
Abstract
A multi-dimensional lumped element model of a long non-rotating rod that moves on a slick surface with both dynamic and static Coulomb friction is outlined. The rod is accelerated to a constant velocity, and the free end of the rod experiences the effect of stick and slip. This article describes a new modeling approach, where the model is able to switch between different linear semi-analytical sub-models, depending on how much of the rod is moving. Fundamental understanding of the stick–slip effect is revealed, and a potential shortcoming of the model is also discussed. The model is computationally effective and may be suitable for real-time applications in, for instance, oil-well drilling.
Introduction
The complex phenomenon named dry friction occurs when two surfaces are in contact with each other. Experiments indicate dependence on a number of parameters such as normal force, combination of materials, roughness, temperature, sliding speed, and even acceleration. Depending on the application, the friction models may have functional relations with velocity, time lag, or dwell time, or include pre-slip displacement. In Berger’s study, 1 a multi-disciplinary review of the plethora of friction models is given, while in Feeny et al.’s study, 2 a historical review on dry friction and the stick–slip effect is given.
However, in many applications, the original model by Charles Augustin Coulomb is often a sufficient approximation. The sliding Coulomb friction force is directed opposite to the sliding motion, and the magnitude is equal to the normal force multiplied by a kinematic friction coefficient. When the surfaces stick together, the static Coulomb friction force can have any direction, and the magnitude can be anything between zero and the static friction coefficient multiplied by the normal force. Mathematically, this model is therefore highly non-linear.
A common way to model the Coulomb friction force is to use a functional relationship with velocity, that is,
Another way to model the Coulomb friction is to work directly with the discontinuous relations and switch between models when the surfaces go from stick to slip, and vice versa. The sub-models are typically linear and can sometimes be solved analytically. In Cull and Tucker, 5 torsional vibrations of an oil-well drillstring are analyzed with both modeling types. It was shown that the models compare well, when the kinematic friction coefficient is not small compared to the static friction coefficient, and the viscous damping is relatively small.
A switching modeling approach with sub-models that are linear with analytic or semi-analytic solutions is well suited for real-time applications such as control algorithms, fault detection, and parameter estimation. This is therefore the model of choice in this article.
Similar to Cull and Tucker, 5 our motivation is related to oil-well drilling where kilometer-long pipes are frequently run into or pulled out of wellbores. The models in Cull and Tucker 5 contain only two degrees of freedom and describe important physical phenomena but are not appropriate for the complex geometries of real wells.
Fortunately, a number of semi-analytical models for both the axial and torsional movements of an oil-well drillstring in both vertical and deviated wellbores are developed. In Hovda, 6 axial vibrations of a vertical wellbore are described, while the axial vibrations of a deviated wellbore while reaming are outlined in Hovda. 7 A model for the torsional vibrations is presented in Hovda. 8
These semi-analytical models are particularly suited for a switching model approach, since they can include three-dimensional wellbore geometries and non-homogeneous pipe sizes. For the sake of exposure, we have focused our study to a straight rod with uniform thickness, with homogeneously distributed friction forces along the rod. This model can easily be generalized in many ways, but this is outside the scope of this article. The goal of this article is merely to describe and validate the model with a variety of computational experiments that are physically intuitive.
The general model is outlined in the next section, and computational experiments are given in the section after that. The model relies on various assumptions, which are defined when needed, and furthermore discussed and summarized in the “Discussion” section. The article is concluded in the last section.
Dynamic model of a long non-rotating rod that is moving on a surface with Coulomb friction
We consider a rod of length L that is modeled as a set of n blocks that are connected by n spring elements (see Figure 1). The inclination angle of the rod is denoted by

Schematic view of the model of the rod that is sliding on the surface. The rod is modeled as a set of n blocks with masses denoted by
The center point on each block is denoted as
Newton’s second law on every block gives

where for block i,
Coulomb friction forces
Coulomb friction states that the friction force between two sliding surfaces is proportional to the normal force with direction that opposes the motion. Moreover, two surfaces stick together unless the force between the surfaces exceeds the normal force multiplied by the static friction coefficient. The static friction coefficient is typically higher than dynamic friction coefficient. The static friction is considered to arise as a result of surface roughness features across multiple length scales at solid surfaces.
The kinematic Coulomb friction on block i is

where

In this article, situations when the rod is starting from rest and being pulled out are discussed. In this case, it makes sense to make the assumption that if a block i is stalled in static friction, that is,
Consequently, in the situations discussed in this article, we have
At a certain time, a model for the rod involves a sub-model of the top
In order to find a model for when block number

This concludes the criterion for moving to a model with
Mathematical model for
elements
We follow the same procedure as in Hovda
6
and develop equation (1) into a system of

where all matrices are square of the size

where
We make the coordinate transformation
Then, equation (4) takes the form

which means that when all derivatives are zero and the driving force is zero, all

where
This is a linear system of first-order ordinary differential equations

which has the solution by using integrating factors

where
This decomposition contains all the parameters in the model, which limits the possibilities of detection of unknown parameters. We have therefore found a trick to avoid this by assuming that

where

We define

where the diagonal elements of the diagonal matrices

and the inverse of this block matrix is

which is easily verified by checking that

and

respectively. We therefore have the full solution
By noting that the derivative of

Similarly, we see that the accelerations are given by

The challenges with solving this set of equations are to compute the convolutions
Here, when m is positive, the operator
By noting that the

This means that when Q is a polynomial, we have an analytic solution for movement anywhere in the rod. Moreover, it is important to note that we can also use piecewise polynomials which allow for a rich variety of movements at the top. An obvious recommendation is that the derivative should be continuous over the breaks.
Computational experiments
Although the outlined model describes a rod with varying cross-sectional areas, where both the static and the dynamic Coulomb friction coefficients can vary anywhere along the rod, we focus our attention on the most basic cases.
We keep all masses and springs equal and keep both the dynamic and static Coulomb friction coefficients constant along the rod. As seen by equations (1) and (4), the effect of the angle
In the computation experiments, we vary the static Coulomb friction coefficients
In order to get some physical intuition about the linear friction coefficient c, we assume that the rod is sliding inside an outer pipe that is filled with water with viscosity of 1 cP. If we also assume that the diameter of the outer pipe is twice the diameter of the rod and that the weight of the rod is 25 kg per meter, then an approximation of the linear friction coefficient is

according to Hovda,
6
where
Furthermore, in this article, we discuss driving forces that are limited to this piecewise polynomial

which describes when the rod is accelerated to the speed V in the period from

Note that by taking the second derivative of equation (6) with respect to
In this article, we consider three initial conditions:
Rest, but previous pullout: This is
Rest, but previous run in: This is
Rest, but previous rotation: This is
Basic experiment that describes the undamped motion with equal static and dynamic Coulomb friction coefficients
In this case, the rod starts at rest from previous pullout. In the beginning
In Figure 2, we see the positions, the velocities, and the accelerations of the rod at various places, where
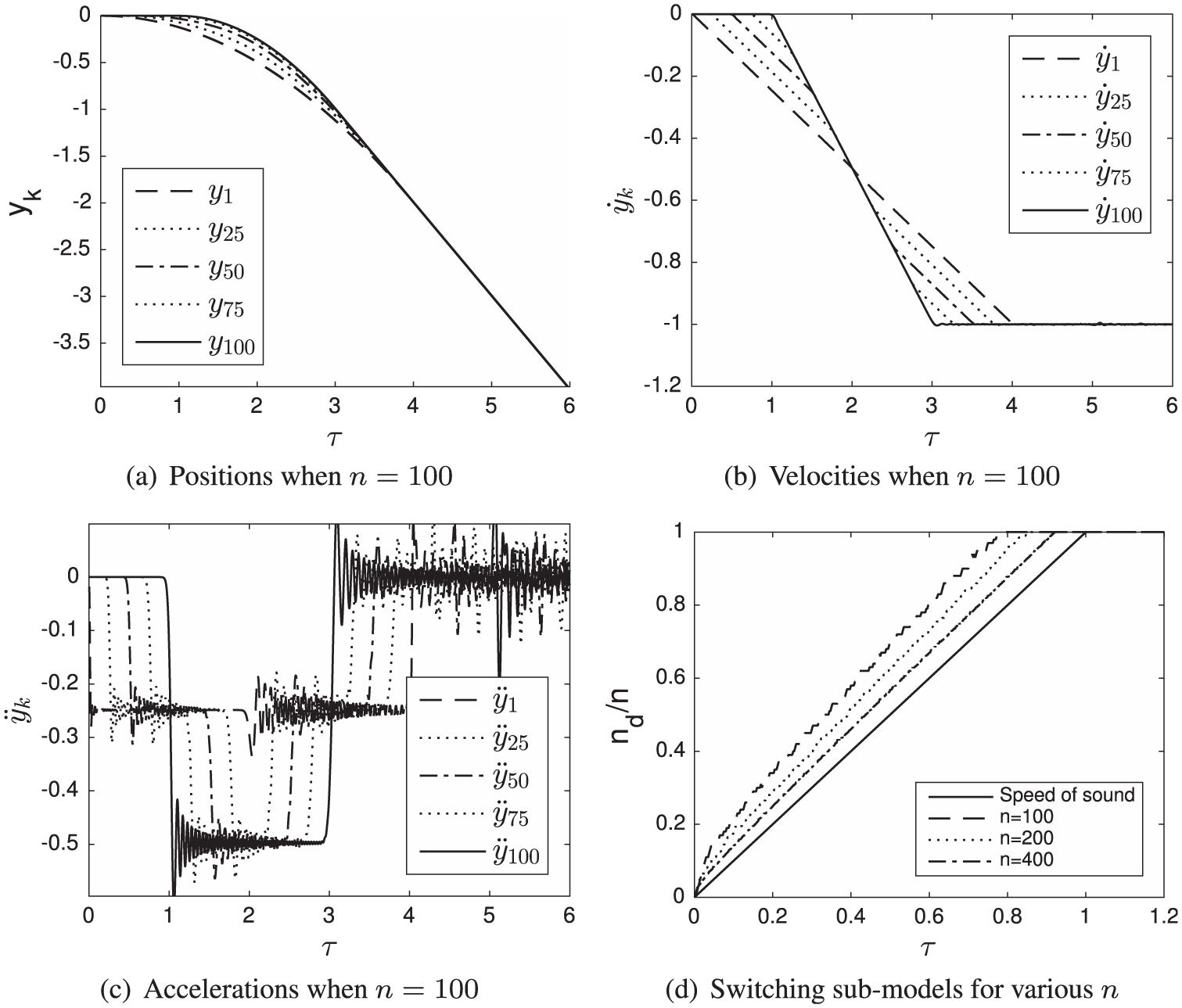
(a–c) The positions, velocities, and acceleration at various places in the rod. The parameters are
At
In Figure 2(d), we see a plot that describes how the model is switching between various sub-models. As expected, when the rod is at rest,
This is believed to be a consequence of the way we model the rod. Movement of the first block starts faster than the speed of sound, since the sub-model has too few blocks to incorporate this effect. Sub-models that contain more blocks are more accurate and the propagation speed becomes the speed of sound. By increasing n, we see in Figure 2(d) that this inaccuracy is reduced, that is, the movement at the bottom approaches the logical limit of one. However, the problem will always occur in the first few blocks.
Experiment that describes the undamped motion when the static is larger than the dynamic Coulomb friction coefficient
In this case, the rod also starts at rest from previous pullout. In the beginning
In Figure 3(a), we show the velocities at various places in the rod for

(a) The velocities in various places of the rod, when the parameters are
In Figure 3(b), we see the effect of switching between sub-models. For the first block, it does not start to move before the rod has moved long enough to overcome the static friction force. This is slower than the speed of sound. The movement of the last block is limited by the speed of sound. Increasing n has the effect of driving the
Experiment that describes the damped motion for various acceleration lengths
In this case, the rod also starts at rest from previous pullout. Different from the experiment in this section, we have
In Figure 4(a), we see the velocities at various parts of the rod when the acceleration length is one time unit. In the undamped case (not shown), the acceleration at the bottom is a sum of two square waves, where the second square wave has opposite amplitude and starts one time unit later. Therefore, the acceleration at the bottom is zero in first time unit,

The derivative of the position in various places in the rod for various acceleration lengths. The other parameters are
The important result of Figure 4(a) and (b) is that the velocity can reach zero when
Figure 4(c) and (d) is added to show that the movement in the rod continues if the acceleration phase exceeds four time units. We therefore suggest that if one wants to avoid vibrations, the acceleration phase should be about four time units. In a practical system with damping and possibly non-homogeneous pipe size, one should aim for four times the first eigenfrequency.
Experiment that describes the effect of stick–slip
In this case, the rod also starts at rest from previous pullout. We let the acceleration phase be one time unit, that is,
Figure 5(a) and (b) shows the movement of the rod in various places. Stick–slip occurs when

Movements in various places in the rod in the case of stick–slip. The other parameters are
By investigation equation (3), we see that the
Experiment that describes when the initial conditions are not pulling out
In this case, the rod starts at rest from previous rotation or previous running in. We let the acceleration phase be one time unit, that is,
Figure 6(a) shows the velocities of the rod in various places, when the previous motion was rotation. Because the rod needs to stretch before it moves, it actually takes exactly two time units before the

Movements in various places in the rod in the case when the initial condition is not previous pullout. The other parameters are
In Figure 6(c), we see the velocities of the rod in various places, when the previous motion was pulling in. It takes even longer for the whole rod to move, because the previous motion was running in. After
Model switching is shown in Figure 6(d). There is a shift in how fast the models are changing around
Discussion
The results of the computational experiments are obviously dependent on the physical assumptions that are made. In this section, we summarize and briefly discuss all assumptions that are made.
The rod is assumed to be perfectly elastic which means that the axial stresses are always far away from the yield stress. Moreover, we have made the assumption that
Furthermore, we have assumed that the damping is perfectly linear, where viscous damping is given as an example of such damping. As discussed in Hovda,
6
viscous damping is not perfectly linear due to the time- and acceleration-dependent Basset forces. However, in the case when the system is strongly underdamped, such as when the rod is a drillstring in an oil well, this approximation may still be appropriate. We have also assumed that the system is proportionally damped by using the relation
We have also made the assumption that the rod is having no lateral motion. The rod has to move in a straight line without leaving contact at any point with the supporting surface.
In this article, we have induced some restrictions to the movement at the top. In particular, the topside movement is constrained to that start from rest and end with constant pullout. How the motions are stopped is not described. This would require that the movement of the first few blocks would stop, while blocks below are in movement. This is a violation of the assumption that if a certain block is at rest, all the blocks below are also at rest. It is also a violation of the assumption that
We are confident that the model can be expanded to yield any movement that is starting from any initial conditions by changing the above assumptions. Describing this is an expositional challenge within the constrained space of a scientific paper, and hence, this generalization is not described in this article.
A final comment about topside movements is that Q is constrained to follow piecewise polynomials. In a practical setting, this makes sense, since the polynomials can approximate any discrete sequence.
A final point regarding approximations that are made in this article is that the mass of the rod is modeled as distinct point masses rather than distributed uniformly. In Cull and Tucker, 5 we have discussed that a Gibbs-like pattern is evolved when the topside movement is discontinuous. In a practical setting, this ringing artifacts will be seen in the accelerations. The frequency of the ringing is dependent on the number of blocks. The number of blocks in the sub-models increases from 0 to n, meaning that this artifact is always present in the beginning when the movement is starting from rest. This is important for interpreting results from the simulations correctly.
Conclusion
This article describes the movement of a long rod that is sliding on a surface with static and dynamic Coulomb friction. The model is using a method for switching between various linear lumped element models. Since the sub-models have analytic solutions, the only computational complexity is finding zero-crossing related to the sub-model switching. The model is therefore suitable for a real-time application.
The experiments conducted in this article show that the model makes physical sense and seems appropriate for describing the effect of stick–slip. We have also shown that
A shortcoming of the model is that the friction is limited to happen at certain distinct points. For a perfect slick pipe, increasing n will give n-dependent oscillations that are not real as discussed in this section. However, in the case of a drillstring that is made up of a number of pipe joints, the connection points between the pipe joints are typically the only points of contact. In the case of a drillstring sliding in a deviated wellbore, we can therefore expect these oscillations, and choosing an n that is equal to the number of pipe joints may be an excellent choice.
Footnotes
Handling Editor: Yunn-Lin Hwang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.