motor, power battery capacity, and final drive ratio in turn. The objective of optimization is to minimize energy consumption and better driving performance.
CPSO algorithm is developed in MATLAB. After a series of calculations, the optimized parameters are compared with the original ones, as shown in Table 2.
Comparison of vehicle parameters before and after optimization.

The optimized parameters were put into the CRUISE for simulation. The simulation results after optimization are compared with the original ones as shown in Table 3.
Comparison of vehicle performance parameters before and after optimization.

NEDC: new european driving cycle.
The driving mileage under NEDC condition before and after the optimization are shown in Figure 7 and Figure 8 respectively.

Driving mileage under NEDC condition before the optimization.

Driving mileage under NEDC condition after the optimization.
The comparison results under NEDC condition show that the driving mileage of EV after the optimization is significantly improved from 210.44 to 256.87 km. The driving mileage under constant 60 km/h condition before and after the optimization are shown in Figure 9 and Figure 10 respectively.

Driving mileage under constant 60 km/h condition before the optimization.

Driving mileage under constant 60 km/h condition after the optimization.
The comparison of simulation results before and after optimization under constant 60 km/h shows that the driving mileage of EV after the optimization is significantly improved from 269.31 km to 311.98 km. It is similar to the simulation results under NEDC condition, the effect of economic performance optimization is obvious.
To summarize, according to above optimization results, the maximum velocity has decreased but acceleration time reduced slightly, and maximum climbing degree has increased. The driving mileage with NEDC condition of EV increases to 256.87 km, and the mileage with constant 60 km/h condition of EV increases to 311.98 km. With the increase of battery capacity, there is a rise in the vehicle weight and then followed by a small climb in the rate of energy consumption. It is feasible to optimize the parameters of power system for pure EV by CPSO, which extends the application range of particle swarm algorithm.
Conclusion
In this article, the parameter optimization of power system for pure EV was investigated using CPSO method in the MATLAB and CRUISE software. Through establishing the objective function of the longitudinal vehicle dynamics, the CPSO algorithm was developed to optimize the parameter of power system. Some performance simulations were carried out and the simulation results before and after optimization were compared. It can be concluded that it is feasible to apply the chaotic particle swarm to the optimization of the vehicle longitudinal dynamics target. Meanwhile, it is also viable that the parameters of the optimal objective function can achieve the purpose of balancing the power performance and economic performance, which provides a reference for the development of vehicle power performance.
Footnotes
Handling Editor: Dumitru Baleanu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors would like to acknowledge the financial support of Collaborative Innovation and Platform Environment Construction Project of Guangdong Province (2015A050502053) and Hebei provincial High Level Talents Foundation of Hebei Province (A2016002025) and Hebei Province Key R & D Project (17394501D). The authors also would like to acknowledge the financial support of Natural Science Foundation of Characteristic Innovation project of Guangdong Ordinary University and Science and Technology Research Project of Hebei Higher Education (ZD2017213). The authors also would like to acknowledge the financial support of subsidized projects for overseas students (CL201705).